
The Incorporation of Drones as Object of Study in Energy-aware
Software Engineering
Luis Corral
1
, Ilenia Fronza
2
and Nabil El Ioini
2
1
Monterrey Institute of Technology and Higher Education / Autonomous University of Queretaro
E. Gonzalez 500, 76130, Queretaro, Mexico
2
Free University of Bozen-Bolzano
Piazza Domenicani 3, 39100, Bolzano, Italy
Keywords:
Drone, Energy, Software.
Abstract:
As drones expand their ability to perform longer and more complex tasks, one of the first concerns that rise is
their capacity to perform those tasks in a reliable way. Reliability can be understood from different aspects: the
ability of the drone to perform accurately, safely and autonomously. In this paper, we focus on understanding
the current efforts to ensure the last quality, autonomy, from the point of view of energy-awareness for drone
systems. It emerges that drones as object of study in energy aware Software Engineering is still an emerging,
unexplored area, which requires to learn from advances and experimentation in other mobile and ubiquitous
devices like cellular phones or tablets. Still, it is required to understand the opportunities and limitations of
drones as computational targets. A research agenda should be set and followed to leverage software as an
opportunity to foster drones as energy-aware devices.
1 INTRODUCTION
Unmanned aerial vehicles, more popularly known as
drones are aircraft that have no on-board, human pi-
lot (Clarke, 2014). The drone industry has been an
interesting topic for the past years, and the focus of
many discussions in the technology sector. The syn-
ergy between hardware and software, the continuous
evolution in drone technologies and the identification
of novel application fields have consolidated drones
as an opportunity for innovation and an interesting ob-
ject of study.
Large drones have been used for years by many
countries, mainly for military purposes. After their
consolidation as a tool for defense industry, the ca-
pabilities of drones have increased, and their man-
ufacturing costs have been greatly reduced. There-
fore, drones have attracted many parties to consider
their capabilities for civil applications. Moreover,
applications in non-critical fields have expanded to
field recognition, entertainment or air delivery, which
is already a reality that several companies are ex-
perimenting (de Fatima Bento, 2008). The use of
drones in mission-critical applications is also expand-
ing: drones have been used in disaster zones, recog-
nition of sites unreachable by land, mapping, delivery
of vital goods and medical aid (Starr, 2014).
Research and experimentation on drones have re-
ceived a good amount of attention from academics,
practitioners and enthusiasts. The areas of applica-
tion for unmanned aerial vehicles span from simple
entertainment to professional fields.
As drones expand their ability to perform longer
and more complex tasks, one of the first concerns that
rise is their capability to perform those tasks in a de-
pendable way. Reliability can be understood from dif-
ferent points of view, for instance the ability of the
drone to perform accurately, safely and autonomously
(Wong, 2015). In that sense, the autonomy of a drone
depends highly on the energy that its power source
(i.e., a battery) can provide, in conjunction with the
weight, payload and other operational aspects of the
drone itself.
In those aspects, we may include the software that
operates the drone. In the field of non-stationary,
energy dependent systems, Software Engineering for
energy-aware applications is a seasoned research area
that has helped to accomplish important goals lever-
aging software to reduce the energy consumption in
mobile targets (e.g., cellular phones, tablets, wire-
less sensors, wearables, and others). Like all these
devices, drones must rely on their battery capacity,
which is as well one of the most important limitations
to their operation. As a result, the potential useful-
Corral, L., Fronza, I. and Ioini, N.
The Incorporation of Drones as Object of Study in Energy-aware Software Engineering.
DOI: 10.5220/0006338607210726
In Proceedings of the 19th International Conference on Enterprise Information Systems (ICEIS 2017) - Volume 2, pages 721-726
ISBN: 978-989-758-248-6
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
721
ness of drones is prevented by the energy constraint.
Therefore, there is a clear need to accomplish a more
efficient battery usage to reduce the power demand of
drone targets.
