
Self-learning Trajectory Prediction with Recurrent Neural Networks
at Intelligent Intersections
Julian Bock
1
, Till Beemelmanns
1
, Markus Klösges
1
and Jens Kotte
2
1
Institute for Automotive Engineering, RWTH Aachen University, Aachen, Germany
2
Forschungsgesellschaft Kraftfahrwesen mbH, Aachen, Germany
Keywords: Neural Networks, Machine Learning, Prediction, Intersection, V2x.
Abstract: We present the concept and first results of a self-learning system for road user trajectory prediction at
intersections with connected sensors. Infrastructure installed connected sensors can assist automated vehicles
in perceiving the environment in complex urban scenes such as intersections. An intelligent intersection with
connected sensors can measure the trajectories of road users using multiple sensor types and store the
trajectories. Our approach uses this information to collect a large dataset of pedestrian trajectories. This dataset
is again used to train a pedestrian prediction model with Recurrent Neural Networks. This model learns
intersection specific pedestrian movement patterns. Through a self-learning process enabled by the
measurements of connected sensors, the system continuously improves the prediction during operation while
keeping the dataset preferably small. In this paper, we focus on the prediction of pedestrian trajectories, but
as the approach is data-driven, the system could also predict other road users such as vehicles or bicyclists if
trained with the respective data.
1 INTRODUCTION
As automated driving and advanced driver assistance
systems will play a more and more important role,
anticipating the pedestrian’s future movements is a
valuable task for improving road safety and trajectory
planning (Brouwer et al., 2016; Keller and Gavrila,
2014). Human movement patterns are often uncertain
and depend on many individual influencing factors.
The movement of pedestrians is highly dynamic and
especially urban scenes require an accurate prediction
(Schneider and Gavrila, 2013) Due to the different
driving directions and diverse road participants,
intersections are among the most complex scenarios
for automated driving. Thus, it is a challenging task
to design a model that is able to forecast future
movements of pedestrian at intersections with long
time horizons.
For short-time pedestrian predictions, the head
orientation and arm movement are highly relevant
characteristics, while long-time predictions are rather
goal oriented (Rehder and Kloeden, 2015). Due to
their high relative velocity, vehicles typically monitor
a pedestrian only for a short time making it hard to
interfere the goal of the pedestrian. At an intersection,
connected stationary sensors allow long-time
observations of the pedestrian movement. Those
sensors not just allow a longer observation of a single
pedestrian, but also can be used for the generation of
datasets with large amounts of historical data. Using
this pedestrian historical data, position-dependent
movement patterns of this intersection can be learned
with machine learning approaches to implicitly model
pedestrian goals.
However, the position-dependent movement
patterns might change over time or rare situations
need to be considered, which are not be sufficiently
covered in the learned model. As the infrastructure
sensors are permanently monitoring the intersection,
new measurement data is permanently created. Our
proposed self-learning system is intended to
permanently improve the prediction by re-training the
models with these new measurements. In this re-
training process, the prediction error is considered.
The error of every prediction can easily be calculated
by comparing the prediction with the measurement
after the prediction time. With this continuous re-
training process, rare situations can be incorporated
and the prediction can adapt to changes at the
intersection.
346
Bock, J., Beemelmanns, T., Klösges, M. and Kotte, J.
Self-learning Trajectory Prediction with Recurrent Neural Networks at Intelligent Intersections.
DOI: 10.5220/0006374003460351
In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2017), pages 346-351
ISBN: 978-989-758-242-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 RELATED WORK
Our system builds upon a structure of locally
connected sensors together with a computing unit.
Thus, a short overview on the use of infrastructure
sensors is given first. The data collected by the
infrastructure sensors is processed with machine
learning algorithms for temporal data. This leads to
the current state of research on recurrent neural
networks with focus on sequence prediction.
Although the data-driven method makes it
exchangeable to any other type of road users, the
current state of pedestrian prediction models is
provided. Finally, approaches on continuous learning
are presented.
