
REHLib: New Optimal Implementation of Reconfigurable Energy
Harvesting Multiprocessor Systems
Wiem Housseyni
1
, Olfa Mosbahi
1
and Mohamed Khalgui
1,2
1
National Institute of Applied Sciences and Technology (INSAT), University of Carthage, Tunis 1080, Tunisia
2
School of Electro-Mechanical Engineering, Xidian University, Xi’an 710071, China
Keywords:
Real-time Scheduling, Distributed Architecture, Energy Harvesting, Dynamic Reconfiguration, RTOS,
Posix-based Implementation.
Abstract:
The designs of reconfigurable embedded real-time energy harvesting multiprocessor systems are evolving for
higher energy efficiency, high-performance and flexible computing. Energy management has long been a lim-
iting factor in real-time embedded systems. A reconfiguration is defined as a dynamic operation that offers
to the system the capability to adjust and adapt its behavior i.e., scheduling policy, power consumption, or
to modify the applicative functions i.e., add-remove-update software tasks, according to environment and the
fluctuating behavior of renewable source. This paper provides an implementation of reconfigurable multi-
processor energy harvesting systems. The objective of this work is to develop software components for the
design of real-time operating systems. We propose a novel adaptive approach in order to address the limi-
tations in energy harvesting systems. We develop a reconfigurable real-time energy harvesting system based
on POSIX implementation. The proposed approach is assessed from two aspects, energy management and
real-time scheduling. Experimental results show the effectiveness of the proposed approach compared with
state-of-the-art techniques.
1 INTRODUCTION
The uses of multiprocessor embedded real-time sys-
tems have grown tremendously in recent years in va-
riety of applications from our daily lives to industry
production. This is due to the fact that multiprocessor
systems fulfill the growing demand of scalable, high-
performance, and highly reliable systems. Multipro-
cessor systems are widely used in applications involv-
ing wireless sensor networks, air traffic control, and
battle field surveillance. However, their usefulness is
severely limited by the battery capacity. The battery
lifetime is a major challenge in the design of embed-
ded systems particularly hard-real-time systems. In
recent years, energy scavenging or harvesting tech-
nology from renewable sources such as photovoltaic
cells, and piezoelectric vibrations emerges as new al-
ternative to ensure sustainable autonomy and perpet-
ual function of the system. By the same token, the lit-
erature has revealed a substantial interest in schedul-
ing research for energy aware and power management
scheduling for real-time systems. Still, there is suffi-
cient scope for research, although uni-processor real-
time scheduling for energy harvesting based systems
is well studied. On the other hand, scheduling tech-
niques for the reconfigurable multiprocessor energy
harvesting systems are not mature enough to either be
applicable or optimal as much as currently available
uni-processor real-time scheduling techniques. Re-
configurable systems are solutions to providing both
higher energy efficiency, and high-performance and
flexibility. From the literature we can drive different
definitions of a reconfigurable system. The authors
of (Grichi et al., 2015) define a reconfiguration of a
distributed system as any addition/ removal/update of
one/more software-hardware elements. In this work,
we define a reconfiguration as a dynamic operation
that offers to the system the capability to adjust and
adapt its behavior i.e., scheduling policy, power con-
sumption, according to environment and the fluctuat-
ing behavior of renewable source, or to modify the ap-
plicative functions i.e., add-remove-update software
tasks. Almost of embedded systems are real-time
constrained. A real-time system involves a set of tasks
where each task performs a computational activity ac-
cording to deadline constraints. The main purpose of
a real-time system is to produce not only the required
results but also within strict time constraints. The
346
Housseyni, W., Mosbahi, O. and Khalgui, M.
REHLib: New Optimal Implementation of Reconfigurable Energy Harvesting Multiprocessor Systems.
DOI: 10.5220/0006432203460354
In Proceedings of the 12th International Conference on Software Technologies (ICSOFT 2017), pages 346-354
ISBN: 978-989-758-262-2
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

control of real-time systems is ensured by a software
called Real-Time Operating System (RTOS). The ob-
jective of the RTOS is to manage and control the as-
signment of system tasks in order to meet real-time
requirements. Over the last years, several real-time
operating systems have been ported RTLinux (Bara-
banov and Yodaiken, 1996), RTAI (Mantegazza et al.,
2000), Xenomai (Gerum, 2004), and LITMUSRT
(Calandrino et al., 2006). However, none of these ap-
proaches provide support for real-time reconfigurable
multiprocessor energy harvesting based applications
yet. New challenges raised by real-time reconfig-
urable embedded energy harvesting multiprocessors
systems (REEHMSs) for RTOS in terms of recon-
figurability, scheduling, and energy harvesting man-
agement. Based on these motivations, we investigate
in this paper the challenges and viability of imple-
menting a reconfigurable real-time energy harvesting
scheduler in OS. There are many programming lan-
guages designed for the development of real-time sys-
tems such as POSIX (Portable Operating System In-
terface) (Mueller et al., 1993). POSIX standard pro-
motes portability of applications across different op-
erating system platforms. The purpose of this work
is to address the scheduling issue of real-time tasks
in REEHMSs. For this aim, the main contributions of
this paper is summarized as follows: i) A new Energy-
Based-Utilization task partitioning heuristic is pro-
posed for the initial task assignment executed offline,
ii) A new dynamic adjustment algorithm is proposed
for performing system reconfiguration in case of in-
feasible execution, iii) A new framework REHLib:
Reconfigurable Energy Harvesting Library for the de-
sign of real-time operating systems is developed to
address reconfigurability and energy harvesting lim-
itation in RTOS with POSIX-based implementation.
