
Development of Experiential Learning System based on the
Connection between Object Models and Their Digital Contents
Collaboration between Tangible Interface and Computer Interaction
Yosuke Ota
1
, Mina Komiyama
2
, Ryohei Egusa
3,4
, Shigenori Inagaki
4
, Fusako Kusunoki
2
,
Masanori Sugimoto
5
and Hiroshi Mizoguchi
1
1
Department of Mechanical Engineering, Tokyo University of Science, 2641 Yamazaki, Noda-shi, Chiba-ken, Japan
2
Department of Computing, Tama Art University, Tokyo, Japan
3
JSPS Research Fellow, Tokyo, Japan
4
Graduate School of Human Development and Environment, Kobe University, Hyogo, Japan
5
Division of Computer Science and Information Technology, Hokkaido University, Hokkaido, Japan
Keywords: Education, Object, Arduino, Kinect.
Abstract: Experiential learning is effective for educating children. However, there are many issues associated with this
technique. In this study, we describe the development of a learning support system using which learners can
experience touching and viewing in real and virtual environments. In the first stage of our study, we develop
a larval mimesis experience system consisting of a Kinect sensor, larval models, and load sensors. The system
is controlled using Arduino. Using the proposed system, learners can exercise full body interaction in the
virtual environment; specifically, they can experience how larva models are observed in the real environment.
The operation of this system was experimentally evaluated by learners from a primary school. The results
indicate that the system is suitable for the use of children. In addition, the effectiveness of the learning support
was evaluated by using a questionnaire. This paper summarizes the development of the proposed system and
describes the evaluation results.
1 INTRODUCTION
The importance of natural experiential learning in
educating children is well known. In this technique,
emphasis is on teaching and learning by direct
experience (Bueno, 2015). However, some things are
difficult to experience directly, such as the habits of
extinct animals and plants, time-consuming
vegetation transition, and the habits of creatures with
remote habitation environments.
Previous studies have conducted trials on
simulating experience by reproducing the natural
environment in a virtual environment. Yoshida et al.
studied a learning experience related to extinct
animals using full body interaction (Yoshida, 2015)
(Adachi, 2013). Learning to move the body, as in a
full body interaction, has a strong effect on learning
(Yap, 2015). However, this experience is limited in
the virtual environment. Learners do not experience
real sensations, such as touching. This issue must be
addressed to improve the quality of experiential
learning.
In this study, we describe the development of a
learning support system "OBSERVE," which allows
learners to experience real and virtual environments.
We use a tangible user interface that can handle
information intuitively by using a combination of
physical objects and digital information to simulate
experiences in the real environment (Ishii, 1997).
This combines the experience of using virtual and real
environments (Ishii, 2008) and enables learners to
learn based on experiences in both. We expect that
this system will improve the learning experience.
In the first stage of this study, we develop a larval
mimesis experience system that can be experienced in
real and virtual environments. The proposed system
consists of a commercial sensor, larval models,
projector, screen, PC, and board-type computer.
Using this system, learners observe larval models,
perform interactions to identify larvae, and find latent
larvae. We expect learners to observe the larval
models and virtual environment attentively, as the
154
Ota, Y., Komiyama, M., Egusa, R., Inagaki, S., Kusunoki, F., Sugimoto, M. and Mizoguchi, H.
Development of Experiential Learning System based on the Connection between Object Models and Their Digital Contents - Collaboration between Tangible Interface and Computer
Interaction.
DOI: 10.5220/0006356901540159
In Proceedings of the 9th International Conference on Computer Supported Education (CSEDU 2017) - Volume 2, pages 154-159
ISBN: 978-989-758-240-0
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
larval models are palm-sized. In this paper, we
describe the proposed system, its experimental
evaluation, and the results based on information
gathered using a questionnaire.
2 OBSERVE SYSTEM
2.1 Proposed System
In this study, we develop a system to realize
experiential learning support. The flow of the system
first requires learners to choose a larval model. We
prepared models for 15 kinds of larvae—Biston
robustus, Vespina Nielseni, Hypopyra vespertilio,
Deilephila elpenor, Apochima juglansiaria Graeser,
Celastrina argiolus, Cucullia maculosa Staudinger,
Auaxa sulphurea, Neptis philyra, Thetidia
albocostaria, Geometra dieckmanni, Xenochroa
internifusca, Langia zenzeroides nawai, Neptis
aiwina, and Sphinx caliginea caliginea. When a
particular model is selected, its corresponding image
is displayed on the screen. The larva is hidden in the
display and learners play a game to find it. After
finding the larva, the learners move their body and
perform a motion to catch the larva. Then, the larva
begins to move and an explanation of the mimicking
action is shown.
