
An ADAS Design based on IoT V2X Communications to Improve
Safety
Case Study and IoT Architecture Reference Model
Yakusheva Nadezda
1
, Gian Luca Foresti
2
and Christian Micheloni
2
1
Department of Information Engineering,University of Udine, Udine, Italy
2
Department of Mathematics, Informatics and Physics, University of Udine, Udine, Italy
Keywords: Vehicle Safety, Advanced Driver Assistance Systems; Vehicular Ad Hoc Networks, Internet of Things,
Connected Vehicles, Intelligent Transportation Systems, Wireless Sensor Networks, Vehicle to X
Communications.
Abstract: Several technologies are used today to improve safety in transportation systems. The development of a
system for drivability based on both V2V and V2I communication is considered an important task for the
future. V2X communication will be a next step for the transportation safety in the nearest time. A lot of
different structures, architectures and communication technologies for V2I based systems are under
development. Recently a global paradigm shift known as the Internet-of-Things (IoT) appeared and its
integration with V2I communication could increase the safety of future transportation systems. This paper
brushes up on the state-of-the-art of systems based on V2X communications and proposes an approach for
system architecture design of a safe intelligent driver assistant system using IoT communication. In
particular, the paper presents the design process of the system architecture using IDEF modeling
methodology and data flows investigations. The proposed approach shows the system design based on IoT
architecture reference model.
1 INTRODUCTION
In the recent years a lot of efforts have been made to
improve traffic safety. But transportation-related
fatalities and injuries due to road accidents are
constantly growing. Therefore improvement of
driver assistance is an urgent task.
A lot of efforts have been made to face safety
problems in the transportation systems. Avenues of
research and development of automotive industry
are directed towards a driver assistance system,
active control and safety mechanism. Today we can
see a lot of on-board control systems (in-vehicle
systems) thanks to investigations of automotive
industry (Audi, BMW, Daimler, General Motors,
Ford, Honda, Mercedes-Benz, Nissan, Opel, PSA,
Toyota, Volkswagen, Volvo).
In-vehicle safety technologies presented by
different kinds of passive and active protection
mechanisms (van Ratingen, 2015): warning systems;
car robust control systems; emergency braking
systems; automatic parking systems, etc. According
to Khan (2016) the main sensors of ADAS
architecture are Camera, Lidar, Radar, ultrasonic
sensor, IR sensor, GPS. For example, Lussereau et
al. (2015) describe the ADAS project of INRIA
Rhone-Alpes and Toyota Europe, which uses high-
resolution camera, stereo camera, two Lidars, GPS
with IMU.
Moreover, the information from out-vehicle
sensors can be used in order to improve the road
safety along with the information from in-vehicle
sensors. Therefore, governments and the business
support investigation of Intelligent Transportation
Systems (ITS) and vehicle ad-hoc networks
(VANET) (European Parliament Directive
2010/40/EU 2010, Stübing et al. 2010, Wieker, H et
al. 2009). Mostafa (2011) notes that VANET
connects cars between each other and with the
current infrastructure to decide safety issues. Wieker
et al. (2009) defines the main purpose of ITSs like
the traffic management: prevention of traffic
congestions and warning drivers. ITSs can provide
regulation of the traffic flow velocity, the traffic
lights switching, driver notification, electronic
payments, real-time road mapping, route
optimization and adaptation to specific weather
conditions.
352
Nadezda, Y., Foresti, G. and Micheloni, C.
An ADAS Design based on IoT V2X Communications to Improve Safety - Case Study and IoT Architecture Reference Model.
DOI: 10.5220/0006375303520358
In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2017), pages 352-358
ISBN: 978-989-758-242-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

A number of partnerships and associations have
been created recently to develop ITS: Intelligent
Transportation Society in USA, ERTICO-ITS
Partnership (2016) in Europe, etc. ‘The Network of
National ITS Associations’ website (2016) refers to
27 member-organizations. In the field of VANET
the associations are Car2Car Communication
Consortium (C2C-CC) in Europe (Papadimitratos et
al. 2009), Vehicle Safety Communication
Consortium (VSCC) in United States and Advanced
Safety Vehicle (ASV) in Japan. Different ITS and
VANET projects were developed: CVIS, SIM-TD
(Germany), COMeSafety, PRE-DRIVE C2X, CVIS,
SAFESPOT, COOPERS, SEVECOM, Network on
Wheels (NoW), ACTIV (Germany), CVHS (UK),
IVSS (Sweden), Adaptive (EU), Autonet2030 (EU)
(Papadimitratos et al. 2009,
Stübing et al. 2010).