As far as we know, this is the first work that attempt
to implement the real-time scheduling for reconfig-
urable energy harvesting multiprocessor systems in
RTOS. The remaining of this paper is structured as
follows. Section 2 summarizes a state of the art rela-
tive first to real-time scheduling in energy harvesting
based embedded systems, then to reconfigurable em-
bedded systems. The system architecture is given in
Section 3. Section 4 details the proposed approach.
Section 5 presents the implementation of the proposed
approach and its integration in Linux kernel. Perfor-
mance evaluation is studied in Section 6. Section 7
concludes the paper and gives some new directions of
work.
2 STATE OF THE ART
In this section, we present a state of the art dealing
first with real-time scheduling in energy harvesting
systems, then with reconfigurable embedded systems.
2.1 Real-time Scheduling in Energy
Harvesting Based Systems
Uni-processor real-time scheduling for energy har-
vesting based systems is well studied (Allavena and
Moss
´
e, 2001), (Chetto, 2014). In (Ghor et al., 2011)
the authors proposed the EDeg (Earliest Deadline
with energy guarantee) algorithm. According to EDeg
algorithm, the processor executes tasks as soon as
possible according to the EDF rule, as long as the sys-
tem can perform without energy failure. The authors
define the notion of slack energy which is an exten-
sion of the notion of slack time. Slack energy permits
to quantify the energy consumed by future jobs and to
prevent them from violating their deadlines because
of energy shortage. Then, as soon as future energy
failure is detected, the system is suspended as long as
possible depending on slack time or until the energy
storage unit is full. In (Wei et al., 2010), the authors
proposed an adaptive energy efficient task allocation
scheme for a multiprocessor system-on-a-chip (SoC)
in real-time energy harvesting systems. Recently, in
(Lu and Qiu, 2011), the authors propose a novel tech-
nique of task partitioning for Energy Harvesting Real-
Time Embedded System (EH-RTES) multicore based
on DVFS-capability. No work from the state of the art
deals with unpredictable behavior of reconfigurable
computing systems.
2.2 Reconfigurable Real-time
Embedded System
The real-time scheduling for reconfigurable embed-
ded systems is well addressed in (Wang et al., 2016),
(Wang et al., 2015). In (Wang et al., 2010), a study
for low power dynamic reconfigurations of real-time
embedded systems is proposed. An agent-based ar-
chitecture is proposed where an intelligent software
agent is developed to check each dynamic reconfigu-
ration scenario and to suggest for users useful techni-
cal solutions that minimize the energy consumption.
It proposes to modify periods, reduce execution times
of tasks or remove some of them. Taken by the same
scope, the authors in (Khemaissia et al., 2014) pro-
pose to develop an intermediate layer which presents
the middleware that will be in interaction with the
kernel Linux. The proposed middleware manages
REHLib: New Optimal Implementation of Reconfigurable Energy Harvesting Multiprocessor Systems
347
the addition/removal/update of the periodic and ape-
riodic tasks with precedence constraints and sharing
resources. We remind that all related works do not
model the reconfiguration in real-time multiprocessor
energy harvesting systems. Recently, in our previ-
ous work (Housseyni et al., 2016) (Housseyni et al.,
2015) we interested to dynamic software reconfigura-
tion in distributed embedded energy harvesting sys-
tems. We proposed dynamic run-time reconfiguration
scenarios, i.e, task parameters modification, migra-
tion, degradation of quality of services, and task re-
moval, in accordance with user requirements in reac-
tion to unpredictable events from the environment or
hardware failures. The main purpose is to guarantee
a feasible system where real-time and energy harvest-
ing requirements are respected, with the consideration
of system performance optimization. While, in the
current work we propose dynamic software and hard-
ware reconfiguration. To the best of our knowledge,
this is the first work that deals with dynamic software
and hardware reconfiguration for real-time scheduling
in a reconfigurable multiprocessor embedded system
with energy harvesting assumptions.
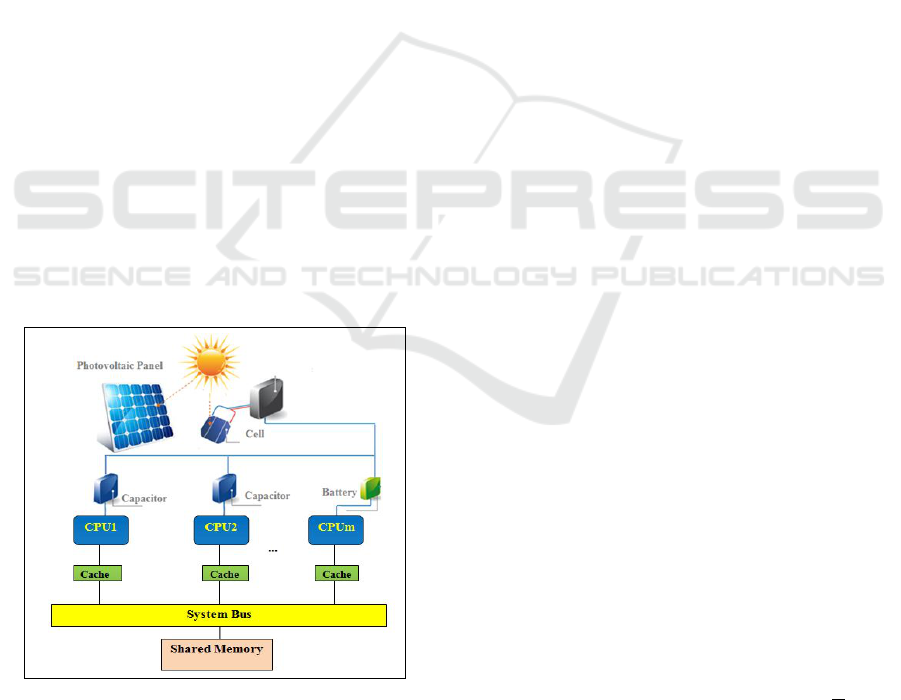
3 SYSTEM FORMALIZATION
We present in this section a formal description of
the considered reconfigurable energy harvesting mul-
tiprocessor system. The investigated system model is
depicted in Figure 1.