The goal of this paper is to understand the in-
troduction, growth and status of drones as an object
of study in energy-aware Software Engineering, fo-
cusing on understanding the current efforts to ensure
the last quality, autonomy, from the point of view of
energy-awareness for drones.
The rest of the paper is structured as follows:
Section 2 reviews the development of drones and
their consolidation as energy-aware systems; Section
3 identifies the current available literature on energy-
aware Software Engineering for drones; Section 4
maps and discusses the current research literature that
crosses the roads between drone development and
energy-aware Software Engineering; Section 5 dis-
cusses identifiable trends in this research track. Fi-
nally, Section 6 sets tracks for future research and
draws conclusions.
2 DEVELOPMENT OF DRONES
AS ENERGY-AWARE SYSTEMS
There is no official, standard classification of un-
manned aerial vehicles. We can outline a division on
the basis of private use for recreation or use for air
work. Nevertheless, one of the most important char-
acteristic upon which to make a categorization is the
size. A very clear distinction exists between large and
small drones. In the small category, there is further
classification into nano, mini and micro drones. Fur-
ther distinction is made upon the endurance and range
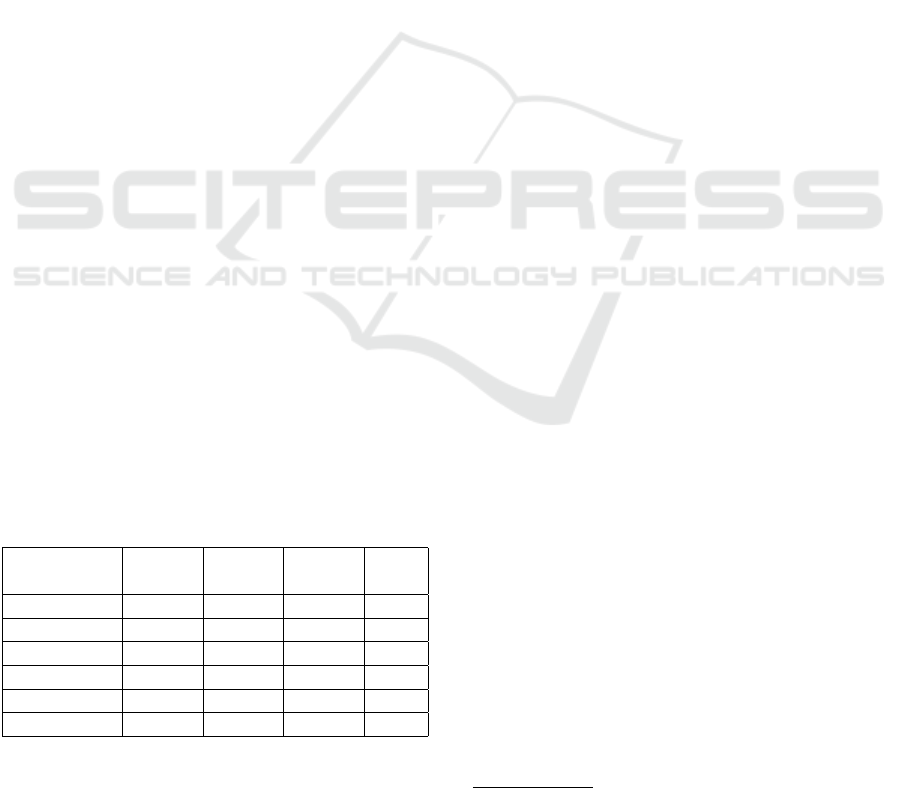
values. Table 1 shows a categorization of drones
which is based on (Sydney, School of Surveying &
Spatial Information Systems Faculty of Engineering,
2016; Abdullah, 2016; Watts et al., 2012).
Table 1: Drones classification.
Category
name
Load
(kg)
Range
(km)
Alt.
