
Integration of Private and Carsharing Vehicles
into Intermodal Travel Information Systems
Christian Samsel
1,3
, Markus Christian Beutel
1,3
,
David Thulke
1
, Detlef Kuck
2
and Karl-Heinz Krempels
1,3
1
Information Systems, RWTH Aachen University, Aachen, Germany
2
Ford Research and Innovation Center, Aachen, Germany
3
Fraunhofer FIT, St. Augustin, Germany
Keywords:
Carsharing, Intelligent Transportation Systems, Intermodal Travel Information, Web Information Systems.
Abstract:
In the last years, intermodal mobility platforms offering combinations of various modal types, like trains,
buses, carsharing and ride sharing, have emerged. These platforms often also offer a smartphone-based door-
to-door navigation and a sophisticated travel assistance. Unfortunately, these smartphone-based services can-
not be used by the travelers as soon as they are driving a car themselves, e.g., a carsharing vehicle or their
private car, due to road safety regulations. The driver is essentially disconnected from the service. In addition,
modern cars have a lot of configuration options a driver might want to set up. This discourages using shared
vehicles in an intermodal itinerary. In this work we identify use cases of how an integration of carsharing vehi-
cles into intermodal travel information systems can enhance travel experience, introduce a system architecture
to allow the necessary information exchange and present a preliminary prototype to demonstrate its technical
feasibility.
1 INTRODUCTION
In the last years, the demand for intermodal mobility
has been increasing and especially in younger genera-
tions, car ownership becomes less popular (Klein and
Smart, 2017). Reasons for this include high main-
tenance cost, the declining value of cars as a status
symbol and environmental concerns (Kalmbach et al.,
2011). In urban areas, other modes of transporta-
tion offer higher availability and flexibility by avoid-
ing parking problems and congestions. In many sit-
uations, traditional public transport provides an ade-
quate replacement. But areas with insufficient cov-
erage of traditional public transport services or spe-
cial demands (e.g., high reliability) are requiring addi-
tional mobility services. One service to complement
traditional public transport is carsharing. Carsharing
became more and more popular in recent years (Sha-
heen and Cohen, 2007).
To make these complementary services appealing,
a seamless integration of various transportation sys-
tems is needed. One approach for such an integration
are advanced Travel Information Systems (TIS) offer-
ing intermodal itineraries (Beutel et al., 2016a). Inter-
modal itineraries consist of a mix of different modes
of transportation, e.g., using both trains and a carshar-
ing vehicle in the same journey. This requires com-
plex planning, which is enabled by integrating hetero-
geneous information from multiple mobility service
providers. This information can include for example
timetable information, vehicle availability or delays.
Besides traditional public transport providers like bus
or railway companies, integrated mobility services
can include, among others, car, bike and ridesharing
providers, parking services, taxi services or innova-
tive services like Uber
1
. In addition to the offering
of an intermodal itinerary, some of these systems also
provide integrated booking and billing services for all
legs of the itinerary. In this way, the user does not
have to book them individually. Examples for these
systems are Qixxit
2
by Deutsche Bahn (German rail-
ways), Moovel
3
by Daimler AG or “Mobility Broker”
as suggested in (Beutel et al., 2014).
The rising number of features in modern cars al-
lows an increasing amount of possibilities for cus-
tomization and personalization. Besides standard fea-
1
https://www.uber.com
2
https://www.qixxit.de/en
3
https://www.moovel.com/de/en
312
Samsel, C., Beutel, M., Thulke, D., Kuck, D. and Krempels, K-H.
Integration of Private and Carsharing Vehicles into Intermodal Travel Information Systems.
DOI: 10.5220/0006347803120319
In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2017), pages 312-319
ISBN: 978-989-758-242-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tures like seat and mirror positions, air conditioning
and radio, cars can integrate the drivers’ smartphones,
offer connected infotainment systems or even driving
assistants. Furthermore, many parts of current vehi-
cles become electronically controllable and intercon-
nected. In this way, the infotainment system is en-
abled to control settings like the seat or mirror posi-
tion.
Motivation
Currently, TIS’s are not integrated into cars booked
via carsharing providers. When users arrive at their
booked carsharing vehicles, these vehicles do not
know anything about the users nor about their route.
Unlike in transport modalities like trains, it is difficult
for users to interact with their smartphone or to use it
for navigation, as it is a security hazard and often for-
bidden by law. Necessary equipment like hands free
systems are often not available in carsharing vehicles.
