
An Adaptive Underfloor Heating Control with External Temperature
Compensation
Luca Ferrarini, Soroush Rastegarpour and Anacleto Petretti
Dipartimento di Elettronica, Informazione e Bioingegneria, Politecnico di Milano, P.za L. da Vinci 32, 20133 Milano, Italy
Keywords: Temperature Control, Self-tuning Regulators, Building Energy Efficiency, Model-based Control.
Abstract: The paper describes an interesting combination of auto-tuning and adaptive scheduling approaches to design
and update a feedback/feedforward control of the temperature in buildings. The focus here is on residential
houses endowed with radiant floors, which are intrinsically complex to control due to large inertia and
operational constraints, and on the disturbance rejection of the external temperature. Pure auto-tuning
techniques may fail to converge if the initialization step is not done properly, due to the wide variety of
possible buildings and compensation hard to adapt in closed loop. The proposed approach combines a
classification of the typology of rooms based on physical parameters with auto-tuning, so that in a two-step
closed-loop procedure, the room cluster can be quickly identified, and consequently the feedback controller
and feedforward compensator be tuned. Numerical examples are provided to test the robustness of the
proposed approach.
1 INTRODUCTION
The problem of controlling temperature in buildings
has seen a growing importance due to the pressure
on energy efficiency on the one hand, and on the
need to increase the comfort level on the other hand.
Although temperature is well understood in many
process control applications, in residential buildings
with radiant floors temperature control is still an
issue in almost all applications, due the large inertia
of the pavement itself, to the limitations of the
operating range for inlet temperature, and to the
many disturbances affecting the system.
On the application side, building automation
systems are based on controllers (typically cascaded
PID schemes with saturation and linear/nonlinear
compensators), which are tuned by hand during the
installation phase by some technicians. The results are
that days, weeks or months later these systems must
be retuned, manually, with users’s discomfort in
between. The variety of buildings types, materials,
orientation and so on, makes the classic auto-tuning
techniques ineffective, if proper actions are not taken.
The goal of this paper is to design and test an
algorithm that allows to auto-tune a feedback
controller and a feedforward compensator, in closed
loop, starting from no notion at all of the residential
building with radiant panel under control.
Although the technical literature is dense of
theory and application of adaptive approaches
(Astrom & Wittenmark, 1995), there is a scarce
consideration on adaptive compensator in order to
achieve a high performance in disturbance rejection.
An adaptive control strategy based on RLS method
has been developed for a multizone airhandling unit
in (Nesler, 1986), but since the most contribution of
the collected data from building temperature is due
to heating system, the collected data is not rich in
information to identify the disturbance dynamics in
order to design the proper compensator.
In (Bakker, Brouwer, & Babuska, 2007) an
integration of adaptive control and model predictive
control has been developed, but the focus is on the
occupant behaviour and discomfort aspects and in
(Moon, 2012) an ANN-based (Artificial neural
network) predictive and adaptive thermal control for
disturbance rejection has been proposed. Although
the results of these methods are good, they strongly
depend on the quality of prediction and estimation,
which cannot be guaranteed at all in general, due to
the wide uncertainties and disturbances acting on the
building. Also, the stability, the quality of estimation
and the convergence rate of these methods are
affected by initial states and initial control
configuration.
Ferrarini, L., Rastegarpour, S. and Petretti, A.
An Adaptive Underfloor Heating Control with External Temperature Compensation.
DOI: 10.5220/0006432906290636
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 629-636
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
629
In addition, the adaptive control strategy is used
in (Adolph, Kopmann, Lupulescu, & Muller, 2014),
(Lauenburg & Wollerstrand, 2014) for radiator
heating systems and single room heating system. In
these systems, an operator decision is required to
adapt the control scheme. These methods are usually
named as push-button approach which are not so
user-friendly. In (Tanaskovic, Fagiano, Smith, &
Morari, 2014), (Landau, Lozano, M'saad, & Karimi,
2011), (Kim, Yoon, & Shim, 2008) an adaptive
procedure has been applied on the constrained
MIMO (multi input multi output) system to deal
with the constrains on the input (for example valve
saturation) and output. However, these adaptive
control approaches cannot deal with hard output and
input constraints and wrong initial states and initial
control configuration. And also, the state space
structure of the plant needs to be known. In all these
approaches, the system and initial control scheme
are required to be stable.
Among all, gain
scheduling is one of the most parsimonious method
of choice to rapidly adapt controller tuning to the
prevailing operating conditions in a mildly time
invariant system. (Yang, et al., 2015) (Leith &
Leithead, 2010) (Wilson & Jeff, 2000) (Azwar, et
al., 2014)
The approach proposed in the present paper, on
the contrary is able to update the compensator based
on a recursive cluster selection procedure which can
guarantee the stability and robustness of the system
even with poorly performing initial configuration for
feedback controller and feedforward compensator.
The convergence of this approach has been tested in
all situations defined by technical literature and it
can be shown that by using an appropriate starting
point the convergence rate will increase rapidly.
