
Towards a Scalable Architecture for Flight Data Management
Iv
´
an Garc
´
ıa
1
, Miguel A. Mart
´
ınez-Prieto
2
, An
´
ıbal Breg
´
on
2
, Pedro C.
´
Alvarez
1,3
and Fernando D
´
ıaz
2
1
Instituto de Investigaci
´
on en Matem
´
aticas (IMUVA), Universidad de Valladolid, 47011 Valladolid, Spain
2
Departamento de Inform
´
atica, Universidad de Valladolid, 40005 Segovia, Spain
3
Departamento de Estad
´
ıstica e Investigaci
´
on Operativa, Universidad de Valladolid, 47011 Valladolid, Spain
Keywords:
Data Lake, ADS-B, Big Data, Flight Analytics, Hadoop.
Abstract:
The dramatic growth in the air traffic levels witnessed during the last two decades has increased the interest
for optimizing the Air Traffic Management (ATM) systems. The main objective is being able to cope with the
sustained air traffic growth under safe, economic, efficient and environmental friendly working conditions. The
ADS-B (Automatic Dependent Surveillance - Broadcast) system is part of the new air traffic control systems,
since it allows to substitute the secondary radar with cheaper ground stations that, at the same time, provide
more accurate real-time positioning information. However, this system generates a large volume of data that,
when combined with other flight-related data, such as flight plans or weather reports, faces scalability issues.
This paper introduces an (on-going) Data Lake based architecture which allows the full ADS-B data life-cycle
to be supported in a scalable and cost-effective way using technologies from the Apache Hadoop ecosystem.
1 INTRODUCTION
There is an increasing interest for optimizing air traf-
fic management (ATM) to deal with the fast growing
number of flight movements around the world. For
instance, EUROCONTROL predicts that there will be
11.6 ± 1.2 million flight movements in the European
airspace by 2023, 14% more than in 2016 (Eurocon-
trol, 2017). It is a fact that the airspace is getting more
and more congested, and aviation authorities work to
modernize air traffic control (ATC) systems.
ADS-B (Automatic Dependent Surveillance-
Broadcast) is one of the core technologies of the
new generation of ATC systems and is designed
to improve the safety, capacity, and efficiency of
airspaces. ADS-B enables flight trajectories to
be tracked by using a Global Navigation Satellite
System (GNSS) instead of traditional radar commu-
nications. Although airspace systems are still in the
transition period to incorporate ADS-B technology,
the corresponding equipment will be mandatory for
some aircraft in Europe by the end of the current 2017
(European Commission, 2011). Nevertheless, some
vehicles have been already equipped with ADS-B
transponders and broadcast messages with informa-
tion about the flight trajectory. These time-stamped
messages comprise the 24-bit aircraft hex code, the
flight callsign, geolocation, altitude, or speed.
ADS-B messages are broadcasted twice per sec-
ond (Strohmeier et al., 2015), so large amounts of data
are streamed during the flight. It is obvious that po-
tential scalability issues arise when ATM systems deal
with data from many flights (e.g. all flights within
a particular airspace over a period of time). In this
work, we focus on ATM systems that preserve ADS-
B data for subsequent processing. In this case, large
streams of ADS-B messages must be ingested into the
system and stored for different types of analytics. It
is usual that these analyses demand complementary
data to enhance trajectory information (e.g. flight-
plans, weather, baggage ticketing, etc.). As a result,
huge repositories of heterogeneous data are consoli-
dated and ATM systems must deal with them to make
the corresponding decisions and forecasts. Thus, im-
plementing ATM systems is a particular case of ex-
ploiting Big Data for flight-related analytics.
This paper describes our in-progress experience to
deploy a Big Data platform for ATM. More specifi-
cally, we propose a scalable data-center architecture
which implements all flight data life-cycle, from raw
data acquisition to highly-refined data load into an
end-user system. This class of solutions, commonly
referred to as Data Lake (Terrizzano et al., 2015),
is designed as a centralized repository allowing large
amounts of (structured and/or unstructured) raw data
to be ingested and stored for subsequent transforma-
tion and/or integration purposes. All data manipula-
tions are continuously tracked by a data governance
García, I., Martínez-Prieto, M., Bregón, A., Álvarez, P. and Díaz, F.
Towards a Scalable Architecture for Flight Data Management.