Using this system, learners not only experience
the observation of the larval model directly, but also
observe them in the virtual environment. Realizing
this requires us to implement the following two
functions: (a) creation of a larval model as a tangible
interface, and (b) operation using the learner’s body
motion. Function (a) combines the larval models and
larva in the virtual environment, while function (b)
allows us to implement experiential learning in the
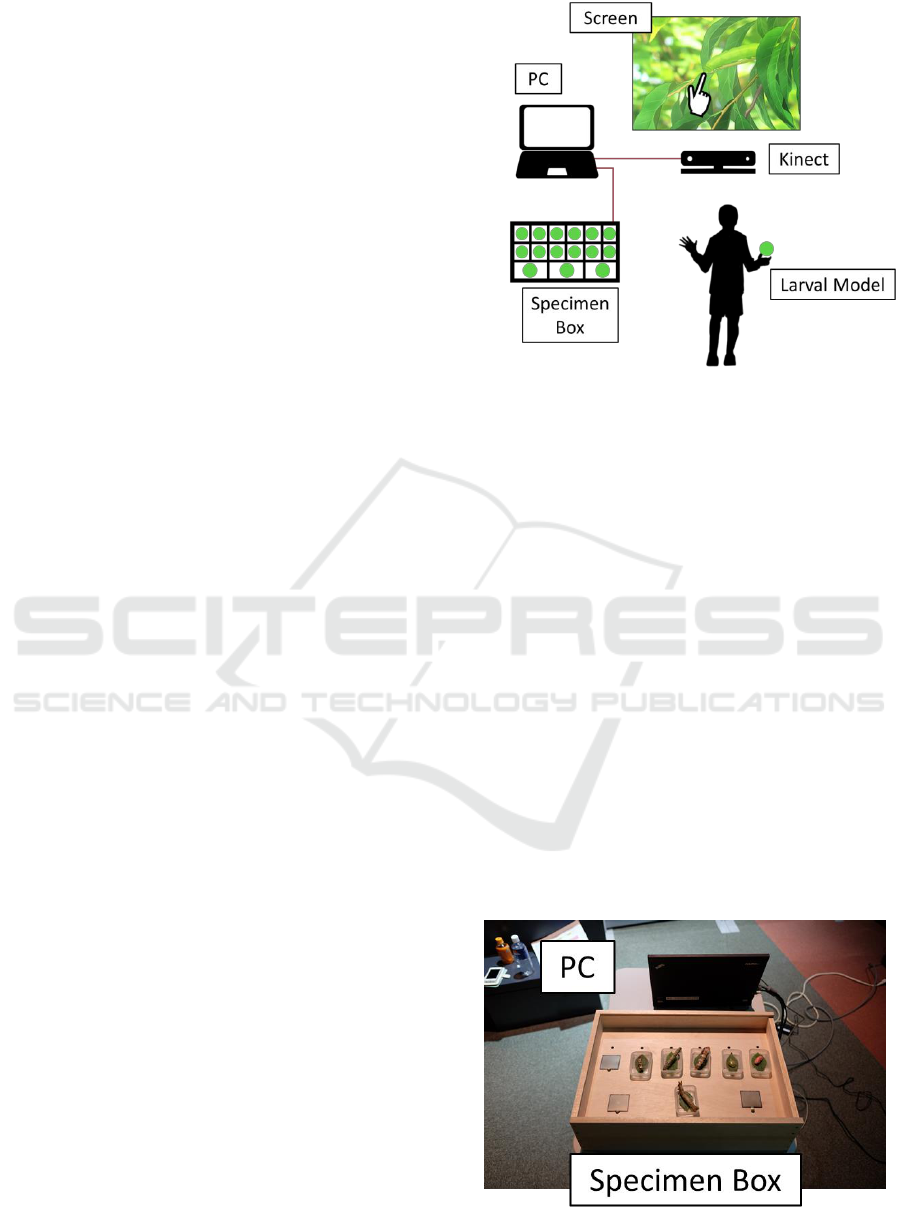
virtual environment. Figure 1 shows the setup of the
system.