(m)
Life
(hrs)
Nano 0.1 1 100 0.5
Micro 5 <10 250 1
Mini <25 <10 300 2
Close range 25-150 10-30 3000 2-4
Mid-range 50-250 30-70 3000 3-6
High range >250 >70 >3000 >6
In terms of operation, airworthiness is one of the
most important qualities for drones (Corral et al.,
2015). This term is used to point out the suitability
of the aircraft for a safe flight. A drone is said to exe-
cute a safe flight when its attitude and manageability
stay within its operating parameters. One of the key
attributes that drive drones airworthiness is to have
sufficient power to assure height, movement and op-
erability for all the duration of the flight. Other impor-
tant characteristics of drones are size, maximum alti-
tude, endurance and range of the device’s data links,
as stated by (de Fatima Bento, 2008). Technological
advances have led to great capabilities of drones ris-
ing many beneficial ways in diverse application fields.
The market has grown enough as to offering to
the user different types of drones which respond to
specific needs and provide specific capabilities. Also,
hardware accessories, such as GPS chips, enable the
aircraft to be always aware of its position, cam-
eras allow observation capture of image and footage,
built-in torch lamps permit drone operation at night.
Lightweight energy sources (such as LiPo batteries,
which are among the most common batteries used to
power drones) provide the possibility for other on-
board facilities.
Nowadays, small drones are able of carrying and
delivering load: the first air delivery from Amazon
is already a reality, and an Australian start-up used a
drone to carry 4.5 kg of medical aid from Virginia to a
clinic about a mile away in a 3-minute flight
1
. Aerial
photography is no longer just a hobby: many product
advertisements include aerial footage and companies
pay generous amount of money to make their prod-
ucts attractive. For example, drones have been pro-
posed as tool for real estate sales; also, big-budget
Hollywood movies are moving towards drones which
offer economic aerial footage. Drones have also been
used during sports and cultural events to provide full
coverage of them. Sochi 2014 Winter Olympics was
the first sports event to offer footage of snowboarders
in action thanks to the operation of drones.
However, using drones in all these targets require
them to be unquestionably airworthy. For instance,
there was an event where a drone was used to pro-
vide full coverage (the 3-Tre FIS Alpine Ski World
Cup 2016 in Madonna di Campiglio, Italy). A drone
crashed out of the sky, landing barely behind the skier
as he made his way down the track. The hypothesis is
that the battery was discharged (Trentino, 2015).
Compared to large flying devices, drones reflect a
wider range of technical limitations such as load ca-
pacity they can carry, flight duration (10-20 minutes),
and limited flight range and speed. As drones are in-
creasingly being used all over the world, their usage
must fit a regulatory framework. Many basic national
1
http://www.australiaunlimited.com/business/the-rise-
of-the-drones
ICEIS 2017 - 19th International Conference on Enterprise Information Systems
722

safety rules apply, but are not the same all over Eu-
rope. The European Aviation Safety Agency (EASA)
has published a Technical Opinion on the operation
of drones which will be used as the basis for all future
work related to drone usage
2
. The American Federal
Aviation Administration (FAA) requires that anyone
who owns a drone of a certain weight (more than 250
gr and less than 25 kg) must register it before flying
outdoors
3
.
3 DEVELOPMENT OF DRONES
AS ENERGY-AWARE SYSTEMS
In the last years, the economization of energy in com-
puter equipment has become a popular research topic
because of the high impact of power consumption in
different computing ecosystems. For example, there
is a big need of reducing power usage on battery-
powered equipment (e.g., phones, tablets, wearables,
drones, etc.) considering that power consumption di-
rectly impacts the device’s operation and autonomy.
At the same time, it is not desired to decrease perfor-
mance, dependability and other operational qualities
in favor of saving energy (Boucher, 2014).
Many research works share as major goal the de-
velopment of techniques to economize the power con-
sumption of computer equipment. We can group these
projects in two families, considering their field of ap-
plication. The first group focuses on architectures,
materials and manufacturing techniques, whilst the
second one concentrates on the reducing consumption
of energy resources driven directly by the execution of
software.
