
Attractor Neural States: A Brain-Inspired Complementary Approach to
Reinforcement Learning
Oussama H. Hamid
1
and Jochen Braun
2
1
Department of Computer Science and Engineering, University of Kurdistan Hewl ˆer, Erbil, Kurdistan Region, Iraq
2
Department of Cognitive Biology, Otto-von-Guericke University, Magdeburg, Germany
Keywords:
Attractor Neural Networks, Model-Based and Model-Free Reinforcement Learning, Stability-Plasticity
Dilemma, Multiple Brain Systems, Temporal Statistics.
Abstract:
It is widely accepted that reinforcement learning (RL) mechanisms are optimal only if there is a predefined
set of distinct states that are predictive of reward. This poses a cognitive challenge as to which events or
combinations of events could potentially predict reward in a non-stationary environment. In addition, the
computational discrepancy between two families of RL algorithms, model-free and model-based RL, creates
a stability-plasticity dilemma, which in the case of interactive and competitive multiple brain systems poses
a question of how to guide optimal decision-making control when there is competition between two systems
implementing different types of RL methods. We argue that both computational and cognitive challenges can
be met by infusing the RL framework as an algorithmic theory of human behavior with the strengths of the
attractor framework at the level of neural implementation. Our position is supported by the hypothesis that
‘attractor states’ which are stable patterns of self-sustained and reverberating brain activity, are a manifestation
of the collective dynamics of neuronal populations in the brain. Hence, when neuronal activity is described at
an appropriate level of abstraction, simulations of spiking neuronal populations capture the collective dynamics
of the network in response to recurrent interactions between these populations.
1 INTRODUCTION
In machine learning and other artificial intelligence
(AI) related disciplines, the theory of reinforcement
learning (RL) provides an algorithmic account for
gaining optimal action control in sequential decision-
making processes when only limited feedback is
available (Sutton and Barto, 1998; Daw et al., 2005;
Lewis and Vrabie, 2009; van Otterlo and Wiering,
2012; Krigolson et al., 2014; Marsland, 2015). In
the corresponding fields of cognitive science and psy-
chology, RL describes the practice by which animals
and humans probe reward contingencies while acting
in a novel environment (Schultz et al., 1997; Doya,
2007; Niv and Montague, 2008; Shteingart et al.,
2013).
Despite indisputable advances in RL research over
the past two decades, two challenges still remain: a
computational and a cognitive one (Gershman and
Daw, 2017). One accumulating evidence from cog-
nitive science and brain research suggests two quite
different conceptual frameworks for thinking about
learning (Gallistel and King, 2009). Though meth-
ods of both frameworks involve experience, they dif-
fer in the way and extent to which they impose com-
putational load so as to achieve a high level perfor-
mance (Dayan and Berridge, 2014). In the first frame-
work, termed as model-free RL, learning is the abil-
ity of a plastic brain to modify itself (by experience)
in order to operate more efficiently in a novel envi-
ronment. Such a modification affects both the struc-
ture and the function of the brain (Davidson and Be-
gley, 2012; Phelps et al., 2014). Synonym terms for
this type of RL approach are habitual learning, ret-
rospective revaluation, and reflexive decision-making
(Dolan and Dayan, 2013). The second framework,
called model-based RL, conceptualizes learning as
the process of deducing (also from experience) struc-
tural characteristics of the operating environment in
order to shape subsequent behavior (Hamid, 2015).
Informing behavior takes place in that the derived in-
formation is carried forward in memory (Gallistel and
King, 2009). Synonym terms for this type of RL ap-
proach are goal-directed behavior, prospective plan-
ning, and reflective decision-making (Friedel et al.,
2015). In the human brain, mechanisms of model-
H. Hamid O. and Braun J.
Attractor Neural States: A Brain-Inspired Complementary Approach to Reinforcement Learning.
DOI: 10.5220/0006580203850392
In Proceedings of the 9th International Joint Conference on Computational Intelligence (IJCCI 2017), pages 385-392
ISBN: 978-989-758-274-5
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

free RL were linked to corticostriatal circuits, in-
volving ventral striatum and regions of the amygdala
(Balleine et al., 2007), whereas the prefrontal cortex
was found to be the substrate for model-based RL
mechanisms (Mante et al., 2013). Though each of
the two frameworks was successfully tested in its own
domain, current research points out some of the chal-
lenging issues in rounding out the theory of RL as an
integrative account of human behavior.
