
PERCEPT Indoor Wayfinding for Blind and Visually Impaired
Users: Navigation Instructions Algorithm and Validation Framework
Yang Tao, Linlin Ding, Sili Wang and Aura Ganz
Electrical and Computer Engineering Department, University of Massachusetts, Amherst, MA 01003, U.S.A.
Keywords: Navigation, Blind and Visually Impaired, Navigation Instruction Validation, Unity Game Engine.
Abstract: This paper introduces an algorithm that generates indoor navigation instructions for Blind and Visually
Impaired (BVI) users as well as a validation framework that validates these instructions. The validation
framework which utilizes Unity game engine incorporates: a) a virtual environment that mirrors the physical
environment and b) a game avatar that traverses this virtual environment following action code sequences
which correspond to the navigation instructions. A navigation instruction from a source to a destination is
correct if the game avatar successfully reaches from the source to the destination in the virtual environment
following this navigation instruction. We successfully tested the navigation instruction generation algorithm
and the validation framework in a large two-story building with 66 landmarks and 1500 navigation
instructions. To the best of our knowledge this is the first automated generation instructions algorithm for
BVI users in indoor environments, and the first validation framework for navigation instructions in indoor
environments. This paper is a significant step towards the development of a cost effective indoor wayfinding
solution for BVI users.
1 INTRODUCTION
The World Health Organization reported that 285
million people are estimated to be visually impaired
worldwide: 39 million are blind and 246 million have
low vision (World Health Organization, 2016).
According to the report for the National Health
Interview Survey, 22.5 million adult Americans 18
and older reported experiencing vision loss
(American Federation for the Blind, 2016).
Independent navigation through unfamiliar indoor
spaces is beset with barriers for Blind and Visually
Impaired (BVI) users. A task that is trivial and
spontaneous for the visioned population has to be
planned and coordinated with other individuals for
BVI users. Although many improvements and aides
are available to assist the visually impaired to lead an
independent life, there has yet remain to be a
challenge to develop a system that combines
independence with scalability and affordability of
indoor navigation.
There have been a number of research projects
that aim to help BVI users navigate in unfamiliar
indoor environments. The authors in (Idrees et al.,
2015) introduce an indoor navigation application for
BVI users that uses QR codes. In (Riehle et al., 2015)
an inertial dead reckoning navigation system is
introduced which provided real-time auditory
guidance along mapped routes. NavCog (Ahmetovic
et al., 2016) is a smartphone-based system that
provides turn-by-turn navigation assistance based on
real-time localization. StaNavi (Kim et al., 2016) is a
navigation system that provides indoor directions
utilizing Bluetooth Low Energy (BLE) technology
and smartphone's built-in compass. The authors in
(Rituerto et al., 2016) report a smartphone-based
navigation aid which combines inertial sensing,
computer vision and floor plan information to
estimate the user's location. ISAB (Doush et al., 2016)
is an integrated indoor navigation system utilizing a
set of different communication technologies (WiFi,
Bluetooth and radio-frequency identification) to help
users reach destinations with a smartphone interface.
The authors in (Basso et al., 2015) present a
smartphone-based indoor localization system using a
set of sensors (accelerometer, gyroscope, electronic
compass). IMAGO (Jonas et al., 2015) is a vision-
based indoor navigation system utilizing smartphone
cameras.
PERCEPT system (Ganz et al., 2014), developed
at the University of Massachusetts 5G Mobile
Evolution Lab was developed with the cooperation of
Tao, Y., Ding, L., Wang, S. and Ganz, A.
PERCEPT Indoor Wayfinding for Blind and Visually Impaired Users: Navigation Instructions Algorithm and Validation Framework.
DOI: 10.5220/0006312001430149
In Proceedings of the 3rd International Conference on Information and Communication Technologies for Ageing Well and e-Health (ICT4AWE 2017), pages 143-149
ISBN: 978-989-758-251-6
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
143

the Massachusetts Orientation and Mobility division
from Massachusetts Commission for the Blind.
PERCEPT is deployed at Arlington subway station in
Boston, at Carroll Center for the Blind and at
University of Massachusetts administration building.
The system was successfully tested with over 50 BVI
users. PERCEPT generates landmark based
navigation instructions automatically for a specific
indoor environment. To the best of our knowledge,
PERCEPT is the only indoor navigation system for
BVI users that can generate navigation instructions
automatically. We will briefly introduce the
algorithm in this paper.