According to the adaptive approach the PID
controller will be updated to deal with constraints of
input and improve the transient behaviour of the
system. The main novelty of the presented paper is
in the application of a well-known algorithm
(adaptive startegy) for choosing the best cluster
among a wide range of buildings. Moreover, the new
clusterization has been conducted to cover majority
types of buildings ranging from old to new ones.
The rest of the paper is organized as follows. In
Sect. 2 the reference model and its control scheme
are given. Classification of residential buildings is
provided in Sect. 3, while in Sect. 4 closed-loop
auto-tuning techniques are described and tested
inside and outside a cluster. The overall adaptive
scheduling approach is analysed. Finally, some
concluding remarks are given in Sect. 6.
2 MODEL OF THE ROOM AND
ITS CONTROL
A generic building can be seen as a set of zones
(rooms) interconnected through heat exchange.
Rooms can be described with the same model. In a
radiant floor system all the rooms receive a heating
fluid (generally water) at the same temperature. The
fluid runs through pipelines under the pavement.
The returning water from all the rooms is collected
and mixed with hot water from a generator to have
the right water inlet temperature to keep heating the
rooms. The thermal behaviour of a room heated
through radiant panels has been here modelled as a
four-states dynamic linear system. The state
variables of the system are the following:
• T
z
: Average temperature of the air in the
room [°C];
• T
w
: Average temperat. of room walls [°C];
• T
p
: Average temperat. of pavement [°C];
• T
pi
: Average temperature of the pipeline
water [°C].
The inputs of the system are:
• T
oa
: Outside air temperature [°C];
• T
e
: Inlet temperature of pipeline water [°C].
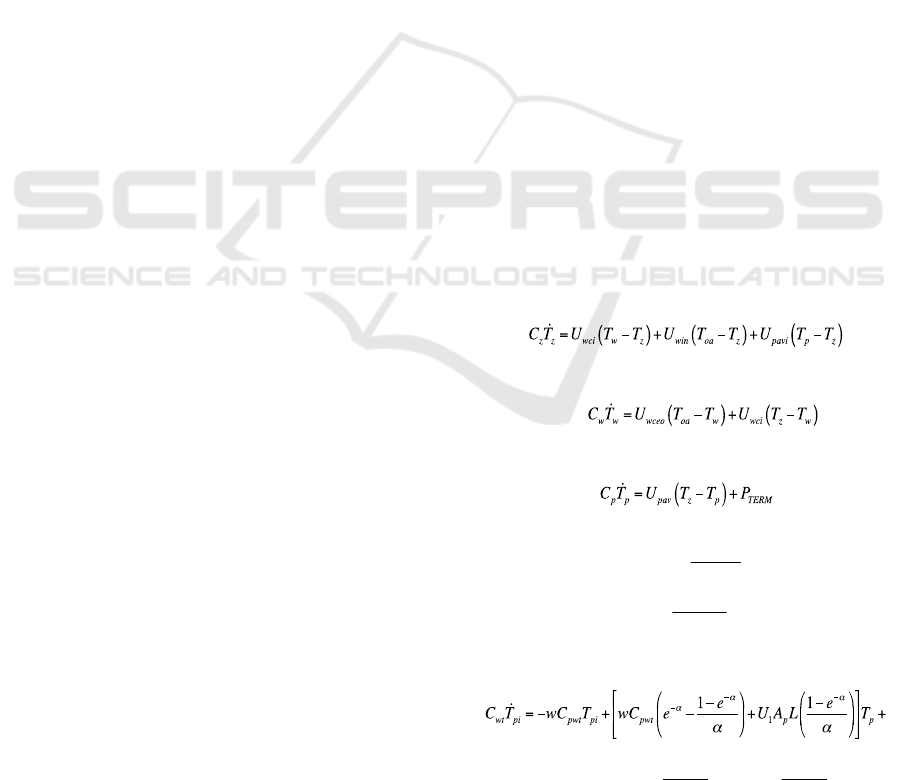
The dynamic equations of the system come from
the energy balance of the room air, walls, pavement
and pipeline. The energy balance equation for the
room air is:
(1)
The energy balance equation for the room walls
is:
(2)
The energy balance equation for the room
pavement is:
(3)
where:
()
pePTERM
TT
e
LAUP −
−
=
α
α
)1(
1
(4)
θρ
α
p
p
ArC
LAU
1
=
(5)
The energy balance equation for the pipeline is:
eppwtpwt
T
e
LAU
e
ewCwC
−
−
−
−−
−−
−
αα
αα
α
11
1
(6)
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
630
The parameters used in equation (1) to (6) are the
following:
• C
z
: Heat capacity of the room air [J/K];
• U
wci
: Internal heat transfer coeff. of walls
[W/K];
• U
win
: Heat transfer coefficient of windows
[W/K];
• U
pav
: Heat transfer coefficient of pavement
[W/K];
• C
w
: Heat capacity of walls [J/K];
• U
wceo
: External heat transfer coeff. of walls
[W/K];
• C
p
: Heat capacity of pavement [J/K];
• A
p
: Pipeline external perimeter [m];
• U
1
: Pipeline thermal conductivity [W/mK];
• A
r
: Pipeline section [m
2
];
• L: Pipeline length [m];
•
θ
: Velocity of water in the pipeline [m/s];
•
ρ
: Water density [Kg/ m
3
];
• C
wt
: Heat capacity of pipeline water [J/K];
• C
pwt
: Water specific heat [J/kgK];
• w: Water mass-flow in the pipeline [kg/s].
