
MPC-based Management of Energy Resources in Smart Microgrids
Le Anh Dao, Luca Ferrarini and Luigi Piroddi
Dipartimento di Elettronica, Informazione e Bioingegneria, Politecnico di Milano, P.za L. da Vinci 32, 20133 Milano, Italy
Keywords: Microgrid, Energy Management, Distributed Control, Model Predictive Control, Quadratic Programming.
Abstract: This paper presents a model predictive control approach for the economic optimization of a microgrid
including smart buildings, wind power production facilities and an energy storage unit. Various
optimization scenarios are considered in a comprehensive and unified framework, which can be adapted to
pursue different objectives at the same time, such as ensuring the electricity supply to the smart buildings,
maximizing the profit from the electricity trading market, or managing the energy storage. The optimization
problem can be addressed in a model predictive framework using the receding horizon approach, and
ultimately formulated as a quadratic programming problem, which can be solved with reliable and efficient
tools. In order to analyze a realistic scenario, the relevant data are taken from real systems (i.e., from a real
wind farm and from a real commercial building, located in Italy). Simulation results show the economic
advantages that can be gained through the combined usage of renewable energy generation and energy
storage.
1 INTRODUCTION
The increase in the cost of energy produced with
conventional fossil fuels and the growing concern
for the environmental problems related with their
usage have fostered the interest in alternative energy
sources, such as Renewable Energy Sources (RES),
to be placed in the vicinity of the end users, thus
reducing the energy losses. This entails a radical
change towards the concept of microgrid.
Microgrids are relatively small electricity networks,
that can include any type of distributed energy
resources, as well as consumption and storage
elements.
The development of optimal control solutions for
microgrids has been the objective of several recent
research endeavors, employing, e.g., heuristic
algorithms (Gu et al., 2010), or genetic algorithms
(Nemati et al., 2015). One particularly exploited
methodology in this context is Model Predictive
Control (MPC), which is well suited to deal with the
large amount of constraints and multiple objectives
that have to be imposed in real time and the tight
performance requirements associated to these
systems.
For example, the MPC approach has been
applied to the problem of optimally dispatching
power to the grid in (Teleke et al., 2010); the
problem of energy management in microgrid in
(Parisio et al., 2014), , (Clarke et al., 2016),
(Ferrarini et al., 2014), (Silvente et al., 2015).
Among these papers, the formulations considered in
(Parisio et al., 2014), (Silvente et al., 2015), and
(Clarke et al., 2016) all exploit a combination of
MPC and Mixed Integer Linear Programming
(MILP). A more comprehensive case is studied in
(Parisio et al., 2014) that includes ESS units, RESs,
distributed generators and (partially) controllable
loads. The general problem formulation takes into
account various factors, such as different
charge/discharge efficiencies in the ESS elements,
electricity trading with the grid (with different
purchase and sale prices), start-up and shut-down
costs of the distributed generators, operating and
maintenance costs of the ESS elements and the
distributed generators. The RESs considered in that
work are of the photovoltaic type, which allow a
good short-term prediction (Accetta et al., 2012), as
opposed to wind generators.
This paper proposes an MPC approach for the
economical optimization of a microgrid equipped
with wind power sources, an ESS and a smart
building, that interacts with the energy market. The
battery controller is designed to maximize the
economic benefit related to the electricity trading on
the market, taking into account various types of
246
Dao, L., Ferrarini, L. and Piroddi, L.
MPC-based Management of Energy Resources in Smart Microgrids.
DOI: 10.5220/0006427902460253
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 246-253
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
penalties imposed to electricity suppliers. In
particular, innovative contributions are the use of a
detailed model of the electricity trading conditions,
that includes both imbalance charges (with relative
tolerances) and load curtailment penalties, and the
use of a nonlinear model for the ESS, that includes
charge/discharge efficiency curves. This research
extends the study presented in (Ferrarini et al., 2014)
to a more general microgrid energy management
scenario with controllable loads (in a demand
response perspective), endowed with storage and
generation facilities. Various objectives, grid-,
comfort- or economic-oriented, can be pursued. To
focus on the main power flows, the microgrid is
simplified by aggregating the loads, the generation
units, and the storage systems, respectively. The
optimization problem is solved in the MPC
framework using standard quadratic programming
(QP) tools, as opposed to other approaches which
use MILP (and require suitable simplifications of
nonlinear terms) (Parisio et al., 2014).