DOI: 10.5220/0006473402630268
In Proceedings of the 6th International Conference on Data Science, Technology and Applications (DATA 2017), pages 263-268
ISBN: 978-989-758-255-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
263
component to ensure high-quality data to be finally
delivered for particular analytics.
Our main contribution in this paper is AIR-
PORTS DL, a data lake oriented architecture which
enables massive of ADS-B data collections to be ef-
ficiently managed and integrated with other flight-
related data. The AIRPORTS DL components are
designed for scalable data management along its full
life-cycle, ensuring high-quality data to be deliv-
ered for flight analytics. AIRPORTS DL is imple-
mented by a Hadoop-based ATM system which ex-
ploits flight-related data to reconstruct gate-to-gate
trajectories and to derive parameters, such as the pre-
dictability or the fuel consumption, that can be later
used to measure and ultimately improve the flight ef-
ficiency. This is our main objective in this project.
The rest of the paper is organized as follows. Sec-
tion 2 delves into more detail about ADS-B and re-
views some use-cases using this technology. Then,
Section 3 provides a detailed description of the Data
Lake architecture proposed in this paper. Finally, Sec-
tion 4 concludes about our current achievements and
explains our next steps in this project.
2 ADS-B
The Automatic Dependent Surveillance (ADS) is a
surveillance technology that allows aircraft to auto-
matically provide, through data link, the data ex-
tracted from the on board navigation and position de-
termination systems (Blythe et al., 2011). ADS has
three main features: i) it is automatic, since it requires
no intervention from any operator (such as the pilot)
or external input to transmit data; ii) it is dependent,
since the data generation depends on the on board air-
craft system (such as the navigation system); and iii)
it provides surveillance data similar to radar data for
both the ground controllers and other aircraft.
ADS provides technologies for broadcasting
(ADS-B) and contract (ADS-C). ADS-B automati-
cally and periodically transmits on board parameters
to all possible receivers within its range of influence
(it can transmit to both a ground station or to other
suitably equipped aircraft within the range). On the
other hand, ADS-C transmits similar information, but
only to on ground Air Traffic Services Units (ATSUs)
and based on an established contract.
We will focus on ADS-B because it provides
foundational technology for the Next Generation Air
Transportation System (NextGen) and the Single Eu-
ropean Sky ATM Research (SESAR) programme
(Richards et al., 2010). Thus, it is a fundamental
building block of the future ATM systems. One of
the main ADS-B advantages is that it provides ATCs
with real-time position information obtained from a
navigation system that is usually more accurate than
that provided by a radar-based system. Increased ac-
curacy means increased safety and increased capacity
of the airspace and the airport. Additionally, ADS-
B works with low altitudes and even at ground level,
which allows its use to monitor aircraft ground ma-
noeuvring, greatly improving the resolution of ASDE
(Airport Surface Detection Equipment).
ADS-B has two components: i) ADS-B Out, that
broadcasts aircraft data, such as the aircraft identifi-
cation, position, altitude, and velocity; and ii) ADS-B
In, that receives useful information for the pilot such
as the traffic information about surrounding aircraft
or information transmitted through the Flight Infor-
mation Service-Broadcast (FIS-B), such as weather
reports or flight information (e.g. temporary flight
restrictions). Deploying ADS-B technology requires
two avionic components, i) a navigation system and a
datalink within the aircraft, and ii) a receiving (typi-
cally ground) station to receive the ADS-B data.
Figure 1: ADS-B operating scheme.
Figure 1 illustrates the ADS-B operating scheme.
Aircraft obtain their position through the built-in sen-
sors along with positioning data from the GNSS satel-
lites, and broadcast such data to any receiver within its
area of coverage. ATC ground stations receive such
data and use it as a replacement for the secondary
radar. Nearby aircraft can also receive such data to
provide situational awareness and allow self separa-
tion. In situations where the aircraft is away from
other aircraft or ground stations (such as uncovered
areas or transatlantic flights), communication satel-
lites (COMM) are used to communicate with the re-
ceivers, thus allowing to have global coverage.