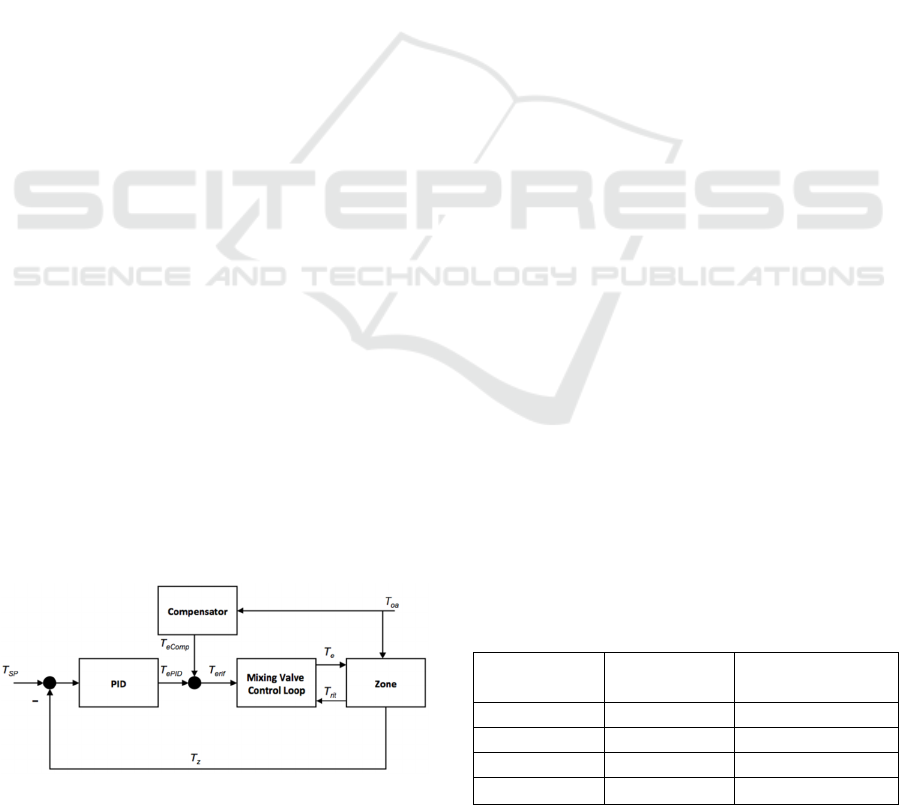
The control scheme here used is shown in
Figure
1
with a PID as feedback controller (FBC) and a
compensator (FFC) of the outside temperature
disturbance (T
oa
). The aim of the control is to keep
the zone temperature equal to a set point chosen by
the user. The control variable is the reference (T
erif
)
of the inlet temperature of the water inside the
pipeline T
e
while the controlled variable is T
z
. The
PID computes T
ePID
based on the error between the
zone set point (T
SP
) and the actual zone temperature
T
z
. The sum of T
ePID
and of the contribution of the
compensator T
eComp
is T
erif
. A second (inner) control
loop, consisting of a PID, controls the opening of the
valve mixing return water from the radiant panels
(T
rit
) and hot water from the generator in order for T
e
to follow T
erif
. Clearly, there are saturations in both
cascaded controllers (each endowed with clamping
anti-windup), as well as ON/OFF valves combined
with a thermostat. All of these have been here
considered.
Figure 1: Temperature control scheme.
3 CLASSIFICATION OF
BUILDINGS
3.1 Clusterization Procedure
The control scheme previously described is the one
widely adopted in practice, with many possible
customization (e.g. in the compensation procedure).
One of the main problems is that the system under
control has a large inertia so that uncertainties and
disturbances can create overshoots and oscillations
which dramatically compromise the comfort.
However, buildings can be of very different types,
due to the wide range of their physical and
geometrical parameters. A purely adaptive approach
to control a generic old or a brand new building is
not effective and shows convergence problems. So,
the proposed approach is based on a suitable
combination of classification and adaptation.
Clusterization of buildings, i.e. the classification
of buildings based on the values of the most relevant
physical parameters, is the way here selected to
reduce the range of all the parameters. This way, a
reference model with contained uncertainty can be
computed for each identified cluster. The
clusterization procedure is based on historical and
statistical data about buildings and on data sheets of
construction materials. At the end of this procedure,
one gets to N
c
clusters, and, after the design stage, to
N
c
feedback controllers and N
c
feedforward
controllers. The main parameters analyzed in the
clusterization procedure are:
• u
pavi
: heat transfer coeff. of the pavement
[W/m
2
K];
• C
pav
: heat capacity of the pavement
[kJ/m
2
K];
• u
wall
: heat transfer coeff. of the walls
[W/m
2
K];
• C
wall
: heat capacity of the walls [kJ/m
2
K];
The initial range of the parameters (referred to
their average value between all the types of
buildings) can be seen in
Table 1
.