Vehicle communication is an important part of
ITSs and VANETs and the basis of autonomous
cars. In 2015 Massachusetts Institute of Technology
has choose V2V communication as one of its Ten
Breakthrough Technologies of 2015. Moreover,
Zhang (2015) and Mostafa (2011) have shown that
the use of V2X communication instead of Vehicle-
to-Vehicle (V2V) provides a number of
improvements. The V2X can be uses to obtain
various kinds of infrastructure information about
dangers and content information, not directly related
to cars.
But there is a number of issues that need
improvement to get further enhanced safe driving
systems. First of all, ADAS systems are embedded
only in some models of car. In-vehicle, VANET and
ITS systems are mostly separated, using different
technologies and standards, their own designed
microchips. Some of them have no connection with
infrastructure (V2I), some of them even have no
V2V connection. It is therefore important to
investigate mechanisms in order to combine
different vehicle systems. It could be a huge step
forward and will expedite their implementation. As
well as development of the systems using the same
Standards and reference model are important issues
for the future vehicle infrastructure.
In this paper is proposed an ADAS design
approach using methodologies IDEF and data flow
analysis, in order to get objectives: to improve traffic
safety and to face existing problems. We propose
cooperative DAS architecture, which taking into
account most of common equipment currently
available in cars: car DVR, cameras, navigators and
smartphones. Also we updated system with new
vehicle communications technologies based on
Internet of Things (IoT) and ensure its comparability
with other systems by using actual Standards. We
proposed an approach in order to integrate IoT into
V2X communication by using IoT reference model
and modern Standards. The approach is
demonstrated on the case-study example.
2 MODERN COMMUNICATION
TECHNOLOGIES AND ISSUES
Vehicle communications have their roots in
machine-to-machine (M2M) communications
technologies. Nowadays M2M concept came out of
the scope of communication between devices of the
same type, and developed into a broader and more
modern concept Internet of Things (IoT). The IoT
allows connecting different types of physical objects
or "things" to the network via the Internet protocols
(IP) to enable it exchanging data with other
connected devices, infrastructures, and operators
(Vasseur 2014), (Al-Fuqaha et al. 2015). Each
“thing” is uniquely identifiable through its
embedded computing system and it is able to
interoperate within the existing Internet
infrastructure.
The most important advantage of IoT is using IP
to connect devices via Internet. It is very important
for the possibility to integrate different IoT systems
(government, transport, medicine, education, energy
etc) with regards to more global Internet of
Everything concept (IoE). Let’s note the