Since the number of navigation instructions
generated by the algorithm can be very large (e.g. for
a building with 80 destinations we generate over
10,000 instructions), the validation of these
instructions becomes a challenge. In this paper we
introduce a navigation instructions validation tool
using Unity game engine (Unity Technologies, 2016).
To the best of our knowledge this is the first attempt
to validate navigation instructions.
The rest of the paper is organized as follows: In
Section 2 we introduce PERCEPT navigation
instruction generation algorithm and in Section 3 we
present a tool that validates these instructions. In
Section 4, we provide a case study that shows the
navigation instructions along with their validation
process for a large indoor environment. Section 5
concludes the paper.
2 NAVIGATION INSTRUCTION
GENERATION ALGORITHM
For paper completeness we briefly introduce
PERCEPT system which was reported in (Ganz et al.,
2014). In PERCEPT system the user carries a
Smartphone (Android or iPhone) that runs PERCEPT
application that provides landmark based navigation
instructions helping the user navigate through indoor
spaces to a chosen destination. PERCEPT includes
three main modules: the vision free user interface
using Android and iPhone accessibility features, the
localization algorithm and the navigation instructions
algorithm. For localization purpose we deploy in the
indoor environment passive or active radio frequency
sensors. The passive sensors use Near Field
Communication (NFC) technology and are deployed
at specific landmarks in the environment such as
doors, elevators, escalators, etc. Using NFC
technology the user can be localized at these
landmarks only if he/she touches the sensor with the
Smartphone. Assuming the user can be localized at
each landmark, we introduced a landmark based
navigation instructions algorithm.
The input to the navigation instruction generation
algorithm includes the Blueprint and the landmarks
which include doors, elevators, stairs etc. The output
of the algorithm includes the navigation instructions.
The algorithm includes the following stages:
Stage 1: Generation of a directed graph in which
the nodes represent the landmarks. Each edge has a
weight that is proportional to the physical distance
between the two nodes. However, if there is an
obstacle between the nodes (landmarks) and/or its
unsafe to traverse this edge, the weight of the edge is
adjusted to a greater (infinite) value.
Stage 2: Generate navigation routes (shortest
paths) between source and destination landmarks
running Dijkstra's algorithm on the directed graph
generated in Stage 1. Obstacles will be avoided when
generating routes automatically since total weights of
the routes involving obstacles are higher than the rest.
Using the same logic, floor crossing preference, i.e.
starts, elevator, escalator, set by users can also be
accommodated by adjusting the weights of associated
links.
Stage 3: Generate navigation instructions using
the navigation routes generated in Stage 2. In
collaboration with Orientation and Mobility
instructors from Massachusetts Commission for the
Blind we developed the following vocabulary that is
used in the navigation instructions:
Orientation Adjustment Vocabulary
A. With the tag to your back
B. With the tag to your left/right side
C. Face the tag
D. With the (landmark) to your back
E. With the (landmark) to your left/right side
F. There is (landmark) to your certain
direction
Motion Vocabulary
A. Turn right
B. Turn left
C. Continue (Walk straight)
D. Cross (hallway)
E. Walk past (the opening)
F. Walk across (landmark) to your certain
direction
G. Go through (landmark)
H. Enter (landmark)
I. Reach (landmark) to your left/right side
J. Scan (NFC) tag to your left/right side
ICT4AWE 2017 - 3rd International Conference on Information and Communication Technologies for Ageing Well and e-Health
144
K. Press Prior/Next Instruction Button
L. Press End Journey Button
Travel-by Vocabulary
A. pass by obstacles or landmarks
B. hear certain sound/ smell in the route
passing by a certain landmark
C. trail/ follow certain texture (on your
left/right side)
D. keep certain landmark to the left/right side
Motion Stop Vocabulary
A. (Proceed) until reaching an intersecting
hallway
B. (Proceed) until reaching an intersecting
wall
C. (Proceed) until reaching an opening
D. (Proceed) until reaching a different texture
(metal gate)
E. (Proceed) until reaching a certain number
of doors/ openings/ recessed doorways
F. (Proceed) until passing a certain number of
firedoors
G. (Proceed) until reaching a certain landmark
H. (Proceed) until the wall angles out
Floor-cross Vocabulary
A. using elevator – press a certain button for
the destination floor
B. using stairs – go up/down certain number of
flights of stairs
An example of the navigation instructions is
provided in Section 4.
