
Search based GUI Test Generation in Java
Comparing Code-based and EFG-based Optimization Goals
Mathias Menninghaus, Falk Wilke, Jan-Philipp Schleutker and Elke Pulverm
¨
uller
Institute of Computer Science, University of Osnabr
¨
uck, Wachsbleiche 27, 49090 Osnabr
¨
uck, Germany
Keywords:
GUI Testing, Test Generation, Test Automation, Search based Software Engineering, Genetic Algorithms.
Abstract:
Modern software systems often communicate with their users by graphical user interfaces (GUI). While the
underlying business logic may be fully covered by unit tests, the GUI mostly is not. Despite the widespread use
of capture and replay tools, which leave the test generation of GUI tests to the user, recent research also focuses
on automated GUI test generation. From the numerous approaches, which include symbolic execution, model-
based generation, and random testing, search based test data generation seems to be the most promising. In
this paper, we create GUI tests using hill climbing, simulated annealing and several genetic algorithms which
deal differently with the sequence length and use multi or single objective algorithms. These different test data
generators are compared in terms of runtime and coverage. All approaches are also compared using different
optimization goals which are a high coverage of the event flow graph (EFG) of the GUIs and a high coverage
of the underlying source code. The evaluation shows that the genetic algorithms outperform hill climbing and
simulated annealing in terms of coverage, and that targeting a high EFG coverage causes the best runtime
performance.
1 INTRODUCTION
Graphical user interfaces (GUI) are a common com-
ponent in todays software systems (Myers et al.,
2000). As they handle the human - computer inter-
action, their correct functionality is a crucial part to
fullfill the requirements and to guarantee the qual-
ity of a software system. The underlying code base
is only accessed indirectly by the interactions on the
GUI. Also, often a sequence of interactions is needed
to access certain functionalities in the software. For
instance, in order to open a file to be edited in a text
editor, one may need to open at least one dialog frame
to choose the correct file. A GUI and all decisions that
are possible through the lifetime of that GUI can be
displayed in an event flow graph (EFG). An event flow
graph consists of nodes, each representing an event on
a GUI component, and edges, one for each possible
action which leads from one event on a GUI compo-
nent, i.e. node in the EFG, to another. One criteria for
an appropriate GUI test is a high coverage on the over-
all software system and the challenge is to determine
such tests. With at least one loop in the EFG there are
an infinite number of possible paths through the GUI.
For instance, consider the example GUI as shown in
figure 1. The corresponding EFG is shown in figure 2
and already contains a loop, because the toggle button
is not dismissed after it has been clicked. Systemat-
ically running through all possible paths in an EFG
in order to find a minimal set of GUI tests would be
too much overhead to compute. Instead, in this paper
search based approaches (Harman et al., 2012a; Har-
man et al., 2012b) are used to create the desired test
sets.
click
toggle
Figure 1: A simple GUI to toggle the color of a panel.
event
on label
event
on button
Figure 2: Event flow graph (EFG), the different possible
events on the components (e.g. right and left mouse click)
already have been merged.
Menninghaus, M., Wilke, F., Schleutker, J-P. and Pulvermüller, E.
Search based GUI Test Generation in Java - Comparing Code-based and EFG-based Optimization Goals.
DOI: 10.5220/0006277801790186
In Proceedings of the 12th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2017), pages 179-186
ISBN: 978-989-758-250-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
179
2 RELATED WORK
Previous approaches on general automated test gen-
eration include symbolic execution (Khurshid et al.,
2004) which is used by the tools KLEE (Cadar et al.,
2008) and Barad (Ganov et al., 2008), random tests,
either directed and checked (Pacheco et al., 2007)
or unchecked and therefore often crashing (Csall-
ner and Smaragdakis, 2004) and model based ap-
proaches, which use different models such like activ-
ity diagrams (Vieira et al., 2006; Chen et al., 2009)
or the event flow graph (Memon, 2007; Yuan and
Memon, 2010). The latter approach is used in this
paper. Symbolic execution suffers from path ex-
plosions and random testing, even if directed, pro-
duces a lot of infeasible tests to be discarded. Search
based software testing (SBST) (McMinn, 2011) uses
metaheuristic search algorithms such as simulated an-
nealing, hill climbing and evolutionary algorithms to
systematically scan the search space. Search based
automated testing frameworks are CUTE (Sen and
Agha, 2006), DART (Godefroid et al., 2005), Test-
Ful (Baresi et al., 2010) and GAMDR (Aburas and
Groce, 2016). Search based testing is also success-
fully used to generate GUI tests (Carino, 2016). Static
approaches, such like GUITAR (Nguyen et al., 2014)
build the GUI model using a ripping procedure be-
fore generating the test cases. Dynamic approaches
build the model and generate the test cases dynami-
cally. EXYST (Gross et al., 2012) uses the experi-
ences made with EVOSUITE to generate small GUI
test sequences with a high code coverage. Pigdin
Crasher (Dan et al., 2014) is developed to find GUI
sequences which cause system crashes. Additionally
to the mentioned tools, (Soffa et al., 2001) focus on
coverage criteria for inter- and intra-component cov-
erage. (Yuan et al., 2011) extend that idea with cover-
ing arrays (Chee et al., 2013) to unfold faults more di-
rected by controlling the sequence length, the possible
positions of events and certain combination of events.