The first family is purely hardware-oriented, in
which the main topics include semiconductor tech-
nologies, microprocessor arrangement, prevention of
heat and power dissipation, and other similar top-
ics. They analyze how electronic components can
be designed and manufactured in such fashion to de-
liver the highest processing capabilities without de-
manding the usual loads of energy required by elec-
tronic components. This research track belongs to
the fields of electrical engineering, electronic engi-
neering, semiconductor technology and similar disci-
plines.
On the other hand, a second family of research
works focuses in understanding the impact of soft-
ware in power usage. That is, they study and ana-
lyze how software products can contribute to have a
2
https://www.easa.europa.eu/document-library/
opinions/opinion-technical-nature
3
https://registermyuas.faa.gov
perceptible effect on the demand of energy of the sys-
tem. Consequently, some of those works also concern
on studying how software products can be prepared
to utilize more efficiently the available hardware re-
sources. In this way, from the design and execution
of the software point of view, the hardware should re-
ceive instructions previously engineered to maximize
its capabilities while using less energy.
In this field, it has been analyzed the influence
of the different stages of software execution in the
overall power consumption in a machine, including
compiling techniques, context switching, memory ac-
cesses, etc. (Min et al., 2012; Vallina-Rodriguez and
Crowcroft, 2013; Vieira et al., 2012).
Drones with increasing operative capabilities open
a wide range of service and revenue opportunities
where energy consumption can be an important road-
block and can prevent the drone from accomplish its
mission. In consequence, it is necessary to have both
hardware and software strategies to administrate bet-
ter the way in which the drone will invests its energy
resources for the best benefit of its operation.
4 SOFTWARE ENGINEERING
RESEARCH ON ENERGY
AWARENESS FOR DRONES
To understand better the current progress of energy-
aware Software Engineering applied to drones, we
surveyed three major digital libraries (i.e, IEEE
Xplore, ACM Digital Library and ScienceDirect)
looking for research papers that cover different per-
spectives for designing and implementing energy
aware software. To make a final selection of the most
relevant research works, we established as criteria:
1. research works should describe a technique for the
design, implementation, evaluation, measurement
or optimization on energy consumption in drones;
2. the proposed technical approach should have been
put in practice in at least one case study.
To ensure a current orientation of the topic at
hand, we considered only papers published from 2015
to the date. The selection of this date is not arbitrary,
but it represents a turning point in the number of re-
search works in this topic, according to the volume
found in the mentioned libraries.
As exclusion criteria, potential duplicated in-
stances shall be dismissed. Research papers that do
not relate to software design, development and im-
plementation shall be dismissed as well. The initial
retrieval of the available literature was done using a
series of keywords to search, as shown in Table 2.
