
Three-phase Optimal Power Flow for Smart Grids by Iterative
Nonsmooth Optimization
Y. Shi
1
, H.D. Tuan
1
and A.V. Savkin
2
1
Faculty of Engineering and Information Technology, University of Technology Sydney,
2007, Sydney, NSW, Australia
2
School of Electrical Engineering and Telecommunications, The University of New South Wales,
2052, Sydney, NSW, Australia
Keywords:
Three-phase Optimal Power Flow (TOPF), Smart Grids, Rank-one Matrix Constraint, Nonsmooth Optimiza-
tion, Semi-definite Programming (SDP).
Abstract:
Optimal power flow is important for operation and planning of smart grids. The paper considers the so called
unbalanced thee-phase optimal power flow problem (TOPF) for smart grids, which involves multiple quadratic
equality and indefinite quadratic inequality constraints to model the bus interconnections, hardware capacity
and balance between power demand and supply. The existing Newton search based or interior point algorithms
are often trapped by a local optimum while semidefinite programming relaxation (SDR) even fails to locate a
feasible point. Following our previously developed nonsmooth optimization approach, computational solution
for TOPF is provided. Namely, an iterative procedure for generating a sequence of improved points that
converges to an optimal solution, is developed. Simulations for TOPF in unbalanced distributed networks are
provided to demonstrate the practicability and efficiency of our approach.
1 INTRODUCTION
Optimal power flow (OPF) for minimizing the cost of
power generation subject to operating constraints and
meeting demands provides one of the most important
applications of smart grids (Farhangi, 2010).
There are two types of modeling distribution net-
works in smart grid: balanced equivalent single-phase
modelling, which aims at naively approximating the
network by a balanced system of three decoupled
single-phase subsystems, and unbalanced three-phase
modelling, which preserves the unbalanced structure
of the network for constructive power flow analysis
(Yang and Li, 2016). In recent years, more attentions
have been paid to the unbalanced three-phase model-
ling (Kersting, 2007).
The single-phase OPF problem in balanced trans-
mission networks has been more or less well studied
(see e.g. (Lavaei and Low, 2012; Bukhsh et al., 2013;
Madani et al., 2015)). However, the unbalanced three-
phase optimal power flow problem (TOPF) in unba-
lanced networks is still left open with no available ef-
ficient computational solution due its nonlinearity.
The nonlinear power balance equality constraints
of TOPF have been linearized in (Deshmukh et al.,
2012) using the first-order Taylor expansion. As
a result, its found solution is not necessarily feasi-
ble for TOPF. On the other hand, (Abdelaziz et al.,
2013) proposed to combine Newton-Raphson met-
hod and trust region method to handle these nonli-
near constraints, which may lead to a local optimum
only. Furthermore, (Dall’Anese et al., 2013) em-
ployed semi-definite programming relaxation (SDR)
to address the TOPF. Namely, TOPF is equivalently
expressed by a convex semi-definite program (SDP)
with the additional nonconvex matrix rank-one con-
straint. The latter is then dropped for SDR. It has been
claimed in (Dall’Anese et al., 2013) that the optimal
solution of SDR is always turned-out to be rank-one
so it provides the global optimal solution of TOPF.
However, our simulation will show that it is not quite
the case, i.e. the optimal solution of SDR is turned
out to be high rank and as such it cannot provide even
a feasible point for TOPF.
In this paper, we follow the approach of (Phan
et al., 2012; Shi et al., 2015) to provide computati-
onal solution for TOPF. Namely, we develop an effi-
cient iterative procedure, which invokes a SDP in each
iteration to generate a sequence of infeasible points,
which quickly converges to the optimal solution of
Shi, Y., Tuan, H. and Savkin, A.
Three-phase Optimal Power Flow for Smart Grids by Iterative Nonsmooth Optimization.
