
An Experimental Model for In-vehicle Networks and Subsystems
Bogdan Groza, Horatiu Gurban and Pal-Stefan Murvay
Department of Automatics and Applied Informatics, Politehnica University of Timisoara, Romania
Keywords:
In-vehicle Networks, Automotive Security, Embedded Devices.
Abstract:
We pursue an experimental setup that gathers various in-vehicle networks and subsystems that are critical
from a security perspective. As cyber-attacks to cars have become a reality, the model comes handy for both
research and engineering education. The usefulness of this empirical model stems from both being helpful
in creating a realistic view on the security of automotive systems and for creating security awareness. We do
congregate in our setup various communication buses, e.g., CAN, LIN and FlexRay, and bring connectivity
between several low and high-end automotive-grade development boards that are linked to off-the-shelf in-
vehicle components, e.g., an instrument cluster and an infotainment unit, etc. The setup serves as a concise and
practical representation of in-vehicle subsystems, network topologies and highlights security implications.
1 MOTIVATION
Contemporary cars are the result of an evolution that
spans over more than a century. While most of the
electronic technologies inside cars were designed in
the past few decades, there is a high degree of hetero-
geneity in modern vehicles in terms of both existing
subsystems and networks. Recently, a new challenge
has emerged for vehicular technologies: designing se-
curity solutions to withstand adversarial threats simi-
lar to what already exists in the world of modern com-
puters.
In the light of the recently reported attacks on in-
vehicle networks (Checkoway et al., 2011), (Koscher
et al., 2010), as both academic researchers and the in-
dustry are working on designing solutions to threats
that have not been envisioned in the past, it becomes
necessary to bring experimental models both for re-
searchers and for engineers in order to make them fa-
miliar with existing targets and attack surfaces inside
a car. In this work we target the design of an experi-
mental model that can be used for both testing secu-
rity solutions and creating awareness.
The security community has been constantly
aware that security by itself is not a product but a pro-
cess. Consequently it is not possible to design secu-
rity solutions disconnected from the system were they
finally reside. The situation is not at all distinct when
devising security for in-vehicle networks or compo-
nents. Designing security solutions can clearly ben-
efit from an experimental setup that offers a general
view of in-vehicle buses and subsystems. This assists
a more realistic perspective in designing such solu-
tions and offers a potential testbed where solutions
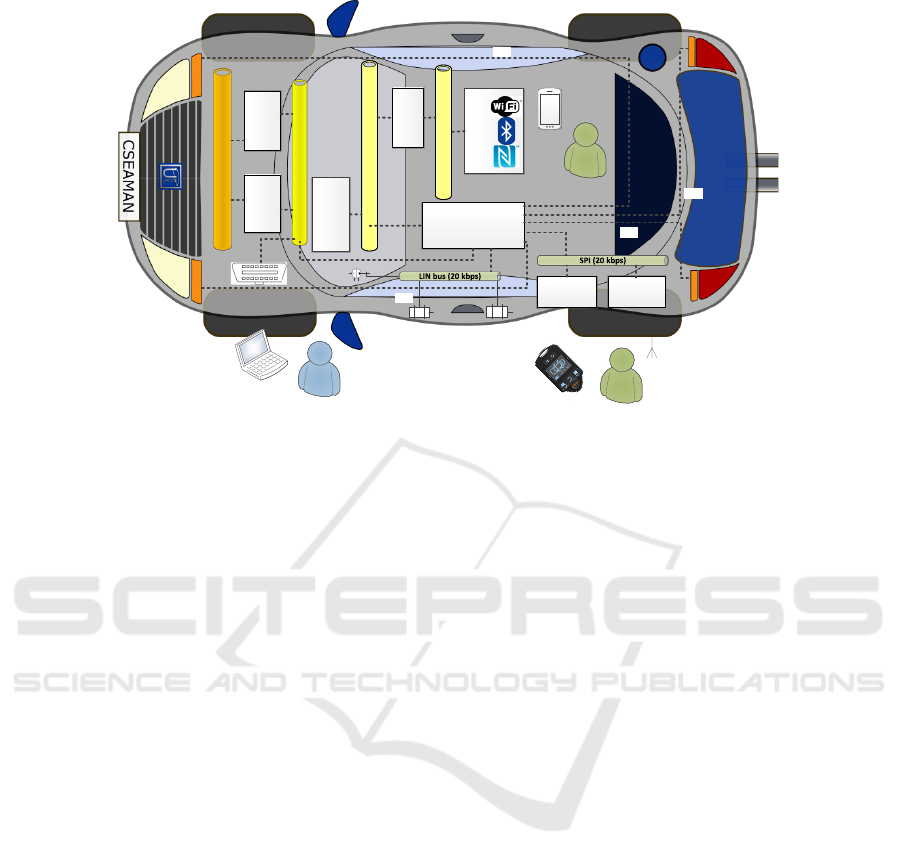
can be put in practice. We portray the experimental
setup that we design in Figure 1 and precise details
on the components will be given in a forthcoming sec-
tion.
