
A Motivating Social Robot to Help Achieve Cognitive Consonance
During STEM Learning
Khaoula Youssef
1
, Walid Boukadida
2
and Michio Okada
1
1
Toyohashi University of Technology, Toyohashi, Japan
2
College Ibnou Sina, Msaken, Tunisia
Keywords:
Anxiety, Learned Helplessness, Motivation, Social Agency, Cognitive Consonance.
Abstract:
In this paper, we show that cognitive consonance could be measured using the perceived cognitive consonance
questionnaire that we present in this paper or using three different constructs which are the prospect, anxiety
and learned helplessness. We used different motivating agents and we verified whether the student’s motivation
would increase too. In the second study, we measured the cognitive consonance using the related questionnaire
and the three constructs that we proofed that they help on measuring the cognitive consonance during the first
study. This method is called the triangulation and help us to make sure that the cognitive consonance has truly
increased or not when we manipulate the motivation construct. Finally, since cognitive consonance increased
when we use a motivating agent, we decided to investigate which of three agents (a teacher, a tablet or a robot)
may lead to better motivation outcome and thus may help the student to strive for answering and focusing
on the difficult scientific questions. Results show that using a robot is the best solution that may increase the
student’s motivation and help him/her to adopt a positive attitude change on a long term basis while the student
starts to concentrate on the difficult questions rather than jumping to the easy ones.
1 INTRODUCTION
The field of social robots has grown into an exten-
sive body of literature over the past years, with a
wide variety of approaches for extracting human pat-
terns and modeling robots’ skills. Robots operate as
partners, peers or assistants in a range of tasks such
as with autistic children (Boccanfuso and O’Kane,
2011)(Wainer et al., 2014), at homes
1
, in hospitals
(Bilge and Forlizzi, 2008) or for having fun; e.g: the
robotic toys from Wowwee
2
, etc. Another role that a
robot can play is the role of a motivating agent to do
difficult tasks; e.g: solving a difficult exercise. Mo-
tivating a student may increase the student’s strive
for cognitive closure
3
while doing difficult exercises.
Many studies from HRI tackled the fact of how to
afford the robot with the ability to motivate people
in many application fields such as at school (Szafir
and Mutlu, 2012), as story-tellers (Ham et al., 2015),
or as inciters to conserve energy (Ham and Midden,
2014), etc. Different points were investigated in other
1
Roomba, iRobot:. http://www.irobot.com
2
Limited, WowWee Group. http://www.wowwee.com/
3
The cognitive closure can be defined as the human’s desire
to eliminate ambiguity and arrive at definite conclusions
HRI studies such as the design strategies to improve
patient motivation during robot-aided rehabilitation
(Colombo et al., 2007), the effect of robot appear-
ance types on motivating donation (Kim et al., 2014),
the role of the socially assistive robot in motivating
older adults to engage in physical exercise (Fasola and
Mataric, 2013), etc.
However, to the best of our knowledge no con-
cern was paid to the serious conflicts that students en-
counter at schools while learning science, technology,
engineering, and mathematics (STEM) and the social
robot key motivating role that can be played. The con-
flicts emerging from solving difficult STEM exercises
may lead to an increased anxiety and learned help-
lessness (Fincham et al., 1989). Anxiety refers to the
extent to which an exercise causes fear and reluctance
from the student’s behalf. Learned helplessness refers
to a disruption in motivation, effect and learning when
the students feel they do not have any control of the
outcome.
Consequently, it is important to give a serious at-
tention to the issue of the dangerous consequences of
cognitive conflict while doing a STEM difficult ex-
ercise. Cognitive conflict is a discomfort that one in
general experiences when a student holds beliefs, at-
322
Youssef, K., Boukadida, W. and Okada, M.
A Motivating Social Robot to Help Achieve Cognitive Consonance During STEM Learning.
DOI: 10.5220/0006429003220329
In Proceedings of the 12th International Conference on Software Technologies (ICSOFT 2017), pages 322-329
ISBN: 978-989-758-262-2
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

titudes or behaviors that are at odds with one another
(the ratio between dissonant and consonant precon-
ceptions about a STEM notion). As a result, we need
to grant the social robot with the ability to follow
closely the student’s engagement and use motivating
strategies that may decrease the cognitive conflict stu-
dents may get through while solving STEM exercises.