DOI: 10.5220/0006365803230328
In Proceedings of the 6th International Conference on Smart Cities and Green ICT Systems (SMARTGREENS 2017), pages 323-328
ISBN: 978-989-758-241-7
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
323
TOPF.
The paper is structured as follows. Section II is
devoted to the TOPF model formulation for smart
grids. Section III provides the equivalent matrix opti-
mization formulation. A nonsmooth optimization al-
gorithm for its solution is developed in Section IV.
Section V provides simulation to show the efficiency
of our methods. The conclusions are drawn in Section
VI.
The notations used in this paper are standard. Par-
ticularly, j denotes the imaginary unit, (X)
∗
means
element wise complex conjugate operation of vec-
tor/matrix X, M 0 means the Hermitian symme-
tric matrix M is positive semi-definite, rank(M) and
Tr(M) are the rank and trace of matrix M, respecti-
vely; ℜ(·) and ℑ(·) denote the real and imaginary
parts of a complex quantity. a ≤ b for two complex
numbers a and b is componentwise understood, i.e.
ℜ(a) ≤ ℜ(b) and ℑ(a) ≤ ℑ(b).
2 TOPF STATEMENT
Consider a three-phase network with a set of nodes
N := {1,2,· ·· ,n}. The nodes are connected through
a set of flow lines L ⊆ N × N , i.e. node k is con-
nected to node m if and only if (k, m) ∈ L. Accor-
dingly, N (k) is the set of other nodes connected to
node k. A subset G ⊆ N of nodes is supposed to be
connected to generators. Any node k ∈ N \ G is thus
not connected to generators. Denote by φ ∈ {a,b,c}
the node phase. Accordingly V
φ
k
and I
φ
k
are the com-
plex voltage and current at node k on phase φ.
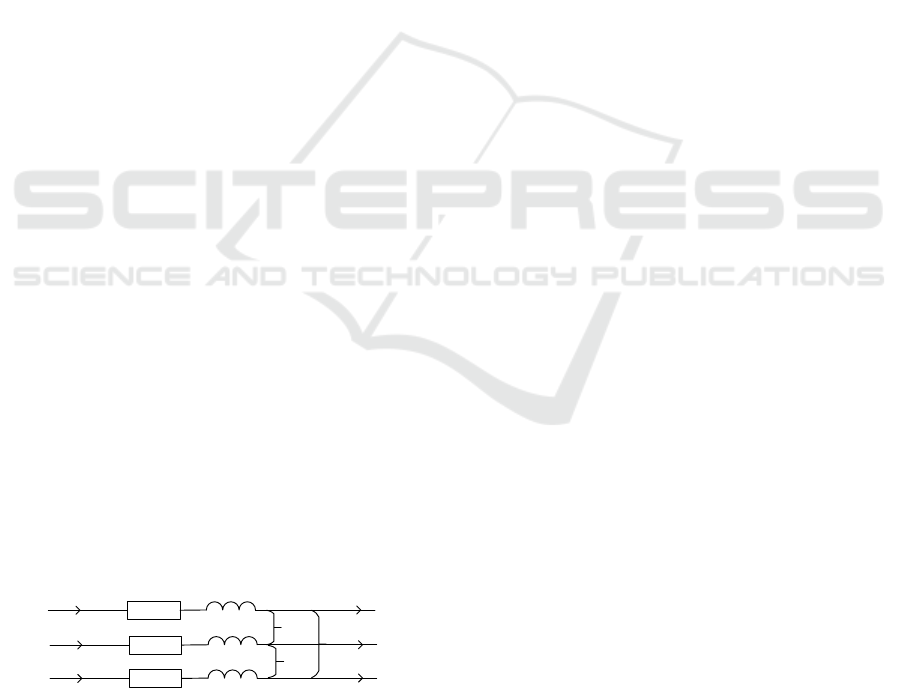
Practically, all loads in smart grids are assumed
constant, while the reactance between the neutral po-
tentials and ground is assumed to be zero. Fig.1 de-
picts the π−equivalent model is used for this three-
phase unbalanced network, which involves both self-
impedance and mutual-impedance with other phase.