We structure our presentation as follows. In sec-
tions 2 we discuss the attack surfaces and targets in
terms of in-vehicle buses and vehicular subsystems
that are common targets for such attacks and relevant
for our model along with some useful tools for attack-
ing in-vehicle networks. In section 3 we discuss ex-
isting security solutions while section 4 gives details
on the experimental setup. Section 5 holds the con-
clusion of our work.
2 NETWORKS AND
SUBSYSTEMS
We give a brief description of communication buses,
subsystems and attack tools that are target of our ex-
perimental setup.
2.1 Communication Buses
We enumerate the most relevant communication
buses and interfaces in the automotive industry:
1. the CAN bus (Controller Area Network) is one of
the first buses adopted by the automotive industry
and still largely used in this area. It is currently
326
Groza, B., Gurban, H. and Murvay, P-S.
An Experimental Model for In-vehicle Networks and Subsystems.
DOI: 10.5220/0006360103260331
In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2017), pages 326-331
ISBN: 978-989-758-242-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
FlexRay
(high speed
,
10
Mbps
)
TPMS Sensor (Infineon SP37)
Technician
CAN
(low speed
,
125
kbps
)
Instrument Cluster
BCM
(Freescale S12)
Notebook
(Diagnosis tools,
CANoe, etc)
TPMS
(receiver IC)
User
RF-Key receiver
(MSP430)
CAN
(high speed
,
1
Mbps
)
Engine ECU
(Freescale S
12
)
CHASIS ECU
(Freescale S
12
)
User
Infotainment
Unit
Firewall
/IDS
(Freescale S
12
)
GPIO
GPIO
GPIO
CAN
(low speed
,
125
kbps
)
window
actuator
door
actuator
GPIO
Smartphone
rain-light sensor
Figure 1: The experimental setup targeted by our work.
available in three forms: low-speed fault tolerant
CAN (up to 125 kbps, defined in ISO11898-3),
high-speed CAN (up to 1Mbit ISO11898-2) and
the more recently proposed CAN-FD (CAN with
Flexible Data-Rate) which improves the transmis-
sion rate allowing bit-rates of up to 5 Mbps. In
addition, CAN-FD increases the maximum pay-
load of a message to 64 bytes instead of 8 in the
classical CAN.
2. FlexRay is an automotive bus designed to fulfill
the communication requirements of X-by-Wire
Systems. It is mostly intended for scenarios where
high bit-rates are required (up to 2 channels at
10Mbps) and uses TDMA(Time Division Multi-
ple Access) as access method (which assures fixed
communication latency). Due to the higher hard-
ware cost and the increased complexity of the re-
quired software drivers, FlexRay may fail to en-
tirely replace CAN but it is generally used to in-
terconnect safety-critical ECUs.