In the current research, we investigate how cogni-
tive consonance-related characteristics (i.e., motiva-
tion, prospect
4
, anxiety, and learned helplessness) af-
fect people’s appraisal of cognitive consonance. More
specifically, our main focus is understanding the role
of motivation in the cognitive consonance percep-
tion process. In the first study, employing a large
range of mathematical exercises, we test the relation-
ship between cognitive consonance and the triplet:
prospect, anxiety and learned helplessness. In the sec-
ond study, we examine the role of appraisals of mo-
tivation as they relate to appraisals of prospect, anx-
iety, learned helplessness, and perceptions of cogni-
tive consonance. More specifically, we test whether
the effect of motivation on perceptions of cognitive
consonance is mediated by appraisals of the cognitive
consonance-related characteristics. In the third study,
we complement the correlational approach used in the
second study to understand the role of motivation by
experimentally manipulating agent level’s of agency
and we verify whether it is better to use a human, a
robot or a tablet to better increase the student’s moti-
vation. If the student’s motivation is increased, his
performance during study would increase too. He/
She will have better implicit and explicit attitudes be-
haviors and would be pleased while doing difficult ex-
ercises without jumping from the difficult exercise to
the easy one.
2 BACKGROUND
In our modern-day society, education plays a vital
role. Motivating the student’s while acquiring new
knowledge is one of the most often used strategies
aimed at (re)designing the classroom environment in
such a way as to reduce the poor academic perfor-
mance, lack of motivation for school, loss of interest
in work and poor relationships with peers or teachers.
When cognitive dissonance occurs, different
counter-attitudinal actions can be chosen by the hu-
man and which are: an active attitude change with a
new attitude created
5
, a belief change by minimizing
4
Prospect is typically defined as the extent to which the ex-
ercise’s easiness allows the student to continue resolving
the exercise.
5
The student thinks that he has to change his attitude of
the importance of the cognitive dissonance
6
or a per-
ception change by getting a new information to sup-
port one’s previous decision
7
. When the student ex-
periences cognitive dissonance, he will strive to de-
crease the inconsistency by choosing one of the de-
scribed counter-attitudinal actions. We want that stu-
dents get rid of their bad attitudes of skipping the diffi-
cult STEM exercise. The new formed attitude should
be highly accessed so that it can be stored on a long
term basis on the student’s cognitive miser
8
.
3 FIRST STUDY
3.1 Method
Different groups of participants independently tried to
answer a set of mathematical small questions included
in a quizz and then evaluate exercises either on cogni-
tive consonance-related characteristics (i.e., prospect,
anxiety, and learned helplessness) or on perceived
cognitive consonance. We expected that appraisals
of prospect would be positively associated with per-
ceived cognitive consonance, and that appraisals of
learned helplessness and anxiety would be negatively
associated with perceived cognitive consonance. We
employed a within-subjects design in which partici-
pants evaluated a set of 100 small mathematical ques-
tions. The dependent variables were prospect, anxiety
and the learned helplessness. Our sample comprised
31 participants (15 males and 16 females, Mean(age)
= 16.03, SD(age) = 2.45, with age range [13.5-19.5]
years). The participants were students in Ibnou Sina
College (Figure 2).
3.2 Materials and Measures
The current study comprised 100 mathematical ques-
tions set by an experienced teacher. We measured dif-
ferent components which are the prospect, the anxiety
and the learned helplessness using slight adaptations
of the items used in the literature. The different com-
ponents were each measured using three five-point re-
sponse category format items, ranging, for example,
from (1) ”strongly disagree” through (3) ”neutral” to
(5) ”strongly agree”. We calculated the average of the
different items for each measure and used these ag-
avoiding difficult exercises.
6
After all, science learning is not that important. Many
other tasks could be done.
7
The student thinks that the answer afforded by the book is
incorrect.
8
By measuring the implicit and explicit attitudes, we can
verify whether it was established for a long term basis.
A Motivating Social Robot to Help Achieve Cognitive Consonance During STEM Learning
323

camera
Speaker
microphone
servo
motors
(a)
Denial gesture
Back
Forward
Right
Left
Conrmation
gesture
Disappointement
gesture
(b)
Figure 1: (a) A close-up picture of ROBOMO; (b)
ROBOMO overall design.
Current question Next question
Figure 2: The first study overall experiment setup.
gregate scores in our analyses (α
cognitive
c
onsonnance
=
.91, α
prospect
= .95, α
anxiety
= .69 and
α
learned
h
elplessness
= .79.
3.3 Results and Discussion
All of the reported analysis are performed on the ag-
gregate measure scores for each mathematical ques-
tion across all participants. Descriptives for the
measures of our dependent variables are presented
in Table 1. We first examined correlations be-
tween cognitive consonance and the measures of the
consonance-related characteristics (prospect, anxiety,
learned helplessness) (Table 2). As expected, per-
ceived cognitive consonance was positively corre-
lated with prospect (r = .71, p ≤ .001), and nega-
tively correlated with anxiety (r = -.65, p ≤ .001) and
learned helplessness (r =-.85, p ≤ .001). These re-
sults show that appraisals of prospect, anxiety, and
learned helplessness are highly associated with the
perception of cognitive consonance even when the
ratings of perceived cognitive consonance and the
cognitive consonance-related situation characteristics
are obtained independently from each other. Next,
we examined the correlations among the measures of
the cognitive consonance-related characteristics (Ta-
ble 2). Prospect was negatively correlated with anxi-
Table 1: Descriptives for the measures of cognitive conso-
nance, prospect, anxiety, and learned helplessness.