The rest of the paper is organized as follows. The
microgrid setting and considered scenarios are
described in Section 2, the corresponding model
being explained in Section 3. The control
architecture and algorithms are introduced in Section
4. Simulation results are illustrated in Section 5
before the concluding remarks (Section 6).
2 MICROGRID SYSTEM AND
SCENARIOS
2.1 System Description
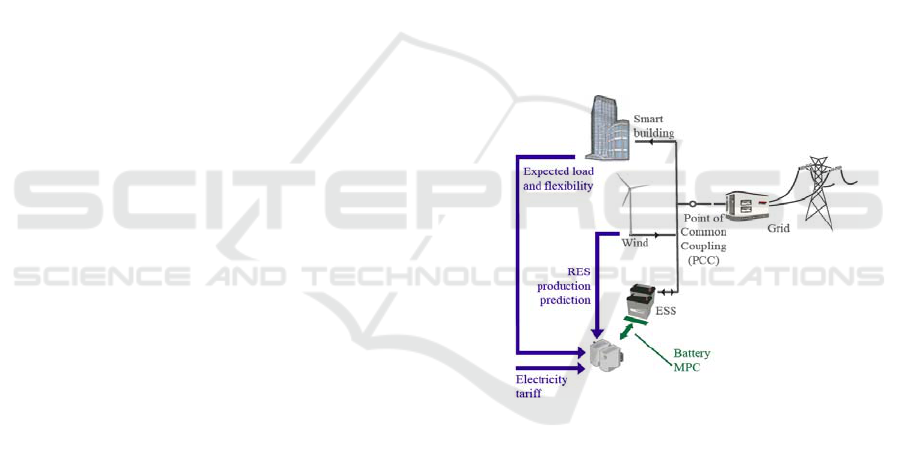
The microgrid considered in this paper (see Fig. 1),
comprises a smart building (i.e., a large load
representing, e.g., a large industry, an airport, a
shopping district, a commercial building, or several
building blocks), a RES (e.g., a wind farm) and an
ESS (a battery). All components are connected on
the same electricity bus and linked with the main
grid by a Point of Common Coupling (PCC),
assumed always closed (grid-connected mode). The
electricity required by the load can be taken from
either the RES or the ESS, or purchased from the
grid. The excess electricity generated by the RES or
stored in the ESS can also be sold to the grid.
Battery charging and discharging is managed by
an MPC-based controller, that receives as inputs the
predicted production of the RES, the load demand,
the electricity tariffs, and aims at the minimization
of the total energy cost of the microgrid. Moreover,
the control system is designed to fulfill all the
relevant operating constraints, namely the bounds on
the maximum charge/discharge power, and on the
maximum and minimum energy levels allowed for
the battery, as well as the maximum deviation on the
load profile tracking.
A smart building is endowed with some
flexibility in the tracking of the load demand. For
example, a flexible load control system is developed
in (Ferrarini and Mantovani, 2013) and (Mantovani
and Ferrarini, 2015), that pursues a threefold
objective, namely energy cost minimization,
temperature regulation (at each floor), and load
tracking. For simplicity, we do not here include the
load control system, while still allowing for some
flexibility in the load tracking for demand-response
scenarios. As discussed later on, the level of
flexibility is established by way of an interaction and
negotiation process between the load and the
microgrid energy manager in charge of the battery.
The present paper focuses solely on the control
design for the battery system in the microgrid.
Figure 1: Considered microgrid, with a single PCC.
2.2 Control Objectives
The paper provides a general, comprehensive
framework for the modeling and control of
microgrids to be designed to pursue a trade-off
between different objectives. The main control
objectives are listed below:
Energy cost minimization – The battery must
supply the load with the required electrical
energy, exploiting the RESs and operating the
microgrid at the minimum possible monetary
expense, based on the knowledge of purchase
and sale tariffs and the (estimated) future RES
production in the considered prediction horizon.
Minimization of imbalance charges – Energy
MPC-based Management of Energy Resources in Smart Microgrids
247

exchanges with the grid are regulated by a
negotiation (performed on a daily basis) with the
utility provider, that sets a power profile (i.e.,
day-ahead production) and relative tolerances,
the violation of which results in monetary
penalties.