Computational considerations, too, are the focus
of extensive comments on RL methods. Specifically,
comparing the apparently simplistic laboratory con-
ditions with the relatively more complex real-world
decision-making scenarios, as encountered by biolog-
ical agents in their natural environments, a number of
technical factors turn out to be exceptionally decisive
when considering the computational load that should
be imposed by any of the RL learning paradigms on
one side and the biological world on the other side
(Dayan and Berridge, 2014). While laboratory exper-
iments assume mainly low-dimensional, discrete, and
almost fully treatable state spaces, real-world situa-
tions have high-dimensional, continuous and partially
observable state spaces. This implies that the learning
algorithm has to struggle with minimal sets of data
and low frequency of probed situations, as it is almost
impossible for a real-world situation to be encoun-
tered twice with all its circumstantial characteristics
(Gershman and Daw, 2017). Moreover, the discrep-
ancy between the two frameworks of RL in the way
they perform computations creates a dilemma, the
stability-plasticity dilemma, when state-reward con-
tingencies are reversed (Mermillod et al., 2013). It
turns out, although context-specificity is beneficial for
learning in novel stationary environments, it is detri-
mental for flexibility in non-stationary environments.
These inspections point to a fundamental limitation of
the RL framework.
In the following, we shall be arguing that the
above limitations can, nevertheless, be resolved by in-
tegrating the ‘attractor’ framework as a complemen-
tary approach at the level of neural implementation to
the behavioral success of RL theory at the algorith-
mic level. Our position is supported by the hypothe-
sis that ‘attractor states’, which are stable patterns of
self-sustained and reverberating brain activity, are a
manifestation of the collective dynamics of neuronal
populations in the brain (Amit et al., 1994; Hopfield,
1982). Hence, when neuronal activity is described
at an appropriate level of abstraction, simulations of
spiking neuronal populations capture the collective
dynamics of the network in response to recurrent in-
teractions between these populations (Braun and Mat-
tia, 2010). As an illuminating example for potency,
we shall consider the field of associative learning.
The remainder of the paper is organized as fol-
lows. In Section 2 we introduce the theory of re-
inforcement learning including a formal description
of the underlying Markov decision processes and the
two major classes of RL algorithms. Section 3 points
out to current challenges in linking human behavior
to existing RL algorithms. Section 4 discusses how
models in the attractor framework could complement
the RL framework, accounting for the current cogni-
tive challenges. We finally conclude and portray our
plans for future work in Section 5.
2 RL: THEORY & FORMALISM
Historically, RL has its origin in mathematical psy-
chology and operations research (Dayan and Niv,
2008). Inspired by the psychological literature on
Pavlovian (classical) and instrumental conditioning,
Richard Sutton developed, together with Andrew
Barto, algorithms for agent-based learning that later
on became the core ideas for the theory of RL (Sut-
ton and Barto, 1998). Parallel to their research, yet
in a separate line, Dimitri Bertsekas and John Tsit-
siklis, two electrical engineers working in the field of
operations research, developed stochastic approxima-
tions to dynamic programming that allow a system
to learn about its behavior through simulation (ex-
perience) and improve its performance through iter-
ative reinforcement (Bertsekas and Tsitsiklis, 1996).
These lines of research marked the emergence of RL
as an algorithmic theory for optimal decision making
on the basis of behavior and subsequent effects (Niv
and Montague, 2008).
2.1 RL and Markov Decision Processes
In a typical RL setting, a goal-directed agent (this
could be a natural or an artificial system) interacts
with an environment via embedded sets of sensors and
actuators. The sensors provide the agent with infor-
mation about the state of the environment, whereas
the actuators enable the agent to act upon the environ-
ment, causing its current state to change. As a con-
sequence, the agent receives reinforcement in terms
of a numerical signal that describes how close (or far)
it moved to (or away from) its predefined goal (Sut-
ton and Barto, 1998; van der Ree and Wiering, 2013;
Castro-Gonz
´
alez et al., 2014). As the agent moves
along the several states of the environment, the cor-
responding sequence of action-reward combinations
moves on, too.

Decisions in RL can be modeled as a Markov deci-
sion process (MDP). When the state of the operating
environment, however, is subject to inherent uncer-
tainty, modeling takes the form of a partially observ-
able Markov decision process (POMDP) (Kaelbling
et al., 1996; Sutton and Barto, 1998). Formally, an
MDP process consists of two functions, R and T, de-
fined over two sets, S and A . The functions represent
the resulting rewards and state transitions, whereas
the two sets describe the available states and effective
actions, respectively.
In an MDP process, the environment evolves
stochastically under simple discrete temporal dynam-
ics. At time t, the environment is in state s
t
= s. The
agent chooses some action a
t
∈ A, expecting to reap a
certain reward ˆr (expected outcome). Nevertheless, it
experiences the actual consequence of its choice (ei-
ther immediately or later on) in terms of a numerical
reinforcement r ∈ R (actual outcome). Subsequently,
the state of the environment changes its instance into
s
t+1
= s
0
at the next time step t + 1. Moreover, the
agent updates its knowledge about reward contingen-
cies within the operating environment as a reflection
on its very experience. To denote the probability
P(s
t+1
= s
0
|s
t
= s, a
t
= a) of moving from state s into
s
0
when taking action a, we write T(s, a, s
0
). Analo-
gously, the notion R(s, a, r) refers to the probability
P(r
t
= r|s
t
= s, a
t
= a) of receiving a reward at state
s
t
when taking action a. Note that formalizing the re-
ward and transition functions in terms of the current
state rather than the entire history of the environment,
a characteristic referred to as Markov property, pro-
vides a computational advantage, for it requires the
learning algorithm to remember and work with the
parameters that are related only to the current state.