Other forms of load models can be easily incorpora-
ted by introducing additional linear terms in the for-
mulation.
a
k
V
b
k
V
c
k
V
aa
ij
Z
bb
ij
Z
cc
ij
Z
ab
ij
Z
bc
ij
Z
ac
ij
Z
a
ij
I
b
ij
I
c
ij
I
a
m
V
b
m
V
c
m
V
Figure 1: Three-phase distributed line model.
Let V
k
= [V
a
k
,V
b
k
,V
c
k
]
T
be the three-phase complex
voltage injected to node k ∈ N , I
km
= [I
a
km
,I
b
km
,I
c
km
]
T
be the three-phase complex current in the power line
(k, m) ∈ L, and y
km
∈ C
3×3
be three-phase admittance
of line (k, m). Then,
I
a
km
I
b
km
I
c
km
=
y
aa
km
y
ab
km
y
ac
km
y
ba
km
y
bb
km
y
bc
km
y
ca
km
y
cb
km
y
cc
km
·
V
a
k
−V
a
m
V
b
k
−V
a
m
V
c
k
−V
a
m
(1)
Other notations are:
• S
km
= [S
a
km
,S
b
km
,S
c
km
]
T
is three-phase apparent po-
wer transferred from node k to node m, S
km
=
P
km
+ jQ
km
, where P
km
and Q
km
represent three-
phase real and reactive line power, respectively;
• S
G
k
= [S
a
G
k
,S
b
G
k
,S
c
G
k
]
T
is three-phase apparent po-
wer injected by node k ∈ G, S
G
k
= P
G
k
+ jQ
G
k
,
where P
G
k
and Q
G
k
represent three-phase real and
reactive generated power, respectively;
• S
L
k
= [S
a
L
k
,S
b
L
k
,S
c
L
k
]
T
is three-phase apparent po-
wer injected by node k ∈ N \G, S
L
k
= P
L
k
+ jQ
L
k
,
where P
L
k
and Q
L
k
represent three-phase real and
reactive load power, respectively;
Let [·]
diag
denote an operator that transport an n × 1
vector to the diagonal of an n × n diagonal matrix.
Then it is obvious that,
S
G
k
− S
L
k
= P
G
k
− P
L
k
+ j(Q
G
k
− Q
L
k
)
= [V
k
]
diag
∑
m∈N (k)
I
∗
km
= [V
k
]
diag
∑
m∈N (k)
[y
∗
km
(V
∗
k
−V
∗
m
)]. (2)
Therefore, we can express the three-phase real ge-
nerated power P
G
k
and reactive generated power Q
G
k
at node k as the following nonconvex quadratic functi-
ons of the node voltage V
k
,
P
G
k
= P
L
k
+ ℜ([V
k
]
diag
∑
m∈N (k)
[y
∗
km
(V
∗
k
−V
∗
m
)]),
Q
G
k
= Q
L
k
+ ℑ([V
k
]
diag
∑
m∈N (k)
[y
∗
km
(V
∗
k
−V
∗
m
)]).