3 VALIDATION FRAMEWORK
In this section we introduce the navigation instruction
validation tool (NIVT). NIVT is a new approach to
automatically validate landmark-based navigation
instructions. It evaluates the navigation instructions
using a virtual reality environment by checking and
ensuring that each path in the virtual environment can
be traversed by following the corresponding
navigation instructions generated by the algorithm
introduced in the prior section.
NIVT was developed using Unity game engine
which is used to create a broad range of interactive
2D and 3D virtual environments which makes it an
ideal platform for virtualizing physical indoor
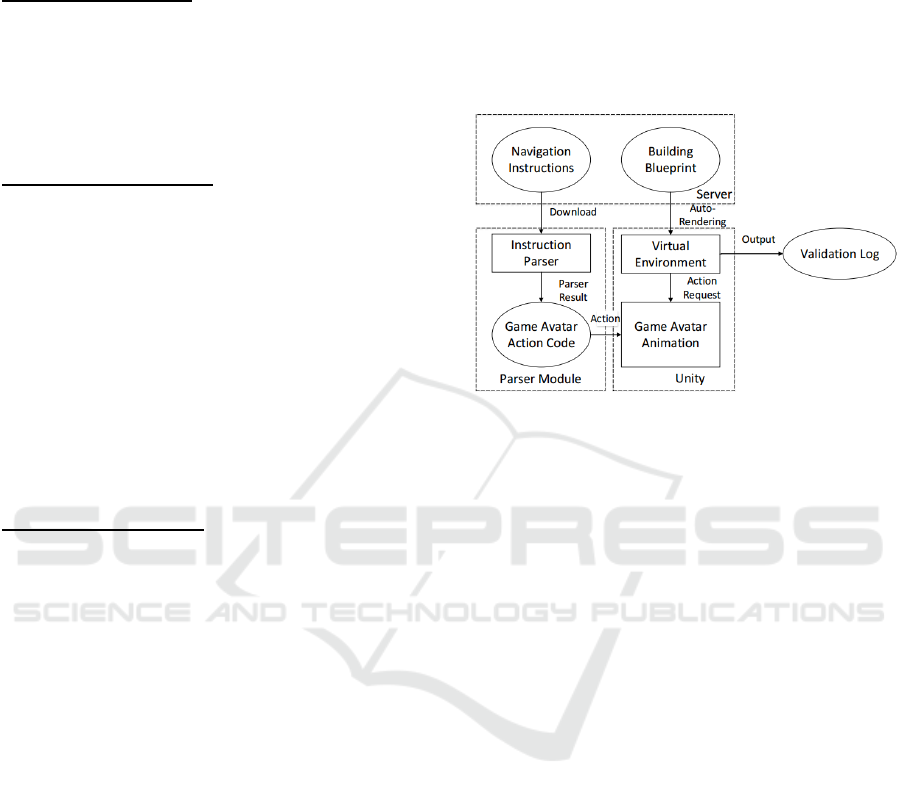
environments. NIVT includes three major parts (see
Figure 1): 1) a server database that includes the
navigation instructions generated by the algorithm
introduced in the previous section, 2) a virtual
environment that represents the physical space which
is traversed by the game avatar according to an action
code sequence (see Section 3.1) and 3) an instructions
parser which generates this action code sequence
from the navigation instructions (see Section 3.2).
We describe below the virtual environment, the
instruction parser and the testing process.
Figure 1: NIVT Architecture.
3.1 Virtual Environment
Using Unity game engine we generate the virtual
game environment that represents the indoor physical
environment floor plan. In this virtual environment,
“tags” are used as markers to indicate landmarks,
such as doors, elevators, stairs that are located in the
physical space. Textures of landmarks like wood or
metal are also rendered and represented in the virtual
environment. To build a virtual environment we
proceed as follows:
Step 1: Classify objects in target building’s CAD
file by their different features (like wall, stairs,
elevator, etc.), and save them in different layers;
Step 2: Utilize Microsoft .netDxf API (Microsoft
.netDxf, 2016), a third-party library to read and write
CAD file, to get 3D location of each objects in
different layers;
Step 3: Create corresponding game objects in
virtual reality environment with the exact same
location in real building’s blueprint with .netDxf
tool’s 3D location output;
Step 4: Add collider for each game objects and
mark them with different tag according to their
features;
Step 5: Download landmarks information from
the web browser, convert their geometry location into
Unity 3D location, and add landmarks in 3D world.