This is definitely easier than dealing with all previous
states of the environment (Maia, 2009; Hamid, 2014).
2.2 Model-Free and Model-Based RL
Based on the way they optimize their learning
and decision-making processes, RL methods can be
sorted into two main classes: model-free and model-
based methods (Dayan and Berridge, 2014).
Though both use experience, model-free RL al-
gorithms assume no a priori knowledge of the MDP
but learn a state-action value function, known as the
‘value function’ (Dayan, 2008). One of the success-
ful implementations of model-free RL methods is the
well-known temporal difference (TD) learning algo-
rithm. It utilizes a reward-prediction error, which is
the discrepancy between the actual and expected re-
wards, to ‘cache’ actually observed information about
the long-term rewarding potencies of the probed ac-
tions. This approach represents a computationally
simple way to exploit experience, for the model needs
only to learn one or two simple quantities (state/action
values). However, it is statistically less efficient, be-
cause the cached information is stored as a scalar
quantity without connecting outcomes to their direct
causes in a distinguishable manner (Dayan and Niv,
2008). Consequently, the model’s performance is
most likely to suffer from two shortcomings. First,
the model cannot (later on) extricate insights about
rewards or transitions from the cached value. Sec-
ond, the cached information intermixes previous es-
timates or beliefs about state values regardless their
sometimes erroneous valence. As a result, model-free
RL methods lack an appropriately quick adaptation
to sudden changes in reward contingencies (Hamid,
2015). Because of this characteristic, model-free RL
was proposed as the underlying model for habitual
controllers, in which actions are presumably based
on habits (Daw et al., 2005). This key characteris-
tic links model-free RL to corticostriatal circuits in-
volving, in particular, the ventral striatum and regions
of the amygdala in the human’s brain (Packard and
Knowlton, 2002; Balleine et al., 2007; Dayan and
Balleine, 2002).
Model-based RL is a family of algorithms that
generate goal-directed choices by utilizing an explicit
model of the underlying MDP process. This sums
up representations of the environment, expectations,
and prospective calculations to make cognitive pre-
dictions of future values (Daw et al., 2005; Dayan and
Berridge, 2014). Specifically, model-based RL algo-
rithms capture the dynamics of the MDP in terms of
state transition probabilities. Such probabilities can
be presented as a tree connecting short-term predic-
tions about immediate outcomes of each action in an
arbitrary sequence of actions. Deciding which ac-
tion is more beneficial can then be done by exploring
branching sets of possible future situations. There are
several ‘tree search’ techniques that can do this (Daw
et al., 2005). It turns out that exploiting experience
in the case of model-based RL is more efficient than
in model-free RL for two reasons. First, it provides
more statistical reliability, especially when storing the
sometimes unrelated morsels of information. Second,
and importantly, it ensures more flexibility in terms
of adaptive planning, which becomes necessary when
changes occur in the learning environment. Hence,
model-based RL accounts best for goal-directed be-
havior that contains more cognitive planning. This
key characteristic links model-based RL to the pre-
frontal cortex in the primate’s brain (Owen, 1997).

3 COGNITIVE CHALLENGES
Besides the above mentioned computational consider-
ations, RL faces cognitive challenges as well. On one
hand, the theory could successfully explain several
characteristics of human and animal learning, e.g.,
blocking (Kamin, 1969), overshadowing (Reynolds,
1961), and inhibitory conditioning (Rescorla and
Lolordo, 1968). It also proved able to predict new
phenomena such as over-expectation (Kremer, 1978)
and managed to account for the relatively touchy ‘sec-
ondary conditioning’: a phenomenon in which a pre-
dictor of a predictor servers as a predictor (Dayan and
Abbott, 2005). However, it still suffers from difficul-
ties in accounting for some human instrumental learn-
ing behaviors. For example, analysis of the stock mar-
ket suggests that a positively surprising obtained pay-
off and a negatively surprising forgone payoffs trigger
a reversal of choice behavior rather than repeating that
behavior according to the recency assumption (Nevo
and Erev, 2012).
Furthermore, consistent with the idea of inter-
active and competitive multiple memory systems in
the brain (Poldrack and Packard, 2003), recent re-
search addressed the question of how to guide opti-
mal decision-making control in the face of a running
competition between two systems, each of which im-
plements a different type of RL methods (Dolan and
Dayan, 2013).