(3)
The objective of TOPF is to minimize the following
cost function of real active generated power P
G
f (P
G
) =
∑
k∈G
∑
φ∈{a,b,c}
(c
k2
(P
φ
G
k
)
2
+ c
k1
P
φ
G
k
+ c
k0
), (4)
where (P
φ
G
k
) are the real generated power on phase φ,
φ ∈ {a,b,c}, c
k2
> 0,c
k1
,c
k0
are given. Substituting
(3) in (4), the objective turns to be a function over bus
voltages V :
f (V ) =
∑
k∈G
∑
φ∈{a,b,c}
(c
k2
(P
φ
L
k
+ ℜ([V
k
]
diag
∑
m∈N (k)
[y
∗
km
(V
∗
k
−V
∗
m
)])
φ
)
2
+ c
k1
(P
φ
L
k
+ ℜ([V
k
]
diag
∑
m∈N (k)
[y
∗
km
(V
∗
k
−V
∗
m
)])
φ
) + c
k0
). (5)
SMARTGREENS 2017 - 6th International Conference on Smart Cities and Green ICT Systems
324

Accordingly, TOPF problem is formulated as
min
V ∈C
n
f (V ) s.t. (6a)
−P
L
k
− jQ
L
k
= [V
k
]
diag
∑
m∈N (k)
[y
∗
km
(V
∗
k
−V
∗
m
)],∀k ∈ N \ G (6b)
P
min
G
k
≤ P
L
k
+ ℜ([V
k
]
diag
∑
m∈N (k)
[y
∗
km
(V
∗
k
−V
∗
m
)]) ≤ P
max
G
k
,∀k ∈ G (6c)
Q
min
G
k
≤ Q
φ
L
k
+ ℑ([V
k
]
diag
∑
m∈N (k)
[y
∗
km
(V
∗
k
−V
∗
m
)]) ≤ Q
max
G
k
,∀k ∈ G (6d)
(V
φ
k
)
min
≤ |V
φ
k
| ≤ (V
φ
k
)
max
,∀k ∈ N (6e)
|S
km
| = |[V
k
]
diag
[y
∗
km
(V
∗
k
−V
∗
m
)]| ≤ S
max
km
,
∀(k, m) ∈ L (6f)
|V
φ
k
−V
φ
m
| ≤ (V
φ
km
)
max
,∀(k,m) ∈ L (6g)
∀φ ∈ {a,b,c}.
where
• (6b) is the equation of the balance between the
demand and supply power at the load node k ∈
N \ G;
• (6c)-(6d) are the power generation bounds, where
(P
φ
G
k
)
min
, (Q
φ
G
k
)
min
and (P
φ
G
k
)
max
, (Q
φ
G
k
)
max
are the
lower bound and upper bound of the real power
reactive power generations on phase φ, respecti-
vely;
• (6e) are the voltage amplitude bounds;
• (6f)-(6g) are capacity limitations, where line cur-
rents between the connected nodes are constrai-
ned by (6f), while (6g) guarantees the voltage dif-
ference in terms of their magnitude (Zimmerman
et al., 2011);
3 MATRIX RANK-ONE
CONSTRAINED
OPTIMIZATION FOR TOPF
Define
V := [V
T
1
,··· ,V
T
n
]
T
∈ C
3n
and
I := [I
T
1
,··· ,I
T
n
]
T
∈ C
3n
,
where V
n
and I
n
are the complex three-phase voltage
and current respectively. Define a symmetric block
matrix Y ∈ C
3n×3n
, with diagonal block
∑
m∈N (k)
y
km
and off-diagonal block −y
km
. Set y
km
= 0 if node k
and m are not connected. The Ohm’s law is written as
I = YV.
The voltage inserted at node k of phase φ can be
expressed by
V
φ
k
= (e
φ
k
)
T
V, φ ∈ a,b, c (7)
where e
φ
k
= [0
1×3(k−1)
, ¯e
φ
k
,0
1×3(n−k)
]
T
, ¯e
φ
denotes the
canonical basis of R
3
.
Under the definition of the outer product matrix
W = VV
H
, for each phase φ, constraint (6b) becomes
a linear function of W as follows,
−P
φ
L
k
− jQ
φ
L
k
= V
φ
k
(I
φ
k
)
∗
= (V
H
e
φ
k
(e
φ
k
)
T
YV )
H
= Tr(Y
φ
k
W ), (8)
where Y
φ
k
= e
φ
k
(e
φ
k
)
T
Y .