Optimal load curtailment – The load power
profile can be modified (within tolerance bounds
specified by the load side), at a cost (curtailment
penalty), in the interest of the entire microgrid.
Smoothing of the power flow – Abrupt changes in
the power flows may damage the building
actuators and adversely affect the power quality
or even the grid reliability.
Furthermore, the control system takes into account
the nonlinear characteristics of the battery. The
multi-objective optimization problem is formulated
by introducing suitable coefficients for the
individual objectives, whose tuning modulates the
focus of the MPC. The latter is constrained by the
battery operating conditions, such as peak power and
state of charge bounds.
3 MODEL FORMULATION
3.1 Power Balance Equation
The power flow in the microgrid is described by the
power balance equation:
,
(1)
where is the discrete time step,
is the
incoming power flow at the PCC,
is the power
supplied by the battery,
is the power produced
by the wind turbine, and
is the electrical power
absorbed by the load, all power variables being
measured in kW. Furthermore,
,
,
,
(2)
,
,
(3)
where
,
0 and
,
0 denote the battery
discharging and charging powers, respectively, and
,
0 and
,
0 denote the purchased and
sold powers, respectively. Since imbalance charges
are inflicted only for violations of the planned power
exchanged at the PCC of a given percentage,
is
further re-elaborated as:
,
,
∆
,
(4)
,
,
∆
,
(5)
where
,
,
(with
,
,
,
0)
denotes the main component of
, that is allowed
to deviate at most of 20% with respect to the
planned power, and ∆
,
and ∆
,
account for
possible additional deviations that result in
imbalance charges being inflicted. Only one of these
deviation terms at a time can be strictly positive (if
the 20% tolerance is exceeded). This fact can be
ensured since both ∆
,
and ∆
,
are
minimized in the overall optimization problem. In
the best case when such values equal to zero, the
power deviations up to 20% are tolerated without
imbalance costs. To account for load curtailment
penalties, the electrical power
absorbed by the
load is further divided into three parts:
∆
,
∆
,
,
(6)
where
0 is the load demand defined by the load
side, while ∆
,
0and ∆
,
0account for the
positive and negative differences between
and
,
respectively (note that only one of this terms can be
different from 0 at any time instant). Curtailment
penalties are inflicted only if ∆
,
or ∆
,
are
strictly positive. Overall, the power flow balance
equation can be rewritten as follows:
,
,
∆
,
∆
,
,
,
∆
,
∆
,
.
(7)
3.2 State of the Battery Charge
Common simplistic assumptions on the battery
model consider ideal (e.g., constant)
charge/discharge efficiencies. However, the internal
resistance of the battery changes with respect to
State Of Charge (SOC) level, thereby increasing the
internal losses (and reducing efficiency).
Accordingly, a more realistic setting requires that
the efficiencies be assumed dependent on the SOC
levels, which ultimately results in a nonlinear model:
,
,
(8)
where
is the SOC at time step [%],
and
are the discharge/charge efficiency functions,
respectively,
is the battery capacity [kWh], and
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
248
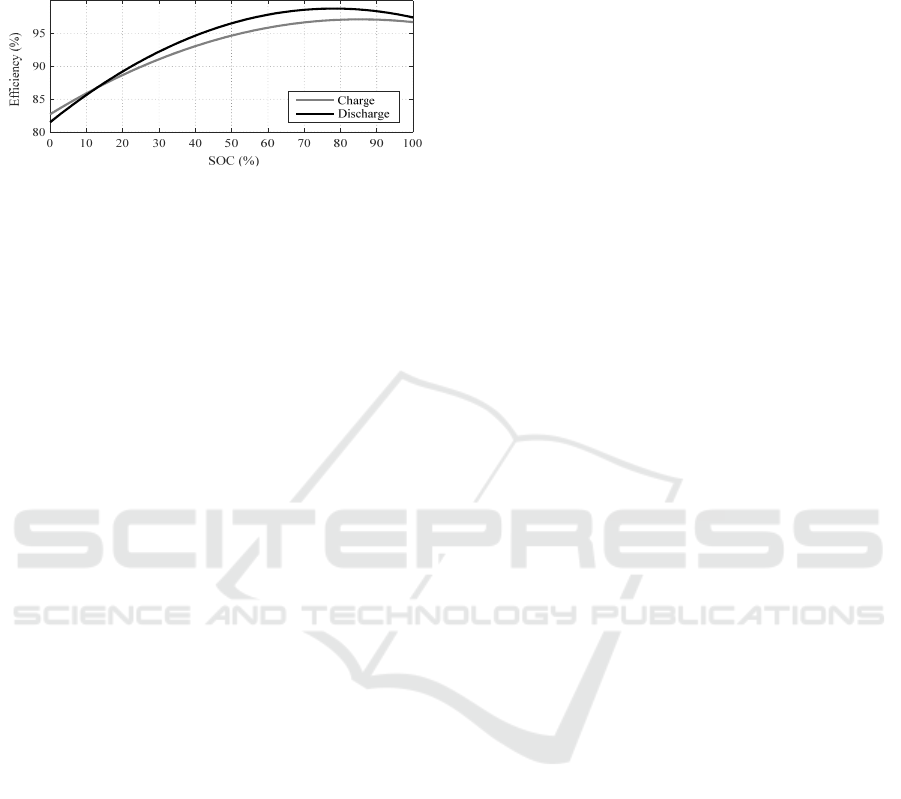
is the sampling time. For simulation purposes the
quadratic efficiency functions shown in Fig.