Another challenge concerns the architecture of the
theory itself. Specifically, it has been argued that
RL mechanisms are optimal only if there is a pre-
defined set of distinct states that are predictive of re-
ward (Doya, 2007). This implies, for an agent be-
having in an RL fashion to achieve successfully opti-
mal action control, it is necessary to define the states
such that they contain all reward-relevant information,
even if task-irrelevant (Hamid, 2015). But the ques-
tion becomes: how do such states emerge in the brain
or more generally within the decision-making com-
ponent of the agent in the first place (Rigotti et al.,
2010)?
In a recent study of conditional associative learn-
ing, the authors accounted for the effect of temporal
order on accelerating the learning of arbitrary asso-
ciations by devising a model-free RL rule that sets
a probabilistic response choice, reflecting reward ex-
pectations that have been accumulated in the form of
‘action values’ (Hamid et al., 2010). The reinforce-
ment rule modifies these ‘action values’ in propor-
tion to the reward-prediction error that corresponds
to the chosen response. The key feature of the de-
vised model is that ‘action values’ are expanded in
time: some attach to the object of the current trial and
others attach to objects of preceding trials. This pro-
vides them with a cumulative effect in the sense that
the more ‘action values’ favor a particular response,
the more likely this response is chosen. Accordingly,
when successive objects appear in a consistent order,
more than one ‘action value’ will favor the correct
response, which will therefore be chosen more fre-
quently.
Though the model could account qualitatively and
quantitatively to the behavioral observations, it failed
to account for the same associative task in a rever-
sal learning paradigm (Hamid and Braun, 2010). The
main goal of the reversal paradigm was to test the
model’s key assumption, i.e., the reinforcement of
pairings between past stimuli and present response.
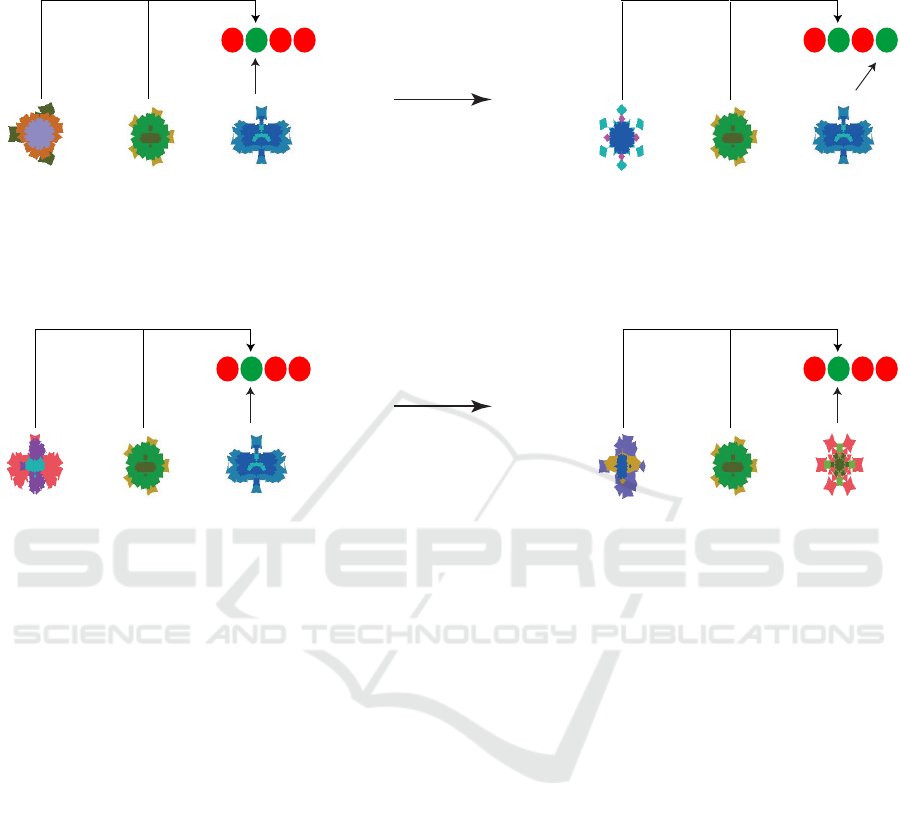
Specifically, let S
t−2
and S
t−1
be the visual stimuli
presented at trials t − 2 and t − 1 in figure 1, respec-
tively. S
t
is the target stimulus at trial t with motor
response R
t
. A: learned response R
t
for the target
stimulus is replaced by response R
0
t
in the second run
of the object sequence (‘action reversal’). Before re-
versal, the model reinforces, in addition to the paring
(S
t
→ R
t
), the pairings (S
t−1
→ R
t
) and (S
t−2
→ R
t
).
After reversal, however, these pairings become in-
valid, as the model has to learn the new response R
0
t
.
Hence, the model’s performance is expected to fall
to chance level. B: target stimulus S
t
is replaced by
stimulus S
0
t
, which has the same response as that of
S
t
. Before reversal, the model reinforces the pairings
(S
t
→ R
t
), (S
t−1
→ R
t
), and (S
t−2
→ R
t
). These pair-
ings remain valid after reversal. Hence, predicted per-
formance remains above chance level.