(Arcuri, 2012) investigate the best sequence length of
tests regarding to specific configurations. (Fraser and
Arcuri, 2011) stress the correct bloat control, with a
bloat being the disproportional quickly growth of the
length of test sequences. Different appraoches on in-
corporating the sequence length and bloat control are
discussed in section 5.1.
(Ingber and Rosen, 1992) and (Mitchell et al.,
1993) compare genetic algorithms with hill climbing
and simulated annealing and discuss when and how
genetic algorithms may outperform the latter. In this
paper, genetic algorithms are compared to simulated
annealing and hill climbing in terms of code coverage
for GUI tests.
Before presenting our approach, it should be
noted, that a test always has to be connected to a cor-
responding test oracle which defines when the out-
come of a test case is correct or not. In a recent survey,
(Barr et al., 2015) state that the generation of oracles
is still an open problem and “Much work on test or-
acles remains to be done”. In this paper, we focus
on the pure generation of GUI tests leaving the oracle
problem to the user for now.
3 GUItoolkit
This section roughly describes our GUItoolkit, it is
limited to the Java Swing framework and some other
limitations will also be described in this section.
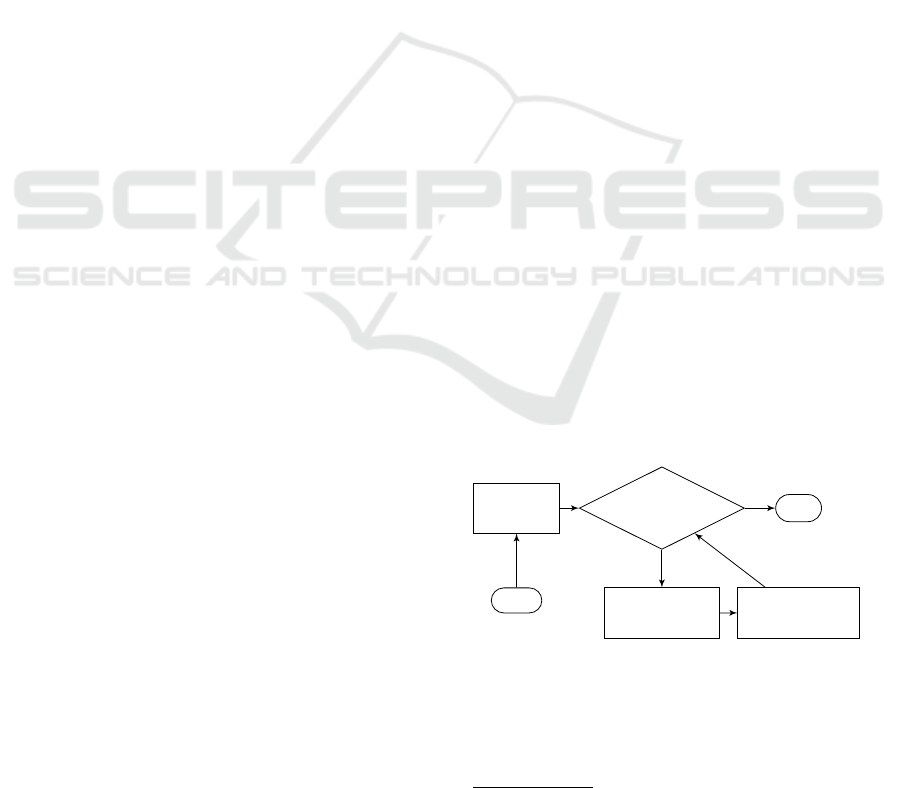
The generation of test sequences starts with the
detection phase in which all accessible GUI compo-
nents are detected and their representations are incor-
porated into an event flow graph. Its algorithm (Fig-
ure 3) uses AssertJ
1
to detect all active GUI compo-
nents and activates them one by one. For instance,
it clicks every visible button in a JFrame. Text in-
put is derived from a user defined file with appropri-
ate strings. If no specific file is invoked, GUItoolkit
uses a set of short dummy strings. More complex
text input generators may use a specific interface and
override the file input. After the initial detection of
all elements which are visible with the initialization
of the system under test (SUT), the detection is re-
peated over all new elements until no new elements
appear. At this point, the detection is limited to ele-
ments which are allocated to their parents when the
SUT is first invoked. It also expects only one JFrame
per SUT and only one pop-up window to be on screen
at once. In contrast to GUITAR (Nguyen et al., 2014)
the detection only stops when no new elements ap-
pear.
initial
detection
start
unused
elements?
end
activate
next element
detect
new elements
no
yes
Figure 3: Flow chart of the GUI detection algorithm.
With the detection all necessary information for
the following test generation is captured. This in-
cludes the components type, the optional text, all reg-
istered listeners in order to avoid unnecessary actions
1
http://joel-costigliola.github.io/assertj/
assertj-swing.html
ENASE 2017 - 12th International Conference on Evaluation of Novel Approaches to Software Engineering
180

and the optional precondition. In order to identify
the detected elements the path through the elements is
stored. After detection, the recorded structure of the
GUI is transferred into an EFG. The class files are in-
strumented in order to capture the coverage when the
generated test cases (Section 4) are executed. So far,
statement, branch and path coverage are supported.