2.1 Infrastructure Sensors
Research projects such as Ko-FAS (Wertheimer and
others, 2014), I2EASE (I2EASE Consortium, 2016)
and the SADA (Consortium of Project SADA)
examine the use of infrastructure installed sensors for
e.g. cooperative perception. In I2EASE, the
information from stationary infrastructure sensors as
well as moving sensors carried by any road user are
sent via X2X communication to a central intersection
computer. The information from all sensors at the
intersection are combined to a fused list of road user
objects. Project SADA is working on a similar
approach to fuse the data from any sensor.
Just recently (The City of San Diego, 09.03.2017)
announced the installation of 3200 connected smart
sensors in the urban area of San Diego. At least a part
of those sensors will be installed at intersections. This
shows that networked infrastructure sensors are a real
future scenario.
2.2 Recurrent Neural Networks
Neural networks have shown to be capable of solving
many tasks superior to previous methods. While feed
forward neural networks are heavily applied on data
without time dependency, recurrent neural networks
are good for time dependent data through their
possibility to save information from previous steps
inside the network. In the early 90s, (Hochreiter,
01.01.1991) has shown, that there are issues on long-
time dependency information with recurrent neural
networks. A few years later, (Hochreiter and
Schmidhuber, 1997) proposed a method called long
short term memory (LSTM) extending RNNs for
handling longer sequence information.
Learning tasks, which take a sequence of
information over time as input with the goal to
generate again a sequence of information over time,
are called “Sequence to Sequence” learning. LSTMs
have shown to successfully solve Sequence-to-
Sequence problems for several problems such as
language translation (Sutskever et al.) and
handwriting speech recognition (Graves et al., 2013).
(Graves, 2014) used LSTMs for sequence
generating tasks with complex long-ranged time
dependencies. The LSTMs are trained with
handwriting sequences based on tracked pen-tip
trajectories. (Graves, 2014) showed, that the trained
model can generate handwriting samples or
computing the probability distribution of future pen
tip locations. This approach was one of the first
attempts of training X-Y positional data with a RNN-
LSTM inspiring the application of this methodology
to different problems and datasets.
2.3 Pedestrian Prediction
The prediction of pedestrian movement has been
studied for quite some time. Already in the early 90s,
first pedestrian models inspired by physical gas-
kinetics were developed (Helbing, 1990). One of the
first social-forces models was introduced by (Helbing
and Molnar, 1995). This model describes the social-
forces similar to energy potentials based on inter alia
the distance to other pedestrians with respect to the
sphere of privacy and an attraction effect. Helbing et
al. demonstrated in computer simulations, that their
model describes nonlinear interactions of pedestrians.
Furthermore, a recent publication (Brouwer et al.,
2016) introduced four categories of models for
pedestrian prediction, providing an overview of
existing work:
• Class I: Dynamics based pedestrian model
These models are using dynamic information
about the pedestrians such as position, velocity and
moving direction.
• Class II: Pedestrian model using physiological
knowledge
These models consider physiological constraints
of the pedestrian such as the human’s capabilities to
accelerate and change moving direction.
• Class III: Pedestrian model using pedestrian
head orientation information
These models are using head orientation
information of the pedestrian, which is being an
important indicator, whether a pedestrian will cross
the street.
• Class IV: Pedestrian model using environment
information
Self-learning Trajectory Prediction with Recurrent Neural Networks at Intelligent Intersections
347
These models rather focus on the environmental
influence than just information about the pedestrian
itself.
However, the pedestrian prediction problem
cannot be considered as solved. Many of the
pedestrian prediction models since 1990 are
handcrafted models. In the last few years, more data-
driven models were presented.
(Alahi et al.) proposed a data driven model for
predicting human movement with a so called “Social-
LSTM”. In their approach, they considered that the
movement of a person in a crowded scenario is
usually influenced by its direct neighbours. In
contrast to other social models they did not use
handcrafted social forces functions, but designed a
new end-to-end learning architecture that allows an
interaction between spatially proximal sequences
through a pooling layer. The pooling layer ensures
that a LSTM cell has access to the hidden-states of all
other LSTMs in a specific radius and this information
is used for the prediction of the next time step. The
model is evaluated on publicly available pedestrian
tracking datasets showing that their model can
anticipate future movements of individuals caused by
social interactions among them.
