
User Acceptance of Fully Autonomous Public Transport
Christina Pakusch and Paul Bossauer
Department of Management Sciences, Bonn-Rhein-Sieg University, Sankt Augustin, Germany
Keywords: Fully Autonomous Driving, Public Transport, Unattended Train Operation, User Acceptance.
Abstract: The development of fully automated vehicles is becoming more and more present in the social discussion.
The image of fully automated cars is determined by automobile manufacturers and placed in the context of
individual traffic. In contrast to fully autonomous private cars, fully automated public transport is already
operating in some cities and is to be expanded in the future. Autonomous public transport offers great poten-
tial for the development and promotion of sustainable mobility concepts. However, the user acceptance is
important for the enforcement and widespread use of these technical innovations. An online study on the ac-
ceptance of fully automated public transport based on quantitative data of a sample of N = 201 is presented.
The results show a high level of familiarity with the topic and a very high level of overall intention to use
fully automated public transport in the future.
1 INTRODUCTION
Autonomous driving is currently on everyone's lips
– when it comes to the automotive sector. Until now,
this development has mainly been linked to individ-
ual traffic. Driverless public transport plays a minor
role in current research and development. In contrast
to the fully autonomous car, fully autonomous buses
and trains are already on public roads. In the Swiss
town of Sitten autonomous buses have been in oper-
ation since 2016; people can also use autonomous
buses in Lyon (France) and Michigan (USA). The
buses have already traveled more than 50,000 kilo-
meters and have transported 100,000 people. Driver-
less rail-bound trains and trams have been in opera-
tion for a considerably longer time, e.g. railway
shuttles on airport grounds such as the Skyline at
Frankfurt Airport (Germany, since 1994) or the
subway in Paris (France, since 2012), Vancouver
(Canada, since 1986) and Singapore (since 2003).
Public transport is an important part of urban
mobility, as it relieves congestion in cities. But still,
the private car is the most popular and most used
means of transport, and its automation will probably
increase its popularity, to the detriment of many
forms of public transport. Automating the private car
will cause many disadvantages that exist in the non-
automated car to disappear: Users will not have to
control the car themselves, or find a parking space
and can spend their travel time with other activities
such as sleeping, reading, etc. – aspects that, so far,
are competitive advantages of public transport.
These exclusive features of public transport will thus
be eliminated by the automation of the car and there-
fore have initially contra-productive effects for pub-
lic transport. Resultingly, existing public transport
business models are increasingly under pressure and
have to be questioned and rethought. And, in partic-
ular, while it is true that high-performance public
transport systems (high-speed railways) will remain
advantageous over autonomous vehicles in terms of
performance, travel time and reliability, this does not
apply to bus and rail transport outside the main axes
or in medium-sized cities (VDV, 2015).
On the other hand, the automation of public
transport also opens up new opportunities and could
increase competitiveness. The advantages of fully-
autonomous public transport include a lower error
and accident rate, greater availability through re-
duced dwell times and shorter headways, and in-
creased punctuality. Moreover, passenger transport
costs could probably drop and passengers would not
have to suffer from staff strikes. These advantages
would make traveling on train and other forms of
public transport more attractive and lead to an in-
crease in passengers.
The fact that autonomous driving in public
transport has not yet been able to spread further
despite the advantages is primarily a result of the
high investments in a fitout or conversion. Existing
52
Pakusch, C. and Bossauer, P.
User Acceptance of Fully Autonomous Public Transport.
DOI: 10.5220/0006472900520060
In Proceedings of the 14th International Joint Conference on e-Business and Telecommunications (ICETE 2017) - Volume 2: ICE-B, pages 52-60
ISBN: 978-989-758-257-8
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

systems, rails and stations would have to be recon-
structed. This is why new projects and closed sys-
tems are particularly suitable for automation. First
successful conversions of existing systems show that
automation can be achieved more cost-effectively
and more smoothly than previously expected (UITP,
2012).
In addition to the development of existing busi-
ness models, new disruptive models are also being
discussed. Fully autonomous vehicles, such as au-
tonomous taxis or autonomous car sharing, can be
used as public transport. These shared autonomous
vehicles could strengthen public transport by over-
coming the "last mile" and are also an alternative to
owning a private car. Both the available and disrup-
tive business models offer the opportunity to make
traffic more sustainable and to reduce the number of
private cars, which is currently rising and leading to
increased congestion, especially in large cities. Mo-
bility could be realized with fewer and more effi-
ciently operating vehicles, whereby car traffic would
decrease and public transport would increase (VDV,
2015).
The question therefore arises as to whether a
combination of automated driving and public
transport is a flexible and efficient transport solution
that can also make public transport attractive to
former non-customers. An important factor for the
successful implementation of such a concept is the
acceptance of new technologies. Therefore, the pre-
sent study examines whether the use of autonomous
vehicles in public transport is accepted by existing
and potential customers. A survey was conducted on
the attitude towards autonomous public transport.
The survey results are presented and discussed be-
low.