PERCEPT Indoor Wayfinding for Blind and Visually Impaired Users: Navigation Instructions Algorithm and Validation Framework
145
Figure 2 shows the floor plan of the UMass Campus
Center (22,500 sqft), and Figure 3 shows the
corresponding virtual game environment.
Figure 2: Campus Center Blueprint.
Figure 3: Campus Center Virtual Environment.
3.2 Parser Algorithm
The input to the parser are the instructions generated
by the algorithm. For each instruction the parser
generates executable action code sequence for the
game avatar.
The parser includes the following steps:
Step 1: Retrieve a navigation instruction for a
specific source-destination
Step 2: Split instruction sentences into different
types. There is a container in the background, which
divides all instruction sentences into different types
according to the similarity of instructions. Table 1
lists some instruction types.
Step 3: Once the system figures out which type of
instruction the current instruction is, it will extract the
keyword and determine the action code to execute.
These key words are crucial for the game avatar to
locate landmarks inside the virtual environment.
A detailed example of the parser is provided in
Section 4.
Table 1: Instruction Type and Animation.
Instruction
Type
Instruction
Sentence
Avatar Animation
Type 1 Turn right/
turn left
Turn right/
left
Type 2 Continue/
Walk straight
Continue/
Walk straight
Type 3 Trail the
keyword until
reach keyword
Ray cast from avatar
to find the nearest
landmark
Trail the certain
landmark to trigger
next node
Type 4 Walk
across/past
the keyword
Walk straight to
trigger next node
Type 5 With the
keyword to
your back/
left/right
Find closest node to
avatar
Turn avatar back/
left/right to it
Type 6 Walk to
keyword
direction
Ray cast from avatar
to find the landmark
at the provided
direction
Walk straight in that
direction to trigger
next node
Type 7 You have
reached your
destination
Finish current task
Trigger next task
3.3 Testing
For each source-destination pair (s,d), the instruction
parser translates the navigation instructions into an
action code sequence which is used by the game
avatar to traverse the virtual environment from source
s to destination d. If the avatar reaches destination d
following these actions, the navigation instructions
for (s,d) are correct. Otherwise, the navigation
instructions for (s,d) are marked as incorrect. After
the navigation instructions are validated for all
source-destination pairs we generate a validation log.
We used NIVT to validate all the navigation
instructions generated for at the University of
