
Fault Detection for Heating Systems
using Tensor Decompositions of Multi-linear Models
Erik Sewe
1
, Georg Pangalos
2
and Gerwald Lichtenberg
3
1
PLENUM Ingenieurgesellschaft f
¨
ur Planung Energie Umwelt mbH, Hamburg, Germany
2
Fraunhofer Institute for Silicon Technology ISIT, Application Center Power Electronics for Renewable Energy Systems,
Hamburg, Germany
3
Hamburg University of Applied Sciences, Faculty of Life Sciences, Hamburg, Germany
Keywords:
Fault Detection, Boilers, Heating Systems, Multi-linear System, Tensor Representation.
Abstract:
A model-based fault detection method for heating systems is proposed. Two examples of heating system units
are under investigation. These systems can be represented as multi-linear systems. Subspace identification
methods are used to identify linear time-invariant models for each operating regime, resulting in a parameter
tensor. In case of missing data and models for some operating regimes, an approximation method is proposed,
where the canonical polyadic tensor decomposition method is used. Low rank approximations are found using
an algorithm specialized for incomplete tensors. The tensor of these approximations defines the models in
operating regimes, where no measurements were available. Fault detection is done using parity equations and
application examples using real measurement data of a heat generation unit are given.
1 INTRODUCTION
The analysis of the operation of complex heating sys-
tems usually shows potential for optimization, see
(Rehault et al., 2013). In many cases failed com-
ponents, insufficiently tuned controller parameters as
well as user intervention result in problems of heat
supply and excess consumption. A frequently occur-
ring problem - this shows an investigation of a mul-
titude of malfunctions of heating systems done by
PLENUM - are operation errors of combined heat
and power plants and gas boilers. This includes
faults from manipulated parameters up to complete
loss of the heat production. For this reason a con-
tinuous fault detection is desirable. Currently this
is done on a simple level, meaning threshold value
checks and ordinary rules. This is quite simple, but
reaches its limits of transferability and expandability,
see (Venkatasubramanian et al., 2003). The methods
of fault detection used for heating systems are not best
practice according to today’s technical knowledge and
options, (Katipamula and Brambley, 2005).
A model-based fault detection can provide an en-
hanced detection performance, but is associated with
many obstacles, see (Jagpal, 2006). The behavior of
heating systems and buildings is difficult to predict.
Systems are unique and the creation of exact mod-
els is difficult, time consuming and therefore expen-
sive. Detailed building plans and schemes are rarely
available, the intended function often poorly docu-
mented. Measurement data is intermittent or of poor
quality. Some variables are not directly measurable.
A high number of disturbances occurs. Additionally,
(sub-)system are nonlinear.
The basis of model-based fault detection is a
model of the system, that captures the main system
dynamics in a precision, that is sufficient for the task.
Models of heating systems can be derived by defin-
ing heat power balances, see (Pangalos, 2015). The
heat power balances have a multilinear property, aris-
ing from the multiplication of temperature spread and
flow rate. Since both - temperature spread and flow
rate - are states of the system or linearly depending
on a state of the system (depending on the realiza-
tion of the model) a direct description as a linear state
space model is not possible. Furthermore, discrete
signals like boiler switching (on/off) turn the prob-
lem into a hybrid one. One possibility to model these
hybrid heating systems is to use tensor systems, see
e.g. (Lichtenberg, 2011; Pangalos et al., 2015). This
approach is quite new, such that so far no methods
for system identification exist, only standard nonlin-
ear parameter identification algorithms - which do not
take care of the multilinear structure - could be ap-
Sewe, E., Pangalos, G. and Lichtenberg, G.
Fault Detection for Heating Systems using Tensor Decompositions of Multi-linear Models.
DOI: 10.5220/0006401400270035
In Proceedings of the 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2017), pages 27-35
ISBN: 978-989-758-265-3
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
27

plied. For that reason a different approach is used
here to model the system. The model of the chosen
approach could be represented as a switched system,
see (Liberzon, 2003). By quantizing one of the sig-
nals - temperature spread or flow rate - no multipli-
cation of these signals is needed, because for each
quantized system the signal which was not quantized
is multiplied with a constant. Depending on the size
of the quantization interval, inaccuracies between the
original and the quantized system arise. For each in-
terval of the quantized signal and for each combina-
tion of the discrete signals one linear model is es-
timated using standard techniques, e.g. the N4SID
algorithm, (Van Overschee and De Moor, 2012), re-
sulting in several linear time-invariant systems, i.e.
a multi-linear time-invariant model. Note, that
multi-linear is used to denote multiple linear mod-
els, whereas multilinear - without dash - is used to
denote models where the multiplication of all states
and inputs - and all combinations with all numbers
of multiplicants - are admissible. In multilinear sys-
tems no square terms are allowed, this could be mod-
eled by polynomial models. Note that for polyno-
mial systems black box identification methods exist,
see (Mulders et al., 2009). The heating systems un-
der investigation have the aforementioned multilin-
ear property that could be modeled in the polynomial
framework but the hybrid property (the discrete sig-
nals) are beyond the scope. In addition, the identi-
fication is, opposed to the one step identification of
N4SID an iterative identification which also needs to
be initialized, (Paduart et al., 2010).
This paper shows how this approach can be used
for fault detection in heating systems. In section 2
method and structure for estimating the parameter sets
and fault detection are explained. The complete sys-
tem can be stored in a tensor structure, see section 2.1.
Identification of parameter sets is explained in sec-
tion 2.2. Missing parameter sets for operating points
not included in training data can be estimated by ten-
sor completion, see section 2.3. Fault detection is
done using parity equations, section 2.4. In section 3
two application examples are given. In section 4 con-
clusions are drawn.