2 have
been employed.
Figure 2: Typical battery efficiency curves.
4 MPC BATTERY CONTROL
4.1 Output Prediction
In the MPC setting the control optimization is
performed over a given future time horizon, and,
according to the receding horizon principle, only the
first control action is applied and the optimization is
repeated at the next time step. The optimization
requires the prediction of the output based on future
control moves over the considered time horizon.
Referring to equation (7) we will set the output
variable to
,
and define the control
variable
as:
,
,
∆
,
,
∆
,
∆
,
∆
,
(9)
Denoting with N the prediction and control horizon,
let
…
be the vector of future
outputs and
the corresponding vector of
predictions. Let also
…
be the
vector of future control actions, and
…
the vector of (predicted) future
disturbances in the microgrid where
,
being the expected load power and
the wind power. Then, one can express the
output prediction as:
(10)
where
and
are suitable coefficient matrices.
As for wind power that is the main source of
uncertainty for the control design problem, an
ARIMA (2,1,1) model, tuned with the Recursive
Maximum Likelihood (RML) method, has been used
to forecast the wind speed over the short-term
prediction horizon. Then, the wind speed predicted
values have been converted into wind power values
using an empirical speed-to-power curve. For
medium-term (i.e., day-ahead) power production,
similar to (Teleke et al., 2010), the day-ahead power
production (with respect to which the imbalance
charges are calculated) is not actually estimated.
Rather, the prediction process is emulated by
artificially adding a white Gaussian noise to the
exact production profile. Then, the generated
prediction profile is subject to have 20% of
prediction error.
4.2 MPC Formulation
As discussed in the following, the energy
management problem can be formulated as a QP
problem of the form:
min
=
A
Subject to:
(11)
Note that expression of
and
and
are interchangeable.
The cost function includes several additive
terms, that address different objectives:
(12)
where
,
,
,
, and
, are weight
coefficients and
,
,
,
, and
, are cost terms
that account for battery power smoothing, economic
benefit due to electricity trading, imbalance charges,
load curtailment penalties, and control feasibility,
respectively. All the terms in (6) are expressed as
quadratic functions of the decision variables
. A
detailed explanation of each of the mentioned terms
together with hard constraints related to the
operating conditions of the various components is
given in the next sub-sections.
4.3 Cost Function Terms
In this section, the construction of each cost function
term is introduced and it turns out that the
expression of these terms falls into the quadratic
form (11), upon observing that all related variables
are either decision variables included in
or
functions of
.
Battery Power Regularization (
)
The cost function term
enforces the smoothness
of the battery power:
∆
(13)
where ∆
denote the deviation between
consecutive control moves regarding the battery
MPC-based Management of Energy Resources in Smart Microgrids
249

charging and discharging.
∆
,
,
,
,
∆
,
∆
,
(14)
Energy Cost Minimization (
)
This term accounts for the economic benefit
resulting from electricity trading with the grid
(disregarding monetary penalties):
,
,
(15)
where
,
and
,
account for the overall costs
related to selling and buying energy, respectively.