During execution, also the coverage on the EFG is
recorded. The GUItoolkit is implemented in Java,
version 1.8.
4 SEARCH BASED GUI TEST
GENERATION
This section describes the test generation techniques
used by GUItoolkit. Generally, each of the test cases
consists of a sequence of GUI actions which may
each include a number of mouse and keyboard events.
Therefore, the atomic part of a test is one specific ac-
tion on a GUI which triggers one event on a compo-
nent.
4.1 Local Search Algorithms
Two local search algorithms are used to generate the
desired test data, hill climbing and simulated anneal-
ing (Russell et al., 2003). In contrast to (Korel, 1990),
which adapt hill climbing for unit test generation, the
original approach (Russell et al., 2003) is used. The
next state is simply the maximum of the neigbouring
states according to a user defined function h. The ma-
jor drawback of hill climbing is, that it may get stuck
in a local optimum.
In contrast to hill climbing, simulated annealing
uses an additional temperature function. It indicates
how far the search reaches out for an optimum. The
longer the algorithm runs, the colder the temperature
gets. The colder the temperature is, the more unlikely
it is for the algorithm to choose another state if the
current state is an optimum.
Both optimization algorithms choose one transi-
tion to the next state in every of their optimization
steps. The GUItoolkit employs two different types
of transitions. One for starting a new sequence of
GUI actions and one for adding a new GUI action
to an existing GUI action sequence. By incorporat-
ing the EFG into the decision, only valid actions are
choosen in order to be added to an existing or new
sequence. For the implementation of both heuristics
the AIMA3e-Java
2
framework is used and incorpo-
2
https://github.com/aimacode/aima-java
rated into GUItoolkit. Other heuristics from AIMA3e
could be easily incorporated in future work.
4.2 Genetic Algorithms
A genetic algorithm starts with an initial popula-
tion of solutions, or generation. The next genera-
tion is created by selecting a set of solutions from
the previous generation regarding to a fitness func-
tion. The solutions of every generation are then re-
combined (crossover) and also mutated. In terms of
GUI test generation one solution consists of a set of
action sequences, with each action representing one
event on a certain GUI component. For the selec-
tion of new generations binary tournament selection
is applied(Goldberg and Deb, 1991), which randomly
chooses two solutions and selects the better of the
two. Generally, a crossover takes a fraction of two
or more solutions and interchanges them. In more de-
tail, for GUI test generation single-point crossover is
used. That means, of two parents P
1
and P
2
one point
for both is chosen as an index to separate them. Ev-
erything in the first part of the first parent P
1
is then
combined with the second part of P
2
. Vice-versa the
first part of P
2
is combined with the second part of
P
1
. Thus, the action sequences of two solutions are
mixed up. A mutation operates on one solution and
alters it. Here, a mutation may be the insertion of a
new action inside a sequence, the deletion of an ac-
tion from an existing sequence, or both. Mutation is
also applied on the whole solution, i.e. new action
sequences are inserted or deleted. With every alter-
ation via crossover or mutation, the validity of the al-
tered sequences is checked. The change is discarded
if it causes an invalid action sequence. A genetic al-
gorithm terminates, if either a maximum number of
generations has been generated, a solution is found
that satisfies a minimal criteria, a fitness plateau is
reached, the allocated resources (e.g. time) are con-
sumed, or a combination of these criteria has reached
its defined limit.
As not only the achieved coverage on the code or
the EFG should be maximized, but also the sequence
length minimized, multi objective genetic algorithms
are used. In contrast to classic genetic algorithms,
multi-objective approaches (Zitzler et al., 2006) use
a vector to be minimized or maximized instead of a
single value. Along this simple definition a lot of
different approaches on genetic algorithms have been
proposed. For generating GUI tests only the NSGA-
II (Deb et al., 2000), PESA-II (Corne et al., 2001)
and SPEA-II (Laumanns et al., 2001) are considered,
as they represent a good fraction of the recent ap-
proaches on genetic algorithms. All three algorithms
Search based GUI Test Generation in Java - Comparing Code-based and EFG-based Optimization Goals
181
are implemented within the Multi Objective Evolu-
tionary Algorithm (MOEA) - Framework
3
which is
used by the GUItoolkit.
5 EVALUATION
This section describes the evaluation on the presented
GUItoolkit and the applied search based optimization
algorithms. Simulated annealing, hill climbing and
three genetic algorithms are compared. The main goal
of the algorithms is to achieve a maximized branch
coverage. Therefore two different optimization goals,
a high branch coverage in the code and a maximized
EFG coverage are compared.
