
A Study on Automating Rolling-stock Maintenance in the Rail Industry
using Robotics
Randika K. W. Vithanage, Colin S. Harrison and Anjali K. M. DeSilva
Glasgow Caledonian University, Glasgow, U.K.
Keywords:
Industrial Robots, Automated Maintenance, Sensor Fusion.
Abstract:
Maintenance cost of United Kingdom’s rail rolling stock is a substantial portion of its whole life costs. There-
fore, it is vital to conduct these maintenance tasks in an efficient and cost-effective manner to minimize op-
erational costs while maximizing safety, quality, and consistency of service. The introduction of robotics and
other intelligent mechanisms to maintenance processes would be an ideal solution to these challenges. Hence,
this research suggests introducing autonomous maintenance systems equipped with industrial robots to tasks
within the railway system, specifically for rolling-stock maintenance. The paper summarizes on-going and
future work of a case-study conduct in conjunction with a UK railway operator.
1 INTRODUCTION
1.1 Maintenance in General
Maintenance can be defined as a task or series of tasks
which protect or reinstate the anticipated condition
of a system and these tasks include all technical, ad-
ministrative and managerial actions taken (M
´
arquez,
2007). Further, maintenance is categorized into three
major groups: preventive maintenance, scheduled
maintenance and unforeseen maintenance (Parker and
Draper, 1998). Proper maintenance of infrastructure,
machines, systems and other resources are essential
for any industry to provide a safer, reliable and re-
silient output (M
´
arquez, 2007). In general, mainte-
nance tasks are costly and on the other hand, mainte-
nance could be hazardous; being accountable for 25-
30% of fatalities in the United Kingdoms manufactur-
ing industry (Fraser, 2014)(HSE, 1999).
1.2 Involvement of Robots in
Maintenance
Robots that are designed for maintenance tasks can
be found in many different applications; especially
in the nuclear industry there are robots deployed for
inspection, scheduled maintenance, disaster manage-
ment and rescue operations (Pegman et al., 2006)(Na-
gatani et al., 2013)(Lee et al., 2013). Some of the
other applications are semi-automated highway main-
tenance tasks such as crack sealing, automatic warn-
ing corn dispensing, data collection and lamp post
maintenance (Lasky and Ravani, 2000)(Chan et al.,
2015)(Armada et al., 2005). Further, robots des-
ignated for maintenance can be seen in the elec-
tric power distribution sector for maintenance of live
wires (Kochan, 2001)(Maruyama, 2000), in facil-
ity management field to clean glass-wall of high-
rise buildings (Tokhi et al., 2007)(Onori and Kochan,
2005), and in the railway industry to lay railway
tracks, rail grinding and ongoing research in robotic
train front-end cleaning (Villedieu and Francois,
1995)(Farnsworth and Tomiyama, 2014)(Moura and
Erden, 2017)(Tomiyama et al., 2017). Due to the
high levels of dexterity required, and a limited abil-
ity to cope with non-rigidly organized environments,
the majority of robots currently deployed in the main-
tenance sector are teleoperated, remotely controlled
or require close human supervision (Farnsworth and
Tomiyama, 2014). Further, due to the complex nature
of the maintenance tasks these robots need to be heav-
ily customized and specially designed for a particu-
lar task and therefore, lack the flexibility and recon-
figurability common to industrial robots. Also, these
fixed robotic and hard automation systems have large
initial investments compared to systems based on
standard industrial robots (Gupta and Arora, 2009).
278
Vithanage, R., Harrison, C. and DeSilva, A.
A Study on Automating Rolling-stock Maintenance in the Rail Industry using Robotics.