Figure 1: System model.
3.1 Hardware Architecture
We consider a symmetric multiprocessor (SMP) ar-
chitecture. The considered SMP configuration Sys,
is constructed of m identical CPU Sys: {P
1
, .., P
m
},
where preemption and migration of tasks are autho-
rized. The CPUs lie close to each other and are phys-
ically connected over a common high-speed bus. The
processors share a global memory module (shared
memory) and peripheral devices through a common
I/O bus interface. Each processor P
j
, j ∈ {1, .., m} is
connected to a rechargeable energy storage with lim-
ited capacity B
j
. We assume that the energy storage
is supplied by a renewable energy source such as the
photovoltaic energy.
3.2 Energy Considerations
The battery B
j
, j ∈ {1, .., m}, is characterized by a ca-
pacity C
j
. We assume hereafter that the energy stor-
age can be completely depleted to as little as zero.
The energy available in the storage B
j
at time t is de-
noted by E
B
j
(t). We also assume that each energy
storage can be charged up to its capacity. Let P
h
j
(t)
be the instantaneous power of harvesting energy of
the battery associated to processor P
j
. The harvested
energy in the interval time [t
1
, t
2
] in the battery asso-
ciated to the processor P
j
, denoted E
h
j
(t
1
, t
2
) is calcu-
lated as follows:
E
h
j
(t
1
,t
2
) =
Z
t
2
t
1
P
h
j
(t)dt (1)
We suppose that the incoming power received by the
storage unit associated to processor P
j
is a constant in
time ( ∀ t, P
h
j
(t) = P
h
j
).
3.3 Real-time Tasks Model
We assume that Sys performs a set of n periodic inde-
pendent task set. In this work, a task can be a thread
or a process. Each task τ
i
is characterized by: i) Pe-
riod T
i
, ii) Worst case execution time (WCET) C
i
in
conformance with the classical task model of Liu and
Layland (Liu and Layland, 1973), iii) Worst case en-
ergy consumption (WCEC) En
i
expressed in Joules,
and iv) A degree of criticality dc
i
that defines its ap-
plicative importance. The degree of criticality is de-
fined as the functional and operational importance of
a task. The designer of the system defines (manually)
the degree of criticality of each task in the system. We
consider that tasks have implicit deadlines, i.e. dead-
lines are equal to periods. In addition we define task
CPU utilization calculated as follows: U
τ
i
=
C
i
T
i
ICSOFT 2017 - 12th International Conference on Software Technologies
348

4 RECONFIGURABLE ENERGY
HARVESTING AWARE
SCHEDULER
The task scheduling problem on a REEHMS con-
strained by both real-time and energy constraints with
uncertainty on the energy availability is known to
be NP-complete and considered as one of the most
challenging problems in parallel computing (Michael
and David, 1979). To address these challenges,
we propose a dynamic scheduling framework for
REEHMSs.
4.1 Static Task Assignment Heuristic
In this section, the energy-based utilization (EBU)
scheduling algorithm is described. Energy-based uti-
lization achieves proportional energy sharing among
tasks by managing energy as the first-class resource
and scheduling tasks based on their energy consump-
tion. In this paper, the energy is correlated to the
period by introducing the concept of energy utiliza-
tion. The energy utilization, U
e
i
, is defined as the
worst case energy consumption WCEC of task τ
i
E
n
i
divided by its deadline D
i
.
U
e
i
=
En
i
D
i
(2)
The EBU selects initially the task with lowest energy
utilization to be scheduled on a processor in Sys
according to the Best Fit heuristic. Therefore, Sys is
sorted in decreasing order of the energy availability
in the storage, E
B
j
(t). The task τ
i
is assigned to pro-
cessor P
j
if the task set ψ
j
is schedulable according to
EDF, and the storage B
j
has the least residual energy.