2.2 Creating a Larval Model as a
Tangible Interface
Displaying the chosen larva model in the virtual
environment necessitates the development of a
recognition function for the model. We use a board-
type computer, Arduino, and load sensor, FSR(Force
Resister Sensor), to recognize the model. Arduino is
a single board-type computer using which various
sensors can be controlled (Balogh, 2010). We use
Arduino with control FSR, a sheet-like load sensor.
The resistance level of FSR varies with the size of the
added load.
Figure 1: Setup of the system. Function (a) is performed in
the specimen box. This consists of Arduino and FSR sensor.
Function (b) is performed by the Kinect sensor.
We use FSR for two reasons. First, the value of
the load is output in analog form. The system contains
multiple larval models of varying weights, and hence
the system must be adaptable to react to all of them.
Second, FSR is not affected by illumination and
temperature. In order to evaluate the proposed system,
we carried out experiments in the laboratory as well
as in a museum. Since the brightness of the
illumination in the museum differs from that in the
laboratory, the use of a sensor that remains unaffected
by this characteristic is desirable.
We incorporate Arduino and FSR in a larval
specimen box. Figure 2 shows the specimen box and
PC. Figure 3 shows a larval model. The larval models
are mounted on the FSR. When a learner picks up the
model, it gets separated from the FSR, inducing a
change in the resistance level. The system reads this
change using Arduino, and recognizes that a learner
has picked up the model.
Figure 2: Specimen box and PC.
Development of Experiential Learning System based on the Connection between Object Models and Their Digital Contents - Collaboration
between Tangible Interface and Computer Interaction
155
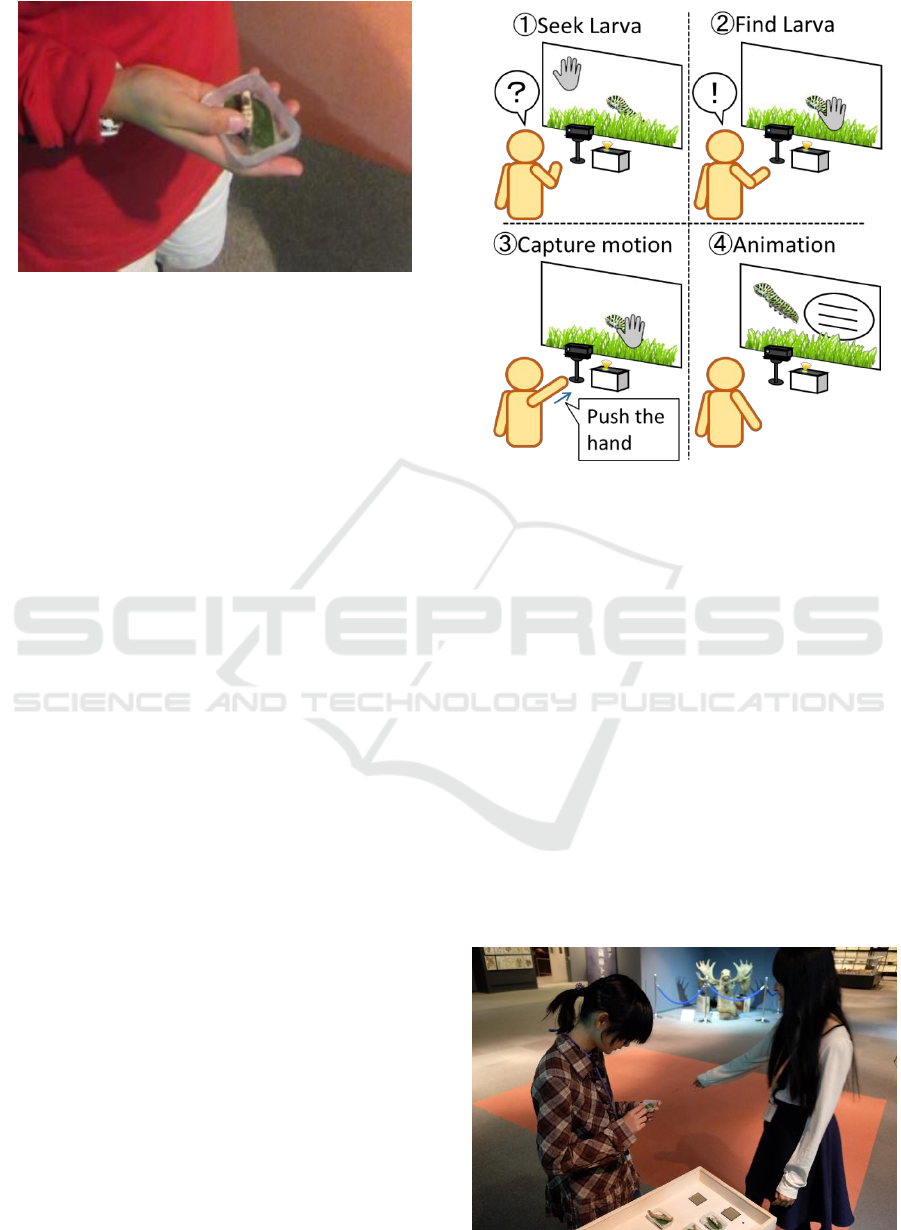
Figure 3: Larval model.