2 FULLY AUTONOMOUS
DRIVING
In general, fully autonomous driving (FAD) is un-
derstood as the autonomous, targeted driving of a
vehicle in real traffic without the driver's interven-
tion (SAE International, 2016). Public transport
includes both local public transport services with
buses and smaller vehicles that are not rail-bound
and local rail-bound services. For both areas, inter-
national standards of full automation have been
defined. According to the J3016 standard (SAE
International, 2016), six levels of automation can be
distinguished for road traffic: no automation (0),
driver assistance (1), partial automation (2), condi-
tional automation (3), high automation (4) and the
last stage of full automation (5).
Similarly, the International Association of Public
Transport (UITP) defines five grades of automation
(UITP, 2012). Level 0 describes conventional on-
sight train operation, as is known from ordinary
roadways. Grade 1 is a combination of manual travel
and train control. The driver controls the journey,
starts and stops the vehicle and operates the doors.
The train operation is not automated, but some pa-
rameters of the trip can be controlled via a train
control. Grade 2 is semi-automatic train operation
(STO). The driver triggers the start and controls the
doors. Otherwise, the journey will be carried out
fully automatically from the start to the stop. If nec-
essary, the driver can immediately take over the
driving control. There are already many Grade 2
automatic train operation systems. Grade 3 is the
driverless train operation (DTO). There is no longer
a driver, but only a train attendant instead of a con-
stant control by a driver. The train attendant controls
the doors and, in the event of an emergency, takes
over control. Grade 4 is unattended train operation
(UTO, or manless train operation MTO) with no
staff on the train and all operations being automated.
The control center can intervene in the train opera-
tion.
In the following, we refer to the fully automated
systems, i.e. to level 5 of the J3016 standard in non-
railbound traffic and to grade 4 of the UITP.
User acceptance is decisive for the success of
technological innovations. According to Davis`
Technology Acceptance Model (TAM), the actual
acceptance of technology is crucial to whether a
person intends to use this technology (Davis, 1989).
The person's intention is, in turn, determined by
perceived usefulness and perceived ease of use of
that technology. Currently, fully-automated vehicles
are a technological innovation that is not yet market-
ready and therefore has not yet or seldom been test-
ed by users. Exceptions are the already operating
examples of fully automated trams and autonomous
buses, which are in test phases. For those buses, user
acceptance can only be determined a priori. An a
priori acceptance analysis determines the user evalu-
ation of a technology before the users could test the
technology (Payre et al., 2014). Naturally, in as-
sessing the new technology, the individual imagina-
tive power of the persons interviewed plays an im-
portant role. However, it seems reasonable to expect
that the intention to use a technology such as the
fully autonomous public transport could be predicted
to some extent by its a priori acceptability.
User Acceptance of Fully Autonomous Public Transport
53

2.1 Private Autonomous Vehicles
In the last years, the research on fully autonomous
vehicles for private individual transportation has
witnessed a boost in work covering topics such as
advanced driver assistance systems, connected cars
or autonomous, self-driving, or driverless vehicles.
Several studies have focused on particular techno-
logical issues. In addition to technical feasibility,
ethical and legal aspects (Riek & Howard, 2014) as
well as user acceptance play an important role. User
acceptance can only be assessed by means of a priori
evaluation, since the potential users can not yet gain
experience with the fully automatic vehicles.
Some studies analyzed the users` a priori ac-
ceptance of autonomous cars. With regard to auton-
omous cars in general, a recent study by Payre et al.
(2014) reveals that a large majority of the population
have a positive attitude and can imagine buying
and/or using autonomous cars. The literature further
shows that acceptance depends on several other
parameters. Studies such as the one by EY (2013)
show that some respondents are afraid that the en-
joyment of driving will decrease as a result of full
automation and they welcome the option of taking
over control whenever they want. Other factors are
age and gender, individual personality, pre-
experience with partly autonomous cars, characteris-
tics of the innovation, the driving environment, and
the manufacturer’s reputation (Nordhoff, 2014;
Rödel et al., 2014). At the same time, other studies
report that people are concerned about self-driving
vehicles (Howard and Dai 2014). These concerns
seem to be cultural, country and gender dependent:
females seem to be more concerned than males
(Schoettle and Sivak, 2014).
Most studies focus on autonomous cars in gen-
eral but neglect ownership as a relevant category. In
particular, the surveys do not differentiate between
ownership and usership models but focus on private
cars only – whether explicitly or implicitly. Only a
few investigations look at self-driving mobility ser-
vices, e.g., self-driving taxis, in detail (e.g., Burns et
al., 2013; Hars, 2015). However, such usership-
oriented business models are becoming increasingly
important, especially for the new generation Y that
tends to use things instead of owning them. A devel-
opment away from ownership towards usership in
the field of mobility could lead to completely new,
disruptive business models (Pakusch et al., 2016).