2 MODEL-BASED FAULT
DETECTION METHOD FOR
HEATING SYSTEMS
As mentioned before heating systems can be mod-
eled as hybrid multilinear systems. Keeping all
but one signals constant in multilinear terms and
regarding just one combination of the binary sig-
nals will result in a linear behavior. Thus for
each combination of quantized and binary signals,
which will be denoted as operating regime, see
(Murray-Smith and Johansen, 1997), a linear system
can be identified around an operating point. For each
operating regime, measurement data is used to iden-
tify a model. If a large amount of data is available
for one operating regime, the measurement data is
divided into parts, which will be called operational
sections. The set of linear systems for all operating
regimes will be denoted as parameter tensor.
2.1 System Definition
The operating regime I is defined by the combination
of binary signals (e.g. on/off, opened/closed) and the
center of the intervals of quantized signals (e.g. tem-
peratures, flow rates). The signals will be denoted as
partitioning signals, v is the number of partitioning
signals. The operating regime is defined by the index
vector
I = (i
1
, i
2
, . . . , i
v
) (1)
with i
n
= {1, 2, . . . , I
n
}, n = 1, 2, . . . , v. The
number of partitions of the corresponding signal
is I
n
, n = 1, 2, . . . , v. Note that I
n
= 2 for all binary
signals, it is assumed that 0 corresponds to index 1
and 1 corresponds to index 2. For the continuous-
valued operating regime defining signals, the inter-
vals J
1
, . . . , J
j
are used for quantization. The index of
these intervals is also the corresponding index in the
index vector I. The limits of the intervals are stored.
As an example, for a system with one continuous-
valued operating regime defining signal divided into
five sections and one binary signal, the index vector
is I = (i
1
, i
2
) with i
1
∈ {1, . . . , 5} and i
2
∈ {1, 2}.
Around each operating regime a linearization is per-
formed. The result of the linearization is a discrete-
time state space model
x(k +1) = A
I
x(k) +B
I
u(k) (2)
y(k) = C
I
x(k) +D
I
u(k) (3)
where k denotes the time index, I the mode of oper-
ation, x ∈ R
n
the state vector, u ∈ R
m
the input vec-
tor, y ∈ R
p
the output vector, A
I
∈ R
n×n
the system
matrix, B
I
∈ R
n×m
the input matrix, C
I
∈ R
p×n
the
output matrix and D
I
∈ R
p×m
the feed forward ma-
trix. Please note that the A, B, C, and D matrices
must be in a canonical state space representation. The
representation as given in (4) is used to store the en-
tire information of the state space model in a single
matrix, that has dimension R
(n+p)×(n+m)
. Also given
in (4) are the elements of A, B, C, and D in state space
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
28
modal representation. The systems do not have a di-
rect feedthrough, so D is a zero matrix.
A B
C D
=
a
11
0 . . . 0 b
11
. . . . . . b
1m
0 a
22
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0
.
.
.
.
.
.
.
.
.
0 . . . 0 a
nn
b
n1
. . . . . . b
nm
c
11
. . . . . . c
1n
0 . . . . . . 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
c
p1
. . . . . . c
pn
0 . . . . . . 0
.
(4)
To represent the entire multi-linear system, i.e. a lin-
ear system for each combination of the v signals,
defining the operating regime, the parameter tensor M
M ∈ R
(n+p)×(n+m)×I
1
×I
2
×···×I
v
(5)
is created, where the notation of
(Cichocki et al., 2009) is adapted. The entries
of the third to the v
th
+ 2 dimension of M correspond
to the operating regime I. Keeping all but the first
two dimensions constant will give the
A B
C D
matrix of the linear system that is identified for
operating regime I. This matrix is selected despite
the amount of zeros in A and D, to allow a generic
system description. The linearization is performed
for specific values of the input and output signals.
Recall that so far the operating regime was denoted
as a point defining a linear system, i.e. basically the
switching signal if a switched affine system would
have been used. But to find a good approximation
also the inputs and outputs of the linear systems need
to be at their operating point. These values also need
to be stored, but for reasons of size and magnitude
they do not fit into M. The input and output operating
point values
¯
u
I
and
¯
y
I
are stored in the additional
tensor O
O ∈ R
(m+p)×I
1
×I
2
×···×I
v
(6)
with
O(:, I) = [
¯
u
I
¯
y
I
]
T
. (7)
2.2 Identify Parameter Tensor Slices
The first step is to read input and output data as well
as signals that determine the operating regime. De-
pending on the data quality some pre-processing such
as outlier removal and filling data gaps must be done.
By quantization the values of the partitioning signals
are partitioned into intervals. The interval edges are
stored and used for quantization of the application
data. The next step is to detect operating regimes
and sort data by operating regimes. For each oper-
ating regime the operating point for input and out-
put data is stored in O. For black box estimation
of the state-space matrices, MATLAB provides the
N4SID algorithm in the System Identification Tool-
box (Ljung, 2016). A noise component is not esti-
mated, the value is fixed to zero. The MATLAB com-
mand canon with option modal transforms a linear
model into a canonical state-space model in modal
representation. As it does not normalize the B or C
matrix this is done by normalizing the non-zero en-
tries of C for the first output to f
T
. Tensor algorithms
are sensitive to scale of data elements (Fanaee-T and
Gama, 2016), so the parameter f
T
should be chosen
in a way that all resulting entries have the same scale.
The transformation is performed as in (8) to (12).
T
norm
= f
T
1
c
11
0 . . . 0
0
1
c
12
. . . 0
.
.
.
.
.
.
.
.
.
.
.
.
0 0 . . .
1
c
1n
(8)
A
norm
= T
−1
norm
AT
norm
(9)
B
norm
= T
−1
norm
B (10)
C
norm
= CT
norm
(11)
D
norm
= D (12)
For better readability, in this paper it is assumed that
the matrices A, B, C, and D stored in and restored
from the parameter tensor are normalized without
stating the indices
norm
.