revolutionary meaning of the IoT and IoE concepts
for our life. In the future IoE should combine all our
devices, gadgets, vehicles, biochips. IoT/IoE
technologies are the essential building blocks of the
future information society (Vasseur 2014).
There are a lot of issues in the transformation
vehicle systems according to IoT concept. Most of
the existing solutions are isolated from each other
and seem to be “INTRAnet of Things” but not
“INTERnet of Things” (Bassi 2013). That’s why
formulating new approach for design of the IoT
system architecture and building IoT systems
according to modern Standards are important issues.
3 CASE STUDY
3.1 An Approach to the System
Architecture Design
The proposed system is focused on the road safety
mission. In the architecture modeling process we
have used Integration Definition (IDEF) modeling
methodology and Data Flow analysis. IDEF is a set
An ADAS Design based on IoT V2X Communications to Improve Safety - Case Study and IoT Architecture Reference Model
353
of powerful modeling methods and modeling
languages most used to design and analyze highly
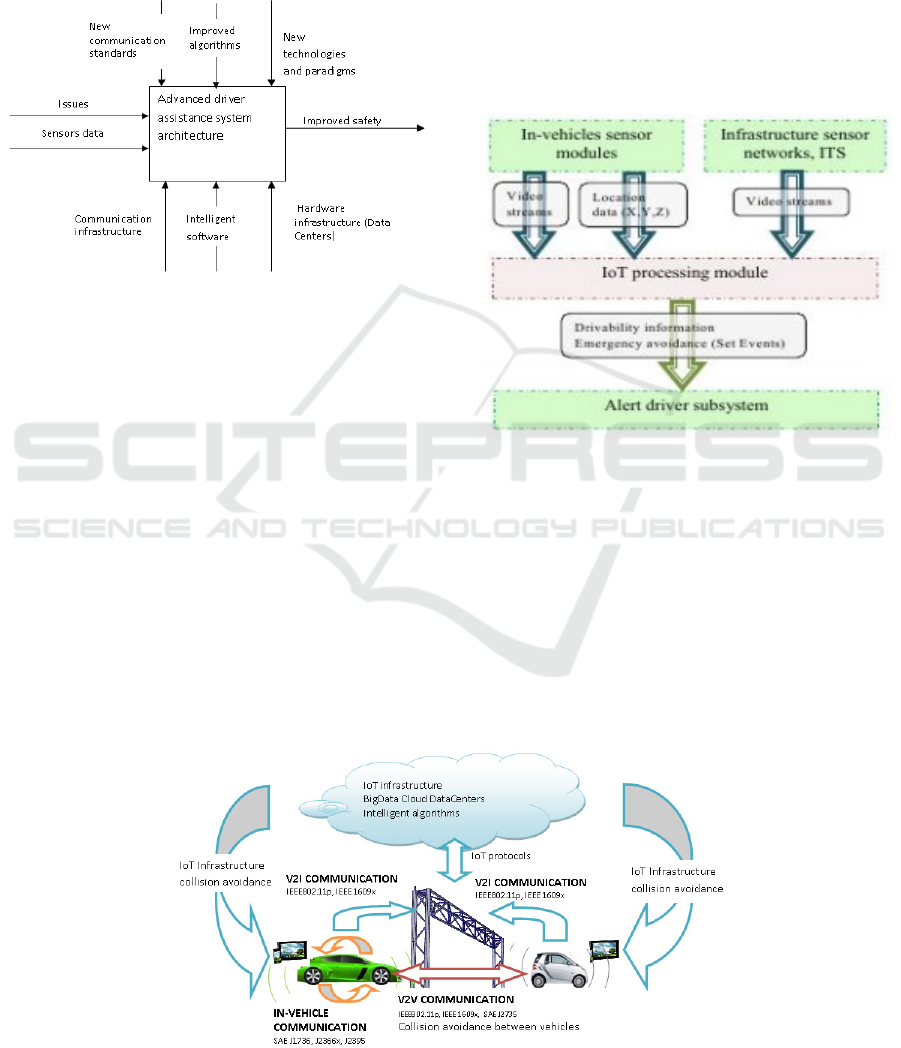
complex systems. In Fig. 1 system being developed
presents in function modeling language (IDEF0
Diagram). The input of the function is issues and
sensors data. The output of the function is our main
objective: in result we would have improved safety.
Figure 1: Function model (IDEF0 Diagram).
The control of the IDEF0 function is the new
technologies and new standards. We supposed the
new technologies are IoT/IoE, Cloud computing.
Also according with the IDEF0 control we would
design architecture with modern V2V and V2I
communication standards, as well as update it with
IoT standards. The mechanisms of the IDEF0
function are communication infrastructure, powerful
Data Centers, intelligent algorithms. We suppose to
use Cloud, Fog computing to provide Big data
analysis with object detection complex algorithms.
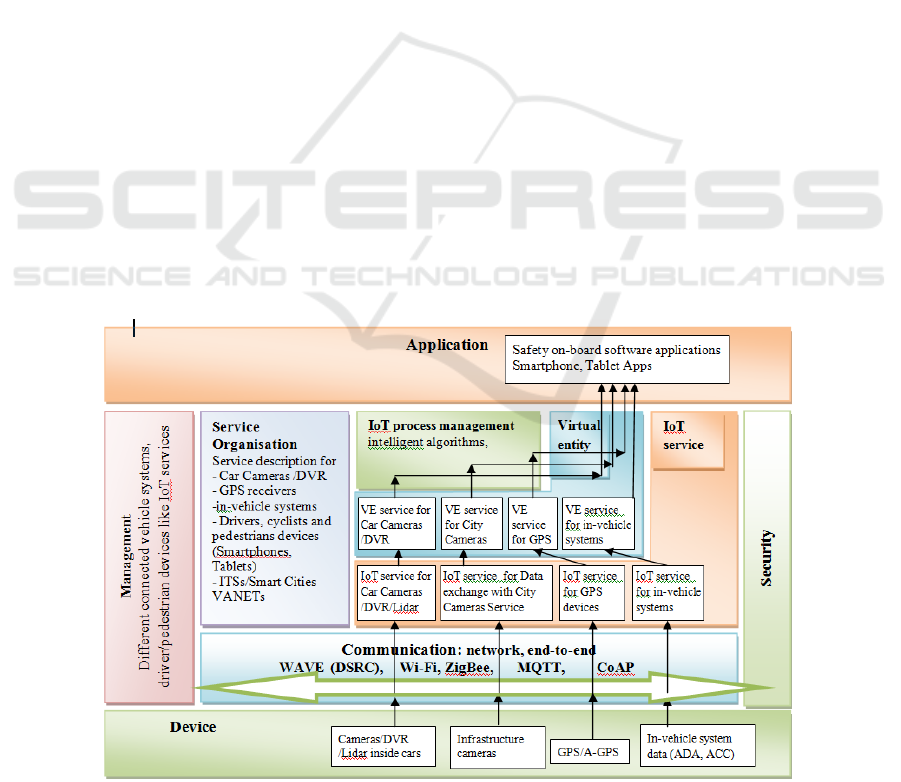
The designed system architecture is shown in
Fig. 2. In order to realize V2X communication we
suppose to use on-board cameras inside the car as
well as infrastructure cameras network. Moreover,
we use improved IoT V2X communication which
allows collecting information from different kind of
sensors, devices and systems - “things” in IoT:
vehicles, DAS, in-vehicle and infrastructures sensors
and driver`s gadgets (Laptop, Smartphone). All
these “things” connected to the server (Data Center)
with intelligent logic via IoT. The system has been
designed according to the objective of getting a
maximum standardization. On the fig. 2 the cars
have reachable ITS. Usually ITS consist of Vehicle
Station (VS), Road Station (RS), Road Side Unit
(RSU) and Server (Stübing et al. 2010). The
information from ITS and over infrastructure
information became available for the driver in order
to connection of the ITS station to the IoT.