2.2 Shared Autonomous Vehicles
Some studies have examined shared autonomous
vehicles (SAV) as a form of public private transport
in more detail. These include in particular simula-
tions of SAV fleets, which could be used in medium
to large cities (Burghout et al., 2015; Spieser et al.,
2014). Burns et al. (2013) find that the average SAV
cost per mile is 31 percent less than the average cost
of a privately owned vehicle. They calculate that all
trips could be executed with a fleet of only 15% of
the number of privately owned vehicles. Similar
results are presented by Fagnant and Kockelman
(2014) and Fagnant et al. (2015) who respectively
replace only 3.5% and 1.3% of private cars through
SAV. They conclude that each SAV can replace
around eleven, respectively nine conventional vehi-
cles with a reasonable wait time (one minute or
less). Owczarzak and Żak (2015) develop eight
different concepts of passengers’ public transporta-
tion solutions based on autonomous driving and
compare them with traditional forms of passenger
transportation. Their results show that either the
variant Autonomous Vehicle Only or the variant
Combination of Buses and Autonomous Vehicle
serve best as urban transportation solutions.
These simulations show that new mobility con-
cepts in public transport can be sustainable solutions
and efficient extensions to existing concepts. Ac-
ceptance studies for SAV are rare. Krueger et al.
(2016) recently published a study on the preferences
of potential users. They identified multimodal travel
patterns to be typical characteristics of potential
shared autonomous vehicle users. In addition current
carsharing users are more likely to use shared auton-
omous vehicles with dynamic ride sharing. Results
of their stated choice analysis showed that service
attributes, including the given travel time, waiting
time and travel cost, are significant determinants of
shared autonomous vehicle use and dynamic ride
sharing acceptance. As expected, respondents were
willing to pay more for a shared autonomous vehicle
without dynamic ride sharing than for a shared au-
tonomous vehicle use with dynamic ride sharing.
2.3 Public Transportation
The implementation of unattended train operation
(UTO) systems allows operators to increase the
average speed of vehicles, to optimize the running
time of trains, to shorten headways, and to reduce
dwell time in stations (UITP, 2012). Although auto-
mation in public transport has progressed, the auto-
mobile industry is placing far more effort into de-
ICE-B 2017 - 14th International Conference on e-Business
54

veloping autonomous cars. One reason for this is
that politics is preferably promoting the automotive
sector. In addition, effort and expense are involved
in reconstructing existing public transport routes –
not only for technical but also for financial reasons
(UITP, 2012).
In contrast to private transport, some fully auton-
omous vehicles have been used in public for many
years, especially in rail-bound public transport.
However, few available studies have examined the
acceptance of autonomous public transport. Since
fully-automatic vehicles are already in use in public
transport, some studies have, at least, deduced the
user's acceptance, looking at user numbers for these
systems. For example, the Copenhagen Metro is
operating fully autonomously and records an in-
creasing number of passengers. According to the
Danish Transport Research Institute, a lot of users
from other transportation modes have moved to the
Metro since it was first established in 2002. The
Metro received up to 47% of the bus passengers and
up to 20% of the local train passengers during its
first two years of operation. Up to 13% of the car
drivers and 9% of the bicycle riders also chose to
switch to the Metro in some areas during the same
first two years, 2003 and 2004. The operator, The
Metro Company, regularly surveys users' satisfac-
tion. The latest satisfaction inspections showed that
98% of the users were either “happy” or “very hap-
py” with the Metro. The satisfaction with the Metro
can also be seen in the increasing number of passen-
gers with 3.3 million passengers in 2002 to 40 mil-
lion trips in 2007 (Ansaldo STS, 2016).
As another example, the fully automated Line 1
in Paris (France) carries 725,000 passengers daily.
Line 14 of the Paris Metro, the first wide-gauge
automatic metro in the world, serves 500,000 pas-
sengers daily. The number of passengers grew from
3.5 million in 1998 to 80 million in 2009 (UITP,
2012).
These figures show that the acceptance of rail-
bound, fully automated trains is very high. Since
autonomous buses have only been in test phases,
there are considerably fewer user experiences in this
area that can provide information on the acceptance.
In Sitten (Switzerland) the SmartShuttles “Tourbil-
lon” and “Valère” are on the road. They have trav-
eled more than 1,000 kilometers through more than
800 laps through the old town of Sitten so far, trans-
porting around 7000 passengers. Passengers are
regularly interviewed. Some are somewhat skeptical
before the trip, but after the ride most of them are
very positive. The rating does not depend on the age:
many travelers over 55 years are enthusiastic. The
under-20s use the fully automated shuttle quite natu-
rally as if it were a conventional bus (PostAuto,
2016). But since studies on the acceptance of auton-
omous vehicles have not clearly shown significant
dependencies between age and intention to use such
vehicles (Rödel et al., 2014; Krueger et al., 2016),
we would like to examine the relationship of age and
acceptance of autonomous public transport.
On the basis of the above findings, we formulate
the following hypotheses, which we want to analyze:
H1: Acceptance of fully-automated public
transport depends on age.
H2: Previous experience with autonomous vehi-
cles increases acceptance of fully autonomous
public transport.
H3: The acceptance of fully-automated rail-
bound vehicles is greater than the acceptance of
fully automated non-rail-bound vehicles.
3 METHODOLOGY
To investigate the acceptance of fully autonomous
public transport, we conducted an online survey,
which consisted of three parts. In the first part, the
participants were briefly informed about the topic of
autonomous public transport in an introductory text.
They were made aware of operating examples such
as driverless airport shuttles and driverless trams
(Nuremberg, Germany), in order to remind them that
there are already autonomous public transport ser-
vices and to remind them of possible experiences.