The Incorporation of Drones as Object of Study in Energy-aware Software Engineering
723
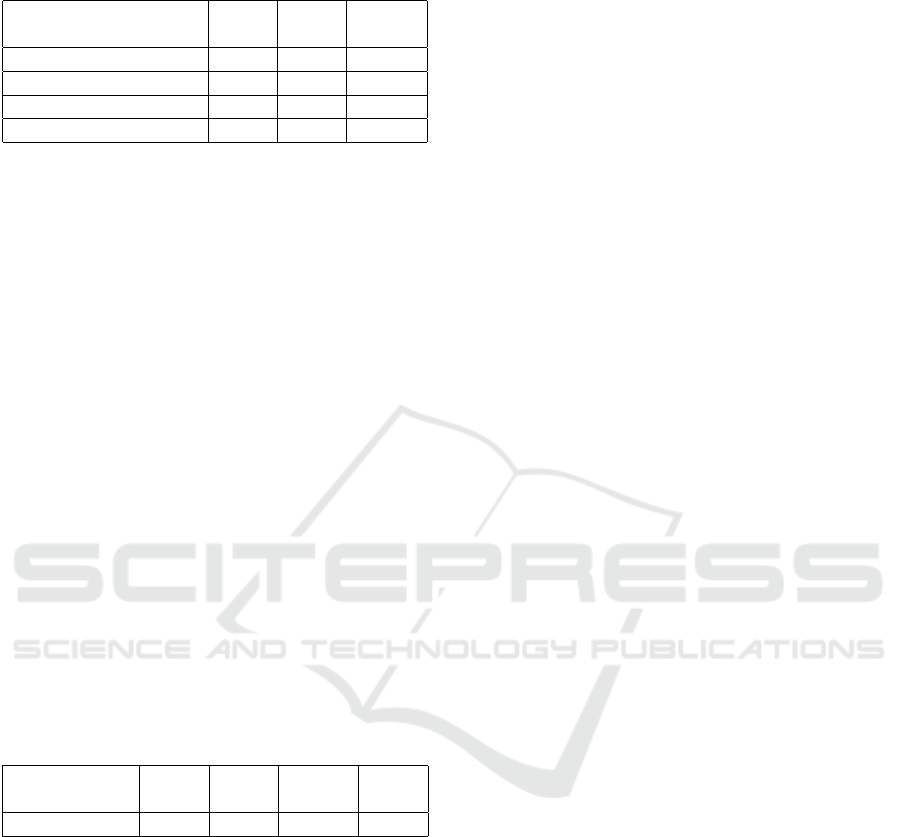
Table 2: Survey in energy awareness for drones: keywords
and numeric results before the exclusion criteria is applied.
Keyword IEEE ACM Science
Direct
Drone 476 163 1301
“Drone consumption” 0 0 0
“Drone optimization” 0 0 0
“Drone energy” 1 3 2
Table 2 also shows the numeric results of the anal-
ysis of the state of the art in this field. The num-
ber of references about drone development (includ-
ing energy aspects) in non-academic sources is large.
Newsrooms, divulgation sources, technology maga-
zines and several more references cover different as-
pects of drone development in a way that the topic is
appealing to a general audience. This high volume of
information confirms the broad interest of drones and
their application. However, this number of sources
contrasts with the low number of academic references
available in the referred libraries. Despite the large
number of papers about drones, from Table 2 we can
also understand that as a research topic, energy aware-
ness for drones is still emergent, and that professional
research about it is uncommon.
Taking as starting point the papers surveyed from
the digital libraries, we had to handpick the research
papers about drones that also concerned about energy
consumption. We also extracted a second group of
papers from relevant citations and references. The re-
sult of this selection is a group of 10 research papers
distributed as shown in Table 3.
Table 3: Survey in energy awareness for drones: keywords
and numeric results after the exclusion criteria are applied.
Keyword IEEE ACM Science
Direct
Other
Cited
Drone energy 1 3 2 4
(Park et al., 2016) identified the low volume of re-
search works in energy aware techniques for drones,
discussing that energy efficiency and battery aging af-
fect the drone delivery business. Authors discuss that
no prior work has extensively assessed the problem
for energy awareness in the drone business. In their
paper, authors propose a holistic and detailed analysis
on the profitability and time to delivery of the drone
delivery business.
(Clarke, 2014) outlines critical attributes for the
airworthy operation of a drone. Even though almost
all the characteristics concern the maneuverability,
safety, and other airborne conditions of the drone, the
author also mentions characteristics related to the re-
source usage of the device; for instance, providing “a
sufficient source of power to maintain movement, to
implement the controls, and to operate sensors and
data feeds, for the duration of the flight” and “the abil-
ity to navigate to destination locations within the op-
erational space”.