The cognitive experiment was conducted using
mixed sequences of visual objects as presented in
figure1 with type A, B, and C objects similar to exper-
iment 2 in (Hamid et al., 2010). Specifically, Thirty
two fractal objects were used to create sequences of
72 trials. Eight of these objects were recurring. Four
of the recurring objects formed two consistent pairs
(5, 6) and (7, 8), each of which appeared six times
in the sequence. The ‘predecessor’ objects (5 and 7)
were termed type A and the ‘successor’ objects (6 and
8) type B. Four additional recurring objects were used
to form twelve random pairs (1, 2), (1, 3), (1, 4) . . .,
(4, 1), (4, 2), (4, 3), each appearing once per sequence
(type C). Random pairs and consistent pairs were al-
ternated and separated by 24 one-time objects to form
sequences of 72 trials. Human subjects learned by
trial and error to associate each visual object with one
of four possible motor responses: up, down, left, or
right. Each of the 72 trials long temporal sequences
was presented twice without interruption making up
new sequences of 144 trials long. In the ‘action rever-
sal’ condition, target objects were associated with a
time
tt-1t-2 tt-1t-2
time
tt-1t-2 tt-1t-2
A
B
Action reversal
Object reversal
Figure 1: Predictions for ‘action’ and ‘object’ reversals as suggested by the devised model in (Hamid et al., 2010) (schematic).
The upper row shows the effect of action reversal, whereas the lower row demonstrates that of object reversal. The left column
represents reinforcement before reversal, whereas the right column illustrates decision-making after reversal.
new motor response in the second half of the tempo-
ral sequence. In the ‘object reversal’ condition, target
objects were replaced by other objects in the second
half of the temporal sequence. Figure 2 illustrates be-
havioral and modeling results of the cognitive exper-
iment. We can briefly summarize the results as fol-
lows. First, contrary to the predictions of our rein-
forcement model (Hamid et al., 2010), any type of re-
versal reduced performance to chance level. Second,
the rate of recovery seemed to differ between reversal
types, appearing to be faster for an ‘object reversal’
than for an ‘action reversal’.
4 MODELS IN THE ATTRACTOR
FRAMEWORK
It is widely accepted that reinforcement mechanisms
are optimal only if there is a predefined set of distinct
states that are predictive of reward (Sutton and Barto,
1998; Daw et al., 2005; Doya, 2007; Niv and Mon-
tague, 2008; Dayan and Niv, 2008). Thus, reinforce-
ment models beg the question as to which events or
combinations of events could potentially predict re-
ward in a non-stationary environment. This brings us
to the crucial question of how our brain selects and
creates neural representations for potentially reward-
predicting events. An interesting approach to this
question is the attractor framework, which postulates
that the formation of such representations is based
on temporal statistics of the environment. The key
idea is that mental representations are realized by sta-
ble patterns of reverberating activity, which are stable
steady-states (‘attractors’) in the neural dynamics of
the network (Hopfield, 1982; Amit et al., 1997; Fusi
et al., 2005).
The central tenets of attractor theory are that (i)
the network is plastic, that is, connection strengths de-
velop in an activity-driven, Hebbian manner and that
(ii) associations (e.g., stimulus-response pairings) are
maintained as self-sustained, persistent patterns of ac-
tivity that represent attractors of the neural dynamics.
These tenets predict the formation of associative links
whenever a set of events occurs repeatedly in a con-
sistent temporal order (Griniasty et al., 1993; Amit,
1995; Brunel, 1996).