Some research and industrial literature have been
published about ADS-B. The earliest papers, such as
(Hicok and Lee, 1998) and (Zeitlin and Strain, 2002),
describe the system, its components and its imple-
mentation, while more recent works focus on how
DATA 2017 - 6th International Conference on Data Science, Technology and Applications
264

ADS-B infrastructure is currently being deployed and
the open challenges around it (Ali, 2016; Strohmeier
et al., 2014). Collaborative projects like OpenSky
1
demonstrate how a network of ADS-B sensors can
be deployed to capture and share ADS-B data to the
community (Sch
¨
afer et al., 2014). A recent paper
(Strohmeier et al., 2015) reports the experience of im-
plementing OpenSky and emphasize on its data archi-
tecture. The authors report that its original MySQL-
based deployment lacked of scalability and it was re-
placed by a Lambda-oriented architecture (see Sec-
tion 3). Another paper (Boci and Thistlethwaite,
2015) reports a preliminary experience of designing
a data lake for ADS-B data. In contrast to our ap-
proach, this deployment is restricted to a single type
of surveillance data (CAT033) and does not devise
how other data streams can be managed and inte-
grated to obtain more valuable knowledge.
3 AIRPORTS DL
A considerable effort has been carried out during the
past decade in Big Data solutions and scalable data
systems, and terms like Hadoop or NoSQL are two
of the new buzzwords in computational circles. On
the one hand, Hadoop is able to run large-scale batch
computations in a parallelized fashion, at the price
of high latency time. On the other hand, NoSQL
databases are highly scalable solutions, but face some
limitations regarding traditional relational databases.
However, these technologies excel when they are
combined intelligently with other tools (in the Big
Data ecosystem) to build scalable and fault tolerant
systems which are able to deal with variable and com-
plex amounts of data (Marz and Warren, 2015). These
systems are also extensible and allows ad-hoc queries
to be performed over the big data repository.
The Lambda architecture (Marz and Warren,
2015) is the main reference to build such type of
systems. It isolates real-time Big Data management
needs into three layers: (i) the Batch layer is re-
sponsible of preserving the master dataset, and com-
putes batch views transforming (raw) data for partic-
ular end-user purposes; (ii) the Serving layer enables
batch views to be efficiently accessed, and (iii) the
Speed layer assumes real-time data management.
Our current needs must be satisfied by only im-
plementing Batch and Serving layers, because real-
time data management is not currently addressed.
Although different approaches can be adopted, we
choose, as previously explained, the data lake one.
1
https://opensky-network.org/
This topic has received much attention recently
(Miloslavskaya and Tolstoy, 2016; Madera and Lau-
rent, 2016; Hai et al., 2016). A data lake comprises
a set of centralized repositories with no schema-on-
write restrictions. That is, structured and unstructured
data can be effectively stored and only on-read restric-
tions are made. Descriptive metadata must be also
maintained to avoid the data lake to be turned into a
data swamp (Gartner, 2014). The data lake also as-
sumes the traditional ETL (Extract-Transformation-
Load) responsibilities, while preserving all ongoing
data for traceability and analysis purposes. Thus, the
data lake implements storage and data computation
responsibilities of the Batch layer.
Data lakes are usually deployed using Hadoop-
based technology (White, 2015) to ensure cost-
effective storage and processing using the Hadoop
Distributed File System (HDFS) and the MapReduce
computation model, respectively. Regarding the re-
sulting batch views, which comprises highly-curated
data, they must be managed outside of the data lake.
The Serving layer implementation depends on how
data are finally exploited by end-user systems. Al-
though it is common to use data warehouse technol-
ogy, NoSQL databases are increasingly adopted to de-
ploy scalable Serving layer implementations.
AIRPORTS DL
2
combines these foundations to
design an scalable architecture able to deal with volu-
minous ADS-B data streams, and a variety of flight-
related datasets. Figure 2 provides a big picture of
AIRPORTS DL, including the data lake itself, exter-
nal data sources, and the system which implements
the Serving layer. All these elements are described by
following their numeric identifiers; we also mention
the technologies
3
used to implement each one.
1. Data Sources. This element is “the world
around AIRPORTS DL” and includes all external
databases or live services which feed data into the
data lake. We collect information from many ADS-
B providers to get a wide coverage of the air space.
It includes
4
the aforementioned OpenSky community
network, but also comercial providers. Flight plans,
weather information, provided by the Global Fore-
2
AIRPORTS DL relies on the Aviation Data Analytics
Platform Testbed (ADAPT) by Boeing Research and
Technology-Europe (BR&T-E) in Madrid, Spain
3
These technologies are usually available within Hadoop
distributions, so more information about them can be
found in references like (White, 2015).