The second part began with questions related to the
use of current means of transport, experiences and
attitudes of the participants towards autonomous
public transport and an assessment of first, the inten-
tion to use automated public transport in general and
second, the willingness to use different autonomous
means of transport. Answers could be given on a
five-point Likert scale. We used open questions to
get insights about the participants` previous experi-
ences with and the attitudes to autonomous means of
transport. Demographic data were collected at the
end of the questionnaire. The questionnaire was
tested in pretests for comprehensibility and revised.
Subsequently, the survey was advertised in Germany
in various social networks and online platforms and
released from 21.11.-19.12.2016. The survey was
completed by 201 participants, 49.3% of whom were
female. The average age of the participants is low at
only 26.2 years, and ranges from 18 to 81 years. The
sample shows a disproportionate percentage of stu-
User Acceptance of Fully Autonomous Public Transport
55

dents, whose choice of transport is strongly deter-
mined by external conditions (financial budget, well-
developed urban transport in cities, and presence of
a student ticket at reasonable costs). This can be
seen in the figures for the most frequently used mean
of transport: 17.4% mainly use private cars, 49.3%
use subways and trams, 21.9% mainly trains, and a
further 8.5% use buses. The sample therefore uses
the public transport system disproportionately highly
in comparison to the general public.
4 RESULTS
4.1 Experience with Autonomous
Driving
With 91%, the majority of the participants in the
survey had already heard of autonomous driving.
37.1% of respondents had already tested at least one
autonomous vehicle. 22.9% of the participants had
experienced an autonomous train, 20.9% an auton-
omous tram or metro, and one respondent (0.5%)
stated having been driven in an autonomous vehicle,
both a bus and a car (multiple mentioning was pos-
sible here). The participants stated in a free text field
that they were transported by autonomous airport
shuttles at the airports in Frankfurt and Dusseldorf,
the autonomous subway in Paris and the autonomous
mobile Dockland Light Railway in London. Re-
spondents who have already had experience with an
autonomous vehicle (n = 76) felt safe (8.5 out of 10
points). The few participants, who did not feel safe
said that they do not fully trust the electronics and
programming of the vehicle and feel insecure as they
cannot estimate what would happen in the event of
operational disturbances or accidents. Also, a user
had bad experiences when he saw people or luggage
being pinched in the automatic closing doors. The
most common reason for a secure feeling during the
autonomous voyage was that the systems used are
controlled, closed and rail-bound traffic systems
where there is neither oncoming traffic nor other
road users (13 entries).
“Because the train cannot deviate from the rail
and the system is well secured.”
“They were simple routes without any other traf-
fic and the routes were very short. I see no reason to
feel unsafe.”
Some other participants consider the technique to
be more reliable than a human driver (13 entries).
“The autonomous train feels just as secure as a
traditional train. The system has passed many tests
and has worked so far without any problems.”
“Because a well-programmed computer is more
reliable than any human being.”
Other reasons were that participants had hardly
noticed that they used an autonomous vehicle, that
the journey was smooth and that they trusted the
advanced technology.
4.2 Intention to Use Fully Autonomous
Transport
Approximately three-quarters of the respondents
(77.6%) can generally imagine using autonomous
public transport regularly in the future. The charac-
teristics gender, age and current main means of
transport have no significant influence on the basic
setting for or against the future use of the autono-
mous public transport (Pearson`s chi-square test p>
0.05). The results also do not indicate a relationship
between age and the assessment of the various au-
tomated means of transport (table 1). Hypothesis 1
therefore cannot be confirmed.
The collected data show that the previous experi-
ence with autonomous transport has an influence on
the willingness to use autonomous transport in the
future. 88% of the interviewees, who had already
experienced autonomous transport, can imagine
using it in the future, while the figure for partici-
pants without previous experience is only 72%.
There is a significant difference in the scores for
experienced (M=0.880, SD=0.327) and non-
experienced (M=0.720, SD= 0.451) participants
(Contingency Coefficient: 0.184; p=0.008). There is
therefore evidence that hypothesis 2 is true. The
previous experience with autonomous driving also
influences the evaluation of different transport
modes. Participants who have already gained experi-
ence with autonomous driving have a higher will-
ingness to use different and new transport modes
than those who have no experiences with autono-
mous transport. An exception is in their evaluation
of the autonomous car (table 1).