5.1 Setup
The setup is derived from previous work (Section 2),
personal experience and in order to achieve a max-
imum coverage on the possible settings. The eval-
uation is performed on two example GUIs, a rather
simple and a complex one. Since mostly all configu-
rations cause a very high coverage on the simple GUI,
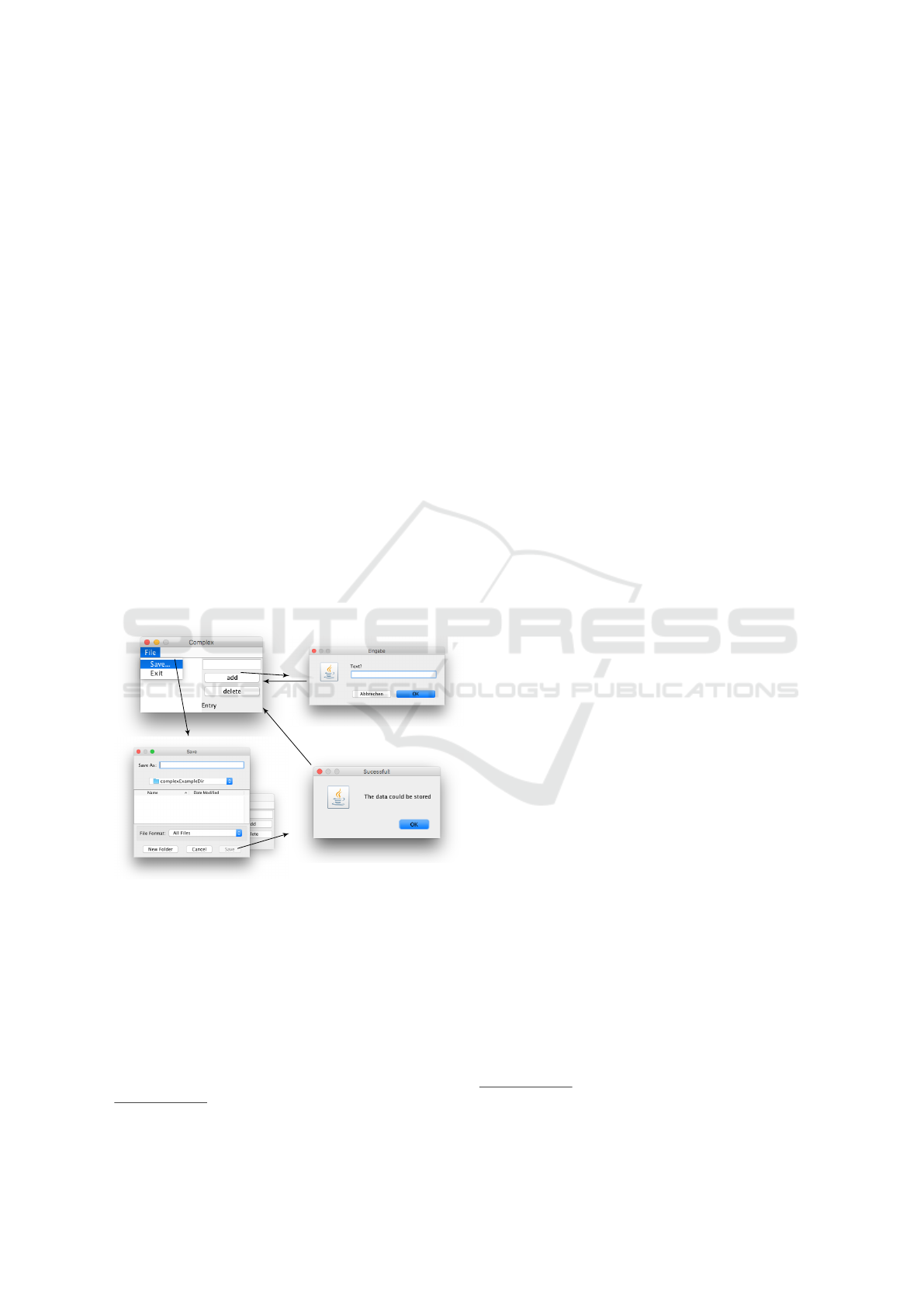
only the results for the more complex GUI, depicted
in Figure 4, are shown.
Figure 4: Excerpt from a more complex GUI, creating and
deleting entries in a list, and saving the list in a certain file.
The standard actions on the JFileChooser (bottom left) are
not shown.
5.1.1 Local Search Algorithms
In contrast to simulated annealing, the presented
approach on hill climbing is strictly deterministic.
Therefore, less evaluation runs are needed. As the
evaluation is very time consuming, the maximum
number of iterations is limited according to Table 1,
3
http://moeaframework.org
third column. Also, the maximum number of attempts
in using the same action in one sequence is limited
in order to avoid loops and local optima (fourth col-
umn). Taking bloat control into account (Fraser and
Arcuri, 2011), the maximum sequence length is also
limited according to the fifth column in Table 1. An
automated process may set the limitations after pre -
evaluating the EFG of a specific GUI.