Figure 3: Data Flow Diagram for cooperated DAS.
The system is connected to the powerful Data
Center via Internet. In this case can be used more
sophisticated intelligent algorithms. That allows
building a enhanced and low-cost client part of the
system for drivability.
Data flow diagram is shown on the Fig. 3. You can
see that proposed system evaluates different aspects
of the traffic situation due to video and navigation
data both from in-vehicle and infrastructure sensors.
Figure 2: Designed V2X system architecture with proposed approach.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
354
3.2 IoT ARM Development for the
Designed System
We designed IoT architecture for cooperative DAS
according to the standard of European
Telecommunications Standards Institute (2010)
ETSI 302 665 ITS and IoT Reference Architecture
Model (ARM) (Bassi 2013) to ensure compatibility
with other IoV decision in the future (Fig. 4). The
standard ETSI 302 665 ITS presents network layers
for vehicle networks, where IoT architecture have to
include 4 layers: “Access level” representing ITSC`s
OSI layers 1 and 2, “Networking and Transport
level” representing ITSC`s OSI layers 3 and 4,
“Facilities” representing ITSC`s layers 5-7,
“Application level” representing layers 7.
The IoT Management is a semantic level of IoT
process management; it describes the conceptual
integration of management in IoT ARM. This level
provides integration of all subsystems, different IoT
component and push IoT systems from isolated
«inTRAnet of things» to the Internet of things.
The IoT Service Organization layer describes
structure of IoT services and provide possibility to
control these services. Because of these two layers
(IoT Management and Service Organization) we can
build balanced system architecture.
The IoT Service layer provides data acquisition
and control of the “things” (sensors and devices).
It’s a different host server IoT apps (IoT services)
for interaction with physical sources.
The Virtual Entity (VE) presents real physical
objects and subjects like abstract information
business model (present “things” of the real world
by classes, database data representation model etc.).
Lets describe IoT ARM layers of the designed
cooperated DAS.
3.2.1 Device Level: Sensors
Sensors module consists of sensors inside the car
(in-vehicle sensor) and road infrastructure sensors
(Fig. 5). We propose to use common devices we
have in the car: navigators, car DVR, cameras, GPS,
Smartphone, Tablet, existing infrastructure cameras,
infrastructure road sensors and other sources of
information. The most important sensors are
cameras.
Navigation sensors are GPS receiver, low-cost
models strapdown INS or mobile enable device with
A-GPS technology.
3.2.2 Communication Layer
We consider car has a vehicle station (VS) and M2M
microchip supported Dedicated Shot-Range
Communication (DSRC) technology to realize V2V
communication.
In Fig. 2 and 4 are shown that cars are connected
each other by V2V with wireless protocols for
vehicle WAVE (Wireless Access in Vehicular
Environments). PSY and MAC levels of the WAVE
was described in the Standard IEEE 802.11p
Figure 4: Proposed system ARM network levels according to ETSI standard.