Similarly, the injected real and reactive powers
corresponding to constraint (6c)and (6d) can be ex-
pressed by the following linear constraints in W :
P
φ
L
k
+ ℜ(V
φ
k
∑
m∈N (k)
[y
∗
km
(V
∗
k
−V
∗
m
)]
φ
) = (9)
P
φ
L
k
+ Tr(1/2(Y
φ
k
+ (Y
φ
k
)
H
)W )
Q
φ
L
k
+ ℑ(V
φ
k
∑
m∈N (k)
[y
∗
km
(V
∗
k
−V
∗
m
)]
φ
) = (10)
Q
φ
L
k
+ Tr( j/2(Y
φ
k
− (Y
φ
k
)
H
)W )
Constraint (6e) is also linear in W because
|V
φ
k
|
2
= (V
φ
k
)
∗
V
φ
k
= V
H
e
φ
k
(e
φ
k
)
T
V
= Tr(e
φ
k
(e
φ
k
)
T
W ) (11)
Next, define complex matrix A
km
and B
k
as,
A
km
: = [0
3×3(k−1)
,y
km
,0
3×3(m−k−1)
,
−y
km
,0
3×3(n−m)
]
3×n
B
k
: = [0
3×3(k−1)
,1
3×3
,0
3×3(n−k)
]
3×n
.
Then, it is obvious that I
φ
km
= (y
km
(V
k
− V
m
))
T
¯e
φ
=
(A
km
V )
T
¯e
φ
,V
φ
k
= (B
k
V )
T
¯e
φ
, ¯e
φ
denotes the ca-
nonical base of R
3
, thus, S
φ
km
= V
φ
k
(I
φ
km
)
∗
=
V
H
B
k
¯e
φ
( ¯e
φ
)
T
A
km
V = Tr(B
k
¯e
φ
( ¯e
φ
)
T
A
km
W ). There-
fore, the line flow constraint (6f) can be re-expressed
by
|S
φ
km
| = |Tr(B
k
¯e
φ
( ¯e
φ
)
T
A
km
W )| ≤ (S
km
)
max
,∀(k,m) ∈ L
(12)
Three-phase Optimal Power Flow for Smart Grids by Iterative Nonsmooth Optimization
325

Similarly, the line flow constraint (6g) can be re-
expressed by
|V
φ
k
−V
φ
m
|
2
= V
H
(B
k
− B
m
)
H
¯e
φ
( ¯e
φ
)
T
(B
k
− B
m
)V
= Tr((B
k
− B
m
)
H
¯e
φ
( ¯e
φ
)
T
(B
k
− B
m
)W )
≤ (V
φ
km
)
max
,∀(k,m) ∈ L
(13)
In summary, TOPF (6) is reformulated by the follo-
wing optimization problem in matrix W ∈ C
3n×3n
,
min
W ∈C
3n×3n
F(W ) s.t. (14a)
−P
L
k
− jQ
L
k
= Tr(Y
φ
k
W ),∀k ∈ N \ G, (14b)
(P
φ
G
k
)
min
≤ P
φ
L
k
+ Tr(1/2(Y
φ
k
+ (Y
φ
k
)
H
)W )
≤ (P
φ
G
k
)
max
,∀k ∈ G (14c)
Q
min
G
k
≤ Q
φ
L
k
+ Tr( j/2(Y
φ
k
− (Y
φ
k
)
H
)W )
≤ Q
max
G
k
,∀k ∈ G (14d)
(V
min
k
)
2
≤ Tr( ¯e
φ
k
( ¯e
φ
k
)
T
W ) ≤ (V
max
k
)
2
,∀k ∈ N (14e)
|Tr(B
k
e
φ
(e
φ
)
T
A
km
W )| ≤ (S
km
)
max
,∀(k,m) ∈ L (14f)
Tr((B
k
− B
m
)
H
¯e
φ
( ¯e
φ
)
T
(B
k
− B
m
)W )
≤ (V
max
km
)
2
,∀(k,m) ∈ L (14g)
W 0, (14h)
rank(W ) = 1, (14i)
where
F(W ) =
∑
k∈G
[c
k2
(P
φ
L
k
+ Tr(1/2(Y
φ
k
+ (Y
φ
k
)
H
)W ))
2
+c
k1
(P
φ
L
k
+ Tr(1/2(Y
φ
k
+ (Y
φ
k
)
H
)W ))
+c
k0
], (15)
which is convex quadratic in W .