In software-based approaches used for battery op-
timization in drones, currently there is no software so-
lution available on the market to optimize the battery
consumption in a target platform as drones. A sug-
gested research agenda is identified by (Corral et al.,
2015), whose paper aims at establishing a method-
ology to design and implement software-driven ap-
proaches to measure and optimize drone’s energy
consumption. The same authors also present research
works that exemplify methods to measure the energy
consumed by drones (Corral et al., 2016a) and to opti-
mize energy consumption in drones using preset flight
profiles (Corral et al., 2016b). Following this ap-
proach, authors claim to accomplish savings up to
about 5.6 seconds of the total flight time, showing
a very low but noticeable contribution to the overall
drone autonomy.
(Zorbas et al., 2013) studied a mathematical for-
mulation for minimizing the total energy consump-
tion of a fleet of camera-enabled drones, depending
on the localization and height of the event they should
cover. Following their proposed algorithm, authors
claim savings up to 150% of the total energy con-
sumed.
In a similar track proposed by Corral and Zorbas,
(Di Franco and Buttazzo, 2015) proposes an energy-
aware path planning algorithm that minimizes energy
consumption while satisfying a set of other require-
ments, such as coverage and resolution. The algo-
rithm is based on an energy model derived from real
measurements. The algorithmic approach considers
the description of the covered area and the points that
are relevant for the survey, to design a path for optimal
scan.
The research works (Pace et al., 2015; da Silva and
Nascimento, 2016; Huang et al., 2015) also concern
about algorithms to plan missions in a way that the
return home is guaranteed.
5 RESEARCH TRENDS
Our literature review shows that there are still numer-
ous opportunities for research on the field of energy
awareness for drones. Although energy-awareness for
non-stationary mobile devices is a consolidated re-
search field, the inclusion of drones as an object of
study is still emerging. In a dynamic area like energy-
aware mobile systems, new methods, technologies
ICEIS 2017 - 19th International Conference on Enterprise Information Systems
724

and tools are developed with a very fast pace; how-
ever, after carefully surveying the current state of the
art we found the need for further exploration of power
measurement and estimation techniques for drones,
as well as researching and discussing deeply in opti-
mizations at application level, due that the majority of
the works concentrate at mobile targets of a different
nature, out of the scope of the operative ecosystems
usually found in drones.
Speaking of energy-aware Software Engineering,
existing strategies are mostly based on common non-
stationary devices like smartphones. Still, in mobile
devices of this kind, software-driven solutions appear
to be slow, trend that can be applied to the case of
drones. The core of research for energy optimization
based on software, currently concentrates on design-
ing and implementing algorithmic solutions to design
better routes or drone handling. There is a big gap in
research and implementation of software-driven solu-
tions at operative or application level, that is, software
that can operate the drone in a way that can help the
complete system to work investing less energy, much
like current research in mobile devices.
Software designers and programmers for drones
can learn from the extensive work that has been done
for energy-aware software in other mobile targets:
to cite just a few, (Paul and Kundu, 2010) shows
a quantitative review of energy consumption of An-
droid software routines, compared with the energy
spent by the same routine in Angstrom Linux. In this
paper, authors survey the energy required by the ex-
ecution target under the premise that mobile devices
should concern on optimizing the battery utilization.
The work of Vieira et al. (2012) presented a perfor-
mance and energy consumption evaluation of appli-
cations of Android OS to find a pattern of energy
consumption depending on the executed algorithm.
The authors identified what kind of algorithms lead to
improved energy efficiency on this operating system.
Other work, without implementing software bench-
mark the way in which mobile apps can affect the total
energy consumption of the system, providing a pro-
found discussion on design factors that could impact
software energy efficiency (Capra et al., 2012).
Worth to mention, we can include the research and
development in materials that can provide the drone
with frames, structures and batteries, which in addi-
tion to be long-lasting, they can be as well very light
in a way that they do not contribute severely to the
overall weight of the drone.