5.1.2 Genetic Algorithms
Three different genetic algorithms (NSGA-II, SPEA-
II and PESA-II) are compared together with a random
search algorithm
4
. All of them use binary tourna-
ment selection, single point crossover on test sets, and
mutate test sets and action sequences by inserting or
deleting GUI actions from sequences and sequences
from test sets, respectively. For both, mutation and
crossover, a probability of 0.2 and 0.8 is investigated,
resulting in 4 different probability setups. The set-
tings of the genetic algorithms are set to the standard
values used in the MOEA framework. The branch
coverage of the underlying code and the coverage on
nodes in the EFG are used as fitness functions. Us-
ing the EFG coverage as fitness function only requires
one goal, whereas when using the branch coverage of
the code the overall coverage on the complete code,
the average coverage on the methods and the median
coverage on the methods is used. The average and
median coverage on methods are used in order to not
only cover the methods with a big control flow graph
but cover all methods equally. Initially, three se-
quences with three vertices each are created. The pop-
ulation size is set to 100 for EFG-based approaches,
and to 10 for code-based approaches. For EFG-based
approaches, the maximum number of evaluations is
set to 5000, and for code-based approaches to 150.
The selected values are set due to the corresponding
computation costs, as the branch coverage calculation
costs are higher than EFG coverage calculation costs.
The length is added to both types of fitness func-
tions to minimize it. In order to achieve a greater im-
pact of the length also every configuration is run by
not only using the length as additional objective, but
by using length categories. The fitness is set to 0.1
for lengths < 6, 0.2 for lengths < 12 and 0.3 other-
wise when using the EFG-based approach. For code-
based coverage the thresholds are set to 8 and 16, re-
spectively. As for the limitation on local search algo-
rithms, the length categories might be set after auto-
matically pre - evaluating the EFG.
In contrast to the multi objective approaches, the
4
http://moeaframework.org/javadoc/org/moeaframework
/algorithm/RandomSearch.html
ENASE 2017 - 12th International Conference on Evaluation of Novel Approaches to Software Engineering
182
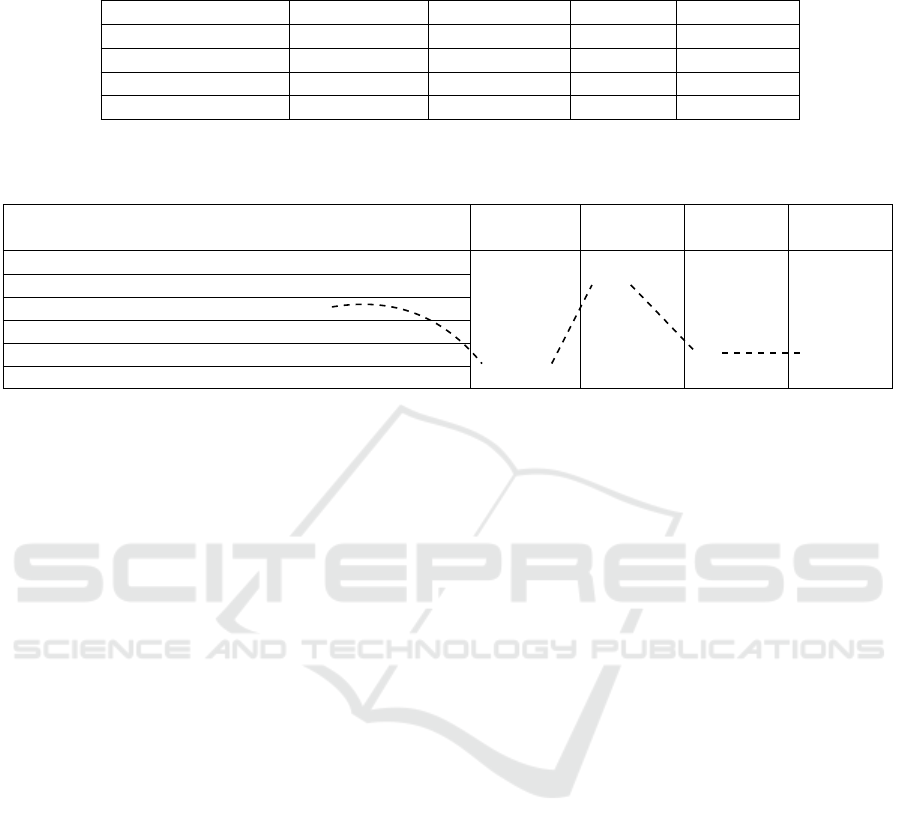
Table 1: Limitations for the generation of GUI tests with simulated annealing and hill climbing. Coverage is always meant to
be branch coverage on the given code.
Algorithm Coverage goal Max Iterations Max Tries Max Length
Hill climbing EFG 40 30 3
Simulated annealing EFG 8 5 3
Hill climbing code 40 30 3
Simulated annealing code 8 5 3
Table 2: Evaluation setups for genetic algorithms. The dashed path shows one example configuration choosing the multi
objective setup with coverage and minimized length as optimization goal using the PESA-II algorithm, the EFG as coverage
goal and a mutation and crossover rate of 0.8. The random setup is not depicted here.
Basic variant Algorithm Coverage
goal
Mutation
Rate
Crossover
Rate
A: no length
NSGA-II
EFG 0.2 0.2B: with minimized length
C: with minimized length in categories
SPEA-II
D: single additive objective
code 0.8 0.8E: single additive objective with normalized length
PESA-II
F: single objective
genetic algorithms are also computed with two other
types of optimization criteria. First, the multiple ob-
jectives are transferred into a single additive objec-
tive, meaning that all objectives are weighted and
summed up to a single objective. For the EFG-based
approaches, the coverage is weighted with 0.9 and the
length is weighted with 0.1. For the code-based ap-
proaches the three coverage types are weighted with
0.3 each and the length is weighted with 0.1. As the
results are not promising, the length is also normal-
ized with the maximum length, in order to be com-
parable to the coverage which always lies within the
range [0, 1]. Second, only one objective is used. For
the EFG-based approaches only the node coverage on
the EFG is used and for the code-based approaches
only the overall coverage is used.