An ADAS Design based on IoT V2X Communications to Improve Safety - Case Study and IoT Architecture Reference Model
355
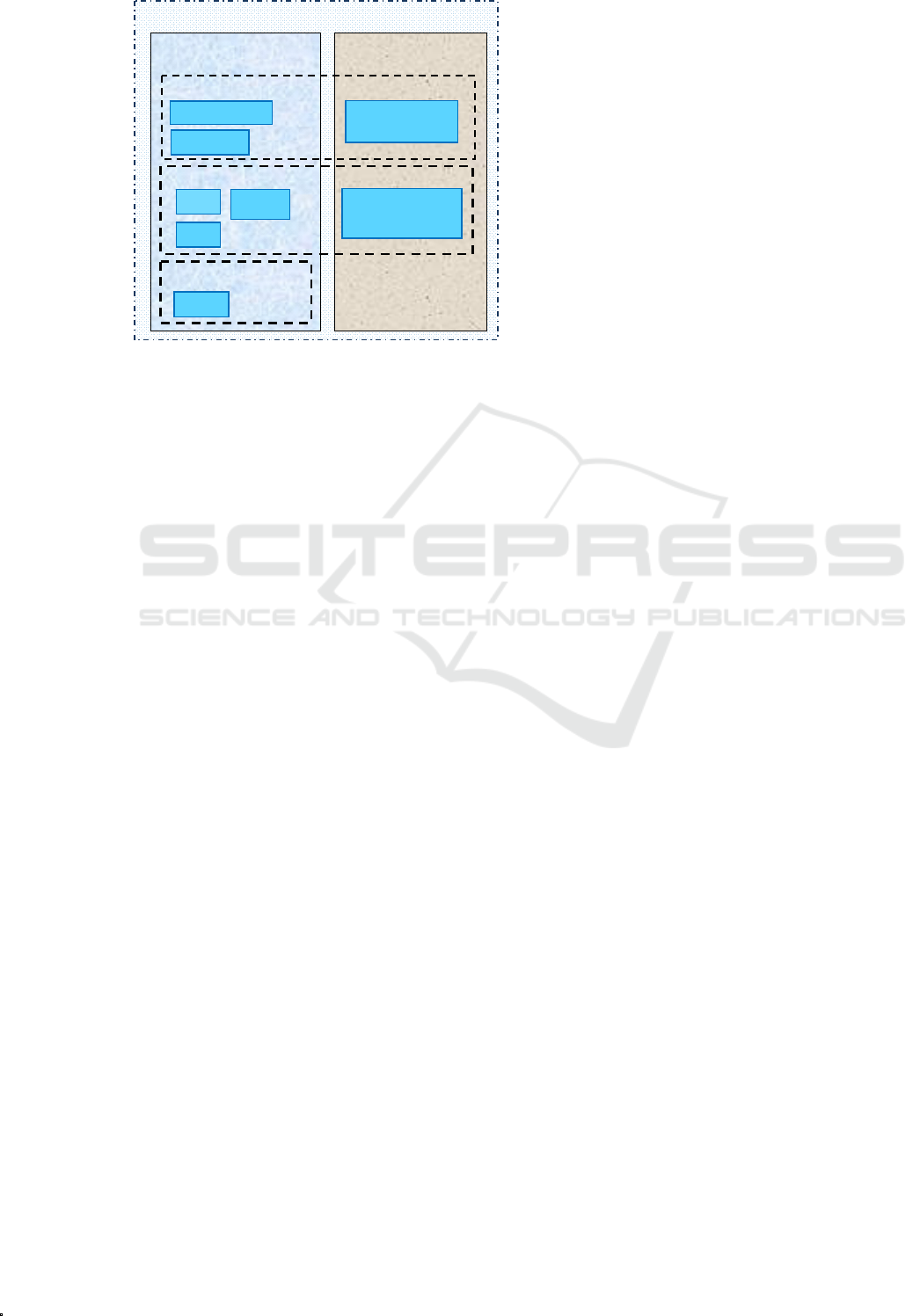
Figure 5: Device level: sensors.
(Abdeldime et al. 2014); media level data, network
and transport was presented by the set of standards
IEEE 1609x designed by Institute of Electrical and
Electronics Engineers in 2013 and 2016; APP level
was described in SAE J2735. Vehicles connected
with infrastructure ITS Road station through V2I
connection using IEEE 802.11 (PSY MAC Wi-Fi),
IEEE 802.11p (Abdeldime et al. 2014), IEEE
802.11b (WAVE) (Al-Fuqaha et al. 2015) or IEEE
802.15.4 (Institute of Electrical and Electronics
Engineers IEEE 2011) with ZigBee protocols
(Herrera-Quintero et al. 2015). Road Station (RS)
connects with IoT infrastructure through IoT
protocols: MQTT was designed by Organization for
the Advancement of Structured Information
Standards (OASIS) in 2014, CoAP was designed by
Internet Engineering Task Force (IETF) in 2014 and
HTML/2 was developed by Internet Engineering
Task Force (IETF) in 2015.