Notice that
,
is a negative term that represent
earning derived from selling electricity to the grid.
Imbalance Charges Minimization (
)
Penalties are inflicted if
exceeds the interval
,
,
at time step i, where
,
and
,
are the reference power profile and its
maximum allowed deviation, respectively. The
power flow towards the grid is divided into a
nominal component
,
,
and a
deviation ∆
,
∆
,
. The nominal power is
constrained to take values within the penalty bounds.
On the other hand, an additional term
of the cost
function introduces a soft constraint on the deviation
from the boundaries∆
,
as follows:
∆
,
∆
,
(16)
In this way, what is minimized is not the distance
from the reference power, but that from the
boundaries related to imbalance charges, thus
allowing the system to exploit the full range allowed
by the contract stipulated with the utility operator.
Load Curtailment Penalty (
)
To maximize the economic profit and reduce
imbalance charges, the control system has also the
option to modify the request from the load side
within some flexibility bounds arranged with the
user. Included in such arrangements is a penalty
imposed for not fulfilling the load side demand. Let
and
be 1 × N vectors representing the
curtailment penalty tariffs over the prediction
horizon (different tariffs are generally applied
depending on the sign of the deviation with respect
to the nominal load demand). In any case, the load
side receives Then, the cost function term
is
constructed as:
∆
,
⋮
∆
,
∆
,
⋮
∆
,
(17)
Feasibility Term (
)
In practice, only one control action regarding the
charging and discharging variables is applicable at a
given time. To ensure this property, a soft constraint
is enforced by introducing an additional cost term
related to feasibility which is minimal when at least
one of the two equals zero:
,
,
…
,
,
⋮
,
(18)
4.4 MPC Constraints
This section presents the considered constraints. As
with cost function terms, with suitable choices of the
coefficient matrices, the constraints can be rewritten
in the general form of linear inequalities as in (11).
Maximum Battery Power
Beside being non-negative, the ESS charging and
discharging powers are also bounded by the
maximum charging (
,
and discharging power
(
,
), respectively.
0
,
,
∀1,…,
0
,
,
∀1,…,
(19)
Bounds on the state-of-charge
Constant charging and discharging efficiencies over
the prediction horizon have been employed to
compute the constraints on the battery energy. Such
constant efficiencies are computed as functions of
the state of charge value at the previous step,
:
1
,
,
∀1,…,
(20)
where
is the minimum capacity of the
battery [%],
is the maximum capacity of the
battery [%],
̅
and
̅
/
.
Sign of the Power Flow Terms at the PCC
As already discussed (see equations (3)-(5)), the
purchase
,
∆
,
and the sale
,
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
250

∆
,
components are both assumed non-negative.
0
,
∆
,
∀1,…,
0
,
∆
,
∀1,…,
(21)
Allowed Range for the Power Flow at the PCC
As mentioned in MPC formulation section, the
following hard constraint on the nominal power sold
to the grid is applied:
,
,
,
,
,
,
∀1,…,
(22)
Load flexibility range
Given the upper and lower deviation terms from the
load reference ∆
,
and ∆
,
defined for each
time step , the MPC computes the optimal solution
according to the following constraints over all the
prediction horizon:
,
∆
,
,
∆
,
∀1,…,
(23)
where
,
is the nominal electrical power
consumed by the load, i.e. the load demand.
5 SIMULATION RESULTS
A set of 3 experiments has been carried out to
emphasize different aspects of the optimization
problem on 5 different microgrid settings, with 10
different objective functions.
5.1 Scenarios and Experiments
Unless otherwise stated, the parameter values listed
in Table
1 are adopted in all the simulations, where
,
, and
are the penalty tariffs related to
curtailment penalties for excess energy, insufficient
energy and imbalance charges, respectively, and
are the parameters for the MPC execution (the
prediction/control horizon and the sampling time,
respectively), and ∆
is the level of load flexibility.
Notice that, for simplicity, we assumed the
imbalance charge tariff, the curtailment penalty tariff
and the load flexibility range to be constant,
although the presented approach remains valid even
if those quantities are allowed to change over time.
In this work, a typical load demand is studied with
two peak consumption periods and the profile varies
in hourly manner. Correspondingly, a typical daily
electricity tariffs follows a similar trend as the load
profile. Notice that the purchase tariff is always
higher by 19€/MWh compared to the sale tariff.