A recent study of behavioral flexibility in reversal
situations exemplifies the attractor framework (Rig-
otti et al., 2010). The authors of this study postulate
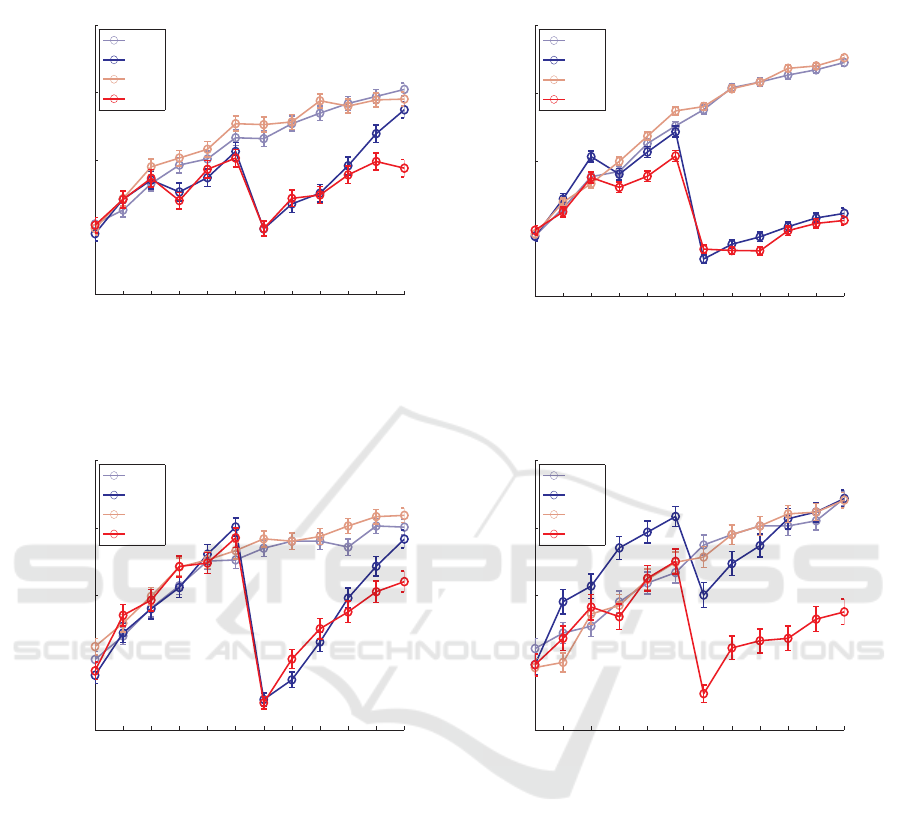
A
1 2 3 4 5 6 7 8 9 10 11 12
0
0.25
0.5
0.75
1
Performance correct
A
B rev
C
C rev
1 2 3 4 5 6 7 8 9 10 11 12
0
0.25
0.5
0.75
1
A
B rev
C
C rev
Object reversal (behavioral results)
1 2 3 4 5 6 7 8 9 10 11 12
0
0.25
0.5
0.75
1
Appearance number
Performance correct
A
B rev
C
C rev
1 2 3 4 5 6 7 8 9 10 11 12
0
0.25
0.5
0.75
1
Appearance number
A
B rev
C
C rev
C
Action reversal (behavioral results) Action reversal (modeling results)
B
D
Object reversal (modeling results)
Figure 2: Behavioral and modeling results for ‘action’ and ‘object’ reversals.
two neural circuits, one for learning reward-relevant
conditional associations (‘associative network’) and
another for observing temporal contingencies (‘con-
text network’). The interaction between these two
networks leads to the formation of distinct neural
representations for different contexts. More specifi-
cally, the associative network comprises two popula-
tions of excitatory neurons, which represent alterna-
tive stimulus-response associations. One population
represents the stimulus-response associations appro-
priate for one context, whereas the other population
codes the appropriate associations for another con-
text. The two excitatory populations compete through
a third, inhibitory population. As long as the reward
predictions of one population are fulfilled, the cur-
rently dominant population will continue to suppress
the other population, and new stimuli will be evalu-
ated in the light of the experience encoded in the dom-
inant population. However, when predicted rewards
fail to materialize, the other population may gain as-
cendancy and behavior may now be governed by the
experience accumulated in another, alternative con-
text.
So how can a representation of context be formed,
which can link all the stimulus-response associa-
tions that are rewarded in a particular context? The
key idea is that different stimulus-response associa-
tions become linked on the basis of temporal statis-
tics. Specifically, as long as one context holds for
much longer than one trial, stimulus-response asso-
ciations within this context follow each other more
frequently than stimulus-response associations in dif-

ferent contexts. This correlational difference can
be translated by Hebbian mechanisms into selective
meta-associations among the stimulus-response asso-
ciations of a given context. Mechanistically, the for-
mation of these meta-associations relies on the tem-
poral overlap between the representation of a current
stimulus-response association and lingering represen-
tations of stimulus-response associations in the recent
past. Further details can be found in (Rigotti et al.,
2010).
5 CONCLUSIONS
Although most attempts to test the attractor frame-
work experimentally have used single-unit recordings
in behaving, non-human primates, we believe that this
framework makes some predictions even at the behav-
ioral level. For example, the neurophysiological find-
ings of (Miyashita, 1988) and (Yakovlev et al., 1998)
imply that reverberative delay activity exists only af-
ter an attractor representation has formed. In the con-
text of (Hamid et al., 2010), this suggests that linger-
ing representations of past events are available only
after these past events have become familiar. On this
basis, we would expect that the presence of consis-
tent predecessor objects becomes influential only af-
ter these objects have become familiar and are recog-
nized. Accordingly, it would be an interesting exten-
sion of the present study to examine whether the fa-
cilitative effect of temporal context is conditional on
correct performance with regard to predecessor ob-
jects.
ACKNOWLEDGEMENTS
We would like to thank the anonymous reviewers for
their helpful comments.
REFERENCES
Amit, D. J. (1995). The Hebbian paradigm reintegrated:
local reverberations as internal representations. Behav.