IoT based V2X communication unifies
communication standards and equipment for
communication between vehicles like “things” in
IoT. This fact allows connecting transport systems
not only between each other, but also with other
existing and future systems in different spheres to
realize in the future concept of Internet-of-
Everything.
If vehicle or infrastructure sensor detect a
potential danger, it warns other cars using WAVE
communications or IoT.
3.2.3 IoT Communication with “Things”
Data transmission from the in-vehicle sensors and
driver`s gadgets to the IoT can be direct for internet
enable devices. For devices without IP support we
should use special microchips. This microchip has to
support IoT protocols as well as different required
interfaces of the connecting “thing”. For example,
we can use cheap Raspberry Pi minicomputer to
connect driver`s not IP camera of video recorder to
the IoT.
It is need special gateways with relevant protocols
in order to connect ITS, Vanets and ADAS systems
to the IoT.
3.2.4 Application Level: Proposed Apps
Structure for Safety Problem and
Issues
A number of safety applications have already been
implemented on modern cars using video cameras
and radars, for example algorithms for the
emergency braking assistance (van Ratingen, 2015),
road line detection, map-based location, the abrupt
change of car movement direction using information
about speed, sharp pressing the brake pedal
(Lussereau er al. 2015). Also the dangers can be
recognized on the basis of the evaluation of the cars
movements and drivers behavior (Cheng and
Zongxin 2013).
The designed system based V2X communication
can provide more high level of safety in the driving
assistance system by using external information:
assistance during the passage of the intersection;
help when turning; safe separation from oncoming
vehicle; warning when leaving for highway;
detection of obstacles on the road; information about
the traffic accidents; warning emergency braking;
warning rear collision (e-stop signal); warning lane
change; warning about bad weather conditions;
information on road signs; notification of an
approaching motorcyclist (Fig. 6).
But these systems cannot see around corners. Mostly
they do not connected with infrastructure and use
only onboard sensors. Even if all the cars and
motorcycles will be equipped with V2V, remain
other road users (cyclists, pedestrians), in which this
system is absent.
Designed driver assistance system based on V2X
IoT communication did not present those
disadvantages. Designed system provides
infrastructure notification and also cyclists and
pedestrians can use IoT safety apps to enjoy the
vehicle safety system
However, some problems are remained. The main
problem of proposed system is the low level of the
distribution system, due to relatively high rates
WLAN module. For effective use of the Car-to-X at
least 10-15% of vehicles must be equipped with
Sensors
Infrastructure
/ITS/Smart City
In-vehicle
Video block
Road cameras
networ
k
Car Camera
(
s
)
Car DVR
In-vehicle systems
Lida
r
Navigation block
INS
GPS
A-GPS
Inductive-loop
traffic detectors
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
356
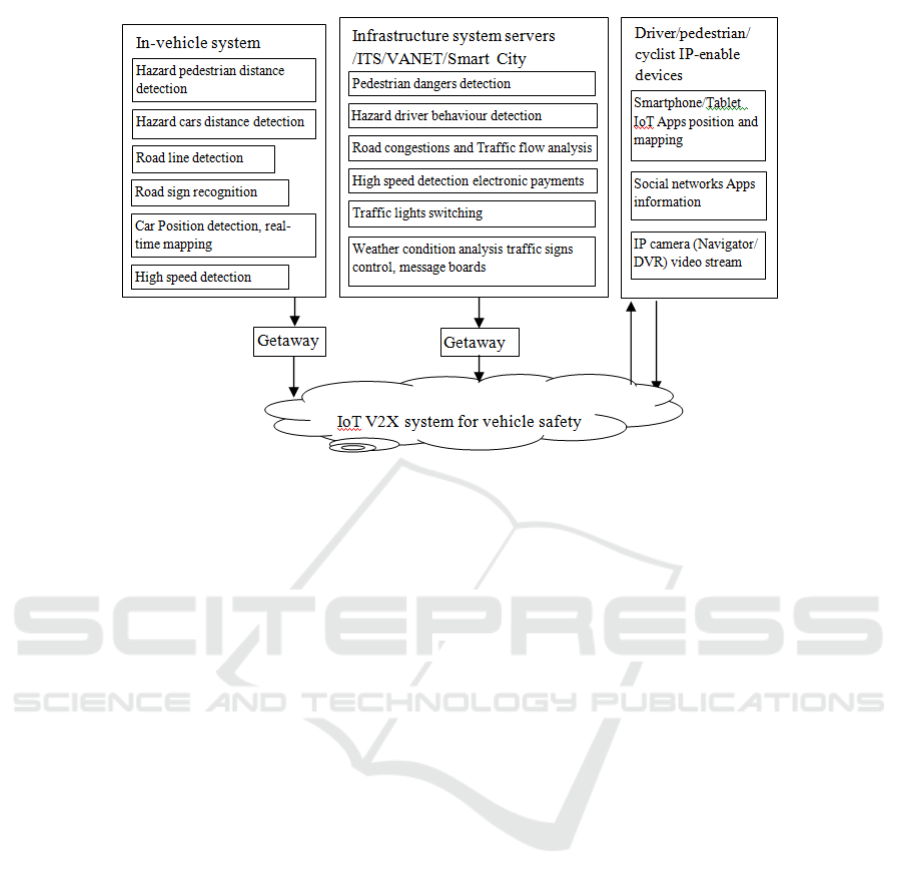
Figure 6: Application level and connection with IoT.