DOI: 10.5220/0006410702780283
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 2, pages 278-283
ISBN: Not Available
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
1.3 Application of Industrial Robots
Nationally and Internationally
Automated work-cells fitted with industrial robots are
ubiquitous in the manufacturing sector, due largely
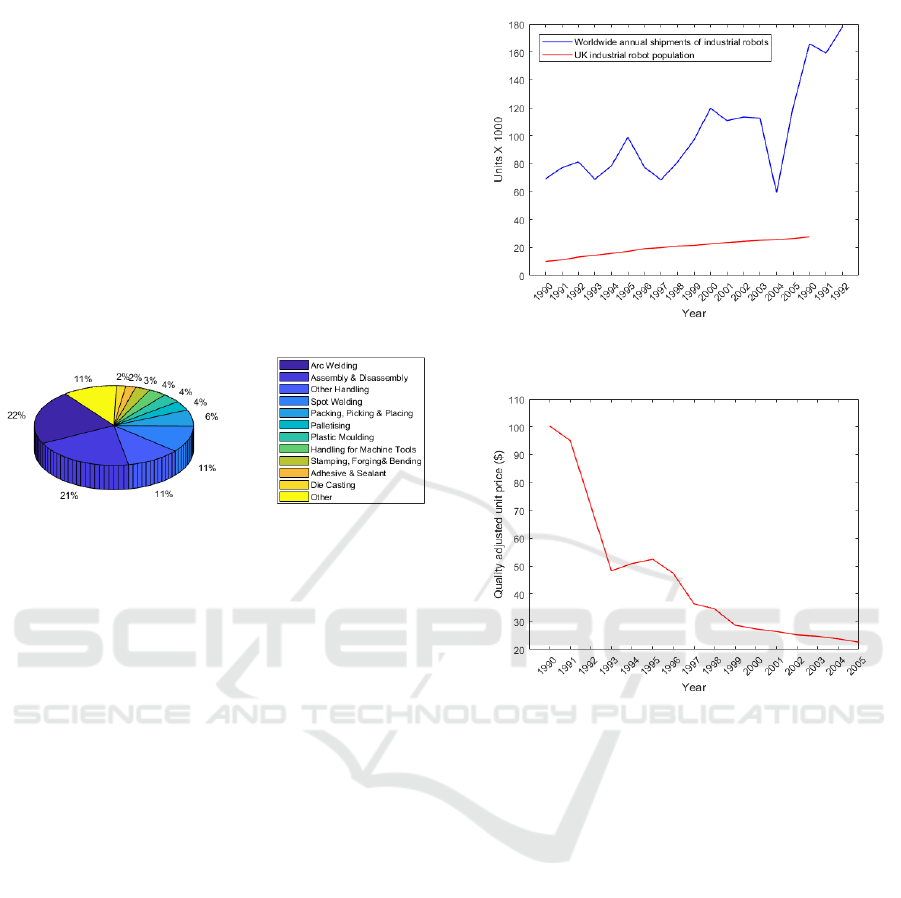
to the nature of task repetition. The total percentage
of robots installed in direct production-related tasks
amounts 78% of the total robots installed in the UK
see figure 1 (BARA, 2012). Though industrial robots
are commonly found in the manufacturing sector, op-
portunities available for introducing such systems into
maintenance are more challenging and this is mainly
caused due to lack of available technologies to cope
with complexities linked to maintenance tasks.
Figure 1: UK robot application by process.
According to the World Robotics 2014 data, an-
nual shipments of industrial robots have increased
over time despite the drastic drop in 2009 which was
due to world’s economic recession see figure 2 (IFR,
2015). Further, as shown in figure 2 it can be seen
that the same trend exists within UK (BARA, 2012).
Therefore, it is evident that industrial robots are be-
coming increasingly popular nationally and interna-
tionally. Over the period of 15 years from 1990, the
mean quality-adjusted unit price of industrial robots
in the UK, US and four other EU countries has
dropped down by nearly 80% - refer figure 3. There-
fore, robots are becoming more popular among indus-
trial practitioners perhaps due to their reduced prices
and improved quality, hence allowing shorter payback
periods.
1.4 Railway Industry in the United
Kingdom
According to the Office of Rail and Road, in 2014 UK
shows growth of passenger rail journeys by 143% and
rail has carried 10% more freight compared to 2004.
Furthermore, in 2014, over 1.6bn passenger journeys
were made see figure 4 (ORR, 2014). Also, the UK
railway industry can be identified as one of the lead-
ing factors in the transport sector and the economy be-
ing responsible for 12bn spends a year (UKTI, 2014).
Therefore, UK rail is among the top most rapidly
growing industries. Due to rapid expansion and in-
creased competition, companies associated with the
Figure 2: Industrial robots over time (World Robotics and
BARA Robot Facts).