3. LIN (Local Interconnect Network) is a serial bus
designed to complement CAN networks, offering
a cost efficient solution for connecting sensors and
actuators in small networks where the maximum
speed cannot exceed 20kbps. It is generally used
for peripherals.
4. Wireless transmission standards from the con-
sumer electronic market such as WiFi and Blue-
tooth are now being available in both low and
high-end vehicles. This comes with benefits for
the driver and passengers by allowing the interac-
tion between the vehicle and smart electronic de-
vices, e.g., phones, tablets and watches, and defi-
nitely adds new challenges from the security per-
spective.
2.2 In-vehicle Subsystems
The organization of in-vehicle networks in subsys-
tems dedicated to the main functional domains came
as a natural development with the increasing demand
for complexity of electronics inside cars. Most com-
monly, in-vehicle network architectures include the
body, infotainment and telematics, power-train, chas-
sis and diagnostics as main subsystems. Other more
complex topologies consider additional domains such
as driver assistance and safety while, when not specif-
ically nominated, these functionalities are assimilated
by the other subsystems. Each of these subsystems is
responsible for a set of specific functionalities which
can be targeted by attacks. In what follows, we
present several common functionalities in relation to
the subsystems of which they are a part of and in-
cluded in our model:
1. Body related subsystems integrate all functional-
ities that are not related to the vehicle dynamics
but are required as basic vehicle functionalities,
e.g., wind-shield wipers, lighting, window lift, air
conditioning, door locks, immobilizer, etc. Often
several of these functionalities, if not all, are inte-
grated in a single module called the Body Control
Module (BCM). Successful attacks on the body
subsystem can have various consequences. They
might lead to the theft of the vehicle in case the
immobilizer and the locking systems are targeted
while attacks that affect the exterior lighting dur-
An Experimental Model for In-vehicle Networks and Subsystems
327

ing night driving can potentially lead to life threat-
ening situations.
2. Infotainment and telematics handles information
services and entertainment aspects intended for
enhancing user experience. Infotainment modules
can be found in virtually all modern vehicles as
all are equipped with instrument clusters and at
least a basic multimedia system. The telematic
domain provides functionalities that offer support
for communication between the vehicle and the
exterior world: GPS, radio, mobile telecommuni-
cation, etc. While tampering with infotainment or
telematic systems may appear to have no serious
consequences, recently reported attacks (Check-
oway et al., 2011) prove that these systems can
provide means to infiltrate the vehicle and gain
access to its internal bus providing opportunities
for attacks on other subsystems.
3. Power-train systems are responsible with the lon-
gitudinal propulsion of the vehicle and include
components such as the engine, transmission and
related subsystems like the fuel injection, emis-
sion control and gear shift. Given the critical na-
ture of the control systems involved in the power-
train domain, attacks aimed at this system can
result in serious traffic incidents. The real-time
nature of power-train related subsystems makes
them susceptible to DoS attacks by generating
high bus-loads that prevents timely processing.
4. Chasis is the subsystem which sums up compo-
nents that control the wheels and their movement.
Steering and braking are some of the basic func-
tionalities handled by the chassis subsystem, but it
is also responsible with more advanced functions
such as the anti-lock braking, electronic stability
control, etc. It is clear that performing malicious
actions on this category of systems can have se-
vere effects.
5. The diagnostics system was introduced as a ne-
cessity due to the complexity of modern vehi-
cles. This system, which has become mandatory
in newly produced vehicles in the US and the EU,
is responsible with self-diagnosis and reporting
functionalities. Therefore, all vehicles must pro-
vide a physical port for connecting an external di-
agnosis tool to monitor system variables and read-
out existing trouble codes. This port is know as
the OBD (On-Board Diagnosis). The vehicle di-
agnosis system is important from a security per-
spective as it was previously used as an entry-
point for many of the attacks reported so far.
2.3 Attack Instruments: CAN Sniffers
Whether one wants to mount attacks on in-vehicle
networks or build secure communication protocols,
a set of hardware and software tools is required for
tapping into the communication buses. Most of the
currently reported attacks use the CAN bus since it is
the most widely used in automotive networks.