Ideally, the residual energy in the storage should
be zero. Each task set ψ
j
assigned to processor P
j
should satisfy the following constraints:
Real-time Constraints:
n
∑
i=1
C
i
T
i
≤ 1 (3)
Energy Harvesting Constraints:
n
∑
i=1
U
e
i
≤ P
h
j
(4)
4.2 Real-time Energy Harvesting
Multiprocessor Systems
Reconfiguration
Reconfigurable computing systems greatly have the
ability to respond to environmental changes includ-
ing hardware/software defects, resource changes, and
non-continual feature usage. Such as, in this paper
the flexibility and adaptability is modeled by the ad-
dition of new tasks to the system in order to dynam-
ically adapt the system’s behavior to outside stimuli
in accordance with user requirements. Thereafter, the
occurrence of such unpredictable external events may
involves the system toward an infeasible state, where
the real-time and energy constraints may be violated,
task’s deadlines missed. Such situation involves an
adequate reconfiguration scenario so as to cope with
online modification of the processing load. We pro-
pose a reconfiguration procedure based on software
hardware reconfiguration to re-establish the feasibil-
ity in the whole system. Figure 2 explains the pro-
posed reconfiguration procedure step-by-step.
Reconfiguration
Add task τ
i
to Processor
P
j
Feasibility analysis
Feasible ?
OK
Case 1:
Energy Starvation
Case 2:
violation of Real-Time
constraints
Case 3:
violation of Real-Time
and Energy constraints
KO
Reconfiguration
scenario1
Reconfiguration
scenario 2
Reconfiguration
scenario 3
Implement solution
Figure 2: Activity diagram of the reconfiguration strategy.
4.2.1 Energy-based Migration
We identify three cases of failure:
Case 1: The real-time constraints are satisfied but the
energy constraints are violated.
Case 2: The energy constraints are satisfied but the
real-time constraints are violated.
Case 3: Both the real-time and the energy constraints
are violated.
In order to deal with the three forms of failure, we
propose a hardware/software reconfiguration scenario
to each case in the purpose to re-establish the system
feasibility. The basic idea is to define a lower utiliza-
tion threshold for processors and keep the total uti-
lization of the CPU by all the tasks allocated to the
processor between the lower utilization threshold and
the schedulability utilization U
x
equals to 1 defined by
REHLib: New Optimal Implementation of Reconfigurable Energy Harvesting Multiprocessor Systems
349

EDF.
Reconfiguration scenario 1: We propose to compare
the CPU utilization to a predefined threshold. If the
CPU utilization of the faulty processor falls below the
lower threshold, the task set has to be migrated from
this processor and the processor has to be switched to
the idle mode for recharging the storage unit.
Reconfiguration scenario 2: If the CPU utilization
exceeds 1, some tasks have to be migrated from the
faulty processor to reduce the utilization factor.
Reconfiguration scenario 3: The task set has to be
migrated from the processor which has to be switched
to the idle mode for recharging the storage unit.
The Energy-Based Migration algorithm is carried out
in two steps: i) At the first step: selection of tasks to
be migrated, ii) At the second step: processor selec-
tion where migrated tasks will be affected.
4.2.2 Tasks Selection Policy
The proposed policy selects the minimum number of
tasks needed to migrate from a faulty processor to the
lower CPU utilization below the schedulability uti-
lization U
x
threshold 1. The algorithm sorts the list of
tasks affected to the faulty processor in the decreasing
order of the CPU utilization. Then, it selects a task
which satisfies two conditions. First, the task should
have the utilization higher than the difference between
the processor utilization and the schedulability uti-
lization U
x
equals to 1. Second, the task provides
when migrated, the minimum difference between the
schedulability utilization U
x
and the new utilization
across the values provided by all the tasks. If there
is no such a task, the algorithm selects the task with
the highest utilization. The algorithm stops when the
new processor utilization is below the schedulability
utilization U
x
.
5 APPROACH
IMPLEMENTATION WITH
POSIX AND INTEGRATION
INTO A LINUX BASED SYSTEM
We propose to develop a REHLIB: Reconfig-
urable Energy Harvesting Library based on POSIX-
Implementation in the purpose to enhance the real-
time services of existing versions of Linux, such
as RTLinux (Masmano et al., 2009) or Linux/RTAI
(Mantegazza et al., 2000). The REHLIB is com-
posed of two components real-time scheduling with
energy harvesting requirements, and the reconfigura-
tion management components. Figure 3 depicts the
Figure 3: REHLIB Framework.
architecture of the proposed framework REHLIB.