The interviewees see advantages, especially in
the innovative and advanced technology, the ex-
pected improved flexibility, and in the higher avail-
ability of the systems, and they expect a reduction in
traffic accidents. On the other hand, the interviewees
see uncertainties because of their lack of experience
and the high degree of reliance on technology. When
the participants were asked which of the autonomous
modes of transport they would most likely use on a
ICE-B 2017 - 14th International Conference on e-Business
56
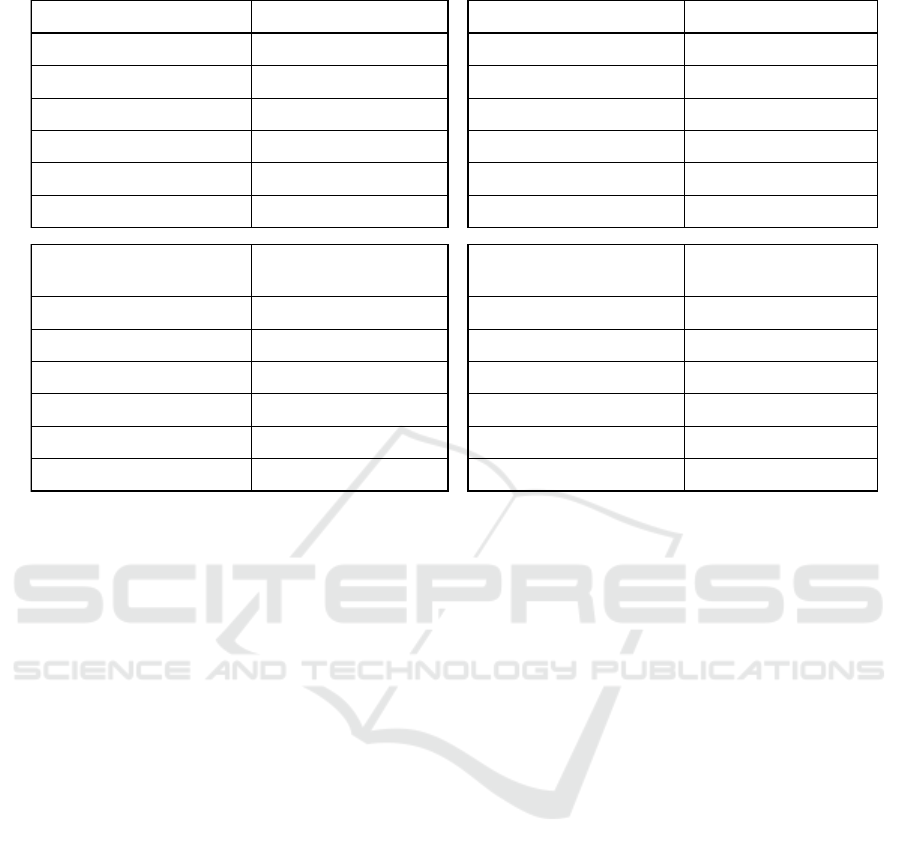
Table 1: Group Statistics and t-test for Equality of Means.
scale from 1 (low) to 5 (high), they preferred the
subway (3.89), the train (3.83), and the tram (3.77)
(overall mean rail-bound vehicles: 3.83) over the
autonomous bus (2.98), the autonomous private car
(2.98), and the autonomous taxi or carsharing (2.64)
(overall mean non rail-bound vehicles: 2.87). The
use of a one-sample t-test shows that the mean value
for rail-bound vehicles differs significantly from the
mean value for non rail-bound vehicles (p=0.000).
The results of this sample support hypothesis 3 that
autonomous rail-bound means of transport are pre-
ferred to autonomous non-rail-bound means of
transport.
We have additionally checked whether the as-
sessments of the individual autonomous modes dif-
fer in the different characteristics of the participants
(see table 1). In comparison to age gender plays an
important role. The male respondents rate the auton-
omous traffic modes systematically higher (M =
3.77, SD = 1.03) than the female participants (M =
2.92, SD = 0.85, p = 0.000). Regardless of the nature
of the means of transport, the willingness of men to
use autonomous transport is significantly higher than
that of women.
Since the use of transport means is usually
marked by routines (Aarts et al., 1997), it can be
assumed that existing preferences in the transport
mode choice will also influence future transport
mode choices. Taking account of the particular
composition of the sample, which, in contrast to the
total population, generally uses public transport as
the main means of transport, a more differentiated
discussion of the result of the preferential autono-
mous modes of transport is required. The review of
this results shows that the preferences of users that
currently use the private car as the main means of
transport are partly different from the preferences of
the participants traveling by public transport. Re-
spondents currently using the private car are less
likely to use an autonomous car (M = 2.56, SD =
1.38) than public transport users (M=3.05, SD=1.50;
p=0.08). The car drivers also gave lower rates for
autonomous taxis or carsharing (M = 2.23, SD =
1.19) than the public transport users (M = 2.74, SD
= 1.37; p=0.04). With regard to the other autono-
mous modes of transport, car drivers do not differ
significantly from public transport users.
5 DISCUSSION
The present study confirms that autonomous driving
has reached a high degree of familiarity among the
population. While some studies found acceptance
rates for fully autonomous cars around 68% (Payre
et al., 2014; Schoettle and Sivak, 2014), the willing-
ness to use autonomous public transport in the future
Age N Mean SD
Mean
Diff.
Sex
0=m; 1=f
N Mean SD
Mean
Diff.