2.4 Continuous Learning
Neural networks are commonly trained on fixed
datasets. In the machine learning research
community, static publicly available datasets are used
to compare the performance of different net
architectures and to develop new models (Pellegrini
et al., 2009; Robicquet et al.). However, the human
brain learns continuously something new, since we
live in a permanently changing world (Käding et al.).
There are some studies on neural nets that are trained
with ongoing partially changing or growing datasets.
(Xiao et al., 2014) considered a convolutional
neural network for image classification with an
incrementally increasing dataset. In their approach,
an algorithm hierarchically expands the
convolutional network leading to bigger net
capacities.
A study on continuously learning neural nets with
incoming data streams was performed by (Käding et
al.). The researchers investigated the impact of
training parameters for newly added image data and
their corresponding labels. They found out, that the
effort of retraining a neural net with new data can be
decreased by reducing the number of weight update
iterations. Furthermore, (Käding et al.) state that
neglecting already known data during retraining leads
to overfitting of the new added data. Thus, robust
retraining in a continuous fashion should be
performed with a fraction of new and old data.
3 RESEARCH APPROACH AND
METHODOLOGY
The analysis of related work shows a large potential
in the prediction of road users using recurrent neural
networks. Furthermore, first planned installations
show that an intersection with several connected
sensors measuring the positions of road users is a
possible future scenario. We assume, that the
combination of recent machine learning approaches
such as LSTMs together with the on-going
measurement of connected stationary sensors, can
lead to highly accurate predictions in a local area
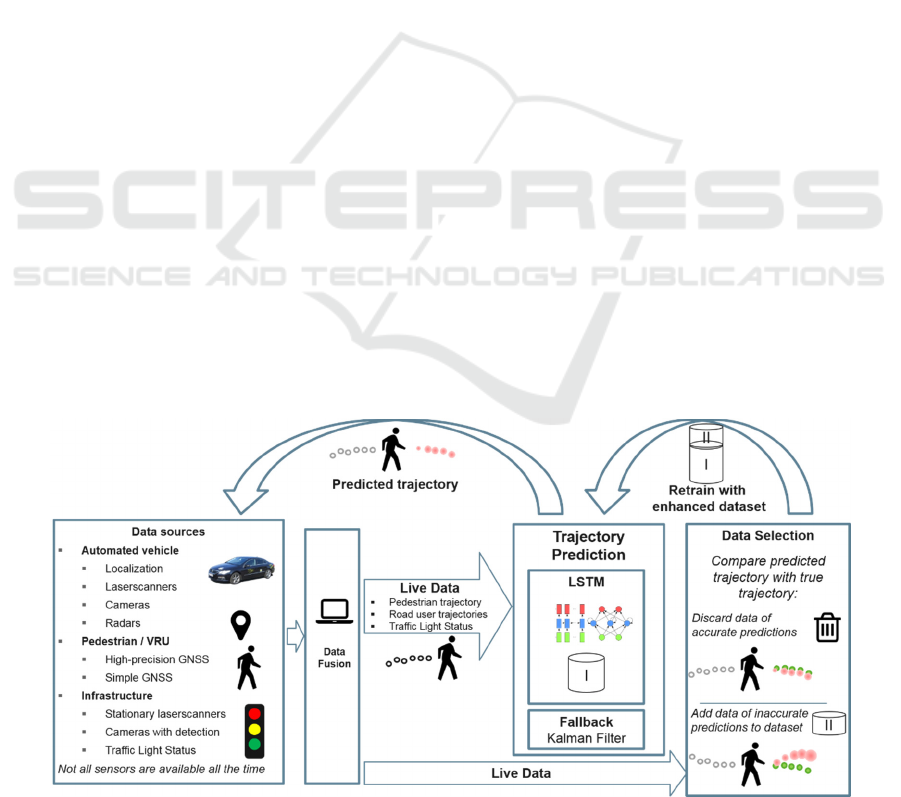
Figure 1: Continuously learning trajectory prediction system.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
348
covered by the sensors. The accuracy can
continuously improve through a self-learning
process. Thus, we present here our concept for a self-
learning trajectory prediction using LSTMs.