Thus, the travel assistance provided by the TIS is dis-
rupted and the user has to manually enter the destina-
tion address into the car navigation systems, which is
a major inconvenience.
Furthermore, every time a traveler uses the ser-
vice, he or she has to manually customize most of the
car settings to his or her personal preferences. If a car
is unknown to them, they have the additional hassle of
finding out how to apply these settings to the car. Oth-
erwise they have no access to useful features. Accord-
ing to (Berylls Strategy Advisors, 2015), the second
most common reason (28%) for people not to use car-
sharing is that they do not want to drive an unfamiliar
vehicle. If carsharing vehicles could be already con-
figured for these users, this may mitigate the problem.
Additionally, misconfigured vehicles can become a
security risk. For example, it is crucial that the mir-
rors of the car are correctly adjusted, to remove blind
spots.
2 RELATED WORK
This section gives an overview over related work, in-
cluding actual systems and technologies which are
currently in use, as well as related academic research.
As mentioned in the introduction, Qixxit is an ex-
ample for a TIS by Deutsche Bahn. Beside train ser-
vices, it includes local public transport services, mul-
tiple carsharing providers, rental cars, ride sharing,
taxis, bike sharing and even airlines. Qixxit offers its
services via a webportal and a mobile application.
INRIX Intermodal Navigation
4
is a in-car ser-
4
http://inrix.com
vice to integrate local public transport connections
into journey planning. It is able to suggest users to
switch to alternative modes of transportation if these
are faster than the expected vehicle travel time. If
users choose to use a different mode of transporta-
tion, the vehicle navigates them for example to the
next train station. In contrast to the system proposed
in this work the system is bound to the navigation sys-
tem in the vehicle and is not accessible for example
via the user’s smartphone.
The problem of driver preferences in shared vehi-
cles already has been recognized by others. Among
other car manufactures, Ford has been approach-
ing the problem by offering the so called “MyKey”.
Drivers can store several settings of the car, like the
seat position, on their keys. If the car is opened us-
ing the key, the settings which are stored on it are
initiated. This solution works for a limited number
of drivers (e.g., for families) but requires that every
driver has a personal key and does not allow settings
to be shared between multiple cars.
In (Beutel et al., 2014), the authors introduce an
architecture for a TIS called Mobility Broker. It is
designed to allow heterogeneous mobility providers
to collaborate on a joint platform. Besides inter-
modal routing, it allows querying pricing information
and manages the booking and payment of intermodal
routes for users. Additionally, the advantages for par-
ticipating stakeholders are discussed. In (Beutel et al.,
2016a) the architecture is refined by discussing the
information flow between the TIS and the different
transportation providers in more detail.
A protocol used to communicate with sharing
providers, including car and bike sharing, is the Inter-
face for X-Sharing Information (IXSI) protocol, pro-
posed in (Kluth et al., 2015). It is designed to cre-
ate a unified interface between sharing providers and
TIS’s. It defines different services to enable function-
ality like availability queries, exchange of pricing in-
formation and booking of vehicles.
A solution more adequate to carsharing regarding
the problem of driver preferences in shared vehicles
is proposed in (K
¨
ummerling et al., 2013). The idea
is to create a centralized platform where every driver
can store his or her own Mobility Profile containing
his preferred vehicle settings. The user applies the
profile to the car by connecting his or her phone over
a Near Field Communication (NFC) interface. The
authors applied the concept to a prototype of a car
(consisting of a middle console and an electrically ad-
justable seat) and developed a mobile app. An advan-
tage compared to other solutions is that the profile can
be used for an arbitrary amount of vehicles. It addi-
tionally suggests four categories of data which may
Integration of Private and Carsharing Vehicles into Intermodal Travel Information Systems
313

be stored in such a Mobility Profile. These consist of
information about the driver, car dependent (e.g., seat
position) and independent (e.g., radio station) settings
and logging data (e.g., consumed fuel or driven kilo-
meters). The disadvantage of their solution is that the
driver still has to manually apply the settings to the
car with his or her phone.
3 USE CASES
To guide the design, we start with possible use cases.
Each use case discusses a real world example com-
prising problems mentioned in Section 1. Moreover,
these are used to provide an evaluation for the imple-
mentation.
Scenario 1: Synchronized Preferences. Every fri-
day, Bob uses a carsharing vehicle to drive from
Aachen to D
¨
usseldorf (and back). Previously, he ad-
justed the seat positions and searched for his favorite
radio station every time. It annoys him that he has to
adjust the vehicle every week. With the integration of
the carsharing vehicle and the TIS, the TIS can now
automatically apply the preferences to the vehicle be-
fore Bob arrives at the car. Thus, he can immediately
start driving without the need to apply any configura-
tions, giving a similiar experience as a private car.