2.3 Construct Full Parameter Tensor
For systems where several binary or quantized sig-
nals are determining the operating regime, it is very
likely for some operating regimes that no measure-
ments are taken. Therefore the tensors (5) and (6) can
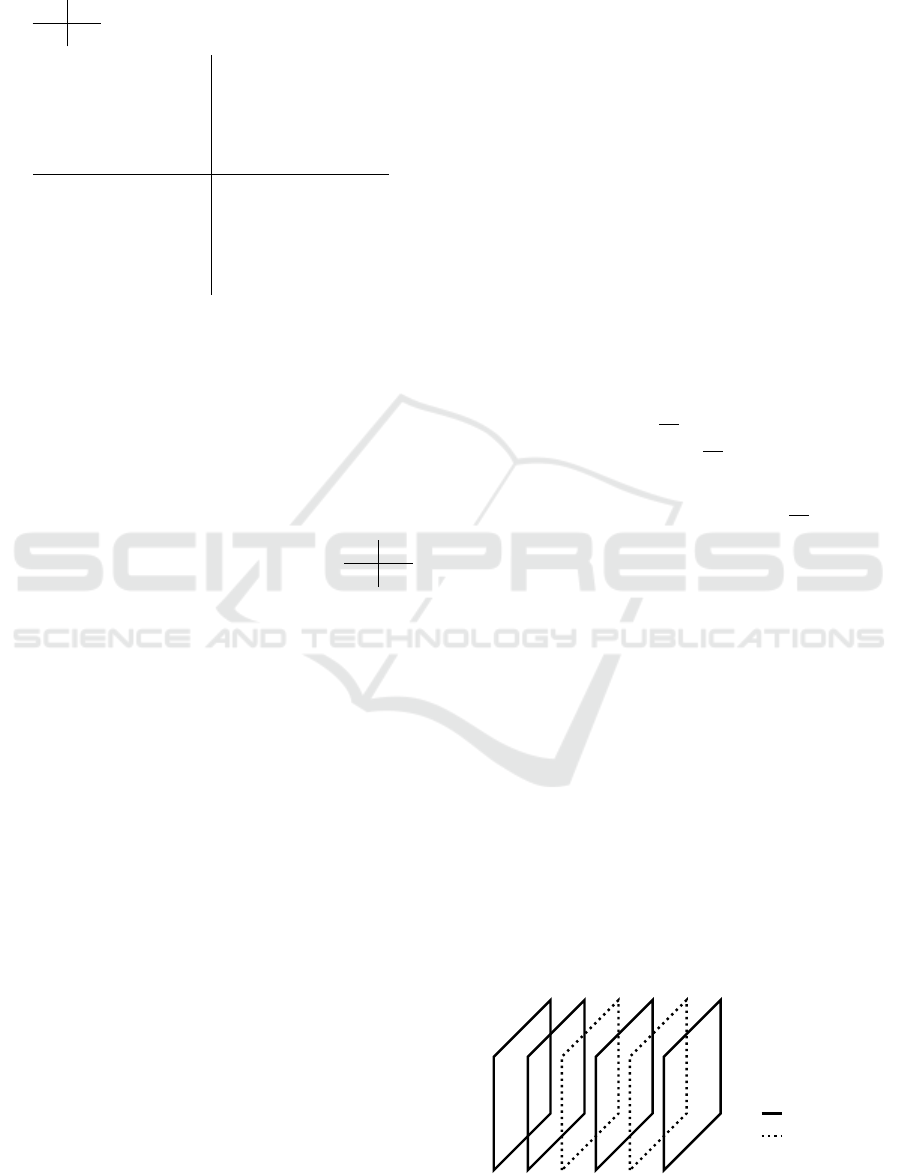
have unknown entries. In figure 1 a schematic view
of an incomplete parameter tensor with one partition-
ing signal is shown. To cope with this problem a ten-
unknown
measured
Figure 1: Incomplete parameter tensor, v = 1.
Fault Detection for Heating Systems using Tensor Decompositions of Multi-linear Models
29
sor decomposition approach is chosen. It is assumed,
that the operating regimes are not independent of each
other but that the system dynamics is influenced by
changing one specific signal which is defining the op-
erating regime. The change of one signal will have
a similar effect for all operating regimes, or at least
can be reconstructed by looking at the change of all
operating regime components. To fill up the miss-
ing entries in the tensors M and O the tensorlab tool-
box, (Vervliet et al., 2016), for MATLAB is used. It
is assumed, that if a low rank approximation is found,
which can represent the existing entries of the ten-
sors, the system dynamics of all operating regimes
are contained in this tensor. By resolving the entire
tensor entries for the previously not defined operat-
ing regimes can be found. To decompose the tensor
the canonical polyadic decomposition algorithm cpd
of the tensorlab toolbox is used. All entries of the ten-
sor, which are unknown, are defined as non existing,
which is done by setting the corresponding entries to
the value NaN in MATLAB. The used algorithm op-
tion CPDI is set to true such that a routine is used,
which is specialized to cope with incomplete tensors.
The general idea to find a decomposed tensor, i.e. the
factor matrices F
h
for a tensor T is to solve the mini-
mization problem
min
F
(1)
,...,F
(H)
1
2
T −
hh
F
(1)
, . . . , F
(H)
ii
2
(13)
where F
(1)
, . . . , F
(H)
denote the factor matrices of the
decomposed tensor, [[. . . ]] is used to represent a tensor
using factor matrices and ||. . . || denotes the Frobe-
nius norm, (Vervliet et al., 2014). The specialized
routine solves the problem
min
F
(1)
,...,F
(H)
1
2
G ~
T −
hh
F
(1)
, . . . , F
(H)
ii
2
(14)
where G ∈ R
I
1
×I
2
×···×I
H
is a binary observation
tensor with the entries set to 1 if the corre-
sponding value in T is known and 0 otherwise
and ~ denotes the Hadamard, i.e. the element-wise
product (Vervliet et al., 2014). Solving this mini-
mization problem does not take into account any un-
known values.