Summing up, six basic variants are created, each
of them is computed with all three genetic algorithms
plus the random approaches and each of them is
computetd with four different probability setups and
two different major optimization goals, EFG-based
or code based. An overview of all variants for the
genetic algorithms is given in Table 2, resulting in
6 × 3 × 2 × 2 × 2 = 144 variants. Note, that every
basic variant is also computed using each coverage
goal with the random algorithm, thus adding another
6 × 2 = 12 variants.
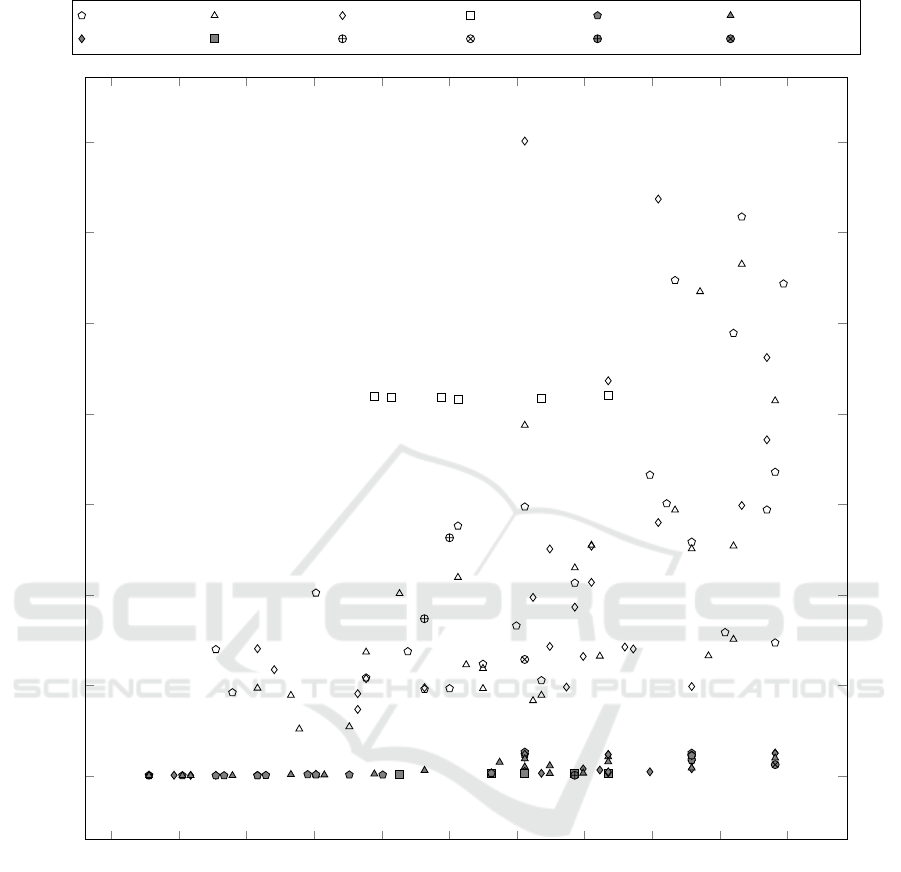
5.2 Results
The results are presented in the scatter plot in Fig-
ure 5. Using the coverage on the EFG as optimiza-
tion goal instead of the code improves the runtime.
All EFG-based computations have a smaller runtime
than any code-based computations. Speaking of ge-
netic algorithms, variants A, F and E, i.e. the vari-
ants not minimizing the length, using a single addi-
tive objective with normalized length and using only
a single objective, perform best in terms of coverage.
Variant A has the highest average coverage for the
code based approaches (0.65), whereas variant F has
the highest average coverage for the EFG-based ap-
proaches (0.64). A also shows the best performance
for both approaches (0.7469 code-based and 0.7407
EFG-based), with the best results from F being only
slightly worse (0.7407 code-based and 0.7407 EFG-
based). Variant F also produces the best test set in
terms of runtime, even when achieving higher cover-
age (see lower right of Figure 5). The simple hill-
climbing approach is able to compete with variant F,
but only for the EFG-based approaches. The perfor-
mance of the three different genetic algorithms can
not be divided as clearly as the performance of the dif-
ferent variants. Because of the high diversity within
and between the different genetic algorithms, none
performs significantly better or worse than the oth-
ers. Also, mutation and crossover rate show either
best and worse performances in every configuration.
The distinction between overall, average and median
coverage as optimization goal only shows an isolated
effect on the generated approaches. Summing up, us-
ing the EFG as optimization goal may not lead to a
smaller coverage on the overall code and always per-
forms better in terms of runtime. Additionally, local
search algorithms are able to compete against genetic
algorithms in terms of coverage and runtime, and the
genetic algorithms perform best when using a single
objective.