4
We also feed ADS-B data captured by the Frambuesa
BR&T-E sensor that currently operates at the Madrid-
Barajas Adolfo Su
´
arez Airport (LEMD).
Towards a Scalable Architecture for Flight Data Management
265

Figure 2: AIRPORTS DL Architecture.
cast System
5
, or information about lightning strikes,
flights, airlines, and airports, are also ingested into
the data lake to consolidate a huge data collection.
2. Ingestion. This architectural component is re-
sponsible for importing data from the data sources.
Many data is directly streamed from the providers,
but the component must also get data from avail-
able databases or flat files. We use Apache Flume
to deal with real-time continuous data streams, while
the other ingestion methods are implemented using
Apache Sqoop or Hadoop command utilities. All in-
gested data is preserved by the storage component.
3. Storage. It is the cornerstone of our architecture
and it is designed as an scalable and flexible compo-
nent which allows any type of (big) data to be stored
with no restrictions. This component is implemented
on top of the HDFS (Shvachko et al., 2010) file sys-
tem, ensuring reliable and low cost data persistence
for large files. Our storage component forces data
immutability to ensure data traceability. It means that
the original raw data will never be modified within
the data lake, although it can be copied and progres-
sively refined for different purposes. This component
arranges multiple refinement levels where data at dif-
ferent levels of quality will be preserved. Lower lev-
els are used for transforming data within the scope
of their corresponding data source, while higher lev-
els are used for heterogeneous data integration. This
component allows data to be accessed using HDFS
commands, but also provides a SQL-like interface us-
ing external Hive tables.
4. Transformation. It is the “low-level” data re-
finery of AIRPORTS DL and allows data to be ma-
nipulated and transformed within their original scope
(with no addition of external data). The MapReduce
5
http://www.emc.ncep.noaa.gov/index.php?branch=GFS
computation model (Dean and Ghemawat, 2008) is
the core technology of this component, although other
high-level tools such as Apache Hive or Apache Pig,
are also available to implement and run the corre-
sponding jobs. These jobs interact massively with the
storage component. In practice, transformation is a
complex task which needs many jobs to be effectively
orchestrated (we use Apache Oozie for this purpose).
5. Integration. It is the “high-level” data refinery
and enables heterogeneous data to be integrated and
aligned to satisfy end-user application requirements.
Thus, the transformation and integration components
assume the batch view computations (Lambda Batch
layer). The integration component also runs complex
dataflows implemented using the same technologies.
6. Exploration. It implements an interface to the
storage component that enables on-going data to be
analyzed before being loaded into the Serving layer.
Although it is a dispensable component at architec-
tural level, it is a highly useful tool for data scientists.
The Hadoop command line is used for simple data
exploration, and more advanced data analysis can be
implemented using HiveQL queries.
7. Statistical Analysis. It is a particular exploration
subcomponent which provides a high-level interface
enabling statistical analysis on top of the storage com-
ponent. It is currently implemented using RStudio
6
,
but also makes exhaustive use of Apache Spark and
visualization libraries like Shiny.
8. Load. This is a simple component which moves
batch views from their storage in the data lake to the
Serving Layer. Although Apache Sqoop is a reference
technology at this level, this component is designed
6
https://www.rstudio.com/
DATA 2017 - 6th International Conference on Data Science, Technology and Applications
266

to adjust particular load requirements from the Serv-
ing layer. As current data loading is implemented us-
ing logical Hive tables which play a mediator role be-
tween the storage component and our Serving Layer.
9. Governance. It is a transversal component that
monitors data manipulations within the data lake and
preserves enough information to trace them. Thus, it
is in continuous communication with all components.
We use Apache Atlas to implement data governance
and lineage policies. It can be easily integrated with
the other tools in the data lake, allowing metadata to
be easily managed for each data manipulation.
10. Serving Layer. This component is out of the
data lake and there are no restrictions about its imple-
mentation. Nevertheless, it must be deployed to en-
sure ATM analytics to be effectively obtained on top
of the batch views loaded from the storage compo-
nent. We currently choose Apache HBase since it pro-
vides straightforward integration within the Hadoop
ecosystem, and allows batch views to be queried in
real-time. This deployment is suitable for the current
status of the project, but it could be replaced if new
ATM requirements demand it.