Obviously this approach can just be used if for a
sufficiently large number of operating regimes a lin-
ear state space model can be identified. If the entire
system dynamic is not captured by the measured op-
erating regimes, resolving the tensor will not yield
in a good approximation for the unmeasured oper-
ating regimes. Note also that the selection of the
rank of the approximation is not trivial. Increasing
the rank will introduce freedom in choosing the val-
ues of the unidentified tensor entries and thus not re-
sult in a good approximation, choosing a rank which
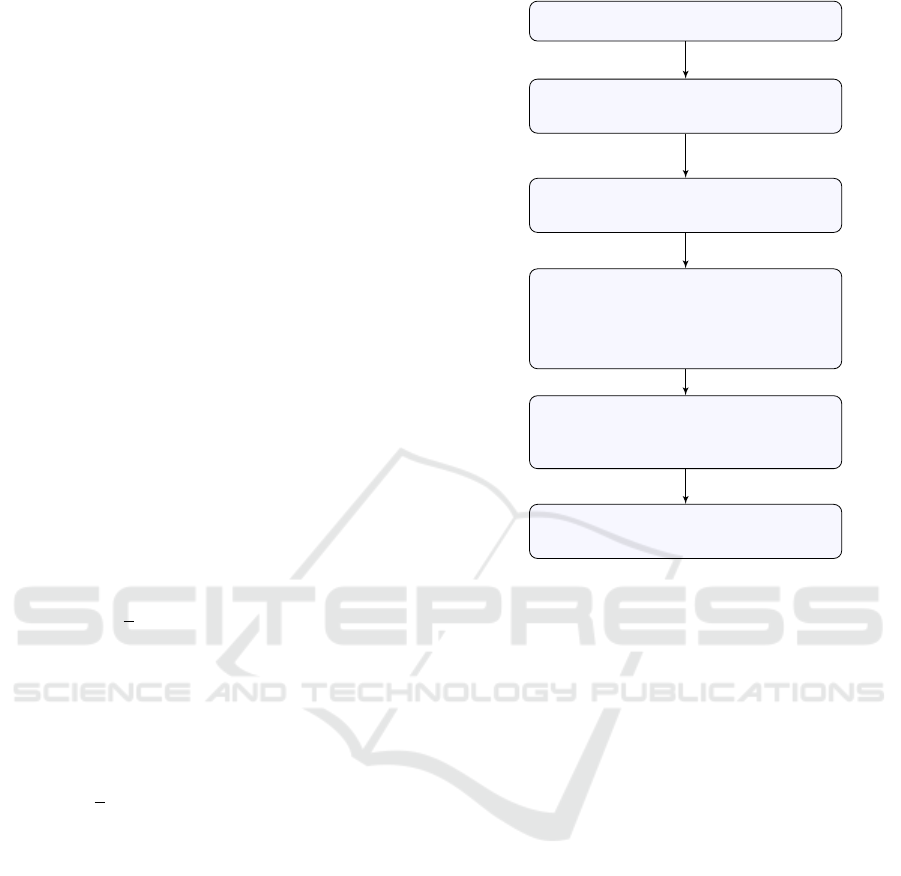
Read and preprocess data
Detect operating regimes and
divide data into operational sections
Merge data of same
operating regimes
Identify normalized canonical
state space models and operat-
ing points for each operating
regime included in the data
Save parameter matrices
and operating points in ten-
sor structures M and O.
Construct full parameter tensor
by cp tensor decomposition
Figure 2: Generating parameter tensor.
is too small results in a tensor which does not cap-
ture the system dynamics. In this paper the rank is
chosen heuristically. Choosing a high rank results in
good approximations for the known parameters in the
parameter tensor. The rank is then reduced until the
unknown parameters are the approximately same for
different initial values in the tensor decomposition.
Summing up sections 2.1 to 2.3, the parameter ten-
sor, describing the system behavior in every operating
regime, can be created as shown in figure 2.
2.4 Fault Detection with Parity
Equations
The proposed method is used for offline fault detec-
tion, using parity equations. See figure 3 for the
fault detection procedure. The parameter tensor in-
troduced in section 2.1 describes the nominal, i.e. the
non-faulty behavior. Parity equations and observer
based designs are a way to detect discrepancies be-
tween process and model. Once the design objectives
have been selected, both lead to identical or equiva-
lent residual generators (Gertler, 1991). The proce-
dure for parity equations is usually simpler than for
observer based designs (Gertler, 1991). One benefit
of parity equation is, that no initial value for the state
vector x is needed. Input and output data are com-
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
30
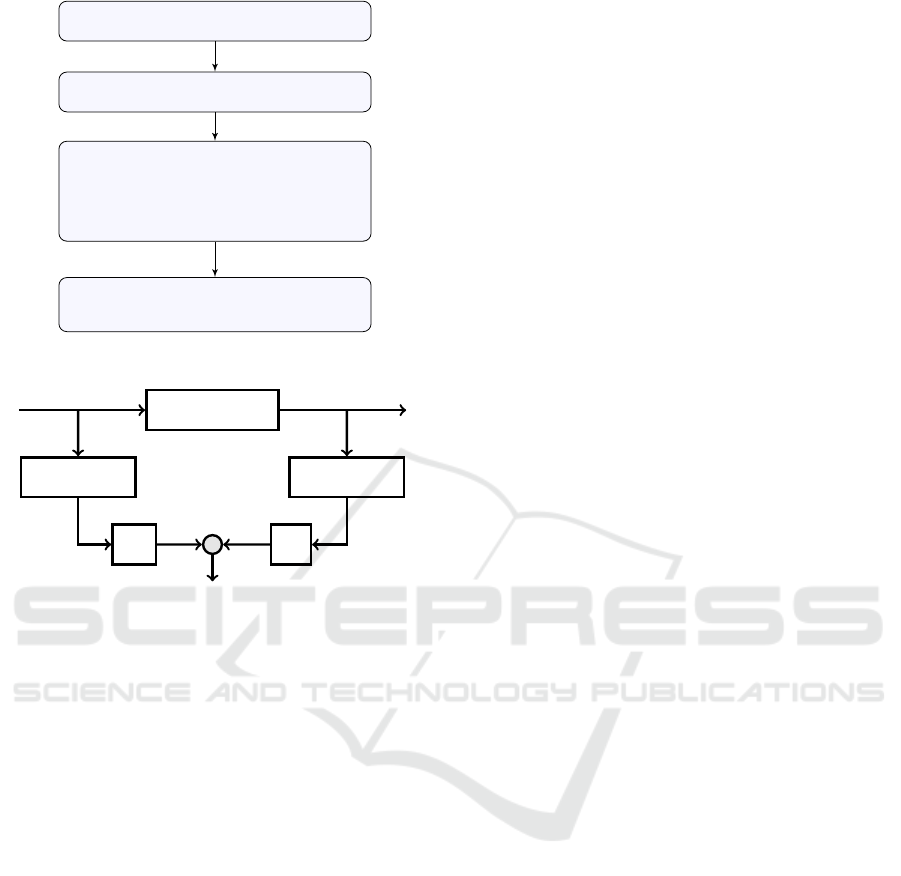
Read and preprocess data
Detect operating regimes
For each operational section
select corresponding matri-
ces A, B, C, and D from M
and operating points from O
Fault detection with parity equation
for each operational section
Figure 3: Fault detection.