Evaluation FA_Car >= 30.0 29 3.00 1.581 .024 Evaluation FA_Car .0 101 3.38 1.475 .805 ***
< 30.0 170 2.98 1.479 1.0 98 2.57 1.400
Evaluation FA_Bus >= 30.0 29 2.83 1.490 -.178 Evaluation FA_Bus .0 101 3.52 1.331 1.112 ***
< 30.0 169 3.01 1.302 1.0 97 2.41 1.068
Evaluation FA_Train >= 30.0 30 3.60 1.221 -.271 Evaluation FA_Train .0 102 4.2 1.099 .742 ***
< 30.0 171 3.87 1.109 1.0 99 3.45 1.033
Evaluation FA_Metro >= 30.0 29 3.69 1.285 -.228 Evaluation FA_Metro .0 102 4.26 1.033 .775 ***
< 30.0 171 3.92 1.140 1.0 98 3.49 1.160
Evaluation FA_Tram >= 30.0 29 3.69 1.228 -.088 Evaluation FA_Tram .0 102 4.15 1.066 .780 ***
< 30.0 171 3.78 1.152 1.0 98 3.37 1.125
>= 30.0 28 2.57 1.476 -.084 .0 101 3.08 1.426 .885 ***
< 30.0 171 2.65 1.339 1.0 98 2.19 1.118
Main Mean of
Transport
0=PT; 1=Car
N Mean SD
Mean
Diff.
Experience FAD
0=no; 1=yes
N Mean SD
Mean
Diff.
Evaluation FA_Car .0 159 3.05 1.500 .491 † Evaluation FA_Car .0 123 2.90 1.484 -.203
1.0 34 2.56 1.375 1.0 76 3.11 1.502
Evaluation FA_Bus .0 157 3.00 1.340 .257 Evaluation FA_Bus .0 122 2.70 1.290 -.716 ***
1.0 35 2.74 1.221 1.0 76 3.42 1.278
Evaluation FA_Train .0 160 3.80 1.132 -.143 Evaluation FA_Train .0 125 3.66 1.121 -.441 **
1.0 35 3.94 1.056 1.0 76 4.11 1.090
Evaluation FA_Metro .0 159 3.86 1.163 -.116 Evaluation FA_Metro .0 124 3.67 1.167 -.567 ***
1.0 35 3.97 1.098 1.0 76 4.24 1.069
Evaluation FA_Tram .0 159 3.77 1.148 .024 Evaluation FA_Tram .0 124 3.56 1.150 -.549 ***
1.0 35 3.74 1.197 1.0 76 4.11 1.102
.0 159 2.74 1.374 .514 * .0 123 2.50 1.283 -.364 †
1.0 35 2.23 1.190 1.0 76 2.87 1.445
FA = Fully Autonomous; PT = Public Transport; FAD = Fully Autonomous Driving
a) Significance: †: p ≤ .1; *:p ≤ .05; **: p ≤ .01; ***p ≤ .001;
Evaluation FA_Taxi/
Carsharing
Evaluation FA_Taxi/
Carsharing
Evaluation FA_Taxi/
Carsharing
Evaluation FA_Taxi/
Carsharing
User Acceptance of Fully Autonomous Public Transport
57

is slightly higher in our study with 77.6%. In par-
ticular, prior experience with autonomous transport
systems positively affects user acceptance. Only a
few users have had bad experiences with autono-
mous public transport. Our results are consistent
with previous studies that have shown that prior
experience with technology increases the acceptance
of that technology (Burton-Jones and Hubona, 2006;
Taylor and Todd, 1995). This result was evident not
only in the general willingness to use autonomous
public transport regularly, but also in the comparison
of the various fully automated means of transport.
While there is no difference in the overall inten-
tion to use automated public transport between
males and females, the results show distinct differ-
ences in the willingness to use different automated
transportation means. Males are more willing to use
every single one of the automated transportation
means than females. These results confirm findings
of prior acceptance research that has shown females
have higher levels of concerns with self-driving
vehicles than have males (Schoettle and Sivak,
2014). Thus females are less open-minded to the use
of automated transportation means than men, regard-
less of the type of transport.
The fact that the participants seem to prefer rail-
bound means of transport and even buses against
autonomous cars and autonomous carsharing is not
surprising. Since the choice of transportation modes
is usually marked by routines (Aarts et al., 1997), it
can be assumed that existing preferences in the
choice of transportation modes also affect the choice
of future means of transport. The cause of this result
could lie in the car motives locus of control and
sensation seeking. Studies on the adoption of Ad-
vanced Driver Assistance Systems show that locus
of control and sensation seeking are character traits
that influence driving behaviour when using Ad-
vanced Driver Assistance Systems (Rudin-Brown
and Ian Noy, 2002; Stanton and Marsden, 1996).
Locus of control is defined as the extent to which a
person can control the occurrence of an event (Rot-
ter, 1966). Sensation seeking is defined as a charac-
ter trait that is looking for new experiences and
stress stimuli (Zuckerman, 2014). Both properties
are extremely important in the evaluation of fully
automated vehicles, since users give up control over
the vehicle and cannot evoke driving excitement by
themselves. Driving with an autonomous vehicle
can, however, be also an exciting experience for
some people. Todays’ users have no control over
non-autonomous public transport and thus presuma-
bly no locus of control even at current levels. Sensa-
tion seeking is not a motive why users choose public
transport. For the user, there is no big change when
public transport will be automated. Users are pas-
sengers before and after the automation of the public
transport, in both cases the user have no contact to
the driver. This is different in the case of cars, which
users previously controlled themselves, an activity
now done by the car itself. Through the automation
of cars, the user’s role changes from a driver to a
passenger. In this respect, drivers appreciate the
possibility to have the locus of control and sensation
seeking. Both aspects are lost in fully autonomous
vehicles. From the point of view of users, the auto-
mation of cars leads to a substantially greater change
than the automation of public transport. This could
be a reason for the poor rating of autonomous cars
and autonomous carsharing. For an accurate assess-
ment, it would be important to investigate the motifs
locus of control and sensation seeking within the
context of a further study. As the participants were
asked which means of transport they were most
likely to use, and not to which they would convert
completely, the evaluation of the participants might
also be understood to mean that drivers would retain
their previous car and would only use the autono-
mous public transport as a supplement.