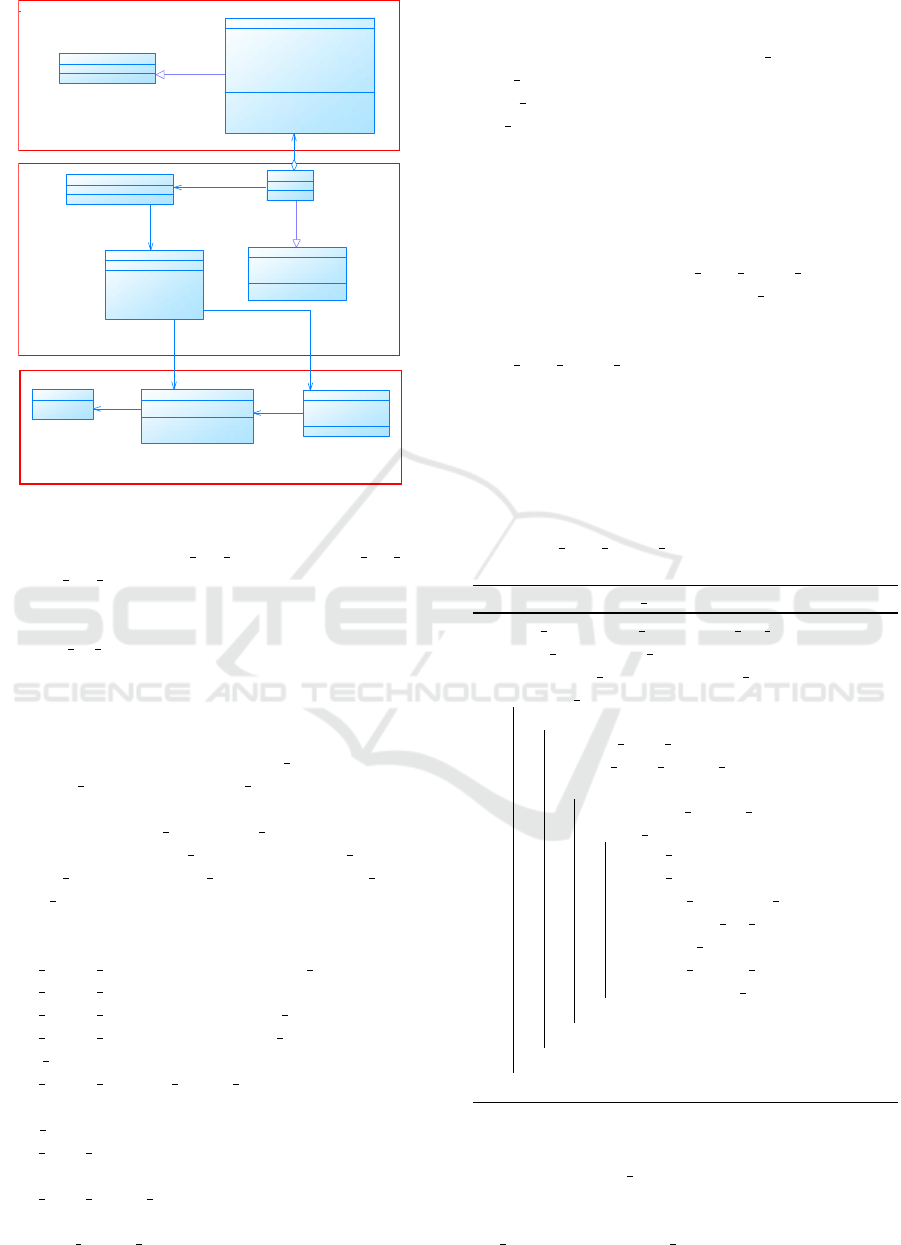
5.1 Middleware Design
In order to model the reconfiguration scenarios in a
real-time REEHMS, a metamodel is developed by us-
ing UML. We propose in Figure 4 the class diagram
for the proposed middleware to be composed of three
layers: i) Software layer, ii) Reconfiguration layer,
and iii) Hardware layer.
Software Layer: It presents the ERT task class
which inherits the pthread attr t. The ERT task is
specified through the real-time parameters: release
time, period, deadline, worst case execution time,
worst case energy consumption, degree of criticality,
and cpu set.
Reconfiguration Layer: The role of the reconfig-
uration layer is to guarantee feasible executions of
the real-time task set on the whole system. The
ERT schedule class permits to schedule the ERT task
according to the proposed energy harvesting schedul-
ing algorithm. The reconfiguration event class
presents the different unpredictable external reconfig-
uration events that can violate the real-time and/or the
energy constraints. The reconfiguration manger class
permits to re-establish the system feasibility by apply-
ing a hardware/software reconfiguration.
Hardware Layer: It contains three classes: proces-
sor, battery, and memory. These classes represent the
hardware components physically implemented in the
platform.
5.2 Basic Structures
We propose to create a new ERT thread that extend
the POSIX thread. Therefore, we define a new
structure of the proposed ERT thread, which contains
the attributes for every thread as described as follows:
typedef struct thread att ERT thread att ERT;
ICSOFT 2017 - 12th International Conference on Software Technologies
350
Undergo
Software layer
Reconfiguration layer
Hardware layer
Undergo
0..1
0..*
0..*
0..1
0..*
0..1
0..*
0..1
0..*
0..1
0..*
0..1
0..*
ERT_Task
-
-
-
-
-
-
-
-
Period
Deadline
Worst case execution time
Worst case energy consumption
Degree of criticality
pthread_attr_t
Release_time
cpu_set
: int
: int
: int
: int
: int
: pthread_attr_t
: int
: int
+
+
+
+
+
ERT_thread_create ()
ERT_thread_init ()
ERT_thread_destroy ()
ERT_thread_execute ()
ERT_thread_compute_energy_utilization ()
...
ERT_Reconfiguration
+
+
+
+
+
+
Reconfiguration scenario_1 ()
reconfiguration scenario_2 ()
reconfiguration scenario _3 ()
ERT_thread_selection ()
ERT_thread_migrate ()
Check_feasibility ()
...
Processor
-
-
Processor_id
Processor_state
: int
: String
+
+
+
ERT_CPU_utilization ()
ERT_CPU_energy_consumption ()
CPU_wait ()
...
Pthread
-
pthread_attr_t
: pthread-attr-t
ERT_scheduler
-
-
-
ERT_queue
waiting_queue
ready_queue
: ERT_queue
: list
: list
+
+
insert_list ()
sort_list ()
...
Battery
-
-
-
Battery_id
Capacity
Harvested_energy
: int
: int
: int
+
Compute_energy_level ()
...
Reconfiguration event
-
Reconfiguration event
: boolean
+
Add_task ()
...