heating system
wQ
w
tapped delay tapped delay
u
y
r(k)
−
U
Y
Figure 4: Parity equation.
pared to the model behaviour contained in w and Q,
as seen in figure 4. The tapped delay block delays
the input u respectively the output y by q + 1 time
steps and outputs all the delayed versions, resulting
in U (15) and Y (16).
U(k) =
u(k −q)
u(k −q + 1)
u(k −q + 2)
.
.
.
u(k)
(15)
Y(k) =
y(k −q)
y(k −q + 1)
y(k −q + 2)
.
.
.
y(k)
(16)
The residual r at time k for q + 1 time steps is calcu-
lated by
r(k) = w
I
Y(k) −w
I
Q
I
(q)U(k) (17)
with
Q
I
(q) =
D
I
C
I
B
I
C
I
A
I
B
I
.
.
.
C
I
A
q−1
I
B
I
0
D
I
C
I
B
I
.
.
.
C
I
A
q−2
I
B
I
0
0
D
I
.
.
.
C
I
A
q−3
I
B
I
. . .
. . .
. . .
.
.
.
. . .
0
0
0
.
.
.
D
I
.
(18)
The derivation for (17) is explained in (Isermann,
2006). The residual generator vector w
I
is determined
by solving
w
I
R
I
= 0 (19)
with
R
I
(q) =
C
I
C
I
A
I
C
I
A
2
I
.
.
.
C
I
A
q
I
. (20)
There is more than one solution for (19). The trivial
solution must not be chosen. By selecting w
I
proper-
ties of fault detection are affected. The fault signal e,
where 0 stands for ’no fault’ and 1 for ’fault’ is calcu-
lated by the fault criterion
e(k) =
0 if r(k) ∈ [b
l
, b
u
]
1 else
. (21)
For every operating section the residual r(k) is com-
pared to upper and lower bound, b
u
and b
l
for the de-
cision if there is a fault or not. Due to computation
time and memory use the length of a operating sec-
tion is limited to q + 1 time steps. Operating sections
longer than q + 1 time steps are divided and exam-
ined individually. Upper bound b
u
and lower bound b
l
are determined by calculating the residual r(k) for the
data used to create M and are the same for every op-
erating regime I. This gives the decision boundary
for non-faulty operation. Values of r(k) exceeding the
range limited by b
u
and b
l
are expected to imply faulty
operation.
3 APPLICATION TO HEATING
SYSTEM FAULT DETECTION
The heat generation unit of the heating system of
the State Office for Nature, Environment and Con-
sumerism in D
¨
usseldorf, Germany is investigated.
The heat generation unit consists of three hydrauli-
cally balanced boilers with attached gas burners, two
Fault Detection for Heating Systems using Tensor Decompositions of Multi-linear Models
31
of them are condensing boilers, one is a low tem-
perature boiler. The three boilers together have a
total power of about 1870 kW and supply six con-
sumer circuits. The consumer circuits are not inves-
tigated in this paper and therefore no model of them
is given. The heating system was already under in-
vestigation in (Sewe et al., 2012; Pangalos and Licht-
enberg, 2012), where a model of the entire system is
given and the controller design and implementation
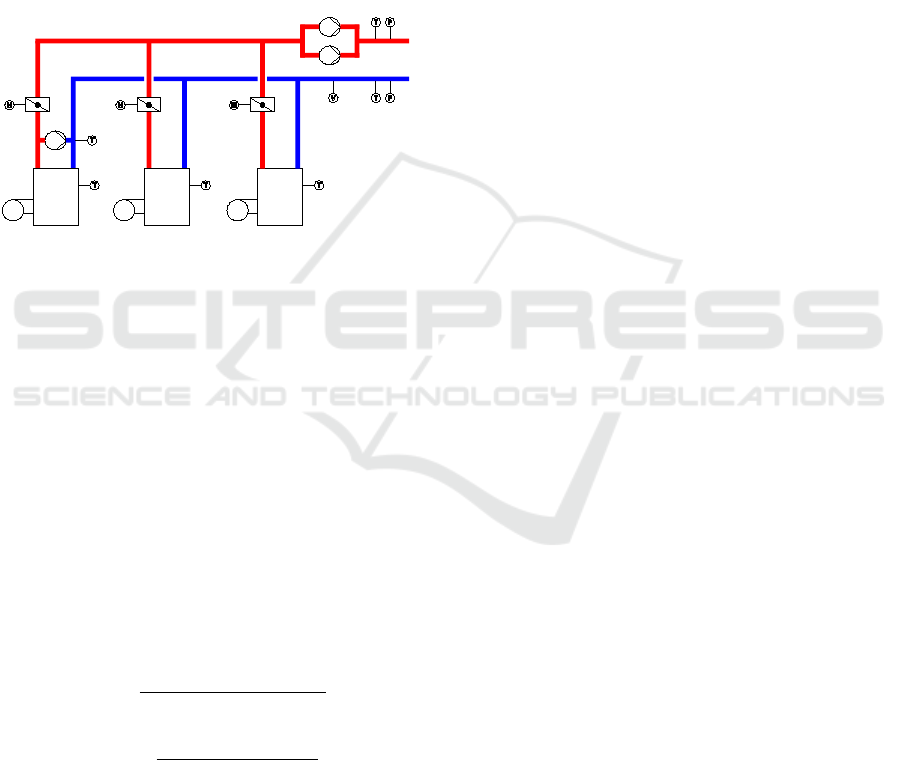
is described. A scheme of the heat generation unit
is given in figure 5. Each boiler is equipped with a
lid such that the flow rate through the boiler can be
stopped when the boiler is switched off.