As the preferences are transfered to the TIS, which
offers multiple carsharing services, his favorite radio
station is even preset when he uses a different model
and carsharing operator at the weekend.
Scenario 2: Preconfiguring the Navigation System.
Alice plans a trip from her home in Cologne to a lake
in the Eifel. The TIS recommends her to take the train
to Aachen and to rent a carsharing vehicle to get to
the lake from there. Without an integration of the TIS
with the infotainment system of her carsharing vehi-
cle, she had to manually enter the address of the lake
into the navigation system of the vehicle. Because of
the unknown interface, this was time consuming and
frustrating for her. With the integration of the TIS and
carsharing system respectively vehicle, the TIS can
now preconfigure the navigation system of the vehi-
cle. At the time Alice arrives at the vehicle, the ad-
dress of the lake in the Eifel is set as destination and
she can start driving immediately.
Scenario 3: Changing the destination while driv-
ing (using car sharing). Bob has to travel from
Aachen to a meeting in Cologne. He booked a car
sharing vehicle using his preferred TIS. An unex-
pected road accident on the highway causes a delay of
over an hour. Due to this, he would be late to his meet-
ing. Fortunately, his TIS is now integrated with the
carsharing vehicle. Using the Infotainment System,
he is notified about the possibility to stop the car and
change to a train in D
¨
uren. Bob can then accept this
itinerary change and thus still arrive at his meeting in
time. The train booking is done automatically and the
required ticket is transferred to his smartphone.
Current Coverage of Use Cases
The key-based preference systems are not applica-
ble to carsharing but only to situations where a small
number of persons share a vehicle. The concept of
Mobility Profiles in (K
¨
ummerling et al., 2013) re-
quires the interaction of the user to manually apply
his preferences to the vehicle. As a result, the process
is not as seamless as described in Scenario 1.
The integration of intermodal travel information
of INRIX in vehicles enables the navigation system
to suggest the driver to change to other modes of
transportation. In Scenario 3, it could suggest Bob
to switch to a train. But there is no full integration of
a TIS, a booking of the service is not possible. The
component in the vehicle is not connected to other
mobility applications and thereby is not able to sup-
port any of the other use cases.
4 APPROACH
As concluded in the last section, none of the solutions
discussed so far supports all use cases presented and
integrate carsharing vehicles into TIS. The approach
presented in this section is similar to (K
¨
ummerling
et al., 2013) but does not require the user to manually
apply his settings.
4.1 Architecture
For Scenario 1, the TIS has to be able to synchronize
the user’s preferences with the car. Before the start
of the booking, it has to send the vehicle all applica-
ble preferences of the user it knows. The carsharing
vehicle has to apply these preferences before the user
arrives at the car. During a trip it has to propagate all
changes in the preferences back to the TIS. The TIS
then stores these settings to reapply them at the next
booking. For Scenario 3, the TIS has to be able to
track the position of the carsharing vehicle. On a reg-
ular basis, it should check whether the user is still tak-
ing the optimal route with regard to the current traffic
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
314

TIS VRS
Vehicle
Website
/ App
Driver
IXSI
New Protocol
Proprietary
Figure 1: Sketch of the proposed architecture. Arrows indi-
cate information flow, dashed arrows indicate user interac-
tion.
and the current location of the vehicle. If the optimal
route changes it has to propagate this change back to
the carsharing vehicle which notifies the user. Thus,
the part of the architecture deployed to a carsharing
vehicle has to be able to identify its location and to
expose it to the TIS. Additionally, it has to be possi-
ble to change the current destination of the navigation
system, preferably with the option to notify the user
about this change and to ask for approval.
The carsharing operator uses a Vehicle Rental
System (VRS), which is connected to the vehicles to
manage bookings and to track the state of the car (lo-
cation, mileage, etc.). This is done via an onboard
unit, which is installed in the car. One of these solu-
tion is “CloudBoxx”
5
by Invers GmbH. Among oth-
ers, it offers the management of vehicle access and
connectivity between the vehicles and the servers of
the carsharing provider. Given these capabilities, it is
possible to deploy an additional software to such an
onboard unit to manage vehicle preferences. Once
deployed in a vehicle, such a software component
is difficult to access and thus should be designed to
require low maintenance. To minimize the possible
need for updates, it should contain a minimal amount
of logic. Our approach uses this existing carsharing
infrastructure and does not require additional hard- or
software. This also has some further advantages. In-
stead of giving one TIS full access to all carsharing
vehicles, the access rights can be managed by the car-
sharing provider. Also the scalability is better, as a
TIS does not have to communicate with potentially
thousands of vehicles, and the vehicles do not have to
communicate with multiple TIS’s.