M SD Min Max
Cognitive Consonance 3.16 0.70 1.25 4.31
Prospect 2.84 0.71 1.25 4.22
Anxiety 3.12 0.55 1.98 4.56
Learned Helplessness 3.23 0.63 2.04 4.87
ety (r = -.83, p ≤ .001) and learned helplessness (r =
-.72, p ≤ .001), and anxiety was positively correlated
with learned helplessness (r = .73, p ≤ .001).
Next, we used multiple regression analysis to
test whether appraisals of the cognitive consonance-
related situation characteristics (prospect, anxiety,
learned helplessness) predicted appraisals of per-
ceived cognitive consonance. We found that the
three predictors accounted for approximately 75% of
the variance in perceived cognitive consonance with
F(3,96) = 94.77, p ≤ .001, R
2
= .75, and R
2
ad j
=
.74. As expected, appraisals of both anxiety and
prospect significantly predicted perceived cognitive
consonance (Table 3). Anxiety was not found to pre-
dict perceived cognitive consonance to a significant
extent (Table 3).
One problem with multiple regression analysis
is that they fail to appropriately partition the vari-
ance when the predictors in the model are highly
correlated. Thus, an assessment of the relative con-
tribution of the three predictors to cognitive conso-
nance evaluation characteristics
9
was impeded by the
high multi collinearity between these predictor vari-
ables in our data (Table 2). Hence, we employed
the rego
2
package, available for Stata, that utilizes
Shapley value decomposition to decompose the over-
all model goodness-of-fit index (in our case R
2
) into
independent contributions of the predictor variables.
While appraisals of anxiety were not found to sig-
nificantly predict perceived cognitive consonance in
our multiple regression analysis, the results from the
R
2
decomposition revealed that anxiety contributed
only slightly less to the overall variance as compared
to prospect (Table 3). In line with the multiple re-
gression analysis, the results of the R
2
decomposition
indicated that of the three predictors in our model,
appraisals of learned helplessness contributed most
strongly to the overall variance. We tested the robust-
ness of our regression model by performing 100 split
9
Cognitive consonance characteristics evaluation is ac-
counted for by prospect (perceived student’s desire to con-
tinue with solving the mathematical exercises), anxiety
(perceived student’s anxiety after solving a mathematical
exercise), and learned helplessness (a situation in which
a student believes that his efforts are going for waste and
that he got a problematic cognitive problem that prevent
him from understanding mathematics).
ICSOFT 2017 - 12th International Conference on Software Technologies
324
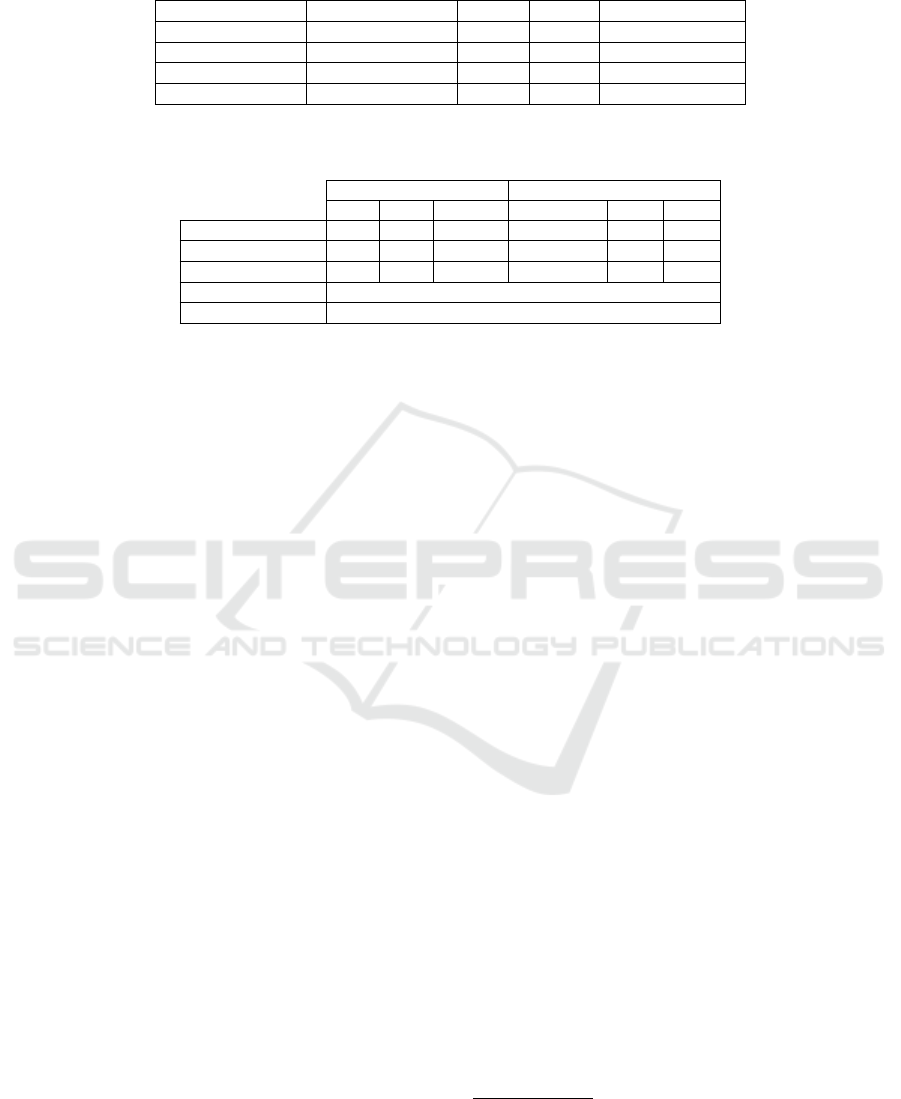
Table 2: Correlations between measures of cognitive consonance, prospect, anxiety, and learned helplessness (Note ***
p ≤ .001).