OS
-
OS_id
: int
Memory
-
Memory_id
: int
Figure 4: Class diagram of REHLib architecture.
typedef struct thread attr ERT { pthread attr t *
pthread attr t; int Period; int Deadline; int Worst
Case Execution Time; int Worst Case Energy Con-
sumption; int Degree of Criticality;
} thread att ERT;
At initialization time, the designer has to set the
thread attributes, the period T
i
, deadline D
i
, worst
case execution time WCET C
i
, worst case energy
consumption WCEC En
i
, and degree of criticality
d
c
i
. We define a data structure ERT queue consists of
a waiting queue and a release queue (as well as one
lock per queue).
typedef struct ERT queue ERT queue;
typedef struct ERT queue { waiting queue *
waiting queue; release queue * release queue;
}ERT queue;
In addition we define new functions to extend the
POSIX pthread Lib:
ERT thread create: create a new ERT thread.
ERT thread init: initialize thread attributes.
ERT thread destroy: destroys ERT thread attributes.
ERT thread execute: execute ERT thread.
CPU wait: put the processor on idle state.
ERT thread compute energy utilization(): com-
pute the energy utilization of the corresponding
ERT thread.
ERT CPU utilization(): compute the processor
utilization.
ERT CPU energy consumption(): compute the total
processor energy consumption.
Compute energy Level(t, B
j
): compute the amount of
energy available in the storage unit B
j
corresponding
to processor P
j
at time t.
In order to manage the waiting queue and re-
lease queue, we define new functions:
insert list(): insert an element into a sorted list.
sort list(): sort lists.
5.3 Energy Harvesting Scheduler
In order to implement the task assignment algorithm
(EBU) for the task set in the SMP architecture Sys, we
create a new function EBU ERT thread allocation().
The list of waiting tasks (waiting queue) is sorted
in increasing order of energy utilization. Each task
is allocated to a processor in Sys, according to
EBU ERT thread allocation() algorithm. Therefore,
we use the Processor affinity, in order to enable task
allocation according to energy availability in each
storage associated to each processor in Sys. Processor
affinity is a modification of the native central queue
scheduling algorithm. Each task (be it process or
thread) in the queue has a tag indicating its preferred
/ kin processor. Algorithm 1 depicts the task assign-
ment EBU ERT thread allocation() algorithm.
Algorithm 1: ERT scheduler algorithm.
ERT thread ERT thread; cpu set t cpuset;
ERT queue ERT queue;
while (ERT thread=next(ERT queue − >
waiting queue)=!0) do
if cpu != −1 then
if ERT CPU utilization(cpu) ≤ 1 ||
ERT CPU energy consumption(cpu)
≤ E
B
j
then
if Compute energy level(cpu) >
Max Energy then
CPU ZERO(&cpuset);
CPU SET( cpu , &cpuset);
pthread setaffinity np(0,
sizeof(cpu set t), &cpuset);
pthread setschedparam(
pthread t target thread, int
policy, sched EDF);
end
end
end
end
The scheduling of the proposed algorithm is per-
formed in the ERT schedule() routine. The schedul-
ing occurs on timer handler activation. In the imple-
mentation the scheduler maintains the two lists wait-
ing queue and a release queue (as well as one lock
REHLib: New Optimal Implementation of Reconfigurable Energy Harvesting Multiprocessor Systems
351

per queue). ERT schedule() routine attempts to re-
lease tasks from the waiting queue list. The task set
is executed according to EDF policy.
5.4 Reconfiguration Manager
The role of the reconfiguration manager is to guar-
antee feasible executions of the real-time task set
on the whole SMP architecture. Therefore, when
external events occur at run-time which add new
real-time tasks to be executed on particular proces-
sors, the system may evolves towards an infeasi-
ble state. In section 4, we identified three cases
of failure on a faulty processor. We develop a
ERT reconfiguration() routine for the management
of reconfiguration scenarios (Algorithm 2). For the
implementation of ERT reconfiguration() routine,
we use cpu wait to put the processor in idle mode and
ERT thread execute to put the processor in active
mode. For the task migration we develop the function
ERT thread Migrate().
Algorithm 2: ERT reconfiguration algorithm
ERT thread ERT thread; cpu set t cpuset;
ERT queue ERT queue;
if ERT thread create() &&
CPU ZERO(&cpuset);
CPU SET( cpu , &cpuset);
pthread setaffinity np(0, sizeof(cpu set t),
&cpuset) then
if (ERT CPU utilization(cpu) ≤ 1 &&
ERT CPU energy consumption(cpu) >
E
B
j
) then
if (ERT CPU utilization(cpu) < thr)
then
ERT thread Migrate();
CPU wait();
end
end
end
if (ERT CPU utilization(cpu) > 1 &&
ERT CPU energy consumption(cpu) < E
B
j
)
then
ERT thread selection();
ERT thread Migrate();
end
if (ERT CPU utilization(cpu) > 1 &&
ERT CPU energy consumption(cpu) > E
B
j
)
then
ERT thread Migrate();
CPU wait();
end
ERT thread execute;
6 EXPERIMENTATION
The performance of the proposed operating system
was studied on a 2.50 GHz core i5. In order to as-
sess the performance of the proposed approach, we
perform two sets of experiments. First, we evaluate
the effectiveness of the proposed approach in term
of deadline miss ratio when compared with state-of-
the-art techniques. Second, we evaluate the imple-
mentation of the proposed REHLib to make a quan-
titative evaluation of the overhead introduced by the
ERT reconfiguration schedulers. In order to evaluate
the performance of the proposed approach in term of
deadline success ratio, we consider a set of 50 tasks.