By including the driver, the architecture depicted
in Figure 1 emerges. The driver communicates with
the TIS over the website of the TIS or its mobile ap-
plication. Additionally he or she indirectly communi-
cates with the module installed in his or her carsharing
vehicle by modifying preferences or by responding to
destination changes.
5
http://cloudboxx.invers.com/index.en.html
4.2 Data Models and Protocols
After introducing particular components of the archi-
tecture, the next step is to discuss data models and
protocols used by these components for communica-
tion. The communication between TIS and website /
mobile application is not covered here as it is usually
proprietary.
The update of the status of the current trip is mod-
eled by a TripProgress. A TripProgress consists of a
coordinate which represents the current location, the
progress on the route as percentage or the estimated
arrival time, depending on the preferences of the car-
sharing provider and the user. Futhermore, it contains
a timestamp to match it to a specific point in time.
The modeling of Preferences is not as straightfor-
ward. The value of a Preference can have an arbitrary
type. They can range from a simple decimal value to
configure the volume of the speakers to a set of angles
to configure the seat position. To keep the handling
of these various types of values simple, the idea is
to store them as one decimal or one string value. For
most preferences either one or both of these properties
are sufficient (e.g., the volume or temperature). All
other settings can be encoded in these properties (the
set of angles for example could be encoded as a string
value). Different preferences are distinguished by
their type property. A value of a type is a fixed string
identifying a preference across different vehicles, car-
sharing providers and TIS’s. In order for this to be
possible, types have to be standardized, an appropri-
ate standardization could be based on the Automo-
tive Ontology (Feld and M
¨
uller, 2011). Finally, each
preference has a boolean property to encode whether
its value depends on certain vehicle components or
whether it is universal. The vehicle components are
determined by definition of its type and context of the
booking. In case a preference is universal, its value
has to be encoded as specified by its type.
TIS to VRS Communication
As mentioned in Section 2, one protocol designed for
the communication between a TIS and a car sharing
provider is IXSI. It defines different loosely coupled
services. These services include static data, availabil-
ity of vehicles, booking and pricing information. The
smart car extension (Beutel et al., 2016b) adds two
additional services to IXSI to allow the remote config-
uration of preferences (referred to as service 10 in the
standard specification) and to set and track the current
trip (service 11). Each service offers the possibility to
set preferences or the destination via a request and
the possibility to subscribe to changes of preferences
Integration of Private and Carsharing Vehicles into Intermodal Travel Information Systems
315
:VRS
:Vehicle
CONNECT
ACK
SET
ACK
SUBSCRIBE
ACK
PUSH
. . .
UNSUBSCRIBE
ACK
Figure 2: Interaction protocol between a VRS and a vehicle.
and the trip progress. Users’ preferences are mod-
eled by a set with elements of the type BookingSet-
ting. Each BookingSetting contains a BookingSet-
tingsClassType defining the type of the preference, a
decimal, a string value, the id of the current booking
and a boolean value indicating whether it depends on
the current booking target. This boolean value can
be used by the carsharing provider to indicate a pref-
erence depending on a specific vehicle component.
The trip progress is modeled by the type Booking-
ProgressType. Its properties are the time stamp of
the point of time the progress was determined, the
ETA, the current position and progress. Because of
the privacy considerations discussed in the design of
the carsharing provider, the latter two properties are
optional. After the booking of the vehicle, the TIS
sends a SetNavigationDestinationRequest to the VRS
containing the coordinates of the destination of the
current trip. If the destination is successfully applied,
the VRS sends the associated response. The next step
of the TIS is to send a BookingProgressSubscription-
Request. This enables the subscription of trip updates.
Subsequently, the VRS sends messages containing the
current booking process. If the TIS intends to change
the destination, it simply sends a SetNavigationDesti-
nationRequest again. The VRS continues to send up-
dates of the booking process until the vehicle arrives
at the destination or the TIS terminates the subscrip-
tion.