Cognitive Consonance Prospect Anxiety Learned Helplessness
Cognitive Consonance -
Prospect .71*** -
Anxiety -.65*** -.83*** -
Learned Helplessness -.85*** -.73*** -.73*** -
Table 3: OLS multiple regression results with the decomposition of R
2
(in % of total R
2
). Lower level (LLCI) and upper level
(ULCI) confidence intervals based on bootstrapping with 5000 resamples.
Multiple Regression Decomposition of R
2
Beta t p Shapley %R
2
LLCI ULCI
Prospect 0.26 2.71 0.008 25.58 18.14 32.3
Anxiety 0.12 1.26 0.211 19.1 13.04 27.2
Learned Helplessness -0.75 -9.49 p ≤.001 55.32 43.64 67
Observations 100
Full model R
2
0.75
sample validations. In each instance, the original
100 stimuli were randomly assigned to two groups of
equal size. The regression weights of prospect, anx-
iety, and learned helplessness obtained from a multi-
ple regression analysis on the first group, were then
used to calculate predicted scores for perceived cog-
nitive consonance of the second group. In the last
step, the correlation between the observed scores and
the predicted scores for the second group was calcu-
lated. The results show a high robustness of our re-
gression model across the 100 split sample validations
(M
r
= .86, SD
r
= .033, M
R
2
= .74).
Across our large sample of representative envi-
ronments, our regression model, predicting perceived
cognitive consonance from appraisals of prospect,
anxiety, and learned helplessness accounted for ap-
proximately 75% of the variance in cognitive con-
sonance judgments. The model was found to be ro-
bust across 100 split sample validations. As expected,
both prospect and anxiety were identified as signif-
icant predictors of perceived cognitive consonance.
Moreover, our findings are in line with previous find-
ings indicating that appraisals of learned helplessness
are most strongly associated with perceived cognitive
consonance. In contrast to previous findings, anxiety
was not found to make a significant contribution to
perceived cognitive consonance in our model.
4 SECOND STUDY
We extended our investigation to the role of a mo-
tivating agent’s presence in the cognitive consonance
appraisal process by including participants’ appraisals
of the agent in our regression model. Our goal is to
enhance the student’s academic skills. We assumed
that the presence of a motivating agent that may con-
vince the student to continue resolving the difficult
STEM exercise even when he/she faces a cognitive
dissonance situation, may enhance the student’s ap-
preciation of the STEM (science, technology, engi-
neering and mathematics) subjects. The agent is sup-
posed to encourage the student to achieve the task of
answering the mathematical set of questions. In gen-
eral, when a student faces a difficult STEM exercise
and he/she finds out that his/her answer is incorrect,
he/she will jump to the next exercise by adopting a
belief change as a counter-attitudinal behavior. If he/
she opts for redoing the exercise that was previously
answered incorrectly without putting so much effort
while redoing it so that he/she gets to the correct an-
swer, we say that the student chooses a perception
change as a counter-attitudinal behavior. We want that
the student chooses the attitude and behavior change
as a counter-attitudinal behavior after being stricken
by the cognitive dissonance, so that he/she learns ef-
ficiently the STEM subjects. We used different types
of agents that may help the student to overcome the
cognitive dissonance which are: a friend (of the same
age), a teacher, a robot (ROBOMO), a tablet. The
different agents use three different mixed strategies to
motivate the student which are the door in face
10
and
labeling techniques.
We expect that, an enlightening motivating agent
may empower the student to make an easy shortcut,
reduce the cognitive workload and follow the mo-
tivating message’s guidelines consisting on redoing
the STEM question that was previously answered in-
correctly rather than adopting a perception or belief
10
Here, we need to start by an inflated request and then re-
treat to a smaller request. After the first request is refused,
the human will feel that he/she needs to change his/her
opinion since the initial request has changed (a matter of
reciprocity).