To analyze the performances achievable by taking
advantage of the load flexibility and by employing
an ESS, we considered 5 different microgrid settings
(listed as scenario S0 to S4 in Table
2).
Table 1: Simulation parameters.
Parameter Unit
Value Parameter Unit Value
,
MW 1
€/MWh 40
,
MW 1
€/MWh 90
[%] 20
€/MWh 90
[%] 100
- 20
MWh 5
m
in 15
∆
[%] 10
Table 2: Microgrid scenarios.
Scenario RES Load flexibility ESS
S0 NO NO NO
S1 YES NO NO
S2 YES YES NO
S3 YES NO YES
S4 YES YES YES
To represent the condition where the RES is not
available (scenario S0), variable
is set to 0 for all
i. Similarly, to model the absence of the ESS
(scenarios S0, S1, and S2), we set
0. Finally, ∆
0% in scenarios S0,
S1, and S3, to account for the exact load following
requirement. Notice that for scenarios S0 and S1 no
actual control choice has to be taken (and therefore
no optimization is carried out), since the load
requirement must be exactly followed and there is
no ESS to manage. In these cases, all the energy
required by the load at each period must be provided
by the grid (or the wind power generator). These
scenarios are included for reference purposes only.
Regarding the cost function weights, a wide
variety of combinations have been analyzed (see
Table 3)
to study the sensitivity of the control results
to these tuning knobs. In all considered settings the
control feasibility weight has been set to a high
value (
10
), as feasibility is a critical
requirement of the system. Conversely, the battery
power regularization term has been set to a small
value (
1), since in this paper the focus is on
the monetary optimization problem.
Various combinations of the other 3 weights
(
,
and
) are introduced to emphasize
different goals. More specifically, we can identify 3
specific goals, namely Energy Profit (EP), Market
MPC-based Management of Energy Resources in Smart Microgrids
251
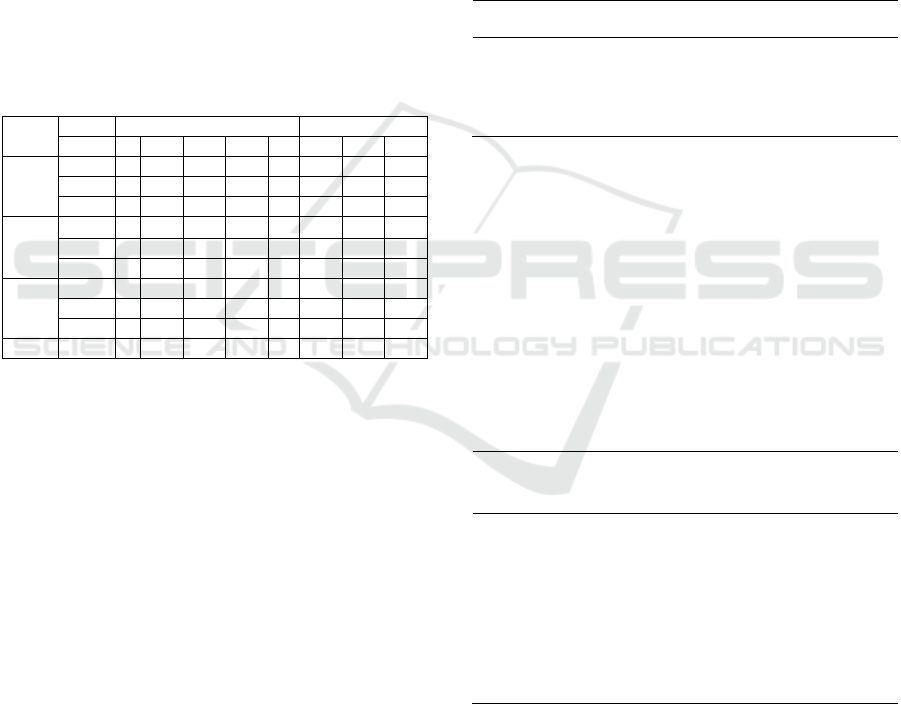
Committment (MC), and User Comfort (UC). Notice
that in the short-term simulation period (i.e., 2-
month period) the capital and battery degradation
costs are neglected for simplicity. The EP goal aims
at maximizing the revenues resulting from
purchasing/selling electricity from/back to the grid,
and is achieved by setting a high value for
. MC
is associated to the energy trading arrangements
made with the utility. Consequently, minimizing the
imbalance charges optimizes the MC (high
).