The main ADS-B processing dataflow is as follows:
• Independent Flume agents are deployed, in the
ingestion component, to (continuously) capture
ADS-B data from different providers.
• These corresponding message streams are deliv-
ered to the storage component, which preserves
them in particular repositories.
• A transformation Oozie workflow is daily
launched for ADS-B data cleansing and fact dis-
covering. It includes simple tasks (e.g. discarding
useless messages or aligning field values to sat-
isfy the AIRPORTS data model), but also more
complex ones (e.g. determining trajectories when
different flights use the same callsign or relevant
messages are lost). As a result, messages and tra-
jectories are effectively cleaned in the scope of
each ADS-B provider. This data is made available
for integration, but also for exploration purposes.
• A second Oozie workflow is then launched for in-
tegration. It is performed from two complemen-
tary perspectives. On the one hand, ADS-B mes-
sages are grouped to reduce the existing gaps in
flight trajectories. This issue is due to each data
provider covers particular airspace areas, but does
not capture information outside of them. Thus,
more realistic trajectories are reconstructed after
grouping. On the other hand, we use other repos-
itories in AIRPORTS DL to enhance such trajec-
tories; e.g. ADS-B does not provide information
about departure/arrival airports, but it is inferred
by integrating data from our flight/airport reposi-
tories. All batch views are preserved in the storage
component and then loaded into HBase.
It is just an example, but other dataflows are cur-
rently implemented, and preliminary end-user proto-
types also interact with the Serving layer to obtain rel-
evant analytics for ATM.
4 CONCLUSIONS
The data lake oriented architecture AIRPORTS DL
has been motivated and explained in the current paper.
Although it is an on-going deployment, AIRPORTS
DL has been successfully used to ingest, store, and
process ADS-B messages, and other flight related
data, for almost the last two years. During this period,
an average amount of 20 GB of new flight data (from
the most relevant sources) and 20 GB of weather data
have been collected per day.
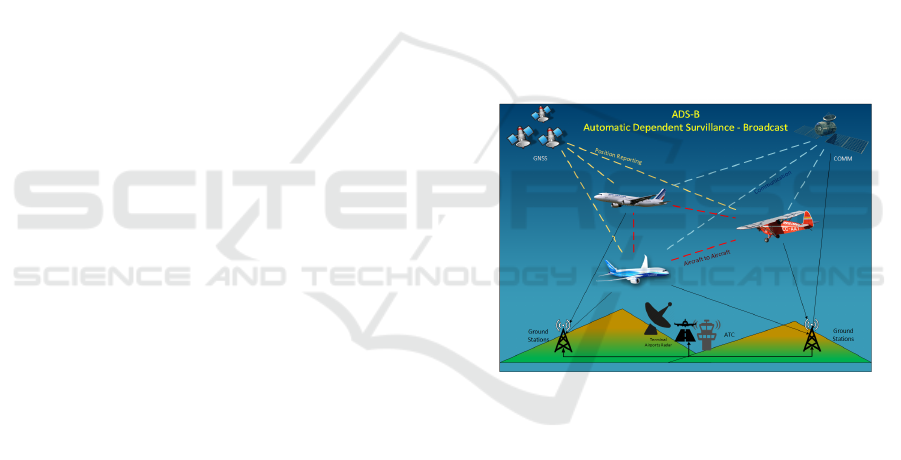
This data has been refined within the data lake to
satisfy particular needs for ATM optimization and fur-
ther decision making. Although these end-used re-
quirements are part of our future work, initial flight-
related pattern analysis and visualization prototypes
have been deployed. For instance, Figure 3 shows a
trajectory density map which enables the main traf-
fic patterns, in the Spanish air space, to be identified
from reconstructed trajectories. Regarding visualiza-
tion, Figure 4 shows a screenshot of our on-going
dashboard. It just allows to visualize different flight
trajectory dimensions (GPS positions, speed or alti-
tude profiles, etc.), but future versions will enable all
batch views (including refined data and/or computed
analytics) to be efficiently accessed.
Our future work also includes the integration of
more data sources (e.g. lightning strikes), and an ex-
haustive benchmarking of all data lake components to
ensure their scalability in a production ATM scenario.