A Motivating Social Robot to Help Achieve Cognitive Consonance During STEM Learning
325

change strategies.
The general aim of the second study is to exam-
ine the path through which appraisals of the motiva-
tion afforded by the agent in a situation that leads
to a cognitive dissonance, affect people’s apprecia-
tion and cognitive consonance. We employed a sim-
ilar design as the previous study and asked partici-
pants to evaluate the different motivating agents that
were combined with the set of mathematical questions
used in the previous study. We assign randomly for
each question one of the 3 different agents. Follow-
ing previous findings from the literature, we expected
to find that appraisals of the motivating agents would
be positively associated with the appraisals of the cog-
nitive consonance obtained in the previous study. We
expected that this effect of perceived motivation af-
forded by the agent on perceived cognitive conso-
nance would, at least partially, be mediated by the ef-
fect of perceived motivation afforded by the agent on
the cognitive consonance-related characteristics (i.e.,
prospect, anxiety, and learned helplessness).
4.1 Method
We employed a within-subjects design in which par-
ticipants evaluated the perceived motivation afforded
by the agent while they are resolving the mathemati-
cal questions. The sample comprised 46 participants
(22 males and 24 females, M
age
= 30.37, SD
age
=
14.51, age range = 18 - 62 years). The participants
were registered in Ibnu Sina College.
4.2 Materials and Measures
We used the same set of mathematical questions used
in the previous study. Perceived motivation afforded
by the agent was measured using different five-point
response category format items ranging, for example,
from (1) ”Not interested” through (3) ”neutral” to (5)
”Interested”
11
. We calculated the average of the items
for each mathematical question and used this aggre-
gate score in our analysis (α = .87).
4.3 Procedure
The procedure and conditions of the second study
were analogous to those of the previous one, except
that while answering each question of the mathemati-
cal quizz, an agent speaks out loud a motivating mes-
sage so that we can ensure that the student keeps on
answering the quizz even if the questions are difficult.
In fact, if the question is difficult and the student rec-
ognizes that his answer is incorrect, he may feel dis-
11
https://goo.gl/forms/PYTnJLe44mIMkJN12
appointed. His mathematical preconceptions are de-
feated and he experiences a discrepancy between
what he believes and the answer. In such a case,
a successfully motivated student would answer the
same question that was previously answered incor-
rectly. All participants responded to the items of the
perceived motivation questionnaire.
4.4 Results and Discussion
We added the aggregated perceived motivation af-
forded by the agent measure’s score as a new vari-
able to the data set containing the prospect, anxiety,
learned helplessness, and perceived cognitive conso-
nance obtained in the previous study. Descriptives for
the measure of perceived motivation afforded by the
agent measure are presented in Table 4. We first ex-
amined the correlations between the perceived moti-
vation afforded by the agent’s measure and the mea-
sures from previous study (Table 5). We found that
perceived motivation afforded by the agent was posi-
tively correlated with perceived cognitive consonance
(r = .47, p ≤ .001) and prospect (r = .76, p ≤ .001),
and negatively correlated with anxiety (r = -.48, p ≤
.001) and learned helplessness (r = -.49, p ≤ .001).
To test whether appraisals of the perceived moti-
vation afforded by the agent predicted appraisals of
perceived cognitive consonance, we performed a re-
gression analysis. The regression model accounted
for approximately 20% of the variance in perceived
cognitive consonance with F(1,98) = 27.28, p ≤ .001,
R
2
= .22, and R
2
ad j
= .21. As expected, perceived mo-
tivation afforded by the agent was significantly related
to perceived cognitive consonance (β = .48, t = 5.22,
p ≤ .001). The regression model was moderately ro-
bust across 100 split sample validations (M
r
= .48,
SD
r
= .079, M
R
2
= .22).
Next, a multiple regression analysis was con-
ducted with both the perceived motivation afforded by
the agent and the cognitive consonance-related char-
acteristics (prospect, anxiety, learned helplessness)
as predictors. The combination of measures signifi-
cantly predicted perceived cognitive consonance with
F(4,95) = 72.31, p ≤ .001, R
2
= .75, and R
2
ad j
=
.74. However, while the measures of the cognitive
consonance-related characteristics predicted signifi-
cantly over and above the perceived motivation af-
forded by the agent measure with R
2
change = .54,
F(3, 95) = 68.53, p ≤ .001, the perceived motivation
afforded by the agent measure did not predict signif-
icantly over and above the measures of the cognitive
consonance-related characteristics with R
2
change =
.01, F(3, 95) = 1.99, p = .161. Based on these results,
perceived motivation afforded by the agent appears to
ICSOFT 2017 - 12th International Conference on Software Technologies
326

Table 4: Descriptives for the measure of perceived motivation afforded by the agent.