Our concept is illustrated in Figure 1. The
proposed system can consider any type of sensor,
which is measuring the positions of pedestrians. An
automated vehicle could provide object lists from
typical sensors such as cameras, radars and
laserscanners. Pedestrians carrying devices with
localization capabilities could provide their position.
Infrastructure sensors such as laserscanners and
cameras could provide object lists. The information is
then sent via cellular X2X or 802.11p X2X to a local
intersection computer, which is collecting all sensor
data. This data is then fused to one description of the
intersection in form of an object list.
For an initial phase, the object lists are collected
at the local intersection computer to create a first
dataset. This dataset does not need to be based on a
consistent sensor setup if an object list is provided
with accuracies. This first dataset A is then used to
train an initial LSTM model LSTM.A. The model
learns to generate a sequence Y with fixed length
using the input sequence X with fixed length. As soon
as the training is finished, LSTM.A can be applied to
predict the future movement from a measured
sequence.
As the measurements at the intersection are
ongoing, the true trajectory of the pedestrian can be
recorded. This data can be used to enlarge the dataset
for the training of the LSTM model. However, due to
the continuous measurements, the dataset would
become exceedingly large if storing all positions
permanently. Thus, as soon as the prediction time has
passed, the predicted trajectory is compared with the
true trajectory giving an error measure for the
prediction. If the prediction error exceeds a certain
threshold, the trajectory is stored in a second dataset
B. After a certain time or size of dataset B, this dataset
B is then used for continued training based on
LSTM.A creating a LSTM.B model. From this
moment on, LSTM.B is applied in the regular
prediction of trajectories and the process is repeated
as just described.
Finally, our prediction concept considers a
fallback on a Kalman Filter. Models learned with
machine learning methods can provide very bad
results if a new situation is not sufficiently covered in
the training dataset and the model does not generalize
well on the data. Our proposed system shall detect,
whether the new input data is sufficiently covered by
the trained model and if not, the prediction of the
Kalman Filter is output by the system.
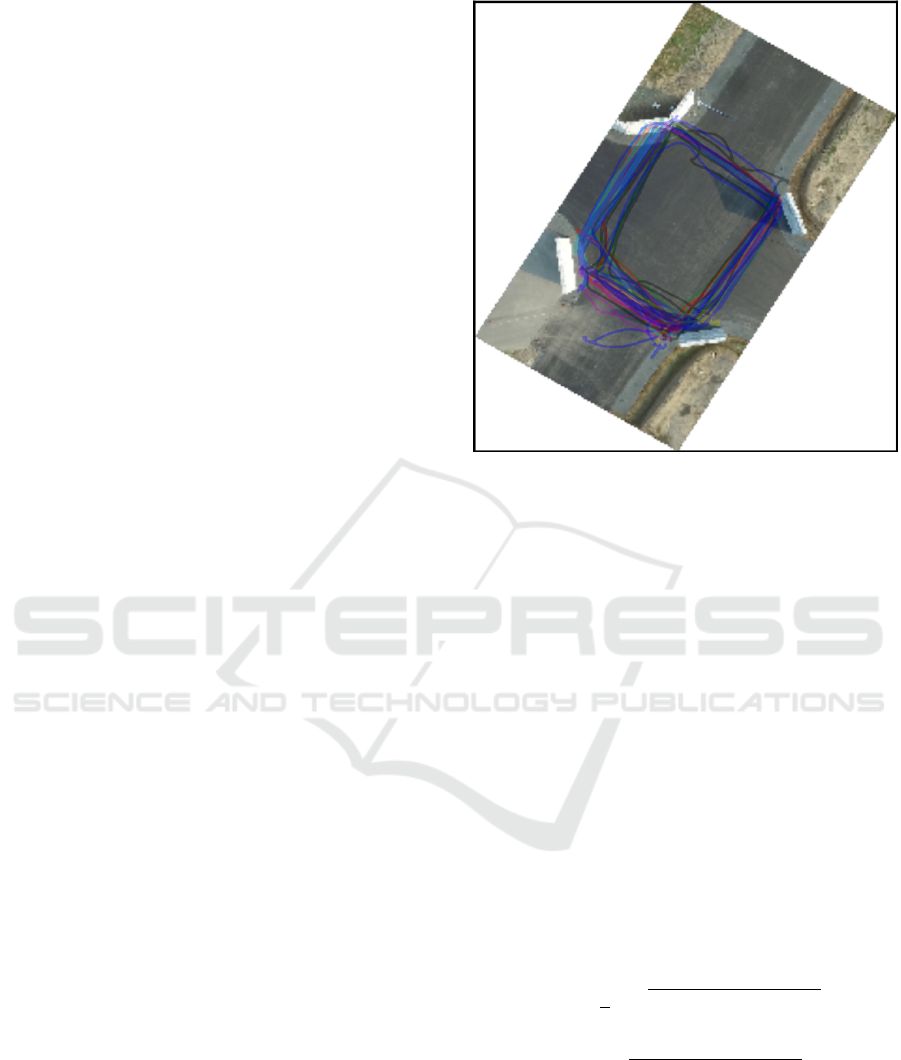
Figure 2: GNSS dataset on research intersection.
4 RESULTS
We implemented a LSTM learning system using the
framework Keras (Chollet, 2015) with Theano (Al-
Rfou et al., 2016) backend. For LSTM training, the
data is normed to a zero mean and unit variance. As