In contrast, public transport users rate the auton-
omous public transport not significantly higher. This
result could indicate that public transport users are
also latent car drivers and appreciate locus of control
and sensation seeking on passenger cars and cannot
imagine doing so without a car.
Considering all results, it is important to note
that the study is not representative in terms of age
and the current use of transport; therefore the results
are not directly transferable to the whole population.
In addition, it should be noted that the survey was
carried out in Germany and that the German public
transport system certainly differs from the public
transport of other countries in various aspects. Such
differences may also affect the participants` assess-
ment of future concepts. Nevertheless, the study
provides interesting and important insights into the
groups of young and well-educated individuals, who
will be an important target group in some years,
following the progressive automation of public
transport. In addition, the group of young people
who are still in training is a group whose traffic
behavior has not yet been consolidated and can
therefore be influenced. The study thus makes an
important contribution to the exploration of the user
acceptance of autonomous public transport systems.
ICE-B 2017 - 14th International Conference on e-Business
58

5 CONCLUSION AND
IMPLICATIONS
Modern societies are mobile societies characterized
by highly individualized lifestyles. This mobility is
facilitated by transport systems, with cars being the
main means of transport. In this context, autono-
mous driving is currently one of the major research
and development activities. A major challenge to the
development of these transport systems is their im-
plementation as they involve a great investment for
public transport operators. For new transportation
lines, automation costs have a relatively low com-
parative weight within the overall budget (UITP,
2012). It is true that investments in the expansion of
the public transport system are very high. Existing
examples such as Paris` Line 1 demonstrate that it is
possible to convert high capacity lines without ser-
vice interruption. To minimize impact, conversion
projects should be at the end of the life cycle of the
existing equipment. In addition to technical feasibil-
ity, ethical and legal aspects (Riek and Howard,
2014) as well as user acceptance play important
roles. Recently, the a priori user acceptance of au-
tonomous cars and autonomous taxis has been inves-
tigated in various studies (EY, 2013; Krueger et al.,
2016; Payre et al., 2014). There are hardly any stud-
ies on the acceptance of autonomous public
transport. This paper should close this gap.
Autonomous public transport offers great poten-
tial for the development and promotion of sustaina-
ble mobility concepts. Our study has shown that
autonomous driving is well known among users and
that some users have already experienced autono-
mous traffic systems in the past. It also shows that
the willingness to use the autonomous public
transport in the future is high among the participants.
Approximately three-quarters of the respondents
(77.6%) can imagine driving regularly in the future
with autonomously moving public transport. Previ-
ous experience with autonomous transport has a
positive influence on the acceptance of autonomous
public transport. Policies and research should allow
users access to autonomous public transport even in
test phases so that users can have positive experi-
ences. Particularly at a young age and in phases of
the so-called windows of opportunity, which can
lead to a change in the mobility behavior, users can
thus develop routines and develop long-term sus-
tainable mobility behavior.
ACKNOWLEDGEMENTS
The authors thank Claudia Wirth, Lorena Thiel and
Rebecca Nyßen for helping to develop and distribute
the online survey. The research project ‘CAR-Bits’
(FKZ 01MD16004D) is funded by the German Fed-
eral Ministry for Economic Affairs and Energy.
REFERENCES
Aarts, H., Verplanken, B., & Van Knippenberg, A. (1997).
Habit and information use in travel mode choices. Ac-
ta Psychologica, 96(1), 1–14.
Ansaldo STS (2016). Copenhagen Metro. The Best Metro
in the World 2010. Report. Retrieved March 28, 2017
from http://www.ansaldo-
sts.com/sites/ansaldosts.message-
asp.com/files/imce/copenhagen_metro.pdf.
Burghout, W., Rigole, P. J., & Andreasson, I. (2015).
Impacts of shared autonomous taxis in a metropolitan
area. In Proceedings of the 94th annual meeting of the
Transportation Research Board.
Burns, L. D., Jordan, W. C., & Scarborough, B. A. (2013).
Transforming personal mobility. The Earth Institute.
Retrieved April 6, 2017 from
http://sustainablemobility.ei.columbia.edu/files/2012/1
2/Transforming-Personal-Mobility-Jan-27-20132.pdf.
Burton-Jones, A., & Hubona, G. S. (2006). The mediation
of external variables in the technology acceptance
model. Information & Management, 43(6), 706–717.
Davis, F. D. (1989). Perceived usefulness, perceived ease
of use, and user acceptance of information technology.
MIS Quarterly, 319–340.