Table 1: Parameters average values, and range of
variations before clusterization.
Parameter Average Value Range
u
pavi
20 +340% -65%
C
pav
100 +60% -60%
u
wal
l
0.75 +75% -60%
C
wall
30 +100% -60%
An Adaptive Underfloor Heating Control with External Temperature Compensation
631
After the clusterization procedure an average
value of the parameters is determined for each
cluster and their variation range is reduced to
approximately 1/3 of the initial one.
3.2 Control Scheme Tuning
The reference model of the generic cluster can be
used to tune the PID and the compensator of the
control scheme proposed in Sect. 2.2. Starting from
the 4-state model described in Sect. 2.1 it is possible
to compute two transfer functions:
• G(s): Transfer function from the inlet
temperature T
e
to the temperature of the
room T
z
;
• H(s): Transfer function from the outside
temperature T
oa
to the temperature of the
room T
z;
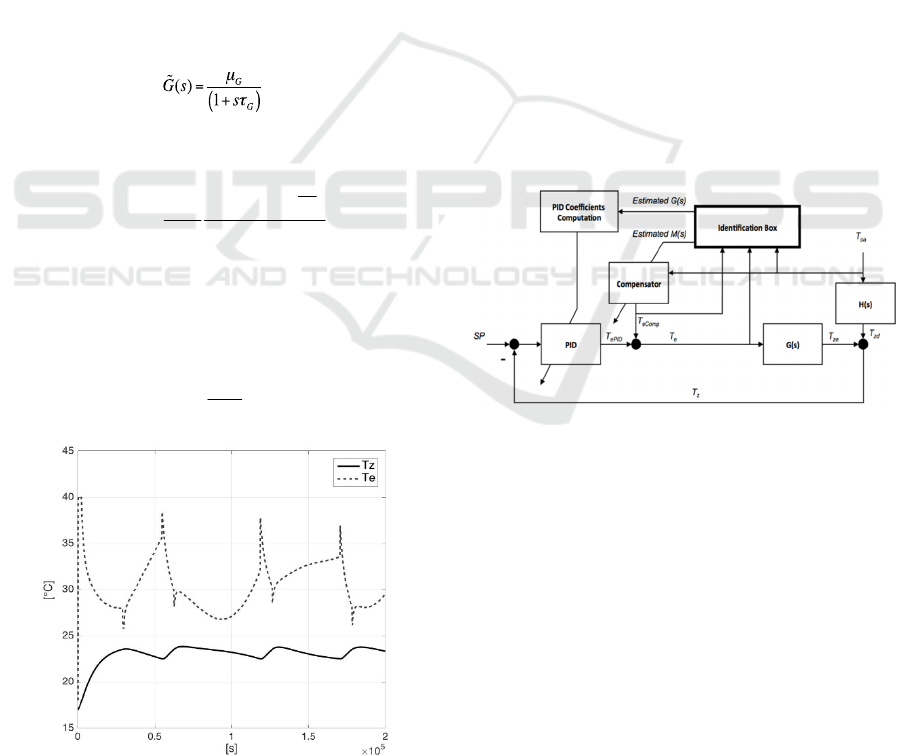
In order to tune the PID controller, a simplified
transfer function can be identified from G(s):
(7)
According to the transfer function in (7), the PID
can be tuned as follows:
()
)1(
11
)(
p
G
G
GG
ss
N
ss
K
sPID
τ
τ
τ
τμ
+
++
=
(8)
Where K and N can be chosen to act on the
velocity of the control loop and τp is a high-
frequency pole for the controller feasibility.
As for the compensator M(s) it can be ideally
computed as:
)(
)(
)(
sG
sH
sM −=
(9)
Figure 2: Example of performances when a control
scheme of a cluster is applied to a building belonging to
another cluster.
For each cluster a low frequency approximation
of M(s) can be found and used in the control scheme
as compensator of the disturbance Toa.
Notice that applying the control scheme of a
cluster to a building of another cluster may result in
unacceptable performance, as shown in Figure 2,
where Te and Tz are the inlet water temperature and
room temperature respectively.
4 CLOSED-LOOP AUTO-TUNING
OF ZONE TEMPERATURE
CONTROL
Adaptive control techniques are able to self-regulate
and update the parameters of a controller in presence
of various uncertainties and disturbances. Model
estimation is a vital part of the adaptation procedure.
The quality of adaptive scheme strongly depends on
the quality of the identified models, which in turn
depends on initial states and initial control
configuration. Apart from that, external disturbances
can cause big troubles in the model identification
procedure. The proposed adaptive strategy is
sketched in Figure 3.
Figure 3: Adaptive strategy block diagram.
The control scheme of Sect. 2.2 is tuned based
on an initial guess of the room cluster and applied to
the real plant.
Input and output data are collected and used in
the identification procedure to estimate the plant and
disturbance dynamics, i.etransfer functions G(s) and
H(s). In order to estimate G(s), which describes just
the effects of Te on Tz, a pure output signal without
any oscillatory behaviour, due to disturbances (Toa),
is required.