the settings in (Alahi et al.), we use a trajectory
observation time of 3.2 secs and prediction time of
4.8 secs at a sampling rate of 2.5 Hz. At the selected
sampling rate of 2.5 Hz, this results in 8 observation
points and 12 prediction points. We use the mean
displacement error (1) and final displacement error
(2) as criteria for the evaluation of the prediction. The
mean displacement error calculates the average
Euclidean distance between the predicted and
measured position over all time steps. The final
displacement error calculates the Euclidean distance
between the final predicted and measured position.
(
,)=
1
(
−
)
+
(
−
)
(1)
(
,)=
(
−
)
+
(
−
)
(2)
For first experiments, we created an own dataset
with a high-precision pedestrian GNSS positioning
device on a research intersection. This dataset
consists of 9980 positions with 2.5 Hz measurement
rate. The dataset contains the movement of a single
Self-learning Trajectory Prediction with Recurrent Neural Networks at Intelligent Intersections
349

pedestrian walking a distance of about 3.4 km. The
trajectories are visualized in Figure 2.
The results are compared to a Kalman Filter with
constant velocity model. Table 1 shows the results
achieved on the GNSS pedestrian dataset. On both
measurements, mean displacement error and final
displacement error, the LSTM model achieves error
rates similar to those in (Alahi et al.) and surpasses
the Kalman Filter.
Table 1: Results on GNSS pedestrian dataset.
Model
Kalman Filter 0.674 1.257
LSTM model
0.520 1.032
However, for the use of machine learning
methods, this dataset is quite small and by that not
appropriate for investigations on continuous learning.
Thus, we created two datasets with simulated
pedestrian movements using the traffic simulation
software PTV VISSIM. Both datasets are created
using the same intersection model with the only
difference, that in the second dataset one part of the
pedestrian walkway path is changed to a small curve.
This shall depict the change of the pedestrian path due
to an obstacle.
We evaluated based on mean displacement error
for the predicted trajectories depending on the
percentage of additional training data from the second
dataset. Our results show that with just the initial
dataset A, predicted trajectories on a split of dataset B
have high errors of more than 1.1 m. Adding five
percent of a disjoint split of dataset B already reduces
the error significantly to less than 0.1m. Further
adding data is still reducing the error but reaches
saturation at about 40% of the dataset. This shows,
that our method can adapt to changes in the
intersection’s structure and only a part of the new data
is needed for the major error reduction.