Finally, UC is maximized if the load request is
perfectly tracked by the control system. Therefore, it
is pursued by reducing the load curtailment penalties
(high
). For simplicity, goals EP, MC and UC
have been discretized into 3 levels (low, medium,
high), so that many combinations can be constructed
to account to different overall objectives of the
microgrid management.
Table 3: Cost function weight tunings.
Group
Weigh
t
parameters goals
tuning
EP MC UC
1
W1 1 1 1 200010
low low high
W2 1 1 250 1 10
low high low
W3 1 2000 1 1 10
high low low
2
W4 1 1 250 200010
low high high
W5 1 2000 1 200010
high low high
W6 1 2000 250 1
10
high high low
3
W7 1 250 10 200010
med med
high
W8 1 250 250 250 10
med high med
W9 1 2000 10 250 10
high med med
4 W10 1 250 10 250 10
med med
med
To represent the most significant combinations,
the weight settings are aggregated in 4 different
groups. Group 1 refers to mono-objective problems,
while 2- and 3- objective cost functions are
minimized in Groups 2 and 3, respectively. Notice,
in particular, that for each case of Group 3 a high
weight value is assigned to one of three goals while
the remaining two are associated with medium
weight values. Finally, Group 4 reports a balanced
weighting designed to (approximately) minimize the
overall cost.
The experiments performed are listed below:
1) Comparison between different scenarios
2) Role of the cost function weights
3) Impact of load flexibility
5.2 Experiment 1: Comparison
between Different Scenarios
A 2-month long simulation has been carried out for
all scenarios. Weight tuning W10 is employed,
where appropriate (scenarios S2, S3, and S4).
Table
4 presents the corresponding costs.
Apparently, the use of the RES can reduce the total
cost by an order of magnitude in the given settings
(compare scenarios S1-S4 with S0).
Notwithstanding the low round-trip efficiency of the
battery (ratio of total energy discharged from ESS
divided by total energy charged to ESS) and the
inclusion of load curtailment penalties, scenario S4
provides the best total cost of the system with a
15.2% improvement over S3, a 24.3% improvement
over S2 and 32.6% over S1. Negative entries in
Table
4 represent earnings derived from selling
electricity to the main grid.
Table 4: Results for Experiment 1.
Scenario
Total
cost [€]
Curtailment
penalty [€]
Imbalance
charge [€]
Energy
trading [€]
S0
359960 0 0 359960
S1
56722 0 38524 18197
S2
50569 22062 31343 ‐2836
S3
45065 0 25569 19496
S4
38231 22101 19151 ‐3021
5.3 Experiment 2: Cost Function
Weights
This experiment is aimed at evaluating the behavior
and performance of the control system for different
combinations of the cost function weights (refer to
Table 3), resulting in different levels of achievement
regarding the mentioned EP, MC, and UC goals. All
simulations refer to scenario S4. Results are reported
in Table
5.
Table 5: Results for Experiment 2.
Weight
tuning
Cost (€)
load
curtailment
imbalance
charges
electricity
trading
total
W1 0 24940 20978 45918
W2 31023 17322 2288 50633
W3 32699 41907 ‐26198 48409
W4 16415 19556 9897 45868
W5 19005 43357 ‐15630 46733
W6 32069 17634 ‐4432 45271
W7 0 25709 19634 45342
W8 28063 17483 1408 46954
W9 32699 29576 ‐20908 41367
W10 22101 19151 ‐3021 38231
Notice that, if the system focuses only on UC
(e.g., W1), the curtailment penalty is 0 € as the load
request is completely fulfilled. On the contrary, the
imbalance charges are always greater than 0,
because the power and energy limitations of the
ESS, as well as the inevitable short-term prediction
errors on the wind power production, do not always
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
252

allow a tracking of the expected production profile
within the acceptable tolerance levels.