As all constraints (14b)-(14h) are linear, the difficulty
of (14) is now concentrated at the nonconvex matrix
rank-one constraint (14i). The existing SDRs, such as
(Lavaei and Low, 2012) and (Dall’Anese et al., 2013)
simply drop the only nonconvex constraint (14i) to
have the SDP (14a)-(14h). If the optimal solution of
this SDR is of rank-one, i.e. it satisfies the nonconvex
rank-one constraint (14i) then it obviously leads to
the global optimal solution of the nonconvex program
(14). Otherwise, SDR cannot provide even feasible
point to the original TOPF (6). In the next section
we will provide an efficient computational nonsmooth
algorithm for the optimal solution of the nonconvex
problem (14).
4 NONSMOOTH OPTIMIZATION
ALGORITHM FOR TOPF
In this section, followed by our previous work (Shi
et al., 2015), a nonsmooth optimization algorithm is
proposed to deal with the nonconvex rank-one con-
straint (14i) in program (14). Firstly, the rank-one
constraint (14i) is equivalently expressed by the fol-
lowing spectral constraint
Trace(W) − λ
max
(W ) ≤ 0, (16)
where λ
max
(W ) stands for the maximal eigenvalue of
W .
Instead of dealing with the nonconvex constraint
(16), we incorporate it into the objective, leading to
the following formulation
min
W ∈C
3n×3n
F(W )+ µ(Trace(W ) − λ
max
(W )) s.t.
(14b) − (14h), (17)
where µ > 0 is a penalty parameter. The above pe-
nalization is exact because the constraint (16) can be
satisfied by a minimizer of (14) with a finite value of
µ. On the other hand, any feasible W to (14) is also fe-
asible to (17), implying that the optimal value of (14)
for any µ > 0 is upper bounded by the optimal value
of (17).
Function λ
max
(W ) is nonsmooth but is lower
bounded by a linear function as the following relation
shows (Tuan et al., 2000):
λ
max
(W ) ≥ λ
max
(W
(κ)
) + (w
(κ)
max
)
H
(W −W
(κ)
)w
(κ)
max
= (w
(κ)
max
)
H
W w
(κ)
max
, ∀W 0. (18)
Here, w
(κ)
max
is the eigenvector corresponding to the ei-
genvalue λ
max
(W
(κ)
).
Therefore, for any W
(κ)
feasible to convex con-
straints (14b)-(14h), the following SDP yields an up-
per bound for nonconvex program (17)
min
W ∈C
3n×3n
F
(κ)
(W ) := F(W ) + µ[Trace(W )−
(w
(κ)
max
)
H
W w
(κ)
max
] s.t. (14b) − (14h)
(19)
because
F
(κ)
(W ) ≥ F(W )+µ(Trace(W )−λ
max
(W )) ∀ W 0
according to (18).
By Algorithm 1, we provide an iterative compu-
tational procedure for computing (14). Its initial step
is to solve SDP (20), which is a SDR for (14) so its
optimal value is a lower bound for (14).
SMARTGREENS 2017 - 6th International Conference on Smart Cities and Green ICT Systems
326

Algorithm 1: Nonsmooth Optimization Algorithm for the
unbalanced TOPF problem.
1: Initialize κ := 0 and solve the SDP
min
W ∈C
3n×3n
F(W ) s.t. (14b) − (14h) (20)
to find its optimal solution W
(κ)
. Stop the algo-
rithm if
Trace(W
(κ)
) − (w
(κ)
max
)
H
W
(κ)
w
(κ)
max
≤ ε (21)
and accept W
(κ)
as the optimal solution of the
nonconvex program (6).