2.3 Operation using Learner’S Body
Motion
The system requires real-time knowledge of the
learner’s movements to reflect this on the screen. This
enables learners to experience the virtual
environment by moving their bodies. We use a Kinect
sensor to recognize the movement of the learner. This
sensor is a range image sensor, originally developed
as a home videogame device. It is highly cost
effective and can measure distance with errors in the
range of a few centimeters. Thus, the sensor can
estimate user location precisely. Additionally, this
sensor can recognize humans and their skeletons
using libraries, such as Kinect for Windows SDK.
This allows the Kinect sensor to estimate movements
associated with human body parts, such as the limbs
(Schotton, 2013).
The system enables learners to operate in a virtual
environment by using hand movements. When a
learner moves his hand, the hand pointer displayed in
the virtual environment exhibits a similar movement.
Figure 4 shows the flowchart of the procedure
followed for seeking larva. Learners look for a larva
and carry a pointer to a larva if they find it. A pointer
in the virtual environment of the hand touches the
larva when a movement is performed by pushing the
hand forward. The animation of the larva moving on
the screen is played when the system recognizes the
movement of the learner’s touch.
3 EXPERIMENT
3.1 Methods
The proposed system was evaluated by 13 fifth-grade
students (four boys and nine girls) from a national
university-affiliated elementary school. The
Figure 4: Flowchart of seeking larva.
evaluation was conducted at the H Prefecture natural
history museum. The participants tried out the system
one-by-one. Six types of larvae were prepared as
objects: Biston robustus, Vespina Nielseni, Hypopyra
vespertilio, Deilephila elpenor, Apochima
juglansiaria Graeser, and Celastrina argiolus. The
participants used all the objects and experienced the
system as described next.
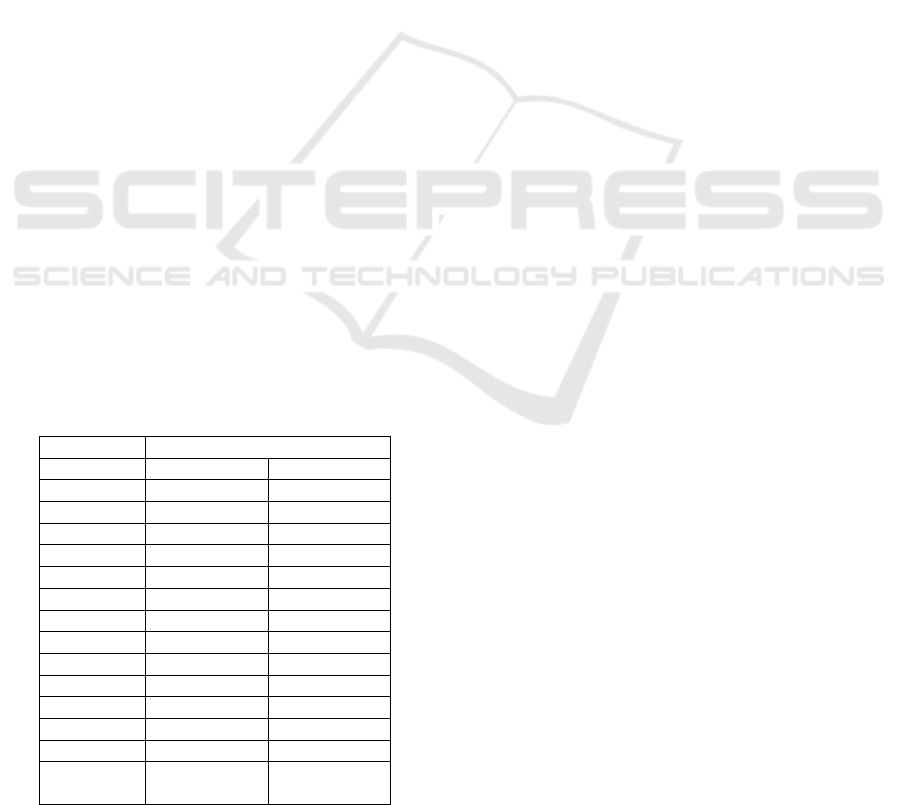
The participants began by selecting and observing
larvae from the six types of objects in the order of
their interest. Figure 5 shows the scene. When an
object is selected, animation that imitates the larvae
of the selected object appears on a screen. Participants
looked at the larvae and touched them with their
hands. Figure 6 shows the participants seeking larvae.