In an ideal case, the compensator would
guarantee a good disturbance rejection and therefore
it could be assumed that the measured Tz is not
influenced by Toa but only by TePID. Thanks to the
initial compensator, the output signal (T
z
) will be
pure enough to estimate G(s). However, in the worst
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
632
case in which Tz is not sufficiently rich, since the
most contribution of room temperature is due to the
heating loop so the identified model can be
acceptable for the first iteration. In an iterative
procedure, while the effects of disterbance is
alleviating, the estimated G can converge to the
optimal one, or very close to it. Once the estimation
of G(s) is obtained, the output of H(s) (T
zd
) can be
calculated (T
ze
) based on the output of the G(s)
estimation. The input and output data of the system
for the identification procedure can be organized as
follows:
=
−=
T
y
TT
u
z
p
eCompe
p
sG :)(
−=
=
TT
y
T
u
zez
d
oa
d
sH :)(
A method based on state variable filter (SVF)
(Young & Jakeman, 1980), (Ljung, 2009) is used to
identify G(s) and H(s). Based on these identified
models, the compensator and the PID controller are
updated.
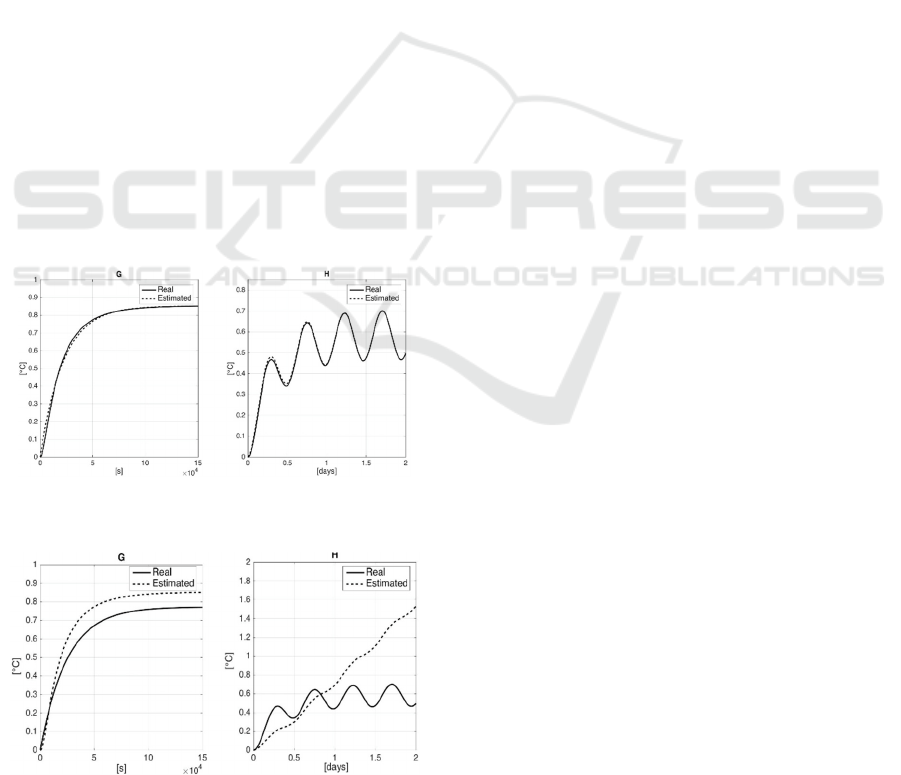
In order to evaluate how the estimation of G(s)
and in consequence H(s) are influenced by this
initial guess, the adaptive control strategy is applied
to the mentioned plant with different initial guess of
the cluster (i.e. parameters of the PID and of the
compensator) If the initial control scheme is chosen
from a cluster whose physical characteristics are far
away from those of the building under control, the
estimation of the real plant is inaccurate and,
Figure 4: Estimation of G(s) and H(s) with a good
initialization.
Figure 5: Estimation of G(s) and H(s) with a bad
initialization.
consequently, the identified model for disturbance
dynamics is completely wrong in the sense of time
and frequency properties Figure 5. Both the
estimation of G(s) and H(s) are accurate when
starting from good initialization
Figure
4
. Therefore, to choose the right cluster for
the building (i.e. the control scheme) is fundamental.
5 OVERALL ADAPTIVE
SCHEDULING APPROACH
5.1 Main Motivation and Possible Solution
A robustness problem in the classical auto-tuning
method arises when the estimated plant (G(s)) is
inaccurate. Because of the strong sensibility of
disturbance dynamic estimation (H(s)) to the
accuracy of estimated plant, classical self-tuning
approaches for updating the compensator are
unreliable. On the contrary, an adaptive scheduling
method (based on clustering approach) is a well-
known robust approach to adapt the compensator in
a proper way to guarantee the robustness, stability
and convergence behaviour of the system even in
presence of lack of accuracy in plant estimation.