M SD Min Max
Perceived motivation afforded by the agent perceived motivation afforded by the agent 2.91 0.69 1.26
Table 5: Correlations between the measures of perceived perceived motivation afforded by the agent of the current study and
the measures cognitive consonance, prospect, anxiety, and learned helplessness of the previous study. *** p ≤.001.
Perceived Consonance Prospect Anxiety Learned Helplessness
Perceived motivation afforded by the agent .47*** .76*** -.48*** -.49***
Table 6: Summary of mediation analysis results. 95% confidence intervals based on bootstrapping with 5000 resamples.
Reported confidence intervals are bias corrected. *** p ≤.001
Independent variable total effect direct effect mediator a b indirect effect LLCI ULCI
Perceived motivation afforded by the agent .476*** -0.127 prospect .787*** .41*** 0.322 0.103 0.593
anxiety -.381*** 0.241 -0.092 -0.24 0.02
learned helplessness - .447*** -.833*** 0.372 0.214 0.574
offer little additional predictive power beyond that
contributed by appraisals of prospect, anxiety, and
learned helplessness.
While our results show that appraisals of the
perceived motivation afforded by the agent are in-
deed associated with perceived cognitive consonance,
the lack of predictive power over the cognitive
consonance-related characteristics and the medium to
high correlations between perceived motivation af-
forded by the agent and the cognitive consonance-
related characteristics suggest that this association
may be mediated by changes in appraisals of prospect,
anxiety, and learned helplessness. We used the boot-
strapping method for multiple mediation by Preacher
and Hayes (Kristopher and Hayes, 2008) to test
whether the effect of perceived motivation afforded
by the agent on perceived cognitive consonance was
mediated by appraisals of the cognitive consonance-
related characteristics. See Table 5 for a summary of
the results of our mediation analysis.
The results of the mediation analysis show that
perceived motivation afforded by the agent is posi-
tively related to prospect, and negatively related to
anxiety and learned helplessness. Our results also
confirm the multiple regression analysis, showing that
perceived motivation afforded by the agent (total ef-
fect), prospect and anxiety were significantly related
to perceived cognitive consonance. The bootstrapping
method provides estimates and bias corrected confi-
dence intervals for the indirect effects in the model.
If the confidence intervals do not contain zero, the
estimate of the indirect effect is significant. Fol-
lowing this criterion, the results show that both the
indirect effect of prospect and anxiety were signifi-
cant. The indirect effect of anxiety was not signif-
icant. Importantly, our results show that if we ac-
count for the relation between perceived motivation
afforded by the agent and appraisals of the cognitive
consonance-related characteristics, the effect of per-
ceived motivation afforded by the agent on perceived
cognitive consonance (direct effect) is no longer sig-
nificant, suggesting that this effect is fully mediated
by changes in appraisals of prospect and anxiety.
In sum, our results show that while perceived mo-
tivation afforded by the agent significantly affects the
perceived cognitive consonance. These findings pro-
vide evidence for the idea that the motivation afforded
by the agent (friend, robot, teacher, tablet) influences
cognitive consonance perceptions indirectly through
its effect on those cognitive consonance characteris-
tics (prospect, anxiety and learned helplessness) that
are important for the cognitive consonance appraisal
process.
5 THIRD STUDY
As motivation has a direct effect on the cognitive con-
sonance and we have opted to use different agents in
the previous study (study 2). We decided to verify
which of the three different agents type may lead to
the highest motivation perception.
5.1 Method
66 Tunisian students participated in this experiment
([17-19] years) from Farhat Hached College. Par-
ticipants were debriefed which may help us to eval-
uate their planned attitude
12
. Participants were told
that they would resolve some exercises to help eval-
uate a new robot platform. Once a student enters to
the room, he/she was asked to do the calibration (eye
tribe) and then starts answering the exercises. We in-
form the student that he/she can choose to jump to the
next exercise if the current one is difficult. When the
12
This is to measure the student’s explicit attitude. We just
ask respondents to think about and report their attitudes.