5.4 Experiment 3: Load Flexibility
A further analysis has been carried out to ascertain
the impact of the load flexibility level on the control
performance. To this aim, parameter ∆
(i.e., level
of load flexibility) is varied in the range 0 ÷ 10 % of
the load demand. Actual short-term wind prediction
is employed. Weight tuning W10 has been used for
this analysis. The results are summarized in Table 6
that shows an improvement in the total cost and
average electricity cost when increasing the load
flexibility. Load shedding during peak hours is an
obvious reason for this improvement.
Table 6: Effects of load flexibility.
Load flexibility
range [%]
Total cost
[€]
Provided/expected
energy [%]
Rate
[€/MWh]
0 45065 100.00 12.40
2 43585 98.61 12.17
4 42120 97.26 11.92
6 40598 95.96 11.64
8 39390 94.68 11.45
10 38231 93.45 11.26
The load flexibility appears to play a role similar
to the ESS in rebalancing the energy in the system,
by increasing or decreasing the load profile, in order
to reduce the imbalance charges and the energy
trading cost. The larger the load flexibility level, the
greater the possibilities to enact load shedding and
energy balancing strategies in the system. A 17.9%
difference in terms of the total cost is observed
between the worst (i.e., 0% load flexibility) and the
best case (10% load flexibility).
6 CONCLUSIONS
In this paper, a model predictive control approach to
the optimal energy management and control in
microgrids is proposed, considering ESS (batteries),
RES (wind farms), smart flexibile buildings and a
connection to the main grid. A comprehensive and
unified modelling framework is proposed to deal
with realistic battery models, power tracking,
imbalance charges, curtailment penalties, wind
power prediction, under different objectives,
operational constraints and scenarios. In particular,
the paper shows how the proposed unified
framework can address completely differrent
scenarios (e.g., with or without RES, ESS, and load
flexibility), and demonstrates how different
optimization objectives can be pursued by
manipulating specific design parameters.
Future research directions will include the
improvement of the prediction of the RES
production, since this appears to be a major factor
that influences the overall performance, and the
automatic setting of the MPC main parameters
(namely the cost function weights). Furthermore, the
same comprehensive approach discussed here will
be extended to a distributed scenario, with multiple
loads, ESS’s and RES’s, in a distributed MPC
framework.
REFERENCES
Accetta, G., Piroddi, L., and Ferrarini, L. (2012). Energy
production estimation of a photovoltaic system with
temperature-dependent coefficients. 2012 IEEE Third
International Conference on Sustainable Energy
Technologies (ICSET).
Clarke, W. C., Manzie, C., and Brear, M. J. (2016). An
Economic MPC Approach to Microgrid Control. In
Control Conference (AuCC), 2016 Australian.
Ferrarini, L.and Mantovani, G. (2013). Modeling and
control of thermal energy of a large commercial
building, IEEE International Workshop on Intelligent
Energy Systems (IWIES).
Ferrarini, L., Mantovani, G., and Costanzo, G. T. (2014).
A Distributed Model Predictive Control approach for
the integration of flexible loads, storage and
renewables. 2014 IEEE 23rd International Symposium
on Industrial Electronics (ISIE).
Gu, W., Wu, Z., and Yuan, X. (2010). Microgrid
economic optimal operation of the combined heat and
power system with renewable energy. IEEE PES
General Meeting.
Mantovani, G.and Ferrarini, L. (2015). Temperature
Control of a Commercial Building With Model
Predictive Control Techniques. IEEE Transactions on
Industrial Electronics, 62(4).
Nemati, M., Braun, M., Tao, L., Mueller, H., Bennimar,
K., and Tenbohlen, S. (2015). Optimization of
microgrids short term operation based on an enhanced
genetic algorithm. In PowerTech, 2015 IEEE
Eindhoven.
Parisio, A., Rikos, E., and Glielmo, L. (2014). A model
predictive control approach to microgrid operation
optimization. IEEE Transactions on Control Systems
Technology, 22(5).
Silvente, J., Kopanos, G. M., Pistikopoulos, E. N., and
Espuña, A. (2015). A rolling horizon optimization
framework for the simultaneous energy supply and
demand planning in microgrids. Applied Energy, 155.
Teleke, S., Baran, M. E., Bhattacharya, S., and Huang, A.
Q. (2010). Optimal Control of Battery Energy Storage
for Wind Farm Dispatching. IEEE Transactions on
Energy Conversion, 25(3).
MPC-based Management of Energy Resources in Smart Microgrids
253