Brain Sci., 18:617–626.
Amit, D. J., Brunel, N., and Tsodyks, M. V. (1994). Correla-
tions of cortical hebbian reverberations: theory versus
experiment. J. Neurosci., 14:6435–6445.
Amit, D. J., Fusi, S., and Yakovlev, V. (1997). Paradigmatic
working memory (attractor) cell in it cortex. Neural
Comput., 9:1071–1092.
Balleine, B. W., Delgado, M. R., and Hikosaka, O. (2007).
The role of the dorsal striatum in reward and decision-
making. J. Neurosci., 27(31):8161–8165.
Bertsekas, D. P. and Tsitsiklis, J. N. (1996). Neuro-Dynamic
Programming. Athena Scientific.
Braun, J. and Mattia, M. (2010). Attractors and noise: Twin
drivers of decisions and multistability. NeuroImage,
52(3):740 – 751. Computational Models of the Brain.
Brunel, N. (1996). Hebbian learning of context in recurrent
neural networks. Neural Comput., 8:1677–1710.
Castro-Gonz
´
alez,
´
A., Malfaz, M., Gorostiza, J. F., and
Salichs, M. A. (2014). Learning behaviors by an au-
tonomous social robot with motivations. Cybernetics
and Systems, 45(7):568–598.
Davidson, R. J. and Begley, S. (2012). The emotional life of
your brain: How its unique patterns affect the way you
think, feel, and live–and how you can change them.
Hudson Street Press, Penguin Group.
Daw, N., Niv, Y., and Dayan, P. (2005). Uncertainty-based
competition between prefrontal and dorsolateral stri-
atal systems for behavioral control. Nat Neurosci,
8(12):1704–1711.
Dayan, P. (2008). The role of value systems in decision
making. In Engel, C. and Singer, W., editors, Better
than Conscious? Decision Making, the Human Mind,
and Implications for Institutions, pages 50–71. The
MIT Press, Frankfurt, Germany.
Dayan, P. and Abbott, L. F. (2005). Theoretical Neuro-
science: Computational and Mathematical Modeling
of Neural Systems. The MIT Press.
Dayan, P. and Balleine, B. W. (2002). Reward, motivation,
and reinforcement learning. Neuron, 36(2):285–298.
Dayan, P. and Berridge, K. C. (2014). Model-based and
model-free pavlovian reward learning: revaluation, re-
vision, and revelation. Cognitive, Affective, & Behav-
ioral Neuroscience, 14(2):473–492.
Dayan, P. and Niv, Y. (2008). Reinforcement learning: the
good, the bad and the ugly. Curr. Opin. Neurobiol.,
18:185–196.
Dolan, R. J. and Dayan, P. (2013). Goals and habits in the
brain. Neuron, 80(2):312–325.
Doya, K. (2007). Reinforcement learning: Computational
theory and biological mechanisms. HFSP journal,
1(1):30–40.
Friedel, E., Koch, S. P., Wendt, J., Heinz, A., Deserno, L.,
and Schlagenhauf, F. (2015). Devaluation and sequen-
tial decisions: linking goal-directed and model-based
behavior. Habits: plasticity, learning and freedom.
Fusi, S., Drew, P. J., and Abbott, L. F. (2005). Cascade mod-
els of synaptically stored memories. Neuron, 45:599–
611.
Gallistel, C. R. and King, A. P. (2009). Memory and the
Computational Brain. Wiley-Blackwell, West Sussex,
United Kingdom, first edition.
Gershman, S. J. and Daw, N. D. (2017). Reinforcement
learning and episodic memory in humans and animals:
An integrative framework. Annual review of psychol-
ogy, 68:101–128.
Griniasty, M., Tsodyks, M. V., and Amit, D. J. (1993). Con-
version of temporal correlations between stimuli to
spatial correlations between attractors. Neural Com-
put., 5:1–17.

Hamid, O. H. (2014). The role of temporal statistics in
the transfer of experience in context-dependent rein-
forcement learning. In 14th International Conference
on Hybrid Intelligent Systems (HIS), pages 123–128.
IEEE.
Hamid, O. H. (2015). A model-based Markovian context-
dependent reinforcement learning approach for neu-
robiologically plausible transfer of experience. In-
ternational Journal of Hybrid Intelligent Systems,
12(2):119–129.
Hamid, O. H. and Braun, J. (2010). Relative importance of
sensory and motor events in reinforcement learning.
Perception ECVP abstract, 39:48–48.
Hamid, O. H., Wendemuth, A., and Braun, J. (2010).
Temporal context and conditional associative learn-
ing. BMC Neuroscience, 11(45):1–16.
Hopfield, J. J. (1982). Neural networks and physical sys-
tems with emergent collective computational abili-
ties. Proceedings of the national academy of sciences,
79(8):2554–2558.
Kaelbling, L. P., Littman, M. L., and Moore, A. W. (1996).