2: repeat
3: Solve the convex program (19), to find the op-
timal solution W
(κ+1)
4: Set κ := κ + 1.
5: until
Trace(W
(κ)
) − (w
(κ)
max
)
H
W
(κ)
w
(κ)
max
≤ ε. (22)
6: Accept W
(κ)
as a found solution of (6).
Suppose that W
(κ+1)
is the optimal solution of
SDP (19). Since W
(κ)
is also feasible to (19), it is
true that
F(W
(κ)
) + µ(Trace(W
(κ)
) − λ
max
(W
(κ)
)) =
F
(κ)
(W
(κ)
) ≥
F
(κ)
(W
(κ+1)
) =
F(W
(κ+1)
) + µ(Trace(W
(κ+1)
) − λ
max
(W
(κ+1)
)),
so W
(κ+1)
is better solution of (17) than W
(κ)
.
5 SIMULATION RESULTS
The hardware and software facilities for our compu-
tational implementation are:
• Processor: Intel(R) Core(TM) i5-3470 CPU
@3.20GHz;
• Software and toolbox : Matlab version R2015b;
CVX (Grant and Boyd, 2014) with Sedumi
(Sturm, 1999) to solve SDP (19).
• tolerance: ε = 10
−4
is set for the stop criterion
(22) of Algorithm 1, which is applied to solutions
of all cases.
To demonstrate the efficiency of our nonsmooth
optimization algorithm, the following two cases are
tested.
5.1 Six-node Network
This six-node three-phase network is a modifica-
tion from the unbalanced network from (Sanseverino
et al., 2015), which is depicted by Fig. 2. There are
six nodes with three distributed generators and five li-
nes, which lead to three nonlinear equality constraint
in (6b). The size of the Hermitian symmetric ma-
trix variable W is 18 × 18. The coefficients of the
power cost are set by c
k2
= 0, c
k1
= 4 and c
k0
= 10
for each node and phase, respectively. The minimum
and maximum capacity of service voltage are set by
V
min
k
= 0.95pu, V
min
k
= 1.05pu for all nodes. The ini-
tial iteration of Algorithm 1 found rank(W
(0)
) = 8
with power cost 1086 ($/h), which is only a lower
bound of TOPF (14). SDR thus can not lead to feasi-
ble point for the original TOPF (6). After 5 iterations,
Algorithm 1 yields a rank-one solution with the po-
wer cost 1125 ($/h), with a 3.5% increase compared
to the lower bound 1086 ($/h).
DG1 DG2 DG3
4
5
6
Figure 2: Topology of the 6-node three-phase network.
5.2 Ten-node Network
This ten-node three-phase network is a modifi-
cation of the unbalanced network modified from
(Dall’Anese et al., 2013), which is depicted by Fig.
3. There are ten nodes with two distributed generators
and nine lines, which lead to eight nonlinear equality
constraint in (6b). The size of the Hermitian symme-
tric matrix variable W is 30 × 30. The coefficients of
the power cost are set by c
k2
= 0, c
k1
= 6 and c
k0
= 30
for each node and phase, respectively. The minimum
and maximum capacity of service voltage are set by
V
min
k
= 0.95pu, V
min
k
= 1.05pu for all nodes. The ini-
tial iteration of Algorithm 1 found rank(W
(0)
) = 12
with power cost 1573 ($/h), which is only a lower
bound of TOPF (14). Again SDR can not find even
a feasible point for original TOPF (6). After ten itera-
tions, the nonsmooth optimization Algorithm 1 yields
a rank-one matrix solution with the power cost 1652
($/h), which is a 5.0% increase compared to the lower
bound 1573 ($/h).
Three-phase Optimal Power Flow for Smart Grids by Iterative Nonsmooth Optimization
327

DG5 DG7
1
2
3
8
4
6
9
10
Figure 3: Topology of the 10-node three-phase network.