Figure 3: Price of industrial robots over time (IFR 2006).
railway industry progressively drive towards continu-
ous improvement of existing facilities, resources and
processes. That said, optimizing the usage, inspec-
tion, and maintenance of train fleets in a cost-effective
manner remains a key challenge for the sector. Reduc-
ing inspection and maintenance costs, whilst main-
taining/improving safety is a priority for not just train
operating companies, but the rail industry both na-
tionally and internationally. According to the Value
for Money Study published in 2011 May, which was a
joint assignment by the Department for Transport and
the Office of Rail Regulation Network, rolling stock
maintenance and financing has been estimated to be
1.78bn a year which accounts for 15% of total UK
railway costs (McNulty, 2011).
Rolling stock maintenance could be clustered, dis-
tributed over local contractors and encourage them
to be specialists in the field, and apply techniques
to achieve increased productivity through automation
(McNulty, 2011). Also, it has been identified that in-
creased automation is a key objective in the Rail Tech-
nical Strategy 2012 and is expected to obtain opera-
tional cost benefits by intelligent maintenance tech-
A Study on Automating Rolling-stock Maintenance in the Rail Industry using Robotics
279
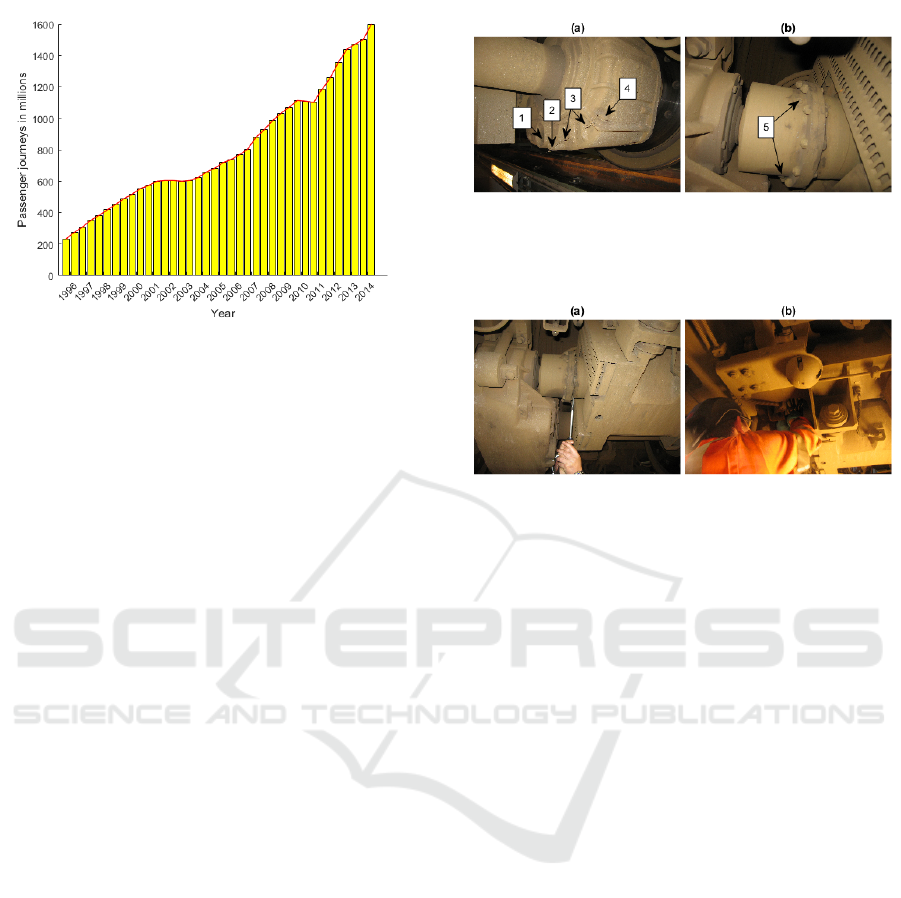
Figure 4: UK’S overall passenger railway journeys (ORR -
2014).
niques (TSGL, 2012). Further, ”Robotics and Au-
tonomous Systems (RAS)-2020” has identified that
UK could save 1tn over the following 20 years by
applying RAS to the transport sector (RAS, 2014).