VRS to Vehicle Communication
For the communication between the VRS and the ve-
hicle, an information exchange protocol has been de-
veloped. Its structure is inspired by the smart car ex-
tension of IXSI discussed in the last section. Simi-
lar to IXSI, it allows to set preferences and the des-
tination in a request / response scheme and allows
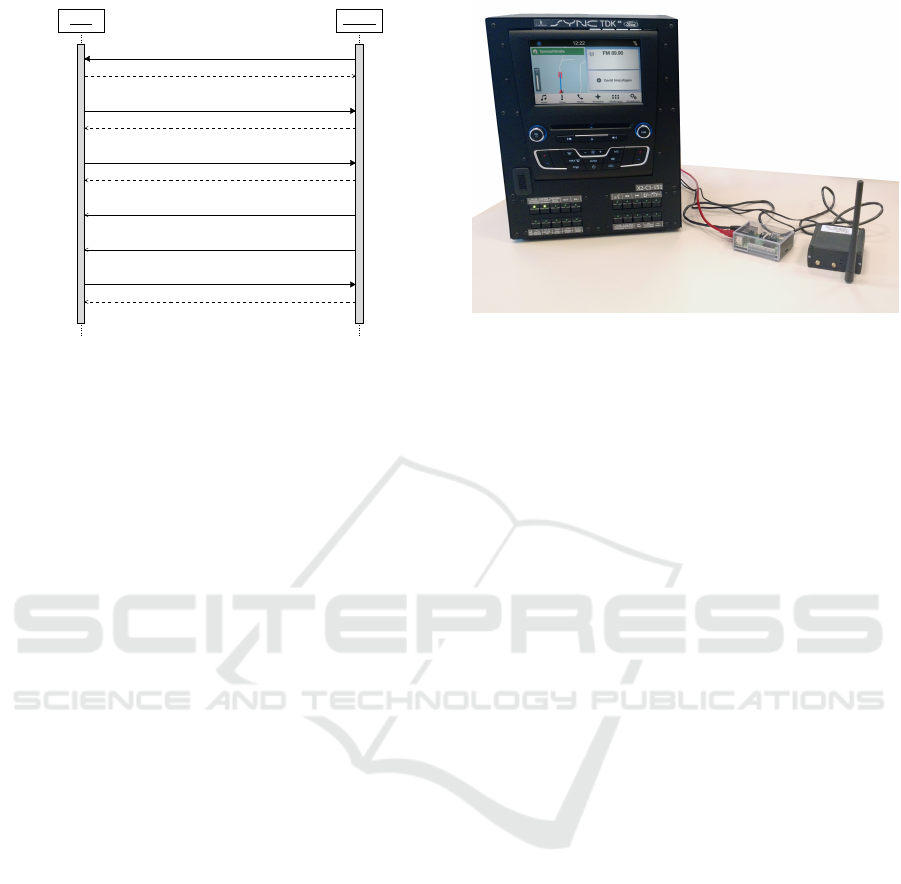
Figure 3: Implementation setup with the Ford TDK, a Rasp-
berry Pi (a mini computer) and a cellular network router.
asynchronous subscriptions to listen for trip updates
and for changes in the preferences. Because of the
requirement of asynchronous subscriptions and bidi-
rectional communication, the protocol is designed to
work on top of WebSockets. The data model of the
protocol outlined in this section is similar to the one
discussed at the beginning of this section and the one
used in IXSI. Each message consists of an ID, a type
and a body. The ID of a message is unique in re-
gard to the current session. A type can be one of the
following: CONNECT, SET, SUBSCRIBE, UNSUB-
SCRIBE, PUSH, ACK or NACK. The body of a mes-
sage depends on its command. A possible protocol
interaction is illustrated in Figure 2.
5 IMPLEMENTATION
The goal of the implementation is to create a proto-
type of the proposed architecture to prove its feasibil-
ity. To limit the scope of the prototype, the goal is
to only implement a client on the vehicle side and a
component for a VRS.
5.1 Vehicle Module
Instead of an actual car, a Technical Development Kit
(TDK), the Ford SYNC Gen3 TDK X2, is used for
the implementation. It contains the current genera-
tion of infotainment systems which are deployed in
vehicles built by Ford and Lincoln. The included
infotainment system consists of a large touchscreen,
built-in speakers, a CD player and buttons to control
the radio, the heating and the air conditioning. As
in a normal vehicle, the communication between the
components works over a Controller Area Network
bus (CAN bus). Beside the messages necessary for
the functionality of the infotainment system, the TDK
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
316

contains a module which simulates CAN traffic for
further modules of the car which are not included in
the TDK. These include, for example, the state of the
locking system or the ignition of the vehicle. A set
of buttons at the bottom of the TDK allows to send
messages over the simulated CAN bus.