According to the analysis conducted in Sect. 3
and 4, a hybrid adaptive approach has been
conceived. Basically, first we identify the cluster,
then we apply the control parameters of the
identified cluster and re-tune only the FBC using the
auto-tuning scheme presented in Section 4,
maintaining the FFC of the selected cluster. The
advantages of this hybrid procedure are: 1) as a first
step, it is easier to identify the most accurate cluster
to identify G(s) or H(s); 2) when estimating G(s),
some parts of disturbance dynamics are eliminated
before the reaction of compensator; 3) the estimation
of H(s) is avoided, thanks to the cluster
compensator; 4) the identified cluster is used “only”
for a correct initialization of the auto-tuning
procedure. Thus, this approach improves the
robustness and quality of estimated model of the real
plant which in turn leads to better re-tune the
compensator. The procedure to identify the cluster
should be iterative, since the variety of the buildings
is very high, so potentially the estimation should be
refined in a step-wise manner: first we get data from
the closed-loop system with a tentative controller,
then, after the plant estimation, better FBC/FFC
controllers are obtained and applied, so we can
restart, obtaining cleaner data. The closest cluster
can be found throughout the iterative cluster
An Adaptive Underfloor Heating Control with External Temperature Compensation
633
selection procedure. The convergence of the
mentioned iterative opertaion can be proved due to
the cluster selection criterion which is the time
constant and DC gain of the estimated linear
function. On one hand, the thermal characteristics
(thermal capacity and transmitance of the walls and
pavement) of the working building are represented
by the time constant and the DC gain of estimated
transfer function. On the other hand, the
clusterization has been done due to difference of
thermal capacity and transmitance of the walls and
pavement. It can consequantly be claimed that the
cluster selection procedure converges to the closest
cluster thanks to the accurate clusterization of the
possible biuildings. The convergence of the
aforesaid operation is also proved by different
analysis even with a randomely chosen cluster
Figure 7. In the case that the iterative procedure can
not converge to the specific cluster, i.e. switching
among 2 or 3 clusters, the average compensatore
will apply to the system and the proper PID
controller will retuned based on the estimated linear
model.
As for the initialization of the adaptive
scheduling approach, the control scheme is chosen
initially as the “average” PID/compensator. This is a
standard PID designed for the “average” building,
ranging from very old buildings to most recent ones
belonging to the Nc clusters. As it will be shown
later, the identification procedure of the cluster is
affected by the initial control scheme (i.e. a FBC and
a FFC), but only for the convergence rate.
Data collection procedure and consequently a
preliminary estimation of the real plant are done
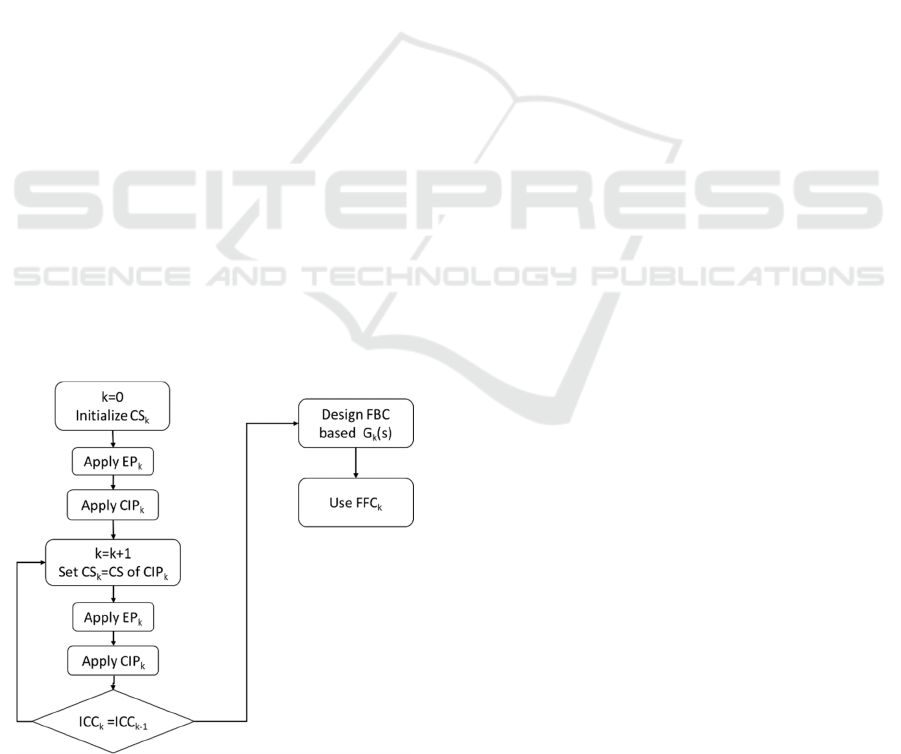
Figure 6: Adaptive scheduling algorithm flowchart.
based on the initial control scheme during a time
period Test (Test =2 days in the following analysis
and figures). In this step, the closest cluster (ICC,
Identified Closest Cluster) is identified iteratively
(through the CIP procedure). Once the cluster has
been selected, the final FBC is tuned based on the
estimation of the plant performed in the last
iteration, while the compensator is selected directly
from the identified cluster.
The mentioned adaptive scheduling algorithm is
summarized in the flowchart of Figure 6. The term
CS stands for control scheme, based on a FBC and a
FFC. The two acronyms EP and CIP stand for the
following two procedures.