A Motivating Social Robot to Help Achieve Cognitive Consonance During STEM Learning
327
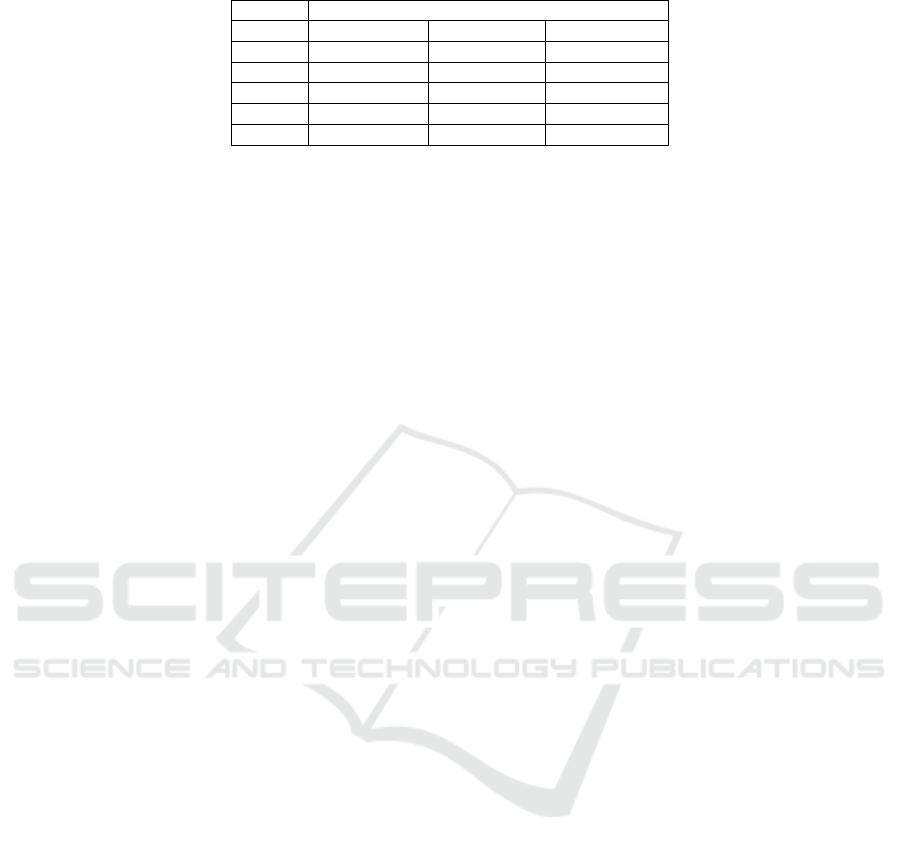
Table 7: A table showing the second main effect investigation results (tablet vs robot; tablet vs human and robot vs human).
Factor Comparison contrast (F, p-value)
Tablet vs robot Tablet vs human Robot vs human
Pleasure (149.3,<0.001)R (16.34, 0.06) (83.58, <0.001)R
IAT (21.92,<0.001)R (37.54,0.003)H (2.29, 0.013)R
Cog.Diss (136.8,<0.001)R (17.9,<0.001)H (88.5,0.04)R
Quotient (26.09,<0.001)R (5.17,0.049)H (2.6, 0.009)R
Looks (84.4,<0.001)R (54,0.008)H (71.08, <0.001)R
student feels that he/she wants to leave the room
or when he/she finishes the exercises’ collection,
we thank him/her and he/she has to answer a post-
experiment survey. We divided our participants
(within subjects design experiment) in a way that we
can guarantee that we have a counterbalance of the
data, thereby reducing the effect of the sequence of
trials on the results.
ROBOMO generates the motivating speech that it
is coordinated with the robot’s convenient gestures
(body and head gestures) and the right tone. The moti-
vating speech used by the different types of agents fol-
lows the technique labeling technique. As a reminder,
the labeling technique involves assigning a label to the
individual and then requests a favor that it is consis-
tent with the label. For example telling to a student: I
know you are striving to success and deep inside you
are hard worker. In such case, the student has more
tendency to live up with the positive label. Thus, one
way to make a human produce the desired behavior
is to assign positive label to him/her so that you can
drive him/her to live up with that label and maintain
that positive consistency that serves the public image
of the person as well as his/her self-esteem. There are
four conditions the student takes part in which are:
the baseline condition (No motivating message is af-
forded), condition 1 (the tablet affords the motivating
message), condition 2 (the robot affords a motivating
message) and condition 3 (the human affords a moti-
vating message). Each two days, the student comes to
the classroom to redo another set of questions with a
new set of motivating messages while we change the
motivating source.
5.2 Materials and Measures
After the experiment finished, the student has to an-
swer questionnaires such as the explicit attitude (Pan-
tos and Perkins, 2013), the implicit attitude (implicit
association test): IAT (Pantos and Perkins, 2013), the
cognitive dissonance (cogn.diss) (Levin et al., 2013)
and the perceived pleasure’s level(Bradley and Lang,
1994). We considered other dependent variables:
• The quotient: Number of times the user redoes
incorrect question by the number of times the user
makes an error. It gives an idea about when has
the student a tendency to redo incorrect questions
to strive for science learning rather than jumping
from one question to another.
• Looks: number of times the user ”dwells” with
eye gaze between the 2 questions.