Figure 3 shows a picture of the implementation
setup with the TDK, a Raspberry Pi and a cellular
network modem. The Raspberry Pi represents the car-
sharing onboard unit.
In the following, two methods are discussed which
could enable the implementation of the proposed ve-
hicle client. Smart Device Link (SDL) is a standard
to connect a driver’s smartphone with the infotain-
ment system inside vehicles
6
. It was originally devel-
oped by Ford and integrated in their vehicles under
the name AppLink
7
. SDL is designed to work with
applications running on the driver’s smartphone. Ad-
ditionally, the connected device has to be linked with
the infotainment system and the applications have to
be manually started by the driver. Thus, SDL in its
current form is not a suitable solution for the imple-
mentation of the vehicle module. In contrast to us-
ing SDL, accessing the vehicle over the CAN bus is a
rather low level approach. Due to the standardization
of OBD-II, a common interface to access the CAN
bus exists in most vehicles. OBD-II is a standard
to diagnose malfunctions in various vehicle compo-
nents. Though the protocols used in OBD-II and the
CAN bus are standardized, the implementation varies
between different manufactures and between different
vehicle generations. Unfortunately, none of the ap-
proaches presented above is an ideal solution to im-
plement a vehicle client as designed in Section 4.1.
To create a prototype for the vehicle client, the solu-
tion to access the vehicle via the CAN bus has been
preferred to the approach of using SDL. To get access
to the CAN bus of the TDK, the adapter OBDLink
SX by ScanTool
8
has been used. It was possible to
identify a few CAN bus messages to read and set the
state of vehicle settings. The first preference is the
volume of the infotainment system. The volume can
be set by sending its value (between 0 and 30) to the
CAN bus. Unfortunately, no way was found to di-
rectly query the value of the current volume. To be
able to report the current volume to the VRS, the idea
is to set the volume at the start of each session (either
to the value provided by the TIS or a default one) and
to track its changes. The second preference identified
is the current frequency of the radio. Messages were
found which are sent when the knob to change the fre-
6
https://smartdevicelink.com
7
https://developer.ford.com/pages/sdl
8
https://www.scantool.net/obdlink-sx/
Car Sharing Provider
Sessions
Id Settings Open
8a3de
TEMPERATURE POSITION
false
ada65
TEMPERATURE POSITION
true
Preferences
Type Decimal Value String Value
TEMPERATURE
Destination
Latitude:
Longitude:
Trip Progress
Position
Vehicle 94403
Position
Temperature
21 °C
Kartendaten © 2016 GeoBasis-DE/BKG (©2009), Google
Fehler bei Google Maps melden
Figure 4: Web clients developed to test the implementation
of the server.
quency is rotated to the left or the right. Additionally,
the current frequency is constantly broadcasted. This
is sufficient to read and set the frequency.
The next step is to implement a prototype for
the vehicle client. Python was chosen as program-
ming language for the implementation. Python al-
lows quick prototyping and libraries exist to commu-
nicate over the serial interface with the vehicle and
over WebSocket with the VRS. The implementation
is divided into two modules. The vehicle module im-
plements the communication with the vehicle over the
serial interface. It listens for changes in the prefer-
ences and exposes a method to apply a preference.
The server module handles the communication with
the VRS over the protocol defined in Section 4.2. The
implementation is build on top of websocket-client
9
,
a WebSocket implementation for Python. The mod-
ule manages subscriptions of the VRS and exposes
SET messages to other components. Additionally, it
offers a method to send changes in preferences via a
PUSH message to the subscribed VRS. When start-
ing the client, it configures the adapter as described
above. Afterwards, it establishes a connection to the
VRS server and sends a CONNECT message. Then it
waits for changes in the preferences or for SET mes-
sages. As soon as one of them arrives, they are for-
warded to the respective module.