Boiler 1Boiler 2Boiler 3
Figure 5: Scheme of the heat generation unit.
The inputs of the model of the heat generation unit
are the return temperature T
r
and the power to be pro-
duced by the boilers P
i
, i = 1, 2, 3. The output is the
supply temperature T
s
. The states of the heat genera-
tion model are the supply temperatures of the boilers.
The operating regime of the heat generation unit is
defined by position of the boilers lids (opened/closed)
and the burners switching signals (on/off). The flow
rate is divided in four intervals. For each of these in-
tervals and each of the boiler lid and burner switching
setting, a model of the system is estimated. Result-
ing in a tensor M of dimension R
4×7×4×2×2×2×2×2×2
,
the operating regime index is I = (i
1
, i
2
, i
3
, i
4
, i
5
, i
6
, i
7
)
with i
1
∈ {1, . . . , 4} and i
n
∈ {1, 2} for n = 2, . . . , 7.
The heat generation unit can be modelled, with some
simplifications, as described in (Kruppa, 2014) by
T
s
=
T
s1
˙
V
s1
+ T
s2
˙
V
s2
+ T
s3
˙
V
s3
˙
V
, (22)
˙
T
si
=
P
i
+ c
w
ρ
˙
V
si
(T
r
− T
si
)
c
w
ρV
si
(23)
and
˙
V =
˙
V
s1
+
˙
V
s2
+
˙
V
s3
, (24)
where T
s
is the supply temperature of the heat gener-
ation unit, T
r
is the return temperature,
˙
V is the flow
rate out of the heat generation unit and back into it, T
si
are the supply temperatures, V
i
the volumes, P
i
the
input powers of the boilers 1, 2 and 3 respectively,
for i = 1, 2, 3,
˙
V
i
are the flow rates through the boil-
ers, c
w
is the specific heat capacity of water and ρ the
water density.
3.1 Fault Detection on a Multi-boiler
System
As stated in section 2.3, tensor completion of the pa-
rameter tensor only yields in correct approximations
if a sufficiently large number of operating regimes
can be identified. For that reason this first example
demonstrates the proposed method using a MATLAB
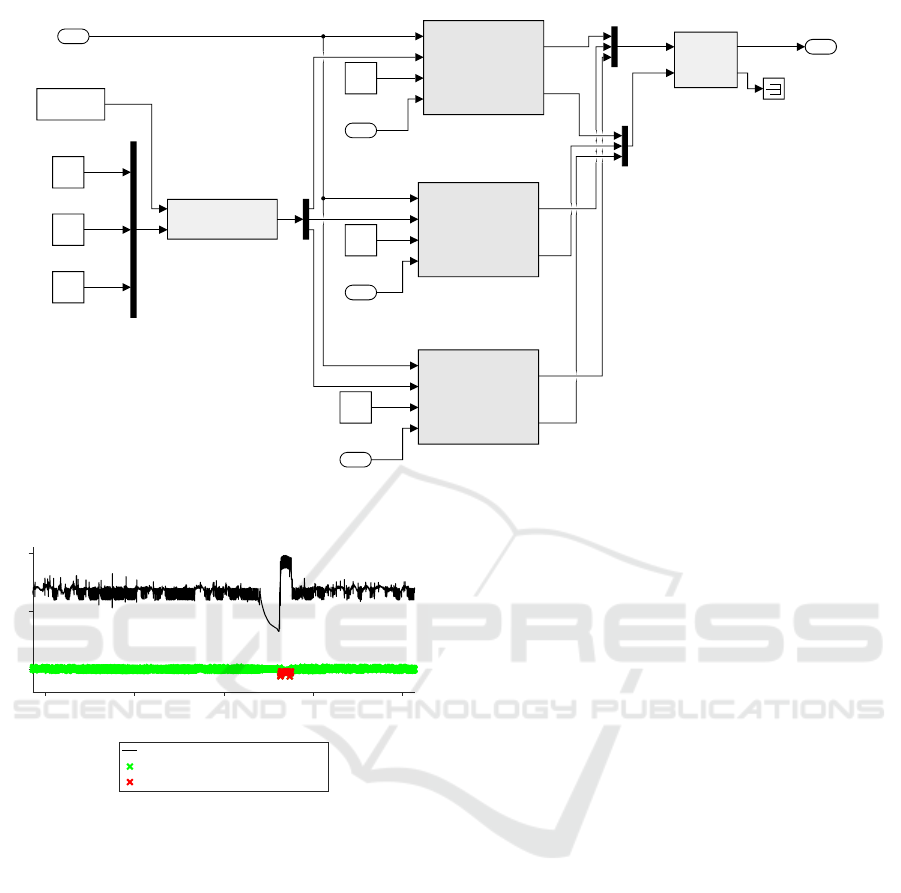
SIMULINK model as shown in figure 6. The model
is created with slightly simplified components of the
HeatLib (Kruppa, 2014). Its parameters are adapted
to fit the heat generation unit described above.
Instead of using the N4SID algorithm, a discrete-
time linear state-space model around the operating
point is extracted, using MATLAB SIMULINK . A
complete parameter tensor is created and can be ma-
nipulated by deleting several operating regimes. Us-
ing the introduced tensor decomposition and recon-
struction method, the parameter tensor is completed
again. In (25) and (26) the A matrix for one operating
regime I is shown, where (25) is the original and (26)
the restored matrix.