ACKNOWLEDGEMENTS
This work is part of a joint project (AIRPORTS) with
Boeing Research and Technology Europe (BRT&E),
and is funded by CDTI and MINECO (FEDER)
ref. IDI-20150616, CIEN 2015. Authors are
partly funded by MINECO (PGE and FEDER)
projects TIN2013-46238-C4-3-R, TIN2016-78011-
Towards a Scalable Architecture for Flight Data Management
267
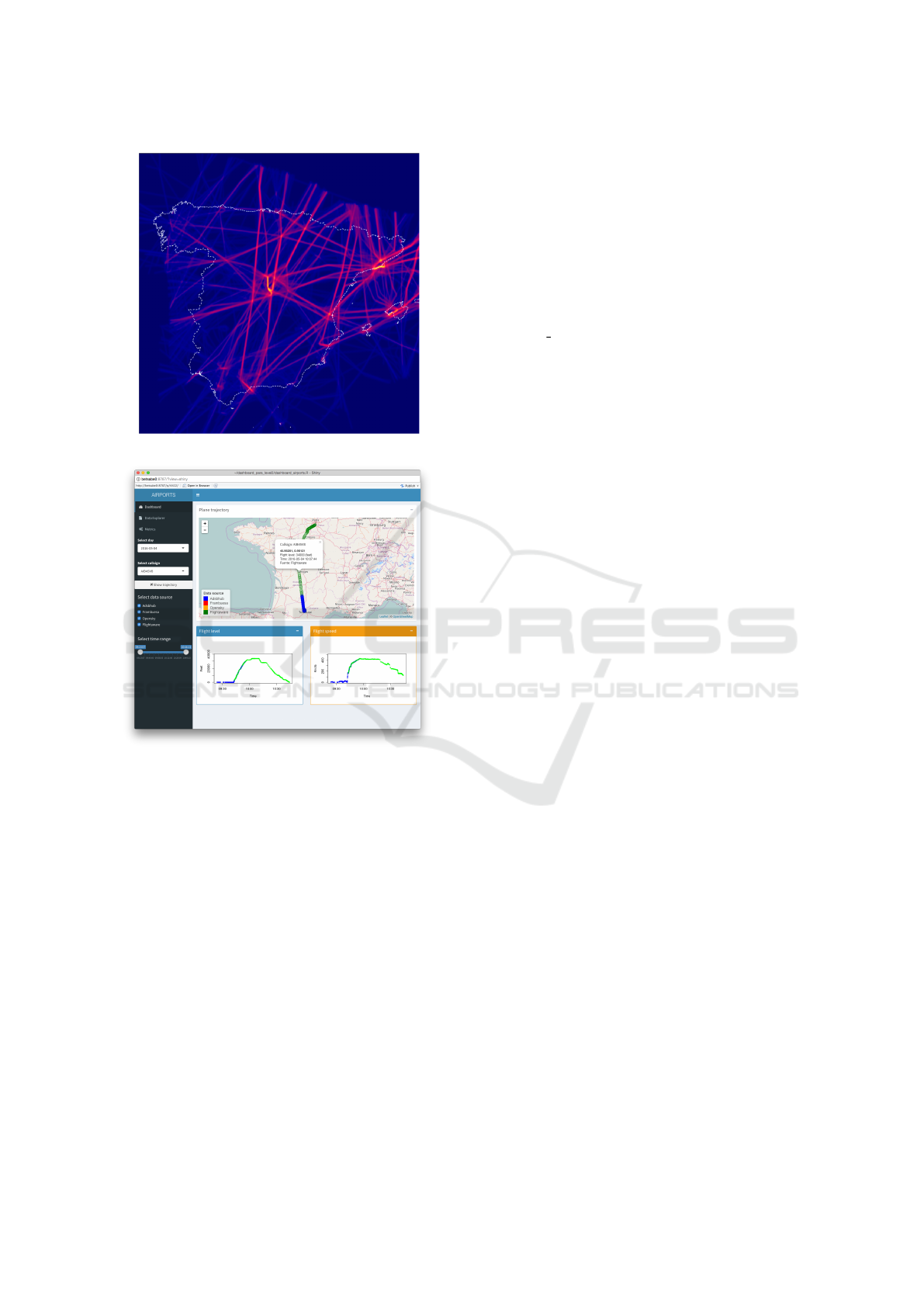
Figure 3: Trajectories density map.
Figure 4: AIRPORTS dashboard.