We assume a set of unpredictable reconfiguration sce-
narios applied repeatedly at run-time. Each scenario
adds a set of n tasks such that n is randomly chosen
between 10 and 50. The period of each task is cho-
sen randomly between 10 and 100. The WCET is
randomly chosen between 6 and 20. In the sequel,
we compare the proposed approach with (Ghor et al.,
2011).
Figure 5 clearly shows that EDeg and ERT algo-
rithms provide the same performance when proces-
sor utilization below 0.9. However, the performance
of EDeg algorithm degrades significantly when the
processor utilization increases upper 0.9 due to a
set of reconfiguration scenarios applied repeatedly at
run-time. One of the most important performance
evaluation is the overhead introduced by the ERT
schedulers. By definition, the overhead of an op-
erating system represents the time lost in handling
all kernel mechanisms, such as context-switching
overhead, task scheduling management overhead and
so on. In this experiment, we take interest in the
overhead caused by the ERT
reconfiguration routine
by calculating the ERT CPU energy consumption(),
ERT CPU utilization(), ERT thread selection. In or-
der to assess the introduced overhead we consider dif-
ferent task set where the number of tasks varying in
each set. The considered tasks are generated with a
hyperperiod of 3360 ticks and with periods of 10 mil-
liseconds each one. From Figure 6 we can drive that
the overhead scales with the number of tasks. How-
ever, this time is very low when compared with the
whole measurement period with maximum overhead
of 8 %.
7 CONCLUSION AND FUTURE
WORK
In this paper, we proposed first a new static best fit
task partitioning algorithm based on energy utiliza-
ICSOFT 2017 - 12th International Conference on Software Technologies
352
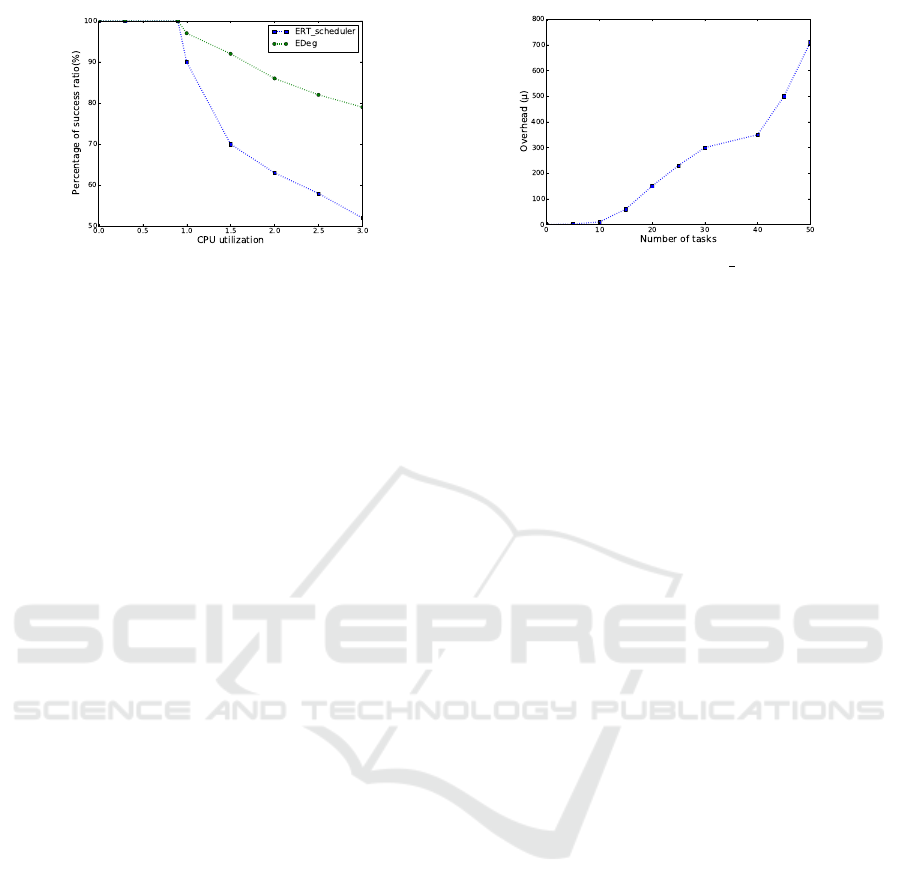
Figure 5: Comparison of deadline success ratio.