A wide range of off-the-shelf PC to CAN interfac-
ing devices are available, at affordable prices, for gen-
eral purpose applications. Some products come with
accompanying applications that offer an out-of-the-
box support for CAN sniffing using a PC. Generic so-
lutions exist for those PC to CAN devices that do not
come with appropriate software for network protocol
analysis, such is the case of the well known Wireshark
which can be configured to analyse CAN packets by
using SocketCAN. SocketCAN(Smith, 2016) imple-
ments CAN drivers and networking stack for differ-
ent CAN transceivers and uses the CAN bus like a
generic network interface. Kayak
1
is a Java applica-
tion for CAN bus diagnosis and monitoring. It uses
Socketcand Daemon which allows the usage of Sock-
etCAN with programing languages that are not able
to access the the directly the low-level CAN sockets.
Tools for CAN attacks can be built with little ef-
fort using readily available components for embedded
hobbyists, e.g. an attack on a Mini Cooper instrument
cluster using an Arduino based setup is demonstrated
in (Staggs, 2013). EcomCAT software was devel-
oped and used by Valasek and Miller in (Miller and
Valasek, 2013). It is a CAN analysis tool for monitor-
ing the CAN network and for injecting messages by
using ECOM cables.
More complex solutions are available in the form
of professional-grade devices and software tools pro-
vided by suppliers of automotive industrial develop-
ment and testing solutions such as Vector and Na-
tional Instruments. However, the cost of such solu-
tions is much higher and may not prove to be reason-
able for some basic sniffing and replay attacks.
Vector CANoe
2
is a well known automotive soft-
ware used for development and testing of ECUs. It
can simulate but also interface with all the communi-
cations standards that are available today in the auto-
motive industry.
One important aspect is the definition of CAN net-
work proprieties, of the ECUs that are connected to
the bus and of the CAN frames, associated signals and
attributes. In the automotive industry the most used
format is implemented by Vector .dbc files which can
be created and updated by using the Vector CANdb++
1
https://github.com/dschanoeh/Kayak
2
https://vector.com/vi canoe en.html
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
328

software. This proprietary file format is not docu-
mented but an open source alternative exists ,CANBa-
bel
3
, which converts the .dbc files in a XML based
format .kdx. This file format can be used with the
Kayak software, the XML format facilitating the cre-
ation and the update of this file.
3 SECURITY SOLUTIONS:
CRYPTOGRAPHIC
PROTOCOLS
Existing security solutions or academic research
works that have not yet reached practical implemen-
tations can be discussed in connection with the buses
and components that are part of our model.
3.1 Security Solutions for In-vehicle
Buses
We point out several proposed security solutions
for the communication buses and interfaces that are
present in our experimental model:
1. The CAN bus is likely the most explored in-
vehicle bus in terms of security solutions. Ex-
isting research works span from the use of ba-
sic message authentication codes (Hartkopp et al.,
2012), TESLA like protocols (Groza and Murvay,
2013), group key sharing (Groza et al., 2012),
physical layer oriented key allocation, security
aware signal allocation in frames (Lin et al.,
2015), hardware components that discard forged
frames (Kurachi et al., 2014), etc.
2. FlexRay received little attention compared to the
CAN bus (the main reason is likely that FlexRay
capable ECUs are more expensive and harder to
use for academic research). Due to its time trig-
gered nature, TESLA like protocols appear to be
more appropriate and these have already been ex-
plored in (Han et al., 2014), (Gu et al., 2016).
3. LIN is the most limited bus in terms of bandwidth,
a reason for which it is unlikely for security solu-
tion to be ever devised for this bus. Due to its use
in controlling vehicle body components that are in
turn controlled by other ECUs from remote, e.g.,
over the CAN bus, it is less likely for this bus to
require any security mechanisms.