Once they found the larvae, the participants referred
to information on the object that appeared on the
screen, as shown in Figure 7.
Figure 5: Selecting and observing larval model.
CSEDU 2017 - 9th International Conference on Computer Supported Education
156

Figure 6: Seeking larvae.
Each of the participants repeated this process for
all six objects. For a chosen model, we recorded two
types of data—whether the larva emerging on screen
is right, and whether the animation shown after
discovery is played correctly. We evaluated the
system operation based on these parameters. After
trying the system, the participants viewed related
exhibits in the museum in groups of two and three.
Finally, we evaluated the system using a survey.
Figure 8 shows the participants taking the survey. The
survey comprised of 13 questions: three related to the
overall experience of the system, four of them
regarding the effect of the objects, three questions on
the experience of physical movement, and three
regarding the information provided by the animation.
Each question was scored on a scale of one to seven,
with one corresponding to “strongly agree” and seven
corresponding to “completely disagree.”
Figure 7: Referring to information.
Figure 8: Completing the survey.
3.2 Results
First, we analyze the operational evaluation. Table 1
shows the experimental results corresponding to the
operational evaluation. We recorded the number of
successes in recognizing the six kinds of larva for all
the subjects. “A” represents the result of larval model
recognition. The success rate for the total number of
trials was 98.7%. For cases in which recognition
failed, we observed that the model slipped from the
load sensor. Thus, we assume that recognition failed
because the sensor did not compute the load correctly.
“B” represents the number of times the animation
plays successfully when the learner touches the larva
in a virtual environment. The success rate was
96.15%. We observed that for cases in which the
animation failed, the leaners pushed their hand while
moving their arm violently. This caused Kinect to
recognize their movement incorrectly. From these
results, we confirm that the system can be operated
correctly by children in most situations.
Next, we describe the analysis of survey
responses. We classified responses such as “strongly
agree,” “agree,” and “somewhat agree” as positive
responses, and “no opinion,” “do not strongly agree,”
“do not agree,” and “completely disagree” as neutral
or negative responses. We then analyzed the number
of positive replies and neutral and negative replies
using a directly established calculation: 1 x 2
population rate inequality.
Three questions were about the overall system
experience. The number of positive responses for “I
developed an interest in larvae imitation,” “I
experienced the system and have a good
understanding of the museum exhibits related to
larvae imitation,” and “The system experience was
fun,” exceeded the number and neutral or negative
replies. Additionally, a significant deviation was
observed between the various responses.
Development of Experiential Learning System based on the Connection between Object Models and Their Digital Contents - Collaboration
between Tangible Interface and Computer Interaction
157
Four of the questions were related to the objects.
The number of positive replies for “I was able to
observe the larvae figures (objects) very well,” “I
observed the larvae figures (objects) from several
angles and understood some things about their
ecology,” “I understood some things about the
ecology of larvae by looking at the larvae figures
(objects),” and “The larvae figures (objects) looked
real; like they were actually alive” exceeded the
number of neutral and negative responses.
Additionally, a significant deviation was observed
between the various responses.
Three questions dealt with the physical movement
experience. The number of positive responses for “I
developed an interest in larvae imitation through the
game where I moved my body to look for the larvae,”
“I would like to learn more about larvae imitation
through the game where I moved my body to look for
the larvae,” and “I developed an interest in other
museum exhibits on imitation through the game
where I moved my body to look for the larvae”
exceeded the number of neutral and negative
responses. Additionally, a significant deviation was
observed between the various responses.