Therefore, the introduction of autonomous systems in
order to eliminate or minimize human intervention in
maintenance processes would be an ideal technique
and it can be viewed that UK railway industry is in the
right stage to invest in automation (RRUKA, 2015).
1.5 Motivation and Scope of the Study
Based on above evidence it would be highly beneficial
to introduce off the shelf industrial robots for rolling
stock maintenance. Therefore, this research seeks a
set of advanced skills and techniques to introduce in-
dustrial robots into autonomous maintenance appli-
cations in the railway industry through identification
of viable maintenance tasks for automation. Further,
this research will focus on adapting automation tech-
niques in existing manufacturing to maintenance pro-
cesses and address the key challenges in-cooperated
with such automation exercises. The scope of this
project is to examine the feasibility of introducing
off the shelf industrial robots to automate ”Siemens
Class 380 Desiro” power bogie gear fluid changing
task and develop advance sensing modules/algorithms
required for robot manipulation in maintenance en-
vironments. Shown in figure 5 is the main gearbox
of Siemens Class 380 illustrating wire lock, fill/drain
plugs and inspection window, and the curved tooth
coupling cover of Class 380 power bogies. Techni-
cians have to drain the oil out from both main gearbox
and curved coupler and refill them with new oil after
inspecting for the presence of water in oil or any metal
debris in the magnetic filler caps. All the guidelines
for this process are provided in detailed maintenance
procedures provided by the manufacturer.
Figure 5: (a) Class 380 main gearbox where (1) Inspec-
tion window, (2) Drain plug, (3) Wirelocks and (4) Filler
plug, and (b) Curved coupling cover Class 380 where (5)
Drain/filler plugs.
Figure 6: (a) and (b) Technician performing Class 380
curved coupler oil change.
Both these maintenance processes involve com-
plicated practices such as removal and application of
wire-locks in the main gearbox and locating the po-
sition of drain/filler plugs of curved coupler since it
rotates as the train drives. These processes should be
relatively straightforward to an experienced technical
person but are quite challenging for an automated sys-
tem due to lack of positional repeatability. Further,
these items are located in difficult to reach positions
(refer figure 6) where technicians need to execute the
bulk of the work related to these maintenance tasks
in unergonomic environments which may pose poten-
tial health and safety hazards, for example, oil spill
slip/trip risks. Therefore, the team has identified this
as one of the tasks to be explored further to introduce
automation.
2 WORKFLOW STRATEGY AND
EXPERIMENTAL SETUP
This study consists of several stages. At the initial
phase, as a part of the preliminary feasibility study,
data collection and computer-based simulations will
be conducted. The approach includes the develop-
ment of physically modelled off line tasks in a lab-
oratory setting to replicate the automation context.
A fully functional 6 axis articulated industrial robot
- Fanuc LR Mate 200iD will be used for the mock
tests to gain detailed knowledge of the task prior to
implementation and how difficulties can be overcome