4. RF communication interfaces are employed for
vehicle keys and tire sensors. Existing security
3
https://github.com/julietkilo/CANBabel
protocols or cryptographic primitives that are pro-
prietary proved to be flawed on careful analysis.
For example RF vehicle keys based on Hitag2
(one of the most widely spread solutions) were
shown to be flawed in (Verdult et al., 2012).
There are many other reported attacks and solu-
tions which we omit here for brevity.
The following wireless interfaces were not specif-
ically designed for vehicles but as they become a con-
stant presence inside cars, they can be exploited as an
attack surface:
1. WiFi 802.11 comes with the existing WPA2 secu-
rity suite which provides a reasonable level of se-
curity. Still, since WPA2 security generally relies
on passwords, special care should be taken with
the authentication credentials.
2. Bluetooth used to provide no security layers at all,
but as of version 4.0 support for AES encryption
exists. Still a lot of user applications do not re-
quire passwords for BT connectivity or they rely
on PIN codes that are easy to break. This happens
to be the case for BT capable OBD diagnosis tools
which are cheap and quite popular today.
3. NFC cards support standard cryptographic func-
tions and can be used for enhancing the security
of access control including for in-vehicle immo-
bilizers (Busold et al., 2013).
3.2 Security Solutions for In-vehicle
Subsystems
We now discuss some security solutions along the fol-
lowing subsystems from our model:
1. Electronic immobilizers were designed to protect
the theft of the car (Lemke et al., 2006). While
simple challenge-response authentication proto-
cols can be used for this purpose, the current trend
is to replace mechanical keys with smart elec-
tronic devices, e.g., smart-phones. This opens
room for new security designs which are dis-
cussed by several research works (Busold et al.,
2013).
2. Infotainment units are currently equipped with
modern Operating Systems (OS). Android ap-
pears to be the best candidate OS for such units
and is already available in genuine infotainment
units or after-market units from third parties. As a
Linux derivate, Android comes with several im-
mediate security benefits such as the restricted
root access which limits the effects of compro-
mised applications on the system. But Android
is not bullet-proof and an Android unit may have
An Experimental Model for In-vehicle Networks and Subsystems
329

been rooted and compromised without driver’s
knowledge thus opening gate for attacks.
3. The security of the Tire Pressure Monitoring Sys-
tems (TPMS) has been addressed by at least two
security research works (Xu et al., 2013) and
(Solomon and Groza, 2015) since the first attacks
were mounted in (Ishtiaq Roufa et al., 2010). De-
vising security solutions for this system is partic-
ularly hard due to the low computational capabili-
ties on existing sensors (e.g., 8-bit processors) and
due to energy constraints (sensors rely on batter-
ies).
4. Vehicle instrument clusters have been a constant
target of attacks since they used to store the
mileage of the vehicle which is a key factor in the
reselling value of the asset. Currently, this value is
stored in several ECUs inside the car and compro-
mising the instrument cluster alone is ineffective
for most modern cars. Work on instrument cluster
security is mostly absent.
4 MODEL COMPONENTS
The experimental setup illustrated in Figure 1 gathers
the previously described networks and subsystems.
Technical details on the components that we add are
available in Table 1. We now discuss network topol-
ogy and components.
Due to the demand for low latencies, the En-
gine and Chasis ECUs are connected via a high-speed
FlexRay bus. Freescale/NXP MC9S12XF512 are tar-
get ECUs for such tasks. Further, both these ECUs
are connected to the BCM module over a high speed
CAN bus. The same bus can be used for external
diagnosis purposes. The BCM module can be im-
plemented on a lower-class MC9S12DG128 or the
same MC9S12XF512. The BCM module is respon-
sible for the following body-related functionalities:
rain and light sensors on the windshield, door and
window actuators that are connected via the LIN bus,
and the RF-key and TPMS receiver for which com-
munication is done over a serial port. For imple-
menting RF functionalities in TPMS sensors and key
we plan to use low-cost, RF-capable controllers such
as Texas Instruments MSP430F2274. The front and
rear lights are controlled over General-purpose in-
put/output (GPIO) ports. Further, the BCM is con-
nected on a low speed CAN to the instrument cluster
(dashboard) and to the Infotainment unit. For the in-
strument cluster we use an off-the-shelf cluster.