5.3 Results and Discussion
The motivating message source agency’s level had
a main effect in terms of all the constructs with
a P-value <0.001. Table7, shows that there were
significant differences between the robot and tablet
conditions with higher results in the robot’s condi-
tion for all the constructs. Also, Table7 shows that
using a robot as a motivating source in compari-
son to using a human increases cog.diss: ((F=88.5,
p-value=0.04<0.05)R) and looks: ((F=71.08, p-
value<0.001)R). There were statistical differences
in terms of pleasure with higher results in the
robot’s condition rather than in the human’s con-
dition ((F=83.58, p-value<0.001)R), IAT ((F=2.29,
p-value=0.013<0.05) R) and quotient ((F=2.6, p-
value=0.009<0.01)R).
6 CONCLUSION
Motivating a student is commonly associated with a
positive effect on the experience of cognitive conso-
nance. Yet, little is known about the psychological
processes through which perceived motivation may
exert its influence on people’s cognitive consonance
perceptions. We investigated the role of motivation in
cognitive consonance perception using a wide range
of different agents types. Across two studies, we
tested the idea that motivation influences appraisals of
cognitive consonance through its effect on appraisals
of cognitive consonance-related characteristics (i.e.,
prospect, anxiety, and learned helplessness). The
more an agent motivates the student, the more he/she
gets clear ideas and scores high in terms of cognitive
consonance. Finally, we compared different agents
types to verify which one of them may lead to better
motivation and thus higher cognitive consonance. Re-
sults show that using a robot may lead to better results
ICSOFT 2017 - 12th International Conference on Software Technologies
328

in terms of perceived motivation. Thus, the students
having a robot as a motivating source adopt a posi-
tive counter-attitudinal behavior (attitude and behav-
ior change) while they strive to answer the STEM
questions that were previously answered incorrectly.
REFERENCES
Bilge, M. and Forlizzi, J. (2008). Robots in organizations:
The role of workflow, social, and environmental fac-
tors in human-robot interaction. In Proceedings of the
3rd ACM/IEEE International Conference on Human
Robot Interaction, pages 287–294. ACM.
Boccanfuso, L. and O’Kane, J. M. (2011). Charlie: An
adaptive robot design with hand and face tracking for
use in autism therapy. International Journal of Social
Robotics, pages 1–11.
Bradley, M. and Lang, P. J. (1994). Measuring emotion:
the self-assessment manikin and the semantic differ-
ential. Journal of behavior therapy and experimental
psychiatry, 25(1):49–59.
Colombo, R., Pisano, A., Mazzone, C., Delconte, S.,
Micera, K., Carrozza, M., Chiara, P., and M., G.
(2007). Design strategies to improve patient motiva-
tion during robot-aided rehabilitation. Journal of Neu-
roEngineering and Rehabilitation, 4(1):3.
Fasola, J. and Mataric, M. (2013). Socially Assistive Robot
Exercise Coach: Motivating Older Adults to Engage
in Physical Exercise, pages 463–479. Springer Inter-
national Publishing.
Fincham, F., Hokoda, A., and Sanders, R. (1989). Learned
helplessness, test anxiety, and academic achieve-
ment: a longitudinal analysis. Child Development,
60(1):138–145.
Ham, J., Cuijpers, R., and Cabibihan, J. (2015). Combining
robotic persuasive strategies: The persuasive power of
a storytelling robot that uses gazing and gestures. In-
ternational Journal of Social Robotics, 7(4):479–487.
Ham, J. and Midden, C. J. (2014). A persuasive robot to
stimulate energy conservation: The influence of pos-
itive and negative social feedback and task similarity
on energy-consumption behavior. International Jour-
nal of Social Robotics, 6(2):163–171.
Kim, R., Moon, Y., Choi, J., and Kwak, S. (2014). The ef-
fect of robot appearance types on motivating donation.
In Proceedings of the 2014 ACM/IEEE International
Conference on Human-robot Interaction, pages 210–
211, New York, NY, USA. ACM.
Kristopher, J. and Hayes, A. (2008). Asymptotic and re-
sampling strategies for assessing and comparing in-
direct effects in multiple mediator models. Behavior
Research Methods, 40(3):879–891.
Levin, D., Adams, J. A., Harriott, C., and Zhang, T. (2013).
Cognitive dissonance as a measure of reactions to
human-robot interaction. Journal of Human-Robot In-
teraction, 2(3):3–17.
Pantos, A. and Perkins, A. (2013). Measuring implicit
and explicit attitudes toward foreign accented speech.
Journal of Language and Social Psychology, 32(1):3–
20.
Szafir, D. and Mutlu, B. (2012). Pay attention!: Designing
adaptive agents that monitor and improve user engage-
ment. In Proceedings of the SIGCHI Conference on
Human Factors in Computing Systems, pages 11–20,
New York, NY, USA. ACM.
Wainer, J., Robins, B., Amirabdollahian, F., and Dauten-
hahn, K. (2014). Using the humanoid robot kas-
par to autonomously play triadic games and facili-
tate collaborative play among children with autism.
IEEE Transactions on Autonomous Mental Develop-
ment, 6(3):183–199.
A Motivating Social Robot to Help Achieve Cognitive Consonance During STEM Learning
329