Somatis Technologies Inc. worked on a kinetic
energy composite that turns the interaction of wind
pressure and vibrations into an electrical power en-
ergy source and suggests that it could triple the bat-
tery life for handheld and gliding drones
4
. The chip
maker Qualcomm which means to provide an opti-
mization to the chipset SnapDragon Flight for drones;
the goal is to extend the battery lifetime from 20 to 40
to 60 minutes
5
. Other experiments were carried out
using the number of batteries as a control variable. An
hexacopter was used and the battery count was opti-
mized by incrementally adding 6000 mAh batteries
(first 1 battery was added, then 4, 5 and 6) and cal-
culate the flight time based on the current draw and
vehicle charge capacity (Scaramuzza et al., 2014).
6 FUTURE WORK AND
CONCLUSIONS
Drones play a key role in the future technology land-
scape. However, their potential is limited due to bat-
tery capacity, which represents a major constraint.
For a real and profitable application in mission-
critical, highly dependable environments, in addition
to improving battery technology, a research agenda
should focus on implementing hardware and software
driven techniques to optimize the power demand of
the drone system. These techniques should relate
directly to the optimization of the energy resources
available for a mission, considering that power en-
ables not only the flight, but also the onboard facilities
that are powered (camera, webcam, beacons, etc.), as
well as the ability of the drone to complete its mission
successfully or to abort it and find a landing place in
a safe manner.
Based on the results of our literature review we
can conclude that the inclusion of drones as object of
study in energy-aware Software Engineering is still in
an initial phase with much work yet to be done. To ex-
pand this horizon, we propose the following research
tracks to leverage the power of software to economize
power usage in a mission:
• generation of energy efficient executable code for
drone applications,
• offloading of methods or computational routines
to minimize processor usage in drones,
• software-controlled presetting of economic pro-
files that can enable or disable built-in energy-
hungry components in the drone.
A critical quality and operative principle of drones
is their ability to perform at the highest standards
4
http://readwrite.com/2012/08/07/energized-new-
batteries-could-triple-drone-airtime/
5
https://developer.qualcomm.com/hardware/snapdragon-
flight
The Incorporation of Drones as Object of Study in Energy-aware Software Engineering
725

away from a permanent energy supply. Software En-
gineering is facing a rich yet challenging opportunity
to take an active role in discovering better ways to
invest better the limited energy resources of a drone.
The challenge is simple: embrace drones as object of
study to foster software as a tool to optimize the over-
all power consumption of a drone system.
REFERENCES
Abdullah, Q. (2016). Classification of the un-
manned aerial systems. https://www.e-
education.psu.edu/geog892/node/5. Accessed on
March 10th, 2017.
Boucher, P. (2014). Civil Drones in Society, Societal and
Ethics Aspects of Remotely Piloted Aircraft Systems.
Technical report, European Commission, Joint Re-
search Centre, Institute for the Protection and Security
of the Citizen.
Capra, E., Francalanci, C., and Slaughter, S. A. (2012).
Measuring application software energy efficiency. IT
Professional, 14(2):54–61.
Clarke, R. (2014). Understanding the drone epidemic. Com-
puter Law & Security Review, 30(3):230–246.
Corral, L., Fronza, I., and El Ioini, N. (2015). The future of
energy-aware software: The case of drones. Cutter IT
Journal, 28(8):19–23.
Corral, L., Fronza, I., El Ioini, N., and Ibershimi, A.
(2016a). A measurement tool to track drones battery
consumption during flights. Lecture Notes in Com-
puter Science (including subseries Lecture Notes in
Artificial Intelligence and Lecture Notes in Bioinfor-
matics), 9847:334–344.
Corral, L., Fronza, I., El Ioini, N., and Ibershimi, A.
(2016b). Towards optimization of energy consump-
tion of drones with software-based flight analysis. vol-
ume 2016-January, pages 543–546.
da Silva, R. I. and Nascimento, M. A. (2016). On best drone
tour plans for data collection in wireless sensor net-
work. In Proceedings of the 31st Annual ACM Sym-
posium on Applied Computing, pages 703–708. ACM.
de Fatima Bento, M. (2008). Unmanned Aerial Vehicles:
An Overview. Inside GNSS, 3(1):54–61.