The infotainment unit as a potential third-party
(after-market) device is connected to the CAN bus but
a firewall prevents potential attacks. A low cost ECU
as the MC9S12DG128 can be used for this purpose.
A firewall is needed since the Infotainment units re-
quire CAN bus connectivity (e.g., for controlling the
unit via steering-wheel buttons) but is clear that such
a unit once plugged to the CAN bus can take control
and inject messages at will. The firewall prevents this
from happening. It is an open question if the OBD di-
agnosis should be placed behind the same firewall or
technicians are trustworthy individuals. For the Info-
tainment unit we plan to use off-the-shelf units from
third party vendors, e.g., Erisin ES2508B is one such
example.
Three actors are also present on the model: one
technician and two users. Their presence only sug-
gests some use-cases for which security should be
considered: technicians that have access over the
OBD port, regular user access to the car and connec-
tivity to the infotainment unit.
Table 1: Characteristics of the experimental model devices.
Prod. Unit characteristics Connectivity
NXP
Target ECU: Firewall/IDS
MC9S12DG128, 16bit, 50MHz
Flash: 128KB, EEPROM: 2 KB
SRAM: 8KB
LIN: 1 ch.
CAN: 2 ch.
IIC, 2xSCI, 2xSPI
SAE J1850
NXP
Target ECU: Chasis, Engine
MC9S12XF512, 16bit, 50MHz
Flash: 512KB, EEPROM: 2 KB
SRAM: 32KB
FlexRay: 2 ch.
CAN: 1 ch.
IIC, 2xSCI, 2xSPI
TI
Target ECU: RF-Key receiver
MSP430F2274, 16bit, 16MHz
Flash: 32KB, RAM: 1KB
GPIO: 32
IIC, UART, SPI
Erisin
Infotainment Unit: Erisin ES2508B
Rockchip PK3188
Quad-Core Cortex A9, 1.6GHz
1GB RAM, 0.98GB ROM
Android 4.4.4
WiFi 802.11b/g/n
Bluetooth
CAN, USB, GPS
5 CONCLUSION
Cars are complex ecosystems, an experimental model
that covers about a dozen in-vehicle subsystems and
buses does not offer a complete view but gives useful
hints in assessing the vehicle as a system. Our model
groups the most significant in-vehicle buses: CAN,
LIN and FlexRay and also some wireless interfaces:
BlueTooth, WiFi and RF. It also addresses some rele-
vant subsystems: the instrument cluster, infotainment
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
330

units, tire sensors as well as several controllers for
BCM, engine and chasis functionalities. The chal-
lenge in designing security solutions stems from the
fact that security must be transparent to the user, ide-
ally requiring no interaction with the user and small
(almost inexistent) delays or bus-loads. Any security
mechanisms that requires more interaction comes at
the cost of usability while performance overhead may
compromise overall system performance. This exper-
imental model may provide a more realistic setup for
validating solutions in this regard.
ACKNOWLEDGEMENTS
This work was supported by a grant of the Romanian
National Authority for Scientific Research and Inno-
vation, CNCS-UEFISCDI, project number PN-II-RU-
TE-2014-4-1501 (2015-2017).
REFERENCES
Busold, C., Taha, A., Wachsmann, C., Dmitrienko, A.,
Seudi
´
e, H., Sobhani, M., and Sadeghi, A.-R. (2013).
Smart keys for cyber-cars: Secure smartphone-based
NFC-enabled car immobilizer. In Conference on Data
and Application Security and Privacy, pages 233–242.
ACM.