A
I
=
0.8532 0 0
0 0.8157 0
0 0 0.7731
(25)
A
I
=
0.8532 −0.001 −0.000
−0.001 0.8156 −0.000
−0.001 −0.001 0.7730
(26)
The incomplete parameter tensor has stored suffi-
cient information of the entire system dynamic so
that resolving the tensor yields to a good approx-
imation. The tensors M and O are used for fault
detection on real input and output data. Figure 7
shows the measured supply temperature and the re-
sulting residual r(k) for each operational section. In
case of of fault, i.e. e(k) = 1, r(k) is marked red,
for non-faulty sections it is marked green. One sum-
mer month is tested. After a complete system break-
down on June 18
th
the supply temperature drops to
temperatures below 35
◦
C. No fault is detected be-
cause input data is consistent to output data, boilers
are not turned on in this period. As a consequence,
on June 20
th
, boiler 2 has been turned on in manual
mode. It is working on full power and ignoring con-
troller signals, thus heating up the system until it is
stopped by an emergency switch, now working as a
two point controller. This does not match to expected
system behavior. The fault is detected correctly. On
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
32
[T]
[dV]
T_Vl
dV_Vl
flow rate collector
Vdot
Klappe
Vdot Kessel
flow rate distribution
1
supply temperature
T_Rl
dV_ein
Kessel an/aus
Modulation
T_Kessel
dV_Kessel
boiler 3
T_Rl
dV_ein
Kessel an/aus
Modulation
T_Kessel
dV_Kessel
boiler 2
T_Rl
dV_ein
Kessel an/aus
Modulation
T_Kessel
dV_Kessel
boiler 1
3
power 2
1
return temperature
4
power 3
2
power 1
Kl1
lid 1
Kl2
lid 2
Kl3
lid 3
B3
burner 3
B2
burner 2
B1
burner 1
Vdot
flow rate
Figure 6: Heat generation unit modelled in SIMULINK .
06/02 06/09 06/16 06/23 06/30
day
0
50
100
measured supply temperature [°C]
r(k)
r(k) for e(k)==1
Figure 7: Fault detection - heat generation unit.
June 21
st
the boiler has been set back to normal oper-
ating mode.
3.2 Fault Detection on a Single Boiler
The method explained in chapter 2 is performed
on boiler 2, using black box identification (N4SID,
MATLAB System Identification Toolbox) to estimate
the state space matrices. It is a first order system.
The inputs of the model of boiler 2 are the return
temperature T
r
and the power to be produced by the
boiler P
2
. The output is the supply temperature T
s2
.
The state is also the supply temperature of the boiler.
The operating regime of the boiler is defined by the
burner switching signal (on/off) and the flow rate. As
boiler 2 is the main supplier of the heating system,
no training data with the lid closed is available and
therefore it cannot be used as an operating regime.
The flow rate is divided in seven intervals. For each
of these intervals and each of the burner’s switching
setting a model of the system is estimated. Result-
ing in a tensor M of dimension R
2×3×7×2
, the oper-
ating regime index is I
b
= (i
1
, i
2
) with i
1
∈ {1, . . . , 7}
and i
2
∈ {1, 2}. The parameter tensor is created with
measurement data of six month. Thirteen of fourteen
operating regimes appear in this data set. For im-
proved illustration of the proposed method, parame-
ters of two known operating regimes are deleted. The
entries of the parameter tensor corresponding to the A
matrices - which are scalars in this case, since a first
order system is under investigation - in the different
operating regimes are shown in (27), where ∗ marks
the missing modes. The seven entries in the first di-
mension correspond to the seven intervals of the flow
rate and the two entries in the second dimension cor-
respond to the burner switching signal.
M(1, 1, :, :) =
1.00 0.89
0.81 0.76
0.82 ∗
0.68 0.75
∗ 0.69
0.57 0.64
∗ 0.62
(27)
As the system can be described by (23), for all op-
erating regimes including the missing ones, it can be
assumed, that C = 1 and D = [0 0 ]. To fill up the
missing entries a tensor decomposition of rank 2 is
approximated. Unfolding this tensor to a full tensor
Fault Detection for Heating Systems using Tensor Decompositions of Multi-linear Models
33

gives the result
M(1, 1, :, :) =
1.00 0.88
0.80 0.77
0.82 0.79
0.70 0.73
0.63 0.69
0.57 0.64
0.50 0.62
. (28)
The parameter tensor partially shown in (28) is vali-
dated on the six month of training data, see figure 8.
The six errors detected in the training data are in op-
erational sections where the lid of boiler 3 has been
opened or closed. So it is assumed, that the flow
rate
˙
V
s2
, calculated by the flow rate
˙
V , hydraulic pa-
rameters and the position of the boilers lids, in these
sections is faulty due to inaccuracy in data logging.
The parameter tensor is tested on data of the same pe-
riod as used for the simulation in figure 7. As can
be seen in figure 9, the fault is detected correctly.
Another fault can be observed in a winter month as
seen in figure 10. Till December 14
th
, boiler 2 is
not processing the controller power signal, thus not
producing the correct amount of heat, but the burner
switching signal (on/off) is configured correctly. So
the boiler is turned on at the correct periods but does
not vary the power output. As a result, the supply tem-
perature T
s2
exceeds the set point temperature and the
01/01 02/01 03/01 04/01 05/01 06/01
day
0
50
100
measured supply temperature [°C]
r(k)
r(k) for e(k)==1
Figure 8: Fault detection boiler 2, model validation.
06/02 06/09 06/16 06/23 06/30
day
0
50
100
measured supply temperature [°C]
r(k)
r(k) for e(k)==1
Figure 9: Fault detection boiler 2, manual operation.
12/04 12/11 12/18 12/25
day
0
50
100
measured supply temperature [°C]
r(k)
r(k) for e(k)==1
Figure 10: Fault detection boiler 2, failure in power control.
controller can not keep the multi-boiler system stable.