Estimation procedure (EPk):
1- Apply the control scheme CS
k
2- Run the closed loop system and collect data
for time interval T
est
.
3- Estimate G(s).
Cluster Identification procedure (CIPk):
1- Select two clusters with closest dominant
time constant based on estimation
procedure (EP).
2- Select among those two the one with
closest gain.
3- Name this cluster as ICC
k
.
5.2 Simulation Results and
Comparison
A wide cross-validation between adaptive
scheduling and clustering approach and initial
control scheme (CS
0
) has been performed to
illustrate the beneficial effects of proposed
adaptation procedure on disturbance rejection,
stability and robustness of the system and also the
convergence to the most appropriate FFC and FBC
in an iterative procedure.
In the first test a modern building endowed with
an initial control scheme, randomly chosen among
the N
c
clusters, has been considered in order to
evaluate the robustness of the proposed approach.
As shown in
Figure 7
, this scheme CS
0
generates
unacceptable oscillatory behaviour and slow
transient response. Nevertheless, after the proposed
adaptation procedure, the behaviour of the building
temperature is completely smooth and the
disturbance rejection is achieved perfectly. The FFC
converges to the most appropriate one after 4
iterations (each iteration takes the same time interval
T
est
) and FBC regulates correctly.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
634
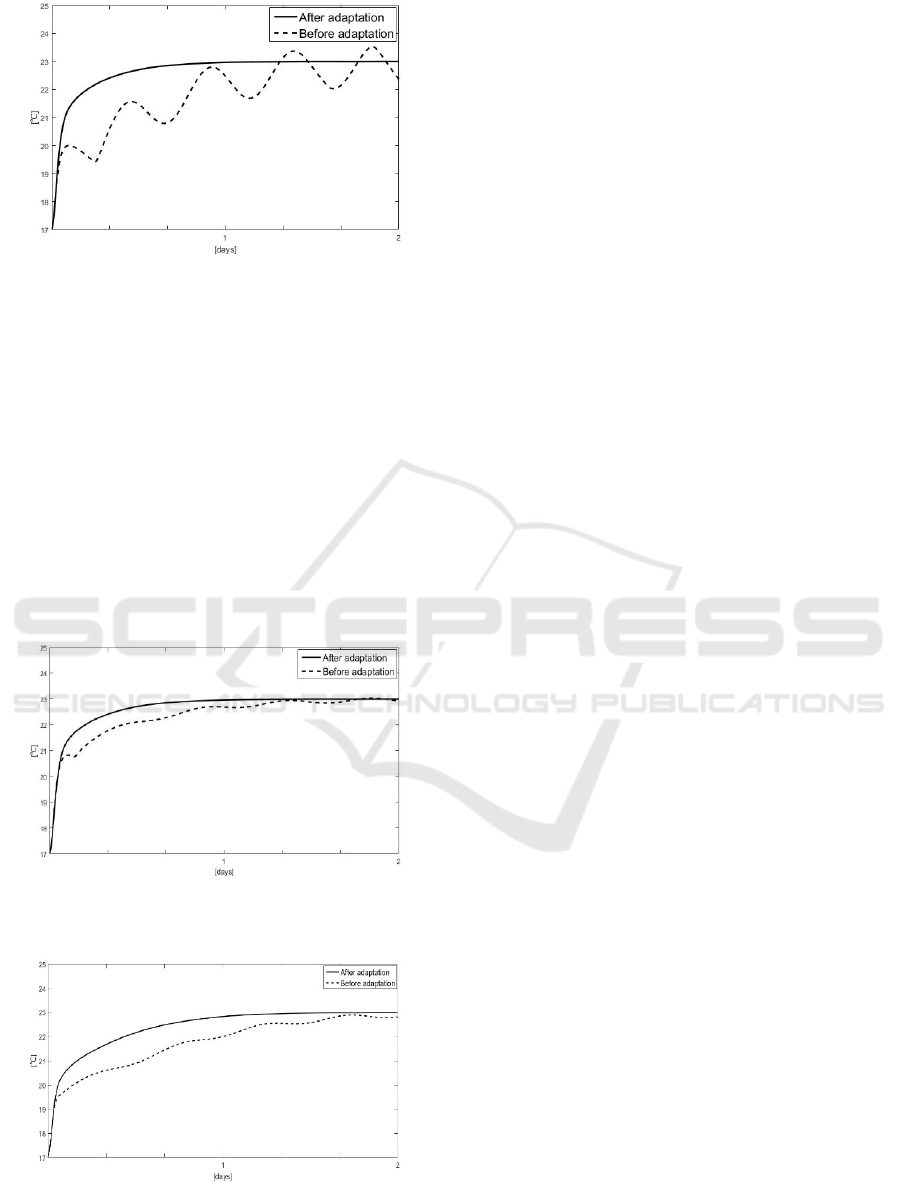
Figure 7: Temperature behaviour of a modern building
with a randomly chosen CS0.
In the second test, the same modern building is
considered, but this time the CS
0
has been initialized
based on the “average” building of the N
c
clusters.