Reinforcement learning: A survey. Journal of Artifi-
cial Intelligence Research, 4:237–285.
Kamin, L. J. (1969). Predictability, surprise, attention,
and conditioning. In Campbell, B. A. and Church,
R. M., editors, Punishment and Aversive Behavior,
pages 242–259. Appleton-Century-Crofts, New York.
Kremer, E. F. (1978). The Rescorla-Wagner model: losses
in associative strength in compound conditioned stim-
uli. J. Exp. Psychol. Animal Behav. Proc., 4:22–36.
Krigolson, O. E., Hassall, C. D., and Handy, T. C. (2014).
How we learn to make decisions: Rapid propagation
of reinforcement learning prediction errors in humans.
J. Cognitive Neuroscience, 26(3):635–644.
Lewis, F. L. and Vrabie, D. (2009). Reinforcement learning
and adaptive dynamic programming for feedback con-
trol. IEEE Circuits and Systems Magazine, 9(3):32–
50.
Maia, T. V. (2009). Reinforcement learning, conditioning,
and the brain: Successes and challenges. Cogn. Affect.
Behav. Neurosci., 9:343–64.
Mante, V., Sussillo, D., Shenoy, K. V., and Newsome, W. T.
(2013). Context-dependent computation by recurrent
dynamics in prefrontal cortex. Nature, 503(7474):78–
84.
Marsland, S. (2015). Machine learning: an algorithmic
perspective. Chapman & Hall / CRC press.
Mermillod, M., Bugaiska, A., and Bonin, P. (2013). The
stability-plasticity dilemma: Investigating the contin-
uum from catastrophic forgetting to age-limited learn-
ing effects. Frontiers in psychology, 4.
Miyashita, Y. (1988). Neuronal correlate of visual associa-
tive long-term memory in the primate temporal cortex.
Nature, 335:817–820.
Nevo, I. and Erev, I. (2012). On surprise, change, and the
effect of recent outcomes. Frontiers in psychology, 3.
Niv, Y. and Montague, P. R. (2008). Theoretical and empir-
ical studies of learning. In Glimcher, P. W., Camerer,
C., Fehr, E., and Poldrack, R., editors, Neuroeco-
nomics: Decision Making and The Brain, pages 329–
349. NY: Academic Press, New York.
Owen, A. M. (1997). Cognitive planning in humans: neu-
ropsychological, neuroanatomical and neuropharma-
cological perspectives. Prog. Neurobiol., 53(4):431–
450.
Packard, M. G. and Knowlton, B. (2002). Learning and
memory functions of the basal ganglia. Ann. Rev. Neu-
rosci., 25:563–593.
Phelps, E. A., Lempert, K. M., and Sokol-Hessner, P.
(2014). Emotion and decision making: multiple mod-
ulatory neural circuits. Annual Review of Neuro-
science, 37:263–287.
Poldrack, R. A. and Packard, M. G. (2003). Competi-
tion among multiple memory systems: converging ev-
idence from animal and human brain studies. Neu-
ropsychologia, 41(3):245–251.
Rescorla, R. A. and Lolordo, V. M. (1968). Inhibition
of avoidance behavior. J. Comp. Physiol. Psychol.,
59:406–412.
Reynolds, G. S. (1961). Attention in the pigeon. J. Exp.
Anal. Behav., 4:203–208.
Rigotti, M., Rubin, D. B. D., Morrison, S. E., Salzman,
C. D., and Fusi, S. (2010). Attractor concretion as
a mechanism for the formation of context representa-
tions. Neuroimage, 52(3):833–847.
Schultz, W., Dayan, P., and Montague, P. R. (1997). A
neural substrate of prediction and reward. Science,
275(5306):1593–1599.
Shteingart, H., Neiman, T., and Loewenstein, Y. (2013).
The role of first impression in operant learn-
ing. Journal of Experimental Psychology: General,
142(2):476.
Sutton, R. S. and Barto, A. G. (1998). Reinforcement Learn-
ing: An Introduction. The MIT Press, Cambridge,
Massachusetts.
van der Ree, M. and Wiering, M. (2013). Reinforcement
learning in the game of othello: Learning against
a fixed opponent and learning from self-play. In
Adaptive Dynamic Programming And Reinforcement
Learning (ADPRL), 2013 IEEE Symposium on, pages
108–115. IEEE.
van Otterlo, M. and Wiering, M. (2012). Reinforcement
learning and markov decision processes. In Wiering,
M. and van Otterlo, M., editors, Reinforcement Learn-
ing: State of the Art, pages 3–42. Springer, Berlin,
Heidelberg.
Yakovlev, V., Fusi, S., Berman, E., and Zohary, E. (1998).
Inter-trial neuronal activity in inferior temporal cor-
tex: a putative vehicle to generate long-term visual
associations. Nat. Neurosci., 1:310–317.