C4-1-R, MTM2014-56235-C2-1-P and MTM2014-
56235-C2-2, and Consejer
´
ıa de Educaci
´
on, JCyL,
project VA212U13.
REFERENCES
Ali, B. (2016). System Specifications for Developing an
Automatic Dependent Surveillance-Broadcast (ADS-
B) Monitoring System. International Journal of Crit-
ical Infrastructure Protection, 15:40–46.
Blythe, W., Anderson, H., and King, N. (2011). ADS-B Im-
plementation and Operations Guidance Document. In-
ternational Civil Aviation Organization. Asia and Pa-
cific Ocean.
Boci, E. and Thistlethwaite, S. (2015). A Novel Big Data
Architecture in Support of ADS-B Data Analytic. In
Integrated Communication, Navigation and Surveil-
lance Conference, pages C1–1–C1–8.
Dean, J. and Ghemawat, S. (2008). MapReduce: Simplified
Data Processing on Large Clusters. Communications
of ACM, 51(1):107–113.
Eurocontrol (2017). Flight Movements and Service
Units 2017-2023. Technical report, Eurocontrol.
http://www.eurocontrol.int/sites/default/files/content/
documents/official-documents/forecasts/seven-
year-flights-service-units-forecast-2017-2023-
Feb2017.pdf.
European Commission (2011). Commission Implement-
ing Regulation (EU) No 1207/2011. Official Jour-
nal of the European Union. http://data.europa.eu/
eli/reg impl/2011/1207/oj.
Gartner (2014). Gartner Says Beware of the Data Lake Fal-
lacy. http://www.gartner.com/newsroom/id/2809117.
Hai, R., Geisler, S., and Quix, C. (2016). Constance: an
intelligent Data Lake System. In International Con-
ference on Management of Data, pages 2097–2100.
Hicok, D. and Lee, D. (1998). Application of ADS-B for
Airport Surface Surveillance. In 17th Digital Avionics
Systems Conference, volume 2, pages F34/1–F34/8.
Madera, C. and Laurent, A. (2016). The Next Information
Architecture Evolution: the Data Lake Wave. In 8th
International Conference on Management of Digital
EcoSystems, pages 174–180.
Marz, N. and Warren, J. (2015). Big Data: Principles
and Best Practices of Scalable Realtime Data Sys-
tems. Manning Publications Co.
Miloslavskaya, N. and Tolstoy, A. (2016). Application of
Big Data, Fast Data, and Data Lake Concepts to In-
formation Security Issues. In 4th International Con-
ference on Future Internet of Things and Cloud, pages
148–153.
Richards, W., O’Brien, K., and Miller, D. (2010). New Air
Traffic Surveillance Technology. Aero, 2:7–14.
Sch
¨
afer, M., Strohmeier, M., Lenders, V., Martinovic, I.,
and Wilhelm, M. (2014). Bringing up OpenSky: a
Large-Scale ADS-B Sensor Network for Research. In
13th International Symposium on Information Pro-
cessing in Sensor Networks, pages 83–94.
Shvachko, K., Kuang, H., Radia, S., and Chansler, R.
(2010). The Hadoop Distributed File System. In 26th
Symposium on Mass Storage Systems and Technolo-
gies, pages 1–10.
Strohmeier, M., Martinovic, I., Fuchs, M., Sch
¨
afer, M., and
Lenders, V. (2015). OpenSky: A Swiss Army Knife
for Air Traffic Security Research. In 34th Digital
Avionics Systems Conference, pages 4A1–1–4A1–14.
Strohmeier, M., Sch
¨
afer, M., Lenders, V., and Martinovic,
I. (2014). Realities and Challenges of NextGen Air
Traffic Management: the case of ADS-B. IEEE Com-
munications Magazine, 52(5):111–118.
Terrizzano, I., Schwarz, P., Roth, M., and Colino, J. (2015).
Data Wrangling: The Challenging Journey from the
Wild to the Lake. In 7th Biennial Conference on In-
novative Data Systems Research. Paper 2.
White, T. (2015). Hadoop: The Definitive Guide. O’Reilly.
Zeitlin, A. and Strain, R. (2002). Augmenting ADS-B with
Traffic Information Service-Broadcast. In 21st Digital
Avionics Systems Conference, volume 1, pages 3D2–
1–3D2–7.
DATA 2017 - 6th International Conference on Data Science, Technology and Applications
268