Massachusetts, Amherst, Campus Center Building.
ICT4AWE 2017 - 3rd International Conference on Information and Communication Technologies for Ageing Well and e-Health
146
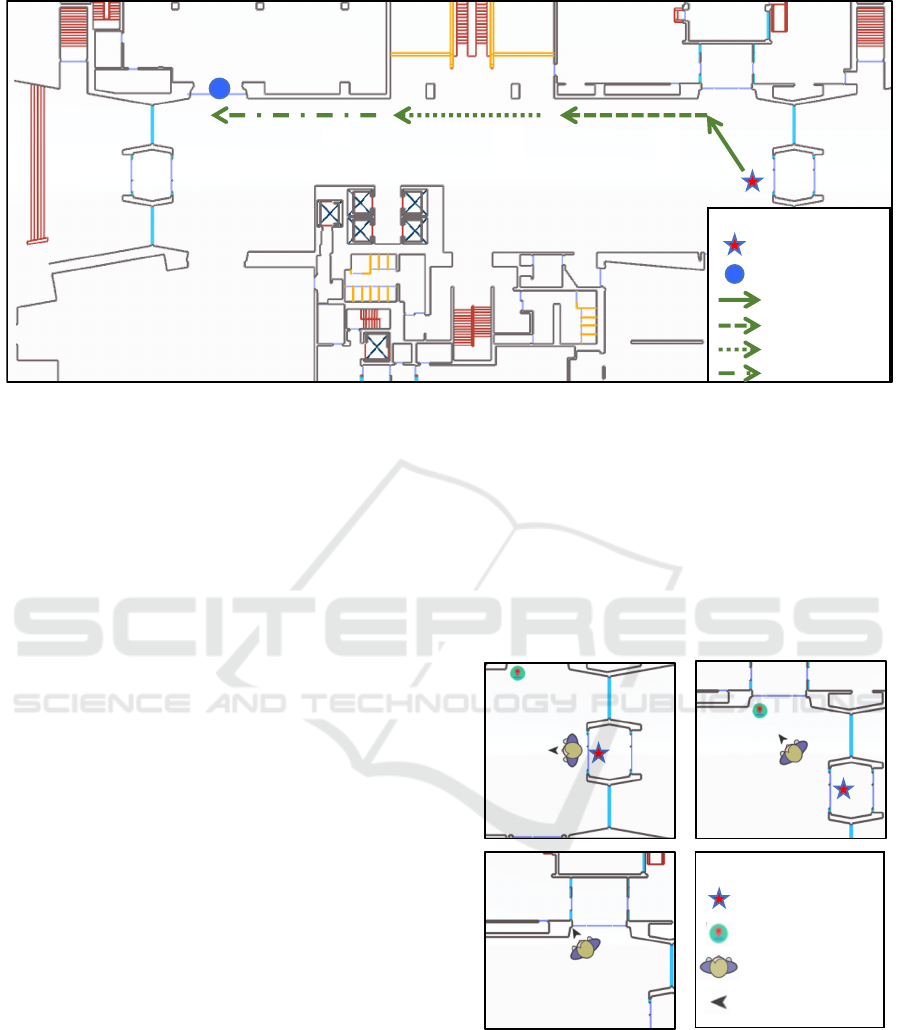
Figure 4: Campus Center Virtual Environment.
This is a two-story building with 66 landmarks and
1500 navigation instructions. NIVT has successfully
validated all instructions. We have intentionally
modified some of the instructions to render incorrect
instructions and they were all have been discovered
by NIVT. The test proves the validity of NIVT.
4 CASE STUDY
Now we will use an example to illustrate navigation
instructions, how they are parsed by the instruction
parser and how they are used by the game avatar to
traverse the virtual environment that represents
UMass Campus Center Building (See Figure 4). We
assume that the source is the East Entrance and the
destination is the UStore as marked in Figure 4. The
instructions are presented to the user in multiple
chunks of instructions. Next, we show step by step
how to the system generates and validates each
instructions chunk.
Step 1 (Chunk 1) – from East Entrance
(Source Point) to Harvest Market
Instructions chunk 1 generated by the navigation
algorithm: “Your current location is: East Entrance.
With the East Entrance to your back, there is Harvest
Market to your 2 o'clock direction, walk across to the
Harvest Market to your 2 o'clock direction, you will
reach: Harvest Market. Press next Instruction
Button.”
Action code generated by the instruction parser:
“back to East Entrance, walk to 2 o’clock, reach
Harvest Market”
The corresponding game avatar traversal is shown
in Figure 5. Following the action code, the game
avatar will go from East Entrance to Harvest Market
at 2 o’clock direction. Then the next chunk of
instructions is presented.
Figure 5: Step 1 Animation.
Step 2 (Chunk 2)– from Harvest Market to
opening
Instructions chunk 2 generated by the navigation
algorithm: “Continue, trail the wall on your right
side, until you reach an opening. Press next
Instruction Button”
234
East Entrance
UStore
Step 1
Step 2
Step 3
Step 4
Legend
1
234
Legend
Game Avat ar
Harvest Market
East En t ran ce
Body Orientation
Action Code 1
Back to East Entrance
Action Code 2
Walk to 2 o’clock
Action Code 3
Reach Harvest Market
PERCEPT Indoor Wayfinding for Blind and Visually Impaired Users: Navigation Instructions Algorithm and Validation Framework
147
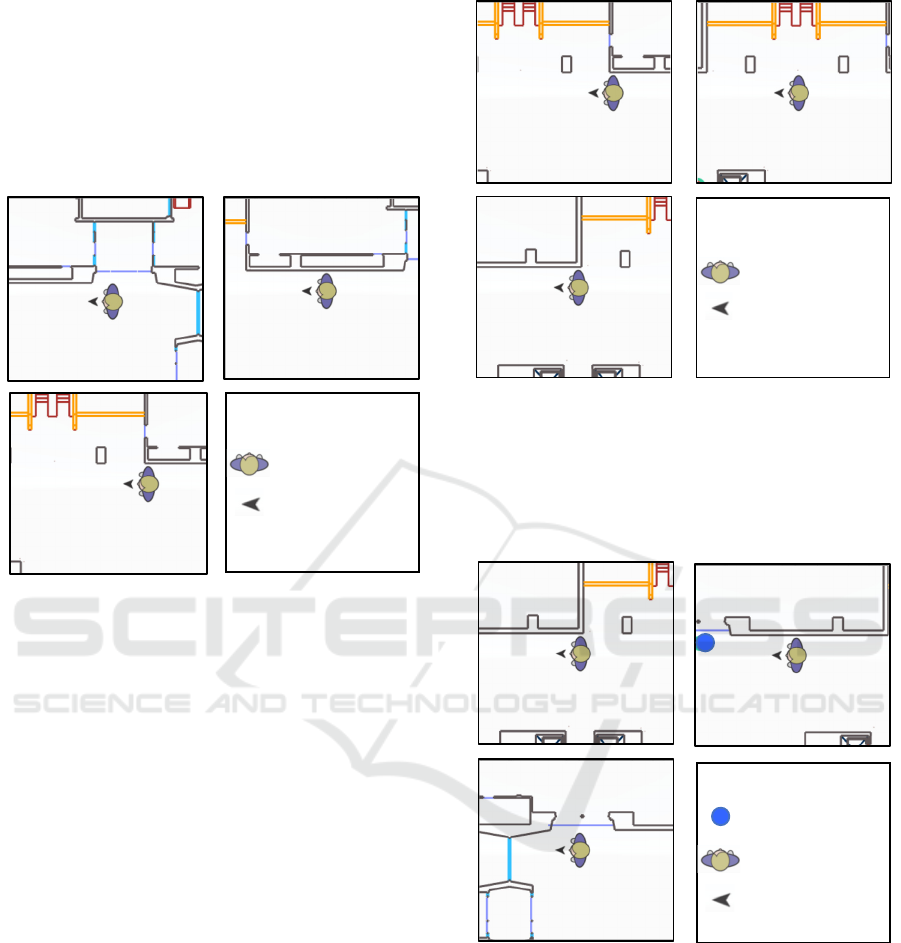
Action code generated by the instruction parser:
continue, trail right wall, reach opening