6 CONCLUSIONS
TOPF is a very computationally difficult problem as
it involves multiple quadratic equality and indefinite
quadratic inequality constraints of the bus intercon-
nections, hardware operating capacity and balance be-
tween power demand and supply. We have proposed
an iterative nonsmooth algorithm for its computatio-
nal solution. The provided simulations demonstrate
its merit. Its applications to larger scale TOPFs are
currently under consideration.
REFERENCES
Abdelaziz, M. M. A., Farag, H. E., El-Saadany, E. F., and
Mohamed, Y. A. R. I. (2013). A novel and genera-
lized three-phase power flow algorithm for islanded
microgrids using a Newton trust region method. IEEE
Trans. Power Systems, 28(1):190–201.
Bukhsh, W., Grothey, A., McKinnon, K., and Trodden, P.
(2013). Local solutions of the optimal power flow pro-
blem. IEEE Trans. Power Systems, 28(4):4780–4788.
Dall’Anese, E., Zhu, H., and Giannakis, G. B. (2013).
Distributed optimal power flow for smart microgrids.
IEEE Trans. Smart Grid, 4(3):1464–1475.
Deshmukh, S., Natarajan, B., and Pahwa, A. (2012).
Voltage/var control in distribution networks via re-
active power injection through distributed generators.
IEEE Trans. Smart Grid, 3(3):1226–1234.
Farhangi, H. (2010). The path of the smart grid. IEEE
Power and Energy Magazine, 8:18–28.
Grant, M. and Boyd, S. (2014). CVX: Matlab soft-
ware for disciplined convex programming, version
2.1. http://cvxr.com/cvx.
Kersting, W. H. (2007). Distribution System Modeling and
Analysis. Boca Raton, FL, USA: CRC, 2rd edition.
Lavaei, J. and Low, S. H. (2012). Zero duality gap in opti-
mal power flow problem. IEEE Trans. Power Systems,
27(1):92–107.
Madani, R., Sojoudi, S., and Lavaei, J. (2015). Convex re-
laxation for optimal power flow problem: Mesh net-
works. IEEE Trans. Power Systems, 30:199–211.
Phan, H. A., Tuan, H. D., Kha, H. H., and Ngo, D. T. (2012).
Nonsmooth optimization for efficient beamforming in
cognitive radio multicast transmission. IEEE Trans.
Signal Processing, 60(6):2941–2951.
Sanseverino, E. R., Quang, N. N., Di Silvestre, M. L., Guer-
rero, J. M., and Li, C. (2015). Optimal power flow in
three-phase islanded microgrids with inverter interfa-
ced units. Electric Power Systems Research, 123:48–
56.
Shi, Y., Tuan, H. D., and Su, S. (2015). Nonsmooth opti-
mization for optimal power flow. In Proc. of the 3rd
IEEE Global Conference on Signal and Information
Processing, pages 1–4.
Sturm, J. F. (1999). Using SeDuMi 1.02: A Matlab tool-
box for optimization over symmetric cones. Optim.
Methods Software, 11-12:625–653.
Tuan, H. D., Apkarian, P., Hosoe, S., and Tuy, H. (2000).
D.c. optimization approach to robust controls: the fe-
asibility problems. Inter. J. of Control, 73:89–104.
Yang, F. and Li, Z. (2016). Effects of balanced and un-
balanced distribution system modeling on power flow
analysis. In Proc. of 2016 IEEE Power Energy So-
ciety Innovative Smart Grid Technologies Conference
(ISGT), pages 1–5.
Zimmerman, R. D., Murillo-Sanchez, C. E., and Thomas,
R. J. (2011). Matpower: Steady-state operations,
planning, and analysis tools for power systems re-
search and education. IEEE Trans. Power Systems,,
26(1):12–19.
SMARTGREENS 2017 - 6th International Conference on Smart Cities and Green ICT Systems
328