On December 14
th
, a service engineer adjusted the
parameters of boiler 2 and for the remaining time of
the data set the system worked as expected. For the
faulty part of the data set the residual r(k) has values
exceeding the range limited by b
u
and b
l
, so the fault
is detected correctly. The two errors detected after
December 15
th
are in operational sections where the
lid of boiler 3 has been opened or closed, so as well
as in figure 8, faulty input data for calculation of
˙
V
s2
is assumed.
4 CONCLUSIONS
A method to detect faults in heating systems has been
proposed. The fault detection is model-based such
that models of heating systems were investigated. A
multi-linear time-invariant system is constructed by
identifying multiple linear time-invariant systems for
different operating regimes. To define the operat-
ing regime, signals, which are multiplied with inputs
or states, are quantized. This multiplication arises
from the heat power balances, which are the basis
of the models. There the multiplication of tempera-
ture (which is a state) and flow rate (which is an in-
put) makes the system nonlinear. By quantizing the
flow rate, multiple linear systems can be defined. Fur-
thermore, different binary signals extend the operat-
ing regime. For each interval of the flow rate and
each binary signal, a linear system is identified. All
these systems build the parameter tensor. If for some
operating regimes no measurement data is available,
an approximation method is proposed. By estimating
low rank approximations of the parameter tensor with
specialized algorithms for incomplete tensors, good
approximations of the systems, where no measure-
ment data was available could be found. The general
functionality is shown in two application examples.
The fault in the measurement data was identified in
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
34

both examples. Work will be continued on improved
estimation of system matrices on operating regimes
with missing measurement data.
ACKNOWLEDGEMENTS
This work was partly supported by the project
OBSERVE of the Federal Ministry for Economic Af-
fairs and Energy, Germany (Grant-No.: 03ET1225C)
and partly supported by the Free and Hanseatic City
of Hamburg (Hamburg City Parliament publication
20/11568).
REFERENCES
Cichocki, A., Zdunek, R., Phan, A., and Amari, S. (2009).
Nonnegative matrix and tensor factorizations. Wiley,
Chichester.
Fanaee-T, H. and Gama, J. (2016). Tensor-based anomaly
detection: An interdisciplinary survey. Knowledge-
Based Systems, 98:130–147.
Gertler, J. (1991). Analytical redundancy methods in fault
detection and isolation. In Preprints of IFAC/IMACS
Symposium on Fault Detection, Supervision and
Safety for Technical Processes SAFEPROCESS91,
pages 9–21.
Isermann, R. (2006). Fault-diagnosis systems: an introduc-
tion from fault detection to fault tolerance. Springer
Science & Business Media.
Jagpal, R. (2006). EBC Annex 34 - computer aided eval-
uation of HVAC system performance - technical syn-
thesis report: Computer aided evaluation of HVAC
system performance.
Katipamula, S. and Brambley, M. (2005). Methods for
fault detection, diagnostics, and prognostics for build-
ing systems - a review, part I. HVAC&R Research,
11(1):3–25.
Kruppa, K. (2014). Dokumentation Matlab Heatlib - Zur
Verwendung mit Matlab. Dokumentation, Institut f
¨
ur
Regelungstechnik, TU Hamburg-Harburg.
Liberzon, D. (2003). Switching in systems and control,
ser. Systems & Control: Foundations & Applications.
Boston: Birkh
¨
auser.
Lichtenberg, G. (2011). Hybrid Tensor Systems. Habilita-
tion, Hamburg University of Technology.
Ljung, L. (2016). System identification toolbox: user’s
guide.
Mulders, A. V., Schoukens, J., Volckaert, M., and Diehl,
M. (2009). Two nonlinear optimization methods for
black box identification compared. IFAC Proceedings
Volumes, 42(10):1086 – 1091.
Murray-Smith, R. and Johansen, T. A. (1997). Multiple
Model Approaches to Modelling and Control. Taylor
and Francis, London.
Paduart, J., Lauwers, L., Swevers, J., Smolders, K.,
Schoukens, J., and Pintelon, R. (2010). Identification
of nonlinear systems using polynomial nonlinear state
space models. Automatica, 46(4):647 – 656.
Pangalos, G. (2015). Model-based Controller Design Meth-
ods for Heating Systems. dissertation, Hamburg Uni-
versity of Technology.
Pangalos, G., Eichler, A., and Lichtenberg, G. (2015). Hy-
brid Multilinear Modeling and Applications, pages
71–85. Springer International Publishing, Cham.
Pangalos, G. and Lichtenberg, G. (2012). Approach
to boolean controller design by algebraic relaxation
for heating systems. IFAC Proceedings Volumes,
45(9):210–215.
Rehault, N., Lichtenberg, G., Schmidt, F., and Harmsen,
A. (2013). Modellbasierte Qualit
¨
atssicherung des
energetischen Geb
¨
audebetriebs (ModQS). Abschluss-
bericht. Technical report.
Sewe, E., Harmsen, A., Pangalos, G., and Lichtenberg,
G. (2012). Umsetzung eines neuen Konzepts zur
Mehrkesselregelung mit Durchflusssensoren. HLH
L
¨
uftung/Klima - Heizung/Sanit
¨
ar - Geb
¨
audetechnik,
1:37 –42.
Van Overschee, P. and De Moor, B. (2012). Subspace iden-
tification for linear systems: Theory - Implementation
- Applications. Springer Science & Business Media.
Venkatasubramanian, V., Rengaswamy, R., Kavuri, S. N.,
and Yin, K. (2003). A review of process fault
detection and diagnosis: Part iii: Process history
based methods. Computers & chemical engineering,
27(3):327–346.
Vervliet, N., Debals, O., Sorber, L., and Lathauwer, L. D.
(2014). Breaking the curse of dimensionality using
decompositions of incomplete tensors: Tensor-based
scientific computing in big data analysis. IEEE Signal
Processing Magazine, 31(5):71–79.
Vervliet, N., Debals, O., Sorber, L., Van Barel, M., and
De Lathauwer, L. (2016). Tensorlab user guide.
Fault Detection for Heating Systems using Tensor Decompositions of Multi-linear Models
35