Game avatar traversal is shown in Figure 6.
Following the action code, the game avatar will go
from Harvest Market to an opening following the wall
on its right side. Then the next chunk of instructions
is presented.
Figure 6: Step 2 Animation.
Step 3 (Chunk 3) – walk past the opening
Instructions chunk 3 generated by the navigation
algorithm: “With the wall to your right, walk past the
opening. Press next instruction button”
Action code generated by the instruction parser:
right to wall, walk past opening, stop
Game avatar traversal is shown in Figure 7.
Following the action code, the game avatar will walk
past the opening and stop at that point. Then the next
instructions chunk is presented.
Step 4 (Chunk 4) – from opening to UStore
(Destination)
Instructions chunk 4 generated by the navigation
algorithm: “Continue, trail the wall on your right
side, until you reach the first door, you will reach:
UStore. Press finish button to end the journey.”
Action code generated by the instruction parser:
continue, trail right wall, reach door
Figure 7: Step 3 Animation.
Game avatar traversal is shown in Figure 8.
Following the action code, the game avatar will
continue walking and follow the wall on its right side
until it reaches a door. Then it will reach the
destination, which is UStore.
Figure 8: Step 4 Animation.
In this example we have shown that the game
avatar has successfully navigated from the source
(East Entrance) to the destination (UStore) following
the instructions. These navigation instructions from
the East Entrance to the UStore will be marked as
correct in the validation log.
Legend
Game Av atar
Body Orientation
Action Code 1
Continue
Action Code 2
Trai l ri g h t wal l
Action Code 3
Reach Opening
Le ge nd
Game Av atar
Body Orientation
Action Code 1
Right to wall
Action Co d e 2
Walk past opening
Action Code 3
Stop after opening
Legend
Game Av atar
Body Orientation
USto re
Action Code 1
Continue
Act i o n Code 2
Trai l ri gh t wal l
Action Code 3
Reach door
ICT4AWE 2017 - 3rd International Conference on Information and Communication Technologies for Ageing Well and e-Health
148

5 CONCLUSIONS
In this paper we introduced PERCEPT navigation
instruction generation algorithm and a validation
framework. We have tested the algorithm and
validated the instructions in a large building for which
we generated 1500 navigation instructions. The
results encourage us to proceed to our next research
agenda, which includes the development of tools that
will enable us to automate PERCEPT deployment and
testing in any indoor environment.