Figure 6: Dynamic overhead of ERT reconfiguration sched-
uler.
tion of tasks called BFEBU performed offline. Then,
we proposed a dynamic adaption strategy applied on-
line to perform automatic dynamic reconfiguration
scenarios to deal with unpredictable external events
from the environment or hardware failures, in the pur-
pose to guarantee a feasible executions in the whole
multiprocessor system. We identified three cases of
processor infeasibility: i) Processor overload, ii) En-
ergy starvation, and iii) Both processor overload and
energy starvation. We consider two reconfiguration
scenarios: a) Software reconfiguration which consist
to migrate tasks from one faulty processor to a non
faulty one, and b) Hardware reconfiguration which
consists to switch the faulty processor to the idle
mode for recharging the storage unit. We developed a
new library for reconfigurable energy harvesting mul-
tiprocessor systems called REHLib based on POSIX-
implementation. The developed REHLib library im-
plement the proposed approach and consists of two
software components: reconfiguration manager and
energy harvesting scheduler. The proposed approach
is assessed from two aspects energy gain, and dead-
line success ratio. Extensive simulation experiments
show the effectiveness of the proposed approach com-
pared with previous works in terms of the percentage
of deadline success ratio. A simulation study evaluate
the impact of overheads on the relative performance
of the proposed approach. The authors are now work-
ing on the development of a simulation tool for the
reconfigurable real-time energy harvesting multipro-
cessor systems.
REFERENCES
Allavena, A. and Moss
´
e, D. (2001). Scheduling of frame-
based embedded systems with rechargeable batteries.
In Workshop on Power Management for Real-time and
Embedded systems (in conjunction with RTAS 2001).
Barabanov, M. and Yodaiken, V. (1996). Real-time linux.
Linux journal, 23(4.2):1.
Calandrino, J. M., Leontyev, H., Block, A., Devi, U. C.,
and Anderson, J. H. (2006). Litmusˆ rt: A testbed
for empirically comparing real-time multiprocessor
schedulers. In Real-Time Systems Symposium, 2006.
RTSS’06. 27th IEEE International, pages 111–126.
IEEE.
Chetto, M. (2014). Optimal scheduling for real-time jobs
in energy harvesting computing systems. IEEE Trans.
Emerging Topics in Computing, 2(2):122–133.
Gerum, P. (2004). Xenomai-implementing a rtos emula-
tion framework on gnu/linux. White Paper, Xenomai,
page 81.
Ghor, H. E., Chetto, M., and Chehade, R. H. (2011). A
real-time scheduling framework for embedded sys-
tems with environmental energy harvesting. Comput-
ers & Electrical Engineering, 37(4):498–510.
Grichi, H., Mosbahi, O., and Khalgui, M. (2015). Rocl:
New extensions to ocl for useful verification of flexi-
ble software systems. In Software Technologies (IC-
SOFT), 2015 10th International Joint Conference on,
volume 1, pages 1–8. IEEE.
Housseyni, W., Mosbahi, O., Khalgui, M., and Chetto,
M. (2015). Real-time task reconfiguration in energy-
harvesting based multiprocessor systems. In 29th
European Simulation and Modelling Conference-
ESM’2015.
Housseyni, W., Mosbahi, O., Khalgui, M., and Chetto,
M. (2016). Real-time scheduling of reconfigurable
distributed embedded systems with energy harvesting
prediction. In Distributed Simulation and Real Time
Applications (DS-RT), 2016 IEEE/ACM 20th Interna-
tional Symposium on, pages 145–152. IEEE.
Khemaissia, I., Mosbahi, O., Khalgui, M., and Bouzayen,
W. (2014). New reconfigurable middleware for feasi-
ble adaptive rt-linux. In PECCS, pages 158–167.
Liu, C. L. and Layland, J. W. (1973). Scheduling algo-
rithms for multiprogramming in a hard-real-time en-
vironment. Journal of the Association for Computing
Machinery (JACM), 20(1):46–61.
Lu, J. and Qiu, Q. (2011). Scheduling and mapping of
periodic tasks on multi-core embedded systems with
energy harvesting. In Green Computing Conference
and Workshops (IGCC), 2011 International, pages 1–
6. IEEE.
Mantegazza, P., Dozio, E., and Papacharalambous, S.
(2000). Rtai: Real time application interface. Linux
Journal, 2000(72es):10.
REHLib: New Optimal Implementation of Reconfigurable Energy Harvesting Multiprocessor Systems
353

Masmano, M., Ripoll, I., Crespo, A., and Metge, J. (2009).
Xtratum: a hypervisor for safety critical embedded
systems. In 11th Real-Time Linux Workshop, pages
263–272. Citeseer.
Michael, R. G. and David, S. J. ((1979)). Computers and in-
tractability: a guide to the theory of np-completeness.
WH Freeman and Co., San Francisco.
Mueller, F. et al. (1993). A library implementation of posix
threads under unix. In USENIX Winter, pages 29–42.
Wang, X., Khalgui, M., and Li, Z. (2010). Dynamic low
power reconfigurations of embedded real-time sys-
tems. In Proceedings of the 1st International Con-
ference on Pervasive and Embedded Computing and
Communication Systems, Portugal, volume 6. Cite-
seer.
Wang, X., Khemaissia, I., Khalgui, M., Li, Z., Mosbahi, O.,
and Zhou, M. (2015). Dynamic low-power reconfig-
uration of real-time systems with periodic and prob-
abilistic tasks. IEEE Trans. Automation Science and
Engineering, 12(1):258–271.
Wang, X., Li, Z., and Wonham, W. (2016). Dynamic
multiple-period reconfiguration of real-time schedul-
ing based on timed des supervisory control. IEEE
Trans. Industrial Informatics, 12(1):101–111.
Wei, T., Guo, Y., Chen, X., and Hu, S. (2010). Adaptive
task allocation for multiprocessor socs. In Quality
Electronic Design (ISQED), 2010 11th International
Symposium on, pages 538–543. IEEE.
ICSOFT 2017 - 12th International Conference on Software Technologies
354