Search based GUI Test Generation in Java - Comparing Code-based and EFG-based Optimization Goals
183
0.25
0.3
0.35
0.4
0.45 0.5 0.55 0.6 0.65
0.7
0.75
0
1,000
2,000
3,000
4,000
5,000
6,000
7,000
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
E
E
E
E
E
E
E
E
E
E
E
E
E
E
E
E
E
E
E
E
E
E
E
E
E
E
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
F
average overall coverage on code [-]
average runtime [s]
NSGA-II (code) PESA-II (code) SPEA-II (code) Random (code) NSGA-II (EFG) PESA-II (EFG)
SPEA-II (EFG) Random (EFG) SA (code) HC (code) SA (EFG) HC (EFG)
Figure 5: Scatter plot of the average overall code coverage and average runtime on every configuration. EFG-based approaches
are filled in gray, code-based approaches are not filled. The variants are identified with respect to Table 2.
6 CONCLUSION AND OUTLOOK
In this paper, we investigated the automatic genera-
tion of test cases for graphical user interfaces. The lit-
erature review emphasized the usage of search-based
techniques to create GUI tests which have a good
coverage of the underlying code base. We used hill-
climbing, simulated annealing and several genetic al-
gorithms to produce the GUI tests. Instead of using
the EFG only as model for the test generation, the
coverage of the EFG was also used as optimization
goal. After a detailed evaluation, it seems that the ge-
netic algorithms using only a single objective perform
best in terms of runtime and coverage. Moreover, hill
climbing was able to compete with these approaches.
Using the EFG coverage as optimization goal leads
to a coverage of the underlying code base which is
equal to the coverage generated with the coverage of
the code as optimization goal. Additionally, the EFG-
based approaches have a much smaller runtime.
For the future, the employment of the EFG cover-
ENASE 2017 - 12th International Conference on Evaluation of Novel Approaches to Software Engineering
184

age as optimization goal has to be studied further. The
evaluation presented in this paper has to be performed
on more and especially more complex GUIs. There-
fore, the presented test generation framework, GUI-
toolkit, has to be optimized. It also may be beneficial
to incorporate GUITAR for future projects with the
presented algorithms and their configurations. The
generated test cases may also be used for fair per-
formance tests which depend on highly covering test
cases (Menninghaus and Pulverm
¨
uller, 2016).
REFERENCES
Aburas, A. and Groce, A. (2016). A Method Dependence
Relations Guided Genetic Algorithm. In International
Symposium on Search Based Software Engineering,
pages 267–273. Springer International Publishing.
Arcuri, A. (2012). A Theoretical and Empirical Analysis of
the Role of Test Sequence Length in Software Testing
for Structural Coverage. IEEE Transactions on Soft-
ware Engineering, 38(3):497–519.
Baresi, L., Lanzi, P. L., and Miraz, M. (2010). TestFul: An
Evolutionary Test Approach for Java. In Third Inter-
national Conference on Software Testing, Verification
and Validation, pages 185–194. IEEE.
Barr, E. T., Harman, M., McMinn, P., Shahbaz, M., and
Yoo, S. (2015). The Oracle Problem in Software Test-
ing: A Survey. IEEE Transactions on Software Engi-
neering, 41(5):507–525.
Cadar, C., Dunbar, D., and Engler, D. R. (2008).
KLEE: Unassisted and Automatic Generation of
High-Coverage Tests for Complex Systems Programs.
In 8th USENIX conference on Operating systems,
pages 209–224.
Carino, S. (2016). Dynamically Testing Graphical User In-
terfaces. PhD thesis.
Chee, Y. M., Colbourn, C. J., Horsley, D., and Zhou, J.
(2013). Sequence Covering Arrays. SIAM Journal
on Discrete Mathematics, 27(4):1844–1861.
Chen, M., Qiu, X., Xu, W., Wang, L., Zhao, J., and Li,
X. (2009). UML Activity Diagram-Based Automatic
Test Case Generation For Java Programs. The Com-
puter Journal, 52(5):545–556.
Corne, D. W., Jerram, N. R., Knowles, J. D., Oates, M. J.,
and J, M. (2001). PESA-II: Region-based Selection
in Evolutionary Multiobjective Optimization. In Pro-
ceedings of the genetic and evolutionary computation
conference.
Csallner, C. and Smaragdakis, Y. (2004). JCrasher: an au-
tomatic robustness tester for Java. Software: Practice
and Experience, 34(11):1025–1050.
Dan, H., Harman, M., Krinke, J., Li, L., and Marginean,
A. (2014). Pidgin crasher: searching for minimised
crashing GUI event sequences. SSBSE 2014 - Sympo-
sium on Search -Based Software Engineering.
Deb, K., Agrawal, S., Pratap, A., and Meyarivan, T. (2000).
A Fast Elitist Non-dominated Sorting Genetic Algo-
rithm for Multi-objective Optimization: NSGA-II. In
International Conference on Parallel Problem Solving
From Nature, pages 849–858. Springer Berlin Heidel-
berg.
Fraser, G. and Arcuri, A. (2011). It is Not the Length That
Matters, It is How You Control It. In 2011 IEEE
Fourth International Conference on Software Testing,
Verification and Validation (ICST), pages 150–159.