ACKNOWLEDGEMENTS
This project was supported in part by Grant 80424
from the Massachusetts Department of
Transportation. The content is solely the
responsibility of the authors and does not necessarily
represent the official views of the Massachusetts
Department of Transportation.
REFERENCES
Ahmetovic, D., Gleason, C., Ruan, C., Kitani, K., Takagi,
H., & Asakawa, C. (2016, September). NavCog: a
navigational cognitive assistant for the blind. In
Proceedings of the 18th International Conference on
Human-Computer Interaction with Mobile Devices and
Services (MobileHCI’16) (pp. 90-99). ACM.
American Fedration for the Blind. (2016). [Online].
Available at: http://www.afb.org/info/blindness-
statistics/adults/facts-and-figures/235/. [Accessed 19
Nov. 2016].
Basso, S., Frigo, G., & Giorgi, G. (2015, May). A
smartphone-based indoor localization system for
visually impaired people. In Medical Measurements
and Applications (MeMeA), 2015 IEEE International
Symposium on Medical Measurements and
Applications (pp. 543-548). IEEE.
Doush, I.A., Alshatnawi, S., Al-Tamimi, A.K., Alhasan, B.
and Hamasha, S. (2016, June). ISAB: Integrated Indoor
Navigation System for the Blind. Interacting with
Computers, (2017) 29 (2), (pp. 181-202).
Ganz, A., Schafer, J. M., Tao, Y., Wilson, C., & Robertson,
M. (2014, August). PERCEPT-II: Smartphone based
indoor navigation system for the blind. In 2014 36th
Annual International Conference of the IEEE
Engineering in Medicine and Biology Society (pp.
3662-3665). IEEE.
Idrees, A., Iqbal, Z., & Ishfaq, M. (2015, June). An efficient
indoor navigation technique to find optimal route for
blinds using QR codes. In 2015 IEEE 10th Conference
on Industrial Electronics and Applications (ICIEA) (pp.
690-695). IEEE.
Jonas, S.M., Sirazitdinova, E., Lensen, J., Kochanov, D.,
Mayzek, H., de Heus, T., Houben, R., Slijp, H. and
Deserno, T.M. (2015). IMAGO: Image-guided
navigation for visually impaired people. Journal of
Ambient Intelligence and Smart Environments, 7(5),
(pp.679-692).
Kim, J. E., Bessho, M., Kobayashi, S., Koshizuka, N., &
Sakamura, K. (2016, April). Navigating visually
impaired travelers in a large train station using
smartphone and bluetooth low energy. In Proceedings
of the 31st Annual ACM Symposium on Applied
Computing (pp. 604-611). ACM.
Microsoft .netDxf. (2016). [Online]. Available at:
https://netdxf.codeplex.com/. [Accessed 18 Feb. 2016].
Nakajima, M., & Haruyama, S. (2013). New indoor
navigation system for visually impaired people using
visible light communication. EURASIP Journal on
Wireless Communications and Networking, 2013(1),
(pp. 37).
Riehle, T. H., Anderson, S. M., Lichter, P. A., Whalen, W.
E., & Giudice, N. A. (2013, July). Indoor inertial
waypoint navigation for the blind. In 2013 35th Annual
International Conference of the IEEE Engineering in
Medicine and Biology Society (EMBC) (pp. 5187-
5190). IEEE.
Rituerto, A., Fusco, G., & Coughlan, J. M. (2016, October).
Towards a Sign-Based Indoor Navigation System for
People with Visual Impairments. In Proceedings of the
18th International ACM SIGACCESS Conference on
Computers and Accessibility (pp. 287-288). ACM.
Tao, Y. (2015). Scalable and Vision Free User Interface
Approaches for Indoor Navigation Systems for the
Visually Impaired.
Unity Technologies. (2016). [Online]. Available at:
https://unity3d.com/. [Accessed 19 Nov. 2016].
World Health Organization. (2016). [Online]. Available at:
http://www.who.int/mediacentre/factsheets/fs282/en/.
[Accessed 20 Nov. 2016].
PERCEPT Indoor Wayfinding for Blind and Visually Impaired Users: Navigation Instructions Algorithm and Validation Framework
149