EY, (Ernst & Young). (2013). Autonomes Fahren – die
Zukunft des Pkw-Marktes? Retrieved March 26, 2017
from
http://www.ey.com/Publication/vwLUAssets/EY_Stud
ie_-_Autonomes_Fahren_-_die_Zukunft_des_Pkw-
Marktes/$FILE/EY-Autopilot-2013-Praesentation.pdf.
Fagnant, D. J., & Kockelman, K. M. (2014). The travel
and environmental implications of shared autonomous
vehicles, using agent-based model scenarios. Trans-
portation Research Part C: Emerging Technologies,
40, 1–13.
Fagnant, D. J., Kockelman, K. M., & Bansal, P. (2015).
Operations of shared autonomous vehicle Fleet for
Austin, Texas, market. Transportation Research Rec-
ord: Journal of the Transportation Research Board,
(2536), 98–106.
Hars, A. (2015). Flotten selbstfahrender Elektrotaxis –
Eine Szenarioanalyse. In H. Proff (2015).
Entscheidungen beim Übergang in die
Elektromobilität (pp. 615–632). Wiesbaden: Springer
Fachmedien Wiesbaden.
Krueger, R., Rashidi, T. H., & Rose, J. M. (2016). Prefer-
ences for shared autonomous vehicles. Transportation
User Acceptance of Fully Autonomous Public Transport
59

Research Part C: Emerging Technologies, 69, 343–
355.
Nordhoff, S. (2014). Mobility 4.0: Are Consumers Ready
to Adopt Google’s Self-driving Car? Retrieved March
20, 2017 from
http://essay.utwente.nl/65590/1/Nordhoff_BA_Manag
ement%20%26%20Governance-4.pdf.
Owczarzak, Lukasz, & Żak, J. (2015). Design of passen-
ger public transportation solutions based on autono-
mous vehicles and their multiple criteria comparison
with traditional forms of passenger transportation.
Transportation Research Procedia, 10, 472–482.
Pakusch, C., Bossauer, P., Shakoor, M., & Stevens, G.
(2016). Using, Sharing, and Owning Smart Cars - A
Future Scenario Analysis Taking General Socio-
Technical Trends into Account. In Proceedings of the
13th International Joint Conference on e-Business and
Telecommunications (ICETE 2016) (Vol. 2, pp. 19–
30).
Payre, W., Cestac, J., & Delhomme, P. (2014). Intention to
use a fully automated car: Attitudes and a priori ac-
ceptability. Transportation Research Part F: Traffic
Psychology and Behaviour, 27, 252–263.
PostAuto (2016). SmartShuttle-Testbetrieb in Sitten
wieder aufgenommen. Retrieved March 21, 2017 from
https://www.postauto.ch/de/news/smartshuttle-
testbetrieb-sitten-wieder-aufgenommen.
Riek, L. D., & Howard, D. (2014). A code of ethics for the
human-robot interaction profession. Proceedings of
We Robot, 2014.
Rödel, C., Stadler, S., Meschtscherjakov, A., & Tscheligi,
M. (2014). Towards Autonomous Cars: The Effect of
Autonomy Levels on Acceptance and User Experi-
ence. In Proceedings of the 6th International Confer-
ence on Automotive User Interfaces and Interactive
Vehicular Applications (pp. 1–8). ACM.
Rotter, J. B. (1966). Generalized expectancies for internal
versus external control of reinforcement. Psychologi-
cal Monographs: General and Applied, 80(1), 1.
Rudin-Brown, C., & Ian Noy, Y. (2002). Investigation of
behavioral adaptation to lane departure warnings.
Transportation Research Record: Journal of the Trans-
portation Research Board, (1803), 30–37.
SAE International (2016). Automated Driving - Levels of
Driving Automation are Defined in NEW SAE Inter-
national Standard J3016. Retrieved March 21, 2017
from
http://www.sae.org/misc/pdfs/automated_driving.pdf.
Schoettle, B., & Sivak, M. (2014). A survey of public
opinion about autonomous and self-driving vehicles in
the US, the UK, and Australia.
Spieser, K., Treleaven, K., Zhang, R., Frazzoli, E., Mor-
ton, D., & Pavone, M. (2014). Toward a systematic
approach to the design and evaluation of automated
mobility-on-demand systems: A case study in Singa-
pore. In Road Vehicle Automation (pp. 229–245).
Springer.
Stanton, N. A., & Marsden, P. (1996). From fly-by-wire to
drive-by-wire: safety implications of automation in
vehicles. Safety Science, 24(1), 35–49.
Taylor, S., & Todd, P. (1995). Assessing IT usage: The
role of prior experience. MIS Quarterly, 561–570.
UITP, 2012. Press Kit. Metro Automation – Facts and
Figures. Retrieved March 22, 2017 from
http://www.uitp.org/metro-automation-facts-figures-
and-trends.
VDV, 2015. Scenarios for Autonomous Vehicles – Oppor-
tunities and Risks for Transport Companies. Position
Paper November 2015. Retrieved March 22, 2017
from https://www.vdv.de/position-autonomous-
vehicles-vdv-engl.pdfx?forced=true.
Zuckerman, M. (2014). Sensation Seeking (Psychology
Revivals): Beyond the Optimal Level of Arousal. Psy-
chology Press.
ICE-B 2017 - 14th International Conference on e-Business
60