wireless equipment, and it's still very far away.
Another problem is the low system reliability in
determining dangers. When proposed system might
simply overwhelm the driver of various kinds of
information, from which not all are needed for
movement. This, ultimately, will constantly distract
the driver from his primary occupation is driving.
3.3 Application Level: Driver Alert and
Notification
As soon as the vehicle or infrastructure sensors have
detected a potential danger, they warn other drivers
by IoT V2X system.
Smartphone/Tablet Apps provide driver alerts.
Proposed system realizes end-to-end communication
by mobile networks standards GSM/UMTS
(3G)/LTE(4G). Mobile networks use to transmit
notification to the driver alerts subsystem.
For driver alerts in ITS and VANET network on
the App level and network level can use ZigBee
protocol on the top of IEEE 802.15.4 (PSY level).
ZigBee is a low-power WPAN. ZigBee can work
with vehicle networks thanks to ZigBee network
layer supports mesh ad-hoc network (also it supports
point-point and stars network configurations).
By using IoT we suggest significantly simplify
and integrate important functions of driver
assistance to improve safety on the road.
4 CONCLUSIONS AND FUTURE
WORK
We have proposed the approach to the design of the
cooperative ADAS architecture and structure based
on the IoT V2X communications. The proposed
solution is able to collect different kinds of signals
from different sensors and devices to analyze the
traffic situation.
We have developed the DAS architecture
according with IoT reference architecture model and
modern communication standards. Therefore, the
proposed system design is ensure comparability with
different kind of existing in-vehicles and V2I
systems. We are confident that it will allow the use
of important information from other networks for
road safety in the future. It can be Smart grids,
VANET, mobile networks, and even business,
education or social networks. It was shown the way
to present common driver`s sensors and gadgets in
the car like “things” in the IoT. These common
devices can give us a lot of information to improve
safety.
In the further work we presume enormous
opportunities to enhance safety and provide for the
driver wide range warning information like results of
Big data intelligent analyze, event notification,
significant context information would be available.
It can be danger driver alerts, access to appropriate
infrastructure information about current road,
An ADAS Design based on IoT V2X Communications to Improve Safety - Case Study and IoT Architecture Reference Model
357

congestions, significant event from infrastructure or
other cars, potential danger from infrastructure or
other cars for driver alerts or safe active control
systems. IoT-based V2X communication also has
great potential to improve automated vehicle.
REFERENCES
‘10 Breakthrough Technologies 2015’, 2015, MIT
Technology review, viewed 2 December, 2016,
<https://www.technologyreview.com/lists/technologie
s/2015/>
Abdeldime M, Abdelgader, S, Lenan, W 2014 ‘The
Physical Layer of the IEEE 802.11p WAVE
Communication Standard: The Specifications and
Challenges”, in WCECS 2014, San Francisco, USA.
Al-Fuqaha, A, Guizani, M, Mohammadi, M, Aledhari, M,
Ayyash, M 2015, ‘Internet of Things: A Survey on
Enabling Technologies, Protocols, and Applications’,
IEEE Communication Surveys & Tutorials, vol. 17,
no. 4.
Bassi, A, Bauer, M, Fiedler, M, Kramp, T, Van
Kranenburg, R, Lange, S, Meissner, S 2013, Enabling
things to talk: Designing IoT solutions with the IoT
architectural reference model, Berlin, Heidelberg:
Springer International Publishing.
Cheng, C, Zongxin, W 2013 ‘Design of a System for Safe
Driving based on the Internet of Vehicles and the
Fusion of Multi-aspects Information’, in 9
th
International Conference on Computational
Intelligence and Security’, Chengdu, China.