9
https://github.com/liris/websocket-client
Integration of Private and Carsharing Vehicles into Intermodal Travel Information Systems
317

5.2 Server
To supplement the vehicle client, a server was cre-
ated that mocks the behavior of a VRS in the pro-
posed architecture. It was implemented in Java as
a Spring Boot
10
application. The implementation is
separated into three modules. The core module han-
dles the management of vehicle sessions. If a new
vehicle client connects to the server, a vehicle session
is stored in the session store. A vehicle session is an
abstraction of the connection between the server and
the vehicle client which exposes the functionality of
the underlying protocol. The core module offers inter-
faces to backend and frontend modules. Both types of
modules are designed to be interchangeable and to al-
low multiple implementations to work in parallel. As
a consequence it is possible to extend the server with
compatibility for other protocols. The backend mod-
ule handles the connection with the vehicle client. It
implements the protocol used to communicate with
the vehicle and provides it as an implementation of
a vehicle session. When a vehicle establishes a con-
nection and sends a CONNECT message, it adds the
session to the session store of the core module.
To allow the testing of features not supported by
the vehicle client described in the previous section, an
additional web client, has been implemented which
simulates a vehicle (Figure 4). It displays its current
location on a map and provides simulated preferences
as a slider. Besides testing additional features, this
allows to test the system with multiple connected ve-
hicles.
6 EVALUATION
The goal of this section is to evaluate how far the de-
sign and implementation support the use cases listed
in Section 3 and how them compare to the systems
presented in Section 2.
6.1 Methodology
The test setup for the integration test includes the
TDK, a Raspberry Pi, a cellular modem and a test
computer. The server component discussed at the end
of the last chapter is deployed on the test computer.
The vehicle client is deployed on the Raspberry Pi.
The OBDLink SX adapter connects the TDK with the
Raspberry Pi. The cellular modem is connected to
the Raspberry Pi to allow network access under con-
ditions similar to that in an actual vehicle. Over this
10
https://projects.spring.io/spring-boot/
connection, it can connect to the server on the test
computer.
To initialize the preferences, a radio station and
the volume is configured on the TDK. The vehicle
client notices these changes and sends PUSH mes-
sages to the server. As a result, the table displaying
the preferences gets updated. If one modifies the pref-
erences in the web client of the carsharing provider, it
sends a SET message to the vehicle client. This then
appropriately applies the preferences to the TDK.
To test the system with multiple vehicles, the ve-
hicle web client can be used to simulate additional ve-
hicles. As soon as it opens in the browser, it connects
to the server and is displayed as an additional session
in the web client of the VRS. By clicking on this new
session in the web client, it can be simulated that the
user switches to another vehicle. The VRS releases
the previous vehicle client of the TDK and terminates
its subscriptions. As a second step, the session of
the web vehicle client is acquired and subscriptions
for preferences and the trip progress are created. Ad-
ditionally, all currently known preferences (currently
displayed in the preferences part of the screen) are
sent in a SET message to the client. The client is then
automatically configured with the known preferences.
The vehicle web client can then be additionally
used to test the subscription of trip updates and the
change of the destination. By entering a coordinate
in the destination field of the VRS web client, a SET
message with this destination is sent to the vehicle
client. This moves the destination marker (red) in the
map to the corresponding location. If the marker of
the current location (green) is moved, the client sends
a PUSH message with the appropriate trip progress to
the server.
6.2 Results
The designed system supports all use cases presented
earlier. It is able to set the destination of the naviga-
tion system before the user arrives at the vehicle and
can change the destination during a trip, based on trip
progress updates it receives from the vehicle. There-
fore, it supports the Scenarios 2 and 3. Though the
server implemented and the vehicle web client sup-
port the functionalities required, it was not possible to
implement them in the vehicle client. We do not know
whether it is possible to set the destination of the nav-
igation system via messages over the CAN bus.
Additionally, the system is able to apply arbitrary
preferences to a vehicle before the user arrives and is
able to listen to their changes. In contrast to the Mo-
bility Profiles proposed in (K
¨
ummerling et al., 2013),
the functionalities discussed above work without ad-
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
318

ditional interaction with the driver. Finally, the de-
signed system works across the boundaries of differ-
ent carsharing providers. The reason for this is that
the core logic of the system is located at the TIS and
thus preferences can be applied to vehicles of all car-
sharing providers supporting the system. Although,
only a limited set of preferences has beeen imple-
mented into the vehicle client, the supported prefer-
ences show that the general approach is working and
therefore Scenario 1 is possible.
7 CONCLUSION AND OUTLOOK
In this work, a system was proposed to integrate car-
sharing vehicles into intermodal travel information
systems. To guide the design process and to create a
base for evaluation, use cases were defined. The sys-
tem was designed to enable continuation of a user’s
navigation via the navigation system integrated in a
carsharing vehicle and furthermore to configure car-
sharing vehicles according to the preferences of the
user. The progress compared to similar approaches
lies in the integration of the navigation system and
the removal of necessity of any user interaction. To
prove the feasibility of the proposed architecture, a
prototype of a vehicle client and a prototype of a VRS
were built. Comparing the features provided by the
prototype with the listed use cases showed that the ap-
proach is a viable first step to integrate carsharing ve-
hicles into intermodal travel information and by that
improve the travel experience.