Di Franco, C. and Buttazzo, G. (2015). Energy-aware cov-
erage path planning of uavs. In Autonomous Robot
Systems and Competitions (ICARSC), 2015 IEEE In-
ternational Conference on, pages 111–117. IEEE.
Huang, Y.-T., Ho, Y.-H., Chu, H.-h., and Chen, L.-J. (2015).
Adaptive drone sensing with always return-to-home
guaranteed. In Proceedings of the 1st International
Workshop on Experiences with the Design and Imple-
mentation of Smart Objects, pages 7–12. ACM.
Min, A. W., Wang, R., Tsai, J., Ergin, M. A., and Tai, T.-
Y. C. (2012). Improving energy efficiency for mo-
bile platforms by exploiting low-power sleep states.
In Proceedings of the 9th conference on Computing
Frontiers, pages 133–142. ACM.
Pace, P., Aloi, G., Caliciuri, G., and Fortino, G. (2015).
Management and coordination framework for aerial-
terrestrial smart drone networks. In Proceedings of the
1st International Workshop on Experiences with the
Design and Implementation of Smart Objects, pages
37–42. ACM.
Park, S., Zhang, L., and Chakraborty, S. (2016). Design
space exploration of drone infrastructure for large-
scale delivery services. In Proceedings of the 35th
International Conference on Computer-Aided Design,
page 72. ACM.
Paul, K. and Kundu, T. K. (2010). Android on mobile de-
vices: An energy perspective. In Computer and In-
formation Technology (CIT), 2010 IEEE 10th Inter-
national Conference on, pages 2421–2426. IEEE.
Scaramuzza, D., Achtelik, M. C., Doitsidis, L., Friedrich,
F., Kosmatopoulos, E., Martinelli, A., Achtelik,
M. W., Chli, M., Chatzichristofis, S., Kneip, L., et al.
(2014). Vision-controlled micro flying robots: from
system design to autonomous navigation and mapping
in gps-denied environments. IEEE Robotics & Au-
tomation Magazine, 21(3):26–40.
Starr, M. (2014). Ambulance drone delivers help to heart at-
tack victims. http://www.cnet.com/news/ambulance-
drone-delivers-help-to-heart-attack-victims/. Ac-
cessed on January 10th, 2016.
Sydney, School of Surveying & Spatial In-
formation Systems Faculty of Engineer-
ing (2016). UAV mapping concept.
http://www.sage.unsw.edu.au/currentstudents/ug/
projects/Salameh/Physical%20Characteristics.htm.
Accessed on February 5th, 2016.
Trentino (2015). Precipita un drone,
dramma sfiorato alla 3tre di campiglio.
http://trentinocorrierealpi.gelocal.it/trento/cronaca/
2015/12/22/news/. Accessed on December 26th,
2015.
Vallina-Rodriguez, N. and Crowcroft, J. (2013). En-
ergy management techniques in modern mobile hand-
sets. IEEE Communications Surveys & Tutorials,
15(1):179–198.
Vieira, A., Debastiani, D., Agostini, L., Marques, F., and
Mattos, J. C. (2012). Performance and energy con-
sumption analysis of embedded applications based on
android platform. In Computing System Engineering
(SBESC), 2012 Brazilian Symposium on, pages 59–
64. IEEE.
Watts, A. C., Ambrosia, V. G., and Hinkley, E. A. (2012).
Unmanned aircraft systems in remote sensing and sci-
entific research: Classification and considerations of
use. Remote Sensing, 4(6):1671–1692.
Wong, K. V. (2015). Research and development of
drones for peace?high power high energy supply re-
quired. Journal of Energy Resources Technology,
137(3):034702.
Zorbas, D., Razafindralambo, T., Guerriero, F., et al. (2013).
Energy efficient mobile target tracking using flying
drones. Procedia Computer Science, 19:80–87.
ICEIS 2017 - 19th International Conference on Enterprise Information Systems
726