5 CONCLUSIONS
A system for self-learning pedestrian trajectory
prediction using LSTMs is introduced and developed.
The system relies on continuous measurements of
pedestrian’s positions at an intersection using
connected sensors. The system can learn local
pedestrian movement patterns at the intersection. The
mean prediction error is continuously reduced by
training the LSTMs again with additional data from
new measurements. The approach is independent of
the used sensor and can be applied to any road user,
for which the sensors deliver position measurements
over time.
Our results show, that the LSTM prediction model
is superior to a constant velocity Kalman Filter for
pedestrian prediction even on small datasets. We
showed that the prediction model can adapt to
changes in the pedestrian walking path using only a
small part of the new data. By that, the size of the
dataset can be kept rather small although depicting
the pedestrian’s movement patterns.
However, as we are currently missing a large real
dataset, our results still mainly rely on simulated data.
Thus, an important focus for future work lies in the
creation of real datasets. There are several
requirements on the datasets. First, the datasets need
to be larger with a duration of several hours. Second,
the datasets need to contain information about the
pedestrian’s dynamic environment and the traffic
light status. Third, the dataset must be a measurement
from an intersection in real traffic.
For the core prediction model, it is planned to
consider the pedestrians’ dynamic environment as
well as traffic light information as input for the
prediction. The self-learning process also needs to be
further enhanced with the goal to build up a good
compromise between adaptability and stability.
Finally, the prediction shall provide an area with
presence probability distribution depending on the
certainty of the measured trajectory.
ACKNOWLEDGEMENTS
This paper is part of the work in the project I2EASE
funded by the German Federal Ministry of Education
and Research based on a decision of the Deutsche
Bundestag.
REFERENCES
Alahi, A., Goel, K., Ramanathan, V., Robicquet, A., Fei-
Fei, L. and Savarese, S. ‘Social LSTM: Human
Trajectory Prediction in Crowded Spaces’ [online]
http://vision.stanford.edu/pdf/CVPR16_N_LSTM.pdf.
Al-Rfou, R., Alain, G., Almahairi, A., Angermueller, C.,
Bahdanau, D., Ballas, N., Bastien, F., Bayer, J.,
Belikov, A., Belopolsky, A., Bengio, Y., Bergeron, A.,
Bergstra, J., Bisson, V., Snyder, J.B., Bouchard, N.,
Boulanger-Lewandowski, N., Bouthillier, X.,
Brébisson, A.d., Breuleux, O., Carrier, P.-L., Cho, K.,
Chorowski, J., Christiano, P., Cooijmans, T., Côté, M.-
A., Côté, M., Courville, A., Dauphin, Y.N., Delalleau,
O., Demouth, J., Desjardins, G., Dieleman, S., Dinh, L.,
Ducoffe, M., Dumoulin, V., Kahou, S.E., Erhan, D.,
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
350

Fan, Z., Firat, O., Germain, M., Glorot, X., Goodfellow,
I., Graham, M., Gulcehre, C., Hamel, P., Harlouchet, I.,
Heng, J.-P., Hidasi, B., Honari, S., Jain, A., Jean, S., Jia,
K., Korobov, M., Kulkarni, V., Lamb, A., Lamblin, P.,
Larsen, E., Laurent, C., Lee, S., Lefrancois, S.,
Lemieux, S., Léonard, N., Lin, Z., Livezey, J.A.,
Lorenz, C., Lowin, J., Ma, Q., Manzagol, P.-A.,
Mastropietro, O., McGibbon, R.T., Memisevic, R., van
Merriënboer, B., Michalski, V., Mirza, M., Orlandi, A.,
Pal, C., Pascanu, R., Pezeshki, M., Raffel, C., Renshaw,
D., Rocklin, M., Romero, A., Roth, M., Sadowski, P.,
Salvatier, J., Savard, F., Schlüter, J., Schulman, J.,
Schwartz, G., Serban, I.V., Serdyuk, D., Shabanian, S.,
Simon, É., Spieckermann, S., Subramanyam, S.R.,
Sygnowski, J., Tanguay, J., van Tulder, G., Turian, J.,
Urban, S., Vincent, P., Visin, F., Vries, H.d., Warde-
Farley, D., Webb, D.J., Willson, M., Xu, K., Xue, L.,
Yao, L., Zhang, S. and Zhang, Y. (2016) ‘Theano: A
Python framework for fast computation of
mathematical expressions’, arXiv e-prints,
abs/1605.02688.