European Telecommunications Standards Institute (ETSI)
2010, Intelligent Transport Systems (ITS);
Communications Architecture (EN 302 665 V1.1.1.),
ETSI standard, Sophia-Antipolis, France.
European Parliament ‘Directive 2010/40/EU of the
European Parliament and of the Council on the
framework for the deployment of Intelligent Transport
Systems in the field of road transport and for
interfaces with other modes of transport’, 2010,
Official Journal of the European Union, viewed 2
December, 2016, <http://eur-
lex.europa.eu/LexUriServ/LexUriServ.do?uri=OJ:L:20
10:207:0001:0013:EN:PDF>
ERTICO-ITS Europe Partnership, 2016, ERTICO-ITS
Europe Partnership, Brussels, viewed 3 December
2016, <http://ertico.com/>
Herrera-Quintero, LF, et al. 2015, ‘IoT approach applied
in the context of ITS: Monitoring Highways through
Instant Messaging’, in 14
th
International Conference
on ITS Telecommunications, Copenhagen, Denmark.
Internet Engineering Task Force (IETF) 2014,
Constrained Application Protocol (CoAP) (RFC
7252), IETF proposed standard, Fremont, California,
USA.
Internet Engineering Task Force (IETF) 2015, Hypertext
Transfer Protocol Version 2 (HTTP/2) (RFC 7540),
IETF proposed standard, Fremont, California, USA.
Institute of Electrical and Electronics Engineers (IEEE)
2011, Standard for Local and metropolitan area
networks-Part 15.4: Low-Rate Wireless Personal Area
Networks (LR-WPANs) (IEEE 802.15.4), IEEE
Standard, Piscataway, New Jersey, USA.
Institute of Electrical and Electronics Engineers (IEEE)
2016, Standard for Wireless Access in Vehicular
Environments (WAVE) - Identifier Allocations (IEEE
1609.12-2016), IEEE Standard, Piscataway, New
Jersey, USA.
Institute of Electrical and Electronics Engineers (IEEE)
2013, IEEE Guide Wireless Access in Vehicle
Environments (WAVE) – Architecture (IEEE 1609.0-
2013), IEEE Standard, Piscataway, New Jersey, USA.
Lussereau, J, Stein, P, David, JA, Rummelhard, L, Negre,
A, Laugier, C, Vignard, N, Othmezouri, G 2015,
‘Integration of ADAS algorithm into an Experimental
Vehicle’, in 2015 IEEE International Workshop on
Advanced Robotics and its Social Impacts (ARSO),
Lyon, France.
Mostafa, A, Vegni, AM, Singoria, R, Oliveira, T, Little, T
and Agrawal, DP 2011 ‘A V2X-based approach for
reduction of delay propagation in Vehicular Ad-Hoc
Networks’, MCL Technical Report no. 07-18-2011.
Network of National ITS Associations, 2016, Introducing
the Network of National Associations, viewed 3
December 2016, <http://itsnetwork.org/>
Organization for the Advancement of Structured
Information Standards (OASIS) 2014, Message
Queuing Telemetry Transport (MQTT) TC version
3.1.1., OASIS Standard, Burlington, USA.
Papadimitratos, P, La Fortelle, A, Evenssen, K, Brignolo,
R, Cosenza, S 2009, ‘Vehicular Communication
Systems: Enabling Technologies, Applications, and
Future Outlook on Intelligent Transportation’, IEEE
Commun. Mag., vol. 47, no.11, pp. 84-95.
Stübing, H, Bechler, M, Heussner, D, May, T, Radusch, I,
Rechner, H, Vogel, P 2010 ‘SimTD: A Car-to-X
System Architecture for Field Operational Tests’,
IEEE Commun. Mag., vol. 48, no.5, pp. 148-154.
Vasseur, JP 2014 ‘The Internet of Things: an Architectural
Foundation and its Protocols’, in Cisco Live Event,
Milan.
van Ratingen, M, Fildes, B, Lie, A, Keall, M, Tingvall, C
2015, ‘Validating Vehicle Safety using Meta-analysis:
a new Approach to Evaluating new Vehicle Safety
Technologies’, in 24th International Technical
Conference on the Enhanced Safety of Vehicles (ESV),
Gothenburg, Sweden.
Wieker, H et al., 2009 ‘Management of Roadside Units for
the SIM-TD Field Test (Germany)’, in 16th World
Congress Exhibition ITS Services, Stockholm,
Sweden.
Zhang, H, He, L 2015 ‘Modeling and Topological
Properties of a V2I Sub Network’, Bulgarian Academy
of Sciences, Cybernetics and information
technologies, vol. 15, no 4, Sofia.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
358