IEEE.
Ganov, S. R., Killmar, C., Khurshid, S., and Perry, D. E.
(2008). Test generation for graphical user interfaces
based on symbolic execution. In Proceedings of the
3rd international workshop on Automation of software
test, pages 33–40. ACM.
Godefroid, P., Klarlund, N., and Sen, K. (2005). DART:
directed automated random testing. ACM SIGPLAN
Notices, 40(6):213–223.
Goldberg, D. E. and Deb, K. (1991). A Comparative Analy-
sis of Selection Schemes Used in Genetic Algorithms.
Foundations of Genetic Algorithms, pages 69–93.
Gross, F., Fraser, G., and Zeller, A. (2012). EXSYST:
search-based GUI testing. In ICSE Proceedings of
th International Conference on Software Engineering,
pages 1423–1426. IEEE Press.
Harman, M., Mansouri, S. A., and Zhang, Y. (2012a).
Search-based software engineering: Trends, tech-
niques and applications. ACM Computing Surveys
(CSUR), 45(1).
Harman, M., McMinn, P., de Souza, J. T., and Yoo, S.
(2012b). Search Based Software Engineering: Tech-
niques, Taxonomy, Tutorial. In Empirical Software
Engineering and Verification, pages 1–59. Springer
Berlin Heidelberg.
Ingber, L. and Rosen, B. (1992). Genetic Algorithms
and Very Fast Simulated Reannealing: A comparison.
Mathematical and computer modelling, 16(11):87–
100.
Khurshid, S., Visser, W., P
˘
as
˘
areanu, C. S., and Khur-
shid, S. (2004). Test input generation with java
PathFinder. ACM SIGSOFT Software Engineering
Notes, 29(4):97–107.
Korel, B. (1990). Automated software test data genera-
tion. IEEE Transactions on Software Engineering,
16(8):870–879.
Laumanns, M., Thiele, L., and Zitzler, E. (2001). SPEA2:
Improving the strength Pareto evolutionary algorithm.
Eurogen, 3242(103):95–100.
McMinn, P. (2011). Search-Based Software Testing: Past,
Present and Future. In 2011 IEEE Fourth Interna-
tional Conference on Software Testing, Verification
and Validation Workshops (ICSTW), pages 153–163.
IEEE.
Memon, A. M. (2007). An event-flow model of GUI-based
applications for testing. Software Testing, Verification
and Reliability, 17:137–157.
Menninghaus, M. and Pulverm
¨
uller, E. (2016). Towards
Using Code Coverage Metrics for Performance Com-
parison on the Implementation Level. In the 7th
ACM/SPEC, pages 101–104. ACM.
Mitchell, M., Holland, J. H., and Forrest, S. (1993). When
will a genetic algorithm outperform hill climbing?
Ann Arbor.
Search based GUI Test Generation in Java - Comparing Code-based and EFG-based Optimization Goals
185

Myers, B., Hudson, S. E., and Pausch, R. (2000). Past,
present, and future of user interface software tools.
ACM Transactions on Computer-Human Interaction
(TOCHI), 7(1):3–28.
Nguyen, B. N., Robbins, B., Banerjee, I., and Memon, A.
(2014). GUITAR: an innovative tool for automated
testing of GUI-driven software. Automated Software
Engineering, 21(1):65–105.
Pacheco, C., Lahiri, S. K., and Ernst, M. D. (2007).
Feedback-directed random test generation. In Pro-
ceedings of the 29th International Conference on Soft-
ware Engineering.
Russell, S. J., Norvig, P., Canny, J. F., Malik, J. M., and
Edwards, D. D. (2003). Artificial intelligence: a mod-
ern approach, volume 2. Prentice hall Upper Saddle
River.
Sen, K. and Agha, G. (2006). CUTE and jCUTE: Concolic
Unit Testing and Explicit Path Model-Checking Tools.
In International Conference on Computer Aided Veri-
fication, pages 419–423. Springer Berlin Heidelberg.
Soffa, M. L., Pollack, M. E., and Memon, A. M. (2001).
Coverage criteria for GUI testing. ACM SIGSOFT
Software Engineering Notes, 26(5):256–267.
Vieira, M., Leduc, J., Hasling, B., Subramanyan, R., and
Kazmeier, J. (2006). Automation of GUI testing us-
ing a model-driven approach. In Proceedings of the
2006 international workshop on Automation of soft-
ware test, pages 9–14. ACM.
Yuan, X., Cohen, M. B., and Memon, A. M. (2011). GUI
interaction testing: Incorporating event context. IEEE
Transactions on Software Engineering, 97(4):559–
574.
Yuan, X. and Memon, A. M. (2010). Generating Event
Sequence-Based Test Cases Using GUI Runtime State
Feedback. IEEE Transactions on Software Engineer-
ing, 36(1):81–95.
Zitzler, E., Deb, K., and Thiele, L. (2006). Comparison
of Multiobjective Evolutionary Algorithms: Empiri-
cal Results. Evolutionary computation, 8(2):173–195.
ENASE 2017 - 12th International Conference on Evaluation of Novel Approaches to Software Engineering
186