Brouwer, N., Kloeden, H. and Stiller, C. (2016)
‘Comparison and evaluation of pedestrian motion
models for vehicle safety systems’, pp.2207–2212.
Chollet, F. (2015) ‘keras’, GitHub repository.
Consortium of Project SADA ‘Project SADA’.
http://www.projekt-sada.de/ (Accessed 26 January
2016).
Graves, A. (2014) Generating Sequences With Recurrent
Neural Networks. http://arxiv.org/pdf/1308.0850v5.
Graves, A., Mohamed, A.-r. and Hinton, G. (2013) ‘Speech
recognition with deep recurrent neural networks’,
IEEE, pp.6645–6649.
Helbing, D. (1990) ‘Physikalische Modellierung des
dynamischen Verhaltens von Fußgängern (Physical
Modeling of the Dynamic Behavior of Pedestrians)’.
Helbing, D. and Molnar, P. (1995) ‘Social force model for
pedestrian dynamics’, Physical review E, Vol. 51,
No. 5, p.4282.
Hochreiter, S. (01.01.1991) Untersuchungen zu
dynamischen neuronalen Netzen, diploma thesis,
institut für informatik, lehrstuhl prof. brauer, technische
universität münchen.
Hochreiter, S. and Schmidhuber, J. (1997) ‘Long short-term
memory’, Neural computation, Vol. 9, No. 8, pp.1735–
1780.
I2EASE Consortium (2016) ‘I2EASE Project’.
http://www.cerm.rwth-aachen.de/i2ease (Accessed 26
January 2017).
Käding, C., Rodner, E., Freytag, A. and Denzler, J. Active
and Continuous Exploration with Deep Neural
Networks and Expected Model Output Changes.
http://arxiv.org/pdf/1612.06129v1.
Keller, C.G. and Gavrila, D.M. (2014) ‘Will the Pedestrian
Cross? A Study on Pedestrian Path Prediction’, IEEE
Transactions on Intelligent Transportation Systems,
Vol. 15, No. 2 [online]
http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=
6632960.
Pellegrini, S., Ess, A., Schindler, K. and van Gool, L.
(2009) ‘You'll never walk alone: Modeling social
behavior for multi-target tracking’, pp.261–268.
Rehder, E. and Kloeden, H. (2015) ‘Goal-directed
pedestrian prediction’, pp.50–58.
Robicquet, A., Sadeghian, A., Alahi, A. and Savarese, S.
‘Learning Social Etiquette: Human Trajectory
Understanding In Crowded Scenes’, in , Computer
Vision – ECCV 2016.
Schneider, N. and Gavrila, D.M. (2013) ‘Pedestrian path
prediction with recursive Bayesian filters: A
comparative study’, Springer, pp.174–183.
Sutskever, I., Vinyals, O. and Le V, Q. Sequence to
Sequence Learning with Neural Networks.
http://arxiv.org/pdf/1409.3215v3.
The City of San Diego (09.03.2017) ‘Smart City San
Diego’.
https://www.sandiego.gov/sustainability/smart-city.
Wertheimer, R. and others (2014) ‘Ko-PER
Fahrerassistenz und präventive Sicherheit mittels
kooperativer Perzeption: Partnerübergreifender
Schlussbericht’, schlussbericht, Bundesministerium für
Wirtschaft und Technologie (BMWi).
Xiao, T., Zhang, J., Yang, K., Peng, Y. and Zhang, Z.
(2014) ‘Error-driven incremental learning in deep
convolutional neural network for large-scale image
classification’, ACM, pp.177–186.
Self-learning Trajectory Prediction with Recurrent Neural Networks at Intelligent Intersections
351