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
280
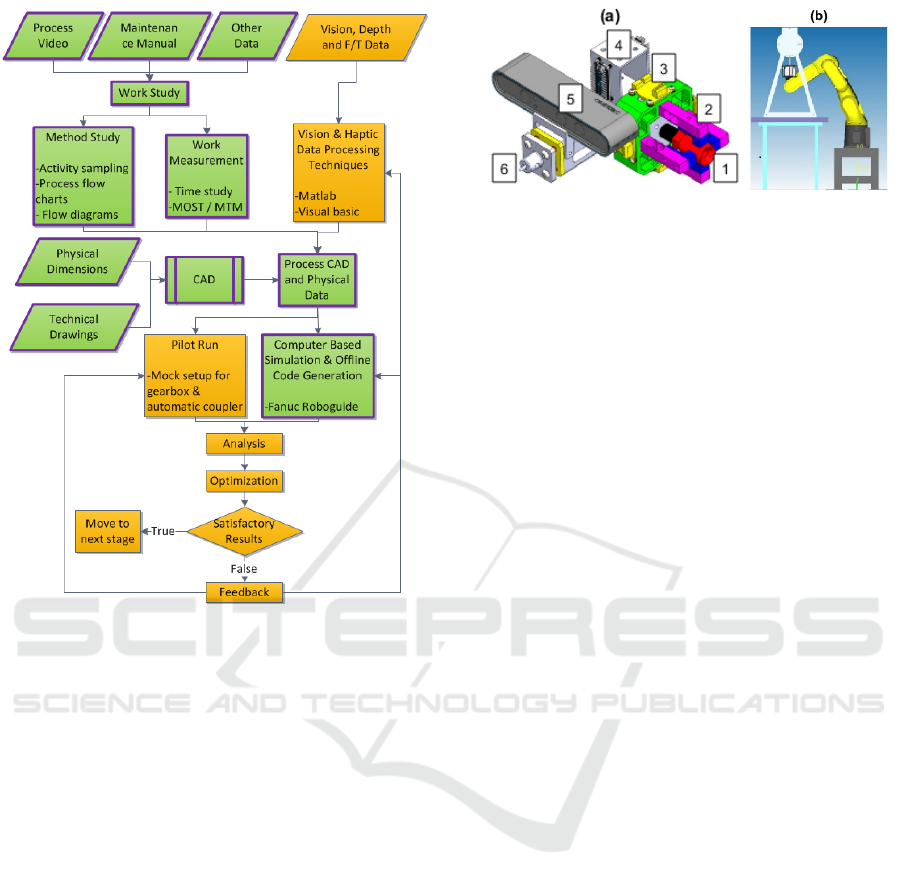
Figure 7: Fundamental workflow of the project.
with reduced financial and technical risk. The funda-
mental workflow of this project is shown below and
visualized in green are the actions to be taken dur-
ing the phase 1 which are currently ongoing (fig-
ure 7). As it can be seen project steps will take a
cyclic pattern to optimize the output to the desired
level. Work study data collection is currently under-
way and these data will be collected by observations
and video analysis of the actual maintenance tasks,
referring to maintenance instructions and communi-
cating with expertise in the field such as technicians,
engineers, and managers at Abelio Scotrail, Shields
Depot, Glasgow. Data will be processed using stan-
dard work study methods: Method study and Work
measurement and compared with that by Farnsworth
2014 (Farnsworth and Tomiyama, 2014). Also, key
geometric details and critical dimensions of the parts
to model the experimental setups will be recorded in
parallel to work study data collection.
2.1 Prototype Design and
Computer-based Robot Simulations
Computer aided designs of scaled-down Class 380
curved gear coupler and end of arm tool were mod-
elled as shown in figure 8. It is been assured that the
Figure 8: (a) Proposed CAD of end of arm tooling where
(1) Floating tip to detect precise location of guide pin, (2)
4 X Micro load cells, (3) 4 X Wheatstone bridges, (4) 2 X
Arduino Nano, (5) ToF and RGB sensors and (6) Tip to in-
spect electric connectors, and (b) Fanuc Roboguide virtual
work cells designed for Class 380 curved coupler.
mock coupler contains key physical features required
to conduct the pilot test. The final design is to be
confirmed based on the input from Abelio-ScotRail
expertise, the output of computer-based simulations
and manufacturability. Rapid prototyping and CNC
milling will be utilized for the fabrication. Vision
and force sensing modules are incorporated to the
robots end of arm tooling (EOAT) and equipped with
a micro-controller to process machine learning algo-
rithms expected to develop in future. Further, it is
aimed to enhance tools reconfigurability with auto-
matic tool changing techniques. The software pack-
age ROBOGUIDE provided by Fanuc has been used
to conduct computer-based simulation of the process
and experimental setup. Roboguide is an advanced
simulation which allows users to model robotic work-
cells, process verification, offline code generation and
robot motion confirmation such as collision detec-
tions, program verification, cycle time and payload
validation. Further, this software permits users to
program robots using a flexible programming lan-
guage similar to Pascal (KAREL) other than tradi-
tional teach pendant programming.
Illustrated in figure 9 is a conceptual work-cell of
the train gear fluid changing platform designed us-
ing Roboguide software for a preliminary feasibility
study. The virtual work-cell would assist the team
members to visualize robot positioning inside the ex-
isting service bay, design and allocation of multiple
end of arm tooling (EOAT), set up of robotic vision
systems, placement of force-torque sensing equip-
ment, oil discharging and dispensing methods and
other factors such as health and safety requirements.