This initial control scheme is more reliable than the
previous one. In this case, the same result of the
previous test is achieved
Figure 8, but the
convergence rate is two times faster: in this second
test, the adaptation procedure just took 2 iterations.
In the third test, a very old building is chosen.
Once again the CS
0
is initialized based on the
average building of the clusters. The adaptive
scheduling approach converges to the best working
cluster in 2 iterations as shown in
Figure 9.
Figure 8: Temperature behaviour of a modern building
with CS0 based on “average” building.
Figure 9: Temperature behaviour of a very old building
with CS0 based on “average” building.
Many other similar testing have been performed.
So, it can be claimed that, by using an interpolation
of all the clusters (ranging from very old buildings to
most recent ones) as the initial control scheme for
the adaptive scheduling approach, the minimum
iterations number for converging to the best working
cluster is guaranteed.
6 CONCLUSIONS
The paper addresses the general problem of
automatic tuning of temperature regulators for
buildings with radiant floors. In particular, the
problem is here considered for residential buildings
of any type (from a flat in a multi-residential
building to an isolated villa), of any construction
period (from ‘60s up to 2015), and of any energy
labels (classes A to D), which gives rise to a wide
variety of physical parameters. Also, the external
temperature rejection problem is considered. The
basic result here proposed is an adaptive procedure
based on a suitable combination of auto-tuning and
adaptive scheduling based on a clusterization of
buildings. Blind tests show that it proves to be
robust to parametric uncertainties always converging
to the expected control schemes, for any kind of the
above-mentioned rooms. Different sampling time
and estimation horizons have also been tested, with
similar performance. Models have also been tested
in a laboratory facility, where room with heated
pavement is build within another bigger room
playing the role of external ambient, and the first
results are encouraging. Formal proof of
convergence will be considered as a further result.
Although the external temperature is one of the
most effective disturbances on the building
temperature, there are many other disturbances
affecting the system, such as internal gains, due to
occupant behaviour and thermo-electrical
equipment, and solar radiation. The rejection of such
disturbances will be considered in the future
extension of the adaptive algorithm here illustrated.
In addition, future directions include tackling the
problem of measurement noise in the zone
temperature, inlet temperature and the disturbance
signals.
REFERENCES
Adolph, M., Kopmann, N., Lupulescu, B. & Muller, D.,
2014. Adaptive Control Strategies for Single Room
An Adaptive Underfloor Heating Control with External Temperature Compensation
635

Heating. Energy and Buildings, volume 68, P. 771–
778.
Astrom, K. & Wittenmark, B., 1995. Adaptive control
(2nd ed.). s.l.:Addison-Wesley..
Azwar, M. Y., Mohd, A. H. & Ahmad, K. A. W., 2014.
Modeling, optimization, and control of microbial
electrolysis cells in a fed-batch reactor for production
of renewable biohydrogen gas. International Journal
Energy Research.
Bakker, L. G., Brouwer, A. & Babuska, R., 2007.
Integrated Predictive Adaptive Control Of Heating,
Cooling, Ventilation, Daylighting And Electrical
Lighting In Buildings. International Journal of Solar
Energy, 21(2-3), pp. 203-217.
Kim, J., Yoon, T. & Shim, H., 2008. Switching adaptive
output feedback model predictive control for a class of
input-constrained linear plants. IET Control Theory &
Applications, pp. 573 - 582.
Landau, I., Lozano, R., M'saad, M. & Karimi, A., 2011.
Adaptive Control, Algorithms, Analysis and
Applications. New York: Springer.
Lauenburg, P. & Wollerstrand, J., 2014. Adaptive control
of radiator systems for a lowest possible distric
theating return temperature. Energy and Buildings,
Volume 72, p. 132–140.
Leith, D. & Leithead, W., 2010. Survey of gain-scheduling
analysis and design. International Journal of Control,
pp. 1001-1025.
Ljung, L., 2009. Experiments with Identification of
Continuous Time Models, Linköping, Sweden:
Linköpings universitet & 15th IFAC Symposium on
System Identification,Saint-Malo, France.
Moon, J. w., 2012. Performance of ANN-based predictive
and adaptive thermal-control methods for disturbances
in and around residential buildings. The International
Journal of Building Science and its Applications,
Volume 48, pp. 15-26.
Nesler, C. G., 1986. Adaptive control of thermal processes
in buildings. IEEE Control Systems Magazine, 6(4),
pp. 9-13.
Tanaskovic, M., Fagiano, L., Smith, R. & Morari, M.,
2014. Adaptive receding horizon control for
constrained MIMO systems. Automatica, Volume 50,
p. 3019–3029.
Wilson, R. & Jeff, S., 2000. Research on gain scheduling.
Automatica, 36(10), p. 1401–142.
Yang, L., Xiaojun, B., Fen, W. & H, L., 2015. A Gain-
Scheduling Control Approach for Takagi–Sugeno
Fuzzy Systems Based on Linear Parameter-Varying
Control Theory. Journal of Dynamic Systems,
Measurement, and Control, p. 9.
Young, P. & Jakeman, A., 1980. Refined instrumental
variable methods of time-series analysis: Part III,
extensions. International Journal of Control, Volume
31, p. 741–764.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
636