Finally, three questions were related to the
information provided by the animation. The number
of positive responses for “I developed an interest in
larvae imitation by looking at the displayed
animation,” “I would like to learn more about larvae
imitation by looking at the displayed animation,” and
“I developed an interest in museum exhibits on
imitation by looking at the displayed animation”
exceeded the number of neutral and negative
responses. Additionally, a significant deviation was
observed between the various responses.
Table 1: Experimental result of operational evaluation.
The number of success
Subject
A
B
1
6
6
2
6
6
3
6
6
4
6
6
5
6
6
6
6
6
7
5
6
8
6
6
9
6
4
10
6
5
11
6
6
12
6
6
13
6
6
Success
rate[%]
98.72
96.15
4 CONCLUSION AND FUTURE
WORK
In this paper, we discussed the development and
evaluation of an experiential learning support system.
Operational evaluation showed that the system could
be operated correctly by children in almost all cases.
The effectiveness of the system was evaluated using
a survey that consisted of 13 questions. Out of these,
three items were on systems, four on objects, three on
the physical movement experience, and three on the
information provided by the animation. For all of
these, the number of positive responses exceeded
neutral and negative responses. There was also a
significant difference between the various responses.
These results suggest that experiencing systems,
using physical objects and physical movement,
elicited the interest and attention of the participants
toward the larvae and led to effective learning
through museum exhibits.
Furthermore, we realized that system information
provided through animation motivated the
participants and supported viewing of the object
larvae along with other related museum exhibits. In
future work, we plan to increase the types of larvae.
We will also consider a learning program that is not
limited to the object larvae, but includes observation
of live larvae outside the museum.
ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI Grant
Numbers JP26560129 , JP15H02936. The
evaluation experiment was supported by The
Museum of Nature and Human Activities, Hyogo. We
would like to thank Editage (www.editage.jp) for
English language editing.
REFERENCES
Bueno, J., & Marandino, M., 2015. The notion of
praxeology as a tool to analyze educational process in
science museums. In Proceedings of the 11th
Conference of the European Science Education
Research Association (ESERA '15), Stand 9:
Environmental, health and outdoor science education,
pages 1382-1388.
Yoshida, R., Egusa, R., Saito, M., Namatame, M.,
Sugimoto, M., Kusunoki, F., Yamaguchi, E., Inagaki,
S., Takeda, Y., & Mizoguchi, H., 2015. BESIDE: Body
Experience and Sense of Immersion in Digital
Paleontological Environment. In Proceedings of the
CSEDU 2017 - 9th International Conference on Computer Supported Education
158

33rd Annual ACM Conference Extended Abstracts on
Human Factors in Computing Systems (CHI EA '15),
pages 1283-1288.
Adachi, T., Goseki, M., Muratsu, K., Mizoguchi, H.,
Namatame, M., Sugimoto, M., Kusunoki, F.,
Yamaguchi, E., Inagaki, S., & Takeda, Y., 2013.
Human SUGOROKU: full-body interaction system for
students to learn vegetation succession. In Proceedings
of the 12th International Conference on Interaction
Design and Children (IDC '13), pages 364-367.
Yap, K., Zheng, C., Tay, A., Yen, C., & Yi-Luen, D., E.,
2015. Word out!: learning the alphabet through full
body interactions. In Proceedings of the 6th Augmented
Human International Conference (AH '15), pages 101-
108.
Ishii, H., & Ullmer, B., 1997. Tangible bits: towards
seamless interfaces between people, bits and atoms. In
Proceedings of the ACM SIGCHI Conference on
Human factors in computing systems (CHI '97), pages
234-241.
Ishii, H., 2008. The tangible user interface and its evolution.
Commun. ACM 51, pages 32-36.
Balogh, R., 2010. Educational robotic platform based on
arduino. In Proceedings of the 1st international
conference on Robotics in Education (RiE '10), pages
119-122.
Shotton, J., Sharp, T., Kipman, A., Fitzgibbon, A.,
Finocchio, M., Blake, A., & Moore, R. 2013. Real-time
human pose recognition in parts from single depth
images. Communications of the ACM, 56(1), pages
116-124.
Development of Experiential Learning System based on the Connection between Object Models and Their Digital Contents - Collaboration
between Tangible Interface and Computer Interaction
159