2.2 Proposed Sensing Model
In order to cope with complexities and moderate lev-
els of disorder commonly found in maintenance envi-
ronments, the robot should be able to sense its envi-
ronment. Therefore, this research suggests a combi-
A Study on Automating Rolling-stock Maintenance in the Rail Industry using Robotics
281

Figure 9: Preliminary work-cell designed by Roboguide
Class 380 gear oil change platform.
nation of both vision and haptic data processing tech-
niques to bring up a smart sensing methodology. A
time of flight and a RGB sensor is proposed to cap-
ture depth and intensity data of the environment that
will be used for the initial positioning of the robot.
The precise manipulation of the robot is supposed to
achieve through force sensing module equipped with
four micro load-cells coupled to Wheatstone bridges
- see figure 8(a). Moreover, both the main gearbox
and curved coupler are located in dirty and difficult to
access positions, and it is quite difficult to precisely
control parking position of the train itself. Therefore,
proposed system should be robust to noise and accom-
modate the high level of anticipated tolerances.
3 RESULTS
Object identification and localization methodologies
are developed at this stage of the research by fusing
ToF and RGB sensors. Conventional edge detection
techniques didnt prove to be successful in detecting
objects due to the high level of environmental noises
presented, geometric ambiguities and surface charac-
teristics of the targets. Therefore, a template matching
algorithm which encapsulates geometric and intensity
data is developed to detect electrical pin candidates of
the automatic train coupler. The developed method-
ology is robust to rotation, ambient light and surface
ambiguities, and able to detect all electrical connec-
tors effectively within the anticipated work envelope
- see figure 10. Further, detection and localization of
the drain/filler plugs of the curved coupler and main
gearbox is equally challenging and advanced machine
learning algorithms are used to detect and localize the
said targets refer figure 11. Moreover, the images
used in validation phase are captured in normal work-
ing conditions without the aid of any artificial lights
or filtered backgrounds.
Figure 10: Successfully identified and localized electrical
connector of the Siemens Class 380 Scharfenberg train cou-
pler.
Figure 11: Identified drain/filler plugs of curved coupler (1
st
row), identified filler plug of the main gearbox (2
nd
row)
and identified drain plug of the main gearbox (3
rd
row).
4 CONCLUSION
Not to overlook the rapid progress made by recent in-
dustrial robots and sensory equipment, the majority
of present day robots in the manufacturing industry
manipulate in rigidly organized worlds. In most in-
stances these highly organized environments are cre-
ated by the precise position of the parts, implemen-
tation of jigs and fixtures to guide tools, creating
clear, clean and bright environments. The introduc-
tion of such techniques entirely to the maintenance
sector is not straightforward and this could be viewed
as one of the primary hindrances to implement fully
autonomous systems equipped with industrial robots
in maintenance tasks. Therefore, in a wider scope,
this research pursues a set of advanced sensor (RGB,
depth, and force) fusion techniques to create a hy-
brid sensing model that could be coupled with indus-
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
282

trial robots enabling them to cope with low-moderate
levels of disorders commonly found in maintenance
sectors. More importantly these techniques are lim-
ited to maintenance environments but certainly can be
adapted to manufacturing industry as well.
REFERENCES
Armada, M. A., Tavakoli, M., Zakerzadeh, M., Vossoughi,
G., and Bagheri, S. (2005). A hybrid pole climbing
and manipulating robot with minimum dofs for con-
struction and service applications. Industrial Robot:
An International Journal, 32(2):171–178.
BARA (2012). Robot facts 2012. Technical report, British
automation and Robotic Association.
Chan, B., Guan, H., Jo, J., and Blumenstein, M. (2015). To-
wards uav-based bridge inspection systems: A review
and an application perspective. Structural Monitoring
and Maintenance, 2(3):283–300.
Farnsworth, M. and Tomiyama, T. (2014). Capturing, clas-
sification and concept generation for automated main-
tenance tasks. CIRP Annals-Manufacturing Technol-
ogy, 63(1):149–152.
Fraser, K. (2014). Facilities management: the strategic se-
lection of a maintenance system. Journal of Facilities
Management, 12(1):18–37.