Checkoway, S., McCoy, D., Kantor, B., Anderson, D.,
Shacham, H., Savage, S., Koscher, K., Czeskis, A.,
Roesner, F., Kohno, T., et al. (2011). Comprehensive
experimental analyses of automotive attack surfaces.
In USENIX Security Symposium.
Groza, B., Murvay, P.-S., Van Herrewege, A., and Ver-
bauwhede, I. (2012). LiBrA-CAN: a lightweight
broadcast authentication protocol for controller area
networks. In 11th International Conference on Cryp-
tology and Network Security, CANS 2012, Springer-
Verlag, LNCS.
Groza, B. and Murvay, S. (2013). Efficient protocols for
secure broadcast in controller area networks. IEEE
Transactions on Industrial Informatics, 9(4):2034–
2042.
Gu, Z., Han, G., Zeng, H., and Zhao, Q. (2016). Security-
aware mapping and scheduling with hardware co-
processors for flexray-based distributed embedded
systems. IEEE Transactions on Parallel and Dis-
tributed Systems, 27(10):3044–3057.
Han, G., Zeng, H., Li, Y., and Dou, W. (2014). Safe:
Security-aware flexray scheduling engine. In Design,
Automation and Test in Europe Conference and Exhi-
bition (DATE), pages 1–4. IEEE.
Hartkopp, O., Reuber, C., and Schilling, R. (2012).
MaCAN-message authenticated CAN. In 10th Int.
Conf. on Embedded Security in Cars (ESCAR 2012).
Ishtiaq Roufa, R. M., Mustafaa, H., Travis Taylora, S. O.,
Xua, W., Gruteserb, M., Trappeb, W., and Seskarb,
I. (2010). Security and privacy vulnerabilities of in-
car wireless networks: A tire pressure monitoring sys-
tem case study. In 19th USENIX Security Symposium,
pages 11–13.
Koscher, K., Czeskis, A., Roesner, F., Patel, S., Kohno,
T., Checkoway, S., McCoy, D., Kantor, B., Anderson,
D., Shacham, H., et al. (2010). Experimental security
analysis of a modern automobile. In Security and Pri-
vacy (SP), 2010 IEEE Symposium on, pages 447–462.
IEEE.
Kurachi, R., Matsubara, Y., Takada, H., Adachi, N.,
Miyashita, Y., and Horihata, S. (2014). CaCAN - cen-
tralized authentication system in CAN (controller area
network). In 14th Int. Conf. on Embedded Security in
Cars (ESCAR 2014).
Lemke, K., Sadeghi, A.-R., and St
¨
uble, C. (2006). Anti-
theft protection: Electronic immobilizers. In Embed-
ded Security in Cars, pages 51–67. Springer.
Lin, C.-W., Zhu, Q., and Sangiovanni-Vincentelli, A.
(2015). Security-aware modeling and efficient map-
ping for CAN-based real-time distributed automotive
systems. IEEE Embedded Systems Letters, 7(1):11–
14.
Miller, C. and Valasek, C. (2013). Adventures in automotive
networks and control units. DEF CON, 21:260–264.
Smith, C. (2016). The Car Hacker’s Handbook. No Starch
Press.
Solomon, C. and Groza, B. (2015). LiMon - lightweight
authentication for tire pressure monitoring sensors. In
1st Workshop on the Security of Cyber-Physical Sys-
tems.
Staggs, J. (2013). How to hack your mini cooper: reverse
engineering can messages on passenger automobiles.
Institute for Information Security.
Verdult, R., Garcia, F. D., and Balasch, J. (2012). Gone in
360 seconds: Hijacking with hitag2. In Proceedings of
the 21st USENIX conference on Security symposium,
pages 37–37. USENIX Association.
Xu, M., Xu, W., Walker, J., and Moore, B. (2013).
Lightweight secure communication protocols for in-
vehicle sensor networks. In Workshop on Security,
privacy & dependability for cyber vehicles, pages 19–
30. ACM.
An Experimental Model for In-vehicle Networks and Subsystems
331