The next step is to complete the implementation of
the proposed architecture. This includes an extension
for an existing TIS to manage the user’s preferences.
Such a system should be able to reason about pref-
erences to infer them for new vehicles. Additionally,
a robust implementation of vehicle clients is neces-
sary. The most promising way of realization is that
manufacturers implement these functionalities in their
vehicles natively. As mentioned in the introduction,
the popularity of carsharing increases. If the system
proposed in this work is able to accelerate this trend,
which has to be evaluated, an automobile manufac-
turer could gain a competitive advantage in the market
of carsharing vehicles. Last but not least, the system
is to be assessed for user feedback in a realistic sce-
nario with a real car.
ACKNOWLEDGMENTS
This work was conducted in cooperation with Ford
Research and Innovation Center Aachen.
REFERENCES
Berylls Strategy Advisors (2015). Carsharing – der
große Durchbruch steht noch bevor [german].
http://www.berylls.com/media/informationen/
downloads/presse/150216 Berylls Carsharing -
PM Slides.pdf, visited 2017-08-19.
Beutel, M. C., G
¨
okay, S., Kluth, W., Krempels, K.-H.,
Ohler, F., Samsel, C., Terwelp, C., and Wiederhold,
M. (2016a). Information Integration for Advanced
Travel Information Systems. Journal of Traffic and
Transportation Engineering, 4(4):177–185.
Beutel, M. C., G
¨
okay, S., Kluth, W., Krempels, K.-H., Sam-
sel, C., and Terwelp, C. (2014). Product oriented in-
tegration of heterogeneous mobility services. In Pro-
ceedings of the 17th International Conference on In-
telligent Transportation Systems (ITSC 2014), pages
1529–1534, Qingdao, China. IEEE.
Beutel, M. C., G
¨
okay, S., von Grumbkow, P., Hill-
brecht, D., Krempels, K.-H., Samsel, C., Terwelp,
C., Twele, H., and Wagner, H. (2016b). Mobility-
Broker Interface with Smartcar Extension based on
IXSI - Interface for X-Sharing Information Version
4. https://rwth-i5-idsg.github.io/downloads/ixsi/ixsi-
docu-smartcar-english-version.pdf, visited 2017-08-
20.
Feld, M. and M
¨
uller, C. (2011). The Automotive Ontology:
Managing Knowledge Inside the Vehicle and Shar-
ing it Between Cars. In Proceedings of the 3rd In-
ternational Conference on Automotive User Interfaces
and Interactive Vehicular Applications (AutomotiveUI
2011), pages 79–86, Salzburg, Austria. ACM.
Kalmbach, R., Bernhart, W., Grosse Kleinmann, P.,
and Hoffmann, M. (2011). Automotive land-
scape 2025: Opportunities and challenges
ahead. Roland Berger Strategy Consultants.
http://www.rolandberger.com/media/pdf/
Roland Berger Automotive Landscape 2025
20110228.pdf, visited 2017-08-18.
Klein, N. J. and Smart, M. J. (2017). Millennials and car
ownership: Less money, fewer cars. Transport Policy,
53:20–29.
Kluth, W., Beutel, M. C., G
¨
okay, S., Krempels, K.-H., Sam-
sel, C., and Terwelp, C. (2015). IXSI - Interface for
X-Sharing Information. In Proceedings of the 11th In-
ternational Conference on Web Information Systems
and Technologies (WEBIST 2015), Lisbon, Portugal.
K
¨
ummerling, M., Heilmann, C., and Meixner, G. (2013).
Towards Seamless Mobility: Individual Mobility Pro-
files to Ease the Use of Shared Vehicles. In Pro-
ceedings of the 12th IFAC/IFIP/IFORS/IEA Sympo-
sium on Analysis, Design, and Evaluation of Human-
Machine Systems, pages 450–454, Las Vegas, USA.
IFAC HMS.
Shaheen, S. and Cohen, A. (2007). Growth in worldwide
carsharing: An international comparison. Transporta-
tion Research Record: Journal of the Transportation
Research Board, (1992):81–89.
Integration of Private and Carsharing Vehicles into Intermodal Travel Information Systems
319