Gupta, A. and Arora, S. (2009). Industrial automation and
robotics. Laxmi Publications.
HSE (1999). Hazards during maintenance. http://
www.hse.gov.uk/safemaintenance/. (Accessed on
05/28/2017).
IFR (2015). World robotics 2014. https://ifr.org/img/
uploads/Executive-Summary
WR-Industrial-Robots-
0161.pdf. (Accessed on 05/28/2017).
Kochan, A. (2001). Tele-operated maintenance of live
power lines. Industrial Robot: An International Jour-
nal, 28(4):316–319.
Lasky, T. A. and Ravani, B. (2000). Sensor-based path plan-
ning and motion control for a robotic system for road-
way crack sealing. IEEE Transactions on Control Sys-
tems Technology, 8(4):609–622.
Lee, W., Hirai, M., and Hirose, S. (2013). Gunryu iii: recon-
figurable magnetic wall-climbing robot for decom-
missioning of nuclear reactor. Advanced Robotics,
27(14):1099–1111.
M
´
arquez, A. C. (2007). The maintenance management
framework: models and methods for complex systems
maintenance. Springer Science & Business Media.
Maruyama, Y. (2000). Robotic applications for hot-line
maintenance. Industrial Robot: An International
Journal, 27(5):357–365.
McNulty, R. (2011). Report of the rail value for money
study. Technical report, Department for Transport and
the Office of Rail Regulation.
Moura, J. and Erden, M. S. (2017). Formulation of a control
and path planning approach for a cab front cleaning
robot. Procedia CIRP, 59:67–71.
Nagatani, K., Kiribayashi, S., Okada, Y., Otake, K.,
Yoshida, K., Tadokoro, S., Nishimura, T., Yoshida,
T., Koyanagi, E., Fukushima, M., et al. (2013).
Emergency response to the nuclear accident at the
fukushima daiichi nuclear power plants using mobile
rescue robots. Journal of Field Robotics, 30(1):44–63.
Onori, M. and Kochan, A. (2005). Robot cleans glass roof
of louvre pyramid. Industrial Robot: An International
Journal, 32(5):380–382.
ORR (2014). Rail value for money study — office of
rail and road. http://www.orr.gov.uk/rail/publications/
reports/rail-value-for-money-study. (Accessed on
05/28/2017).
Parker, L. E. and Draper, J. V. (1998). Robotics applica-
tions in maintenance and repair. Handbook of indus-
trial robotics, pages 1023–1036.
Pegman, G., Luk, B., Liu, K., Collie, A., Cooke, D., and
Chen, S. (2006). Tele-operated climbing and mobile
service robots for remote inspection and maintenance
in nuclear industry. Industrial Robot: An Interna-
tional Journal, 33(3):194–204.
RAS (2014). Robotics and autonomous systems - ras 2020.
Technical report, The Knowledge Transfer Network.
RRUKA (2015). Robotics and autonomous systems
for rolling stock maintenance dissemination event
— rail research uk association (rruka). http://
www.rruka.org.uk/events/robotics-2/. (Accessed on
05/28/2017).
Tokhi, O., Zhang, H., Zhang, J., Wang, W., Liu, R., and
Zong, G. (2007). A series of pneumatic glass-wall
cleaning robots for high-rise buildings. Industrial
Robot: An International Journal, 34(2):150–160.
Tomiyama, T., Garc
´
ıa, L. R., Kr
ˇ
slin, A., and Taykaldira-
nian, G. (2017). Systems and conceptual design of a
train cab front cleaning robot. Procedia CIRP, 59:61–
66.
TSGL (2012). Rail technical strategy 2012. https://
www.rssb.co.uk/library/future%20railway/innovation-
in- rail- rail- technical- strategy-2012.pdf. (Accessed
on 05/28/2017).
UKTI (2014). The uk rail industry: A showcase of excel-
lence. Technical report, UK Trade & Investment.
Villedieu, E. and Francois, D. (1995). Vehicle for the auto-
matic laying of a track by a vehicle travelling on said
track and track designed for installation by such a ve-
hicle. US Patent 5,385,102.
A Study on Automating Rolling-stock Maintenance in the Rail Industry using Robotics
283
