
A Virtual Reality based Engine Training System
A Prototype Development & Evaluation
Tami Im, Deukyoung An,
Oh-Young Kwon and Sang-Youn Kim
Online Lifelong Education Institute, Korea University of Education and Technology, Cheon-An, Korea
Keywords: Virtual Training, Vocational Training, Engineering Education, Engagement, Immersion.
Abstract: A Virtual Reality based Engine Training System (VRETS) was developed and tested in this study. This
training system was developed to use a head mounted display and a motion detector to pursue realistic engine
dissembling and assembling training with natural interaction. 26 college students participated in the user test
of this training system. The results of the user test show high interest, immersion, satisfaction, and perceived
learning effectiveness of VRETS. Participants also reported that they could easily and naturally operate
VRETS, and they also had full control of the content.
1 INTRODUCTION
Needs of interactive training system has been
increased to enhance students’ motivation and
training effectiveness. Students tend to deeply
participate and join training which offers chances of
interaction and direct feedback with various
modalities (Clark and Mayer, 2011). Engaging
students to the training is one of important issues
which is one of key indicators of students’
achievements (Ibanez et al., 2014; Freitas, 2006).
Learning by doing is particularly emphasized in
vocational training due to the importance on transfer
of learning. Main purpose of vocational training is to
improve trainees’ performance as a result of the
training. Thus, designing and developing training
environment which is close to real-world and high-
relevance tasks is critical for the success of vocational
training.
Based on this background, new types of vocational
training method have been suggested recently. Virtual
reality is one of useful technology for training which
allows safe training environment, immediate
feedback, and repetition without limitation with
anytime/anywhere benefits (Bozgeyikli et al., 2016).
2 RELATED WORK
2.1 Virtual Reality Platform
At the early stage of virtual reality technology, big
scale virtual reality platforms such as CAVE and
multi-channel display were used for training. These
platforms were for educating big group of people in a
room setting.
Along with the rapid growth of virtual reality
technology, small-sized virtual reality devices such as
HMD (Head Mounted Display) and Leap Motion are
mostly preferred in virtual training. HMD and Leap
Motion are useful for individualized, immersive, and
interactive training.
HMD has increasingly applied to training systems
due to its high immersion, real-time interaction and
wide applications (Peden et al., 2016). The size and
cost of HMD is becoming more and more reasonable,
it is getting popular device for training purpose. Leap
Motion is a marker-less motion capture device
tracking hand, wrist and forearm position
(Smeragliuolo et al., 2016). One benefit of Leap
Motion is low cost that makes it possible to use for
training purpose as well.
2.2 Virtual Reality based Training
Virtual reality has been applied as an effective
training tool in the area of flight simulation, special
education, laparoscopic surgery and rehabilitation
262
Im, T., An, D., Kwon, O-Y. and Kim, S-Y.
A Virtual Reality based Engine Training System - A Prototype Development & Evaluation.
DOI: 10.5220/0006263702620267
In Proceedings of the 9th International Conference on Computer Supported Education (CSEDU 2017) - Volume 1, pages 262-267
ISBN: 978-989-758-239-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
training. Ke and Im (2013) developed a virtual reality
based social interaction training simulation for high
functioning ASD children using SecondLife and
found positive effects on performance of responding,
initiation, greeting, positive conservation ending and
social competence. Bozgeyikli et al. (2016) explored
different types of locomotion techniques with ASD
individuals and figured out they felt comfortable with
joystick and point & teleport techniques. A virtual
reality dance training system using motion capture
technology was proposed by Chan et al. (2011) and
positive effects on improving students’ dancing skill
as well as increasing motivation was found from the
study. A meta-analysis research was conducted with
virtual reality training in laparoscopic surgery and it
was found that virtual reality simulation is
significantly effective than video trainers (Alakeret
al., 2016). Researchers concluded that using
Proficiency-based virtual reality training with
supervision accompanied by prompt instruction and
feedback, and haptic feedback would be the most
effective way of virtual reality training.
However, there are still limited number of virtual
reality based training exits in the area of technical
training and most of them are development case study
focusing on technical elements with no user test or
evaluation. For example, Choi et al. (2015) developed
a virtual reality based operation system for steel
making process and presented the structure and
elements of the system. In this study, a virtual reality
based engine training system was suggested along
with results of a detailed user test.
3 VIRTUAL REALITY BASED
ENGINE TRAINING SYSTEM
(VRETS)
3.1 System Architecture
We implemented a virtual reality based engine
training system (VRETS) which empowers users to
see and to manipulate virtual objects. The VRETS
was configured to allow two or more users into a
single private lesson from any location. The proposed
VRETS consists of a natural interaction module, a
head mounted display (HMD), and a virtual reality
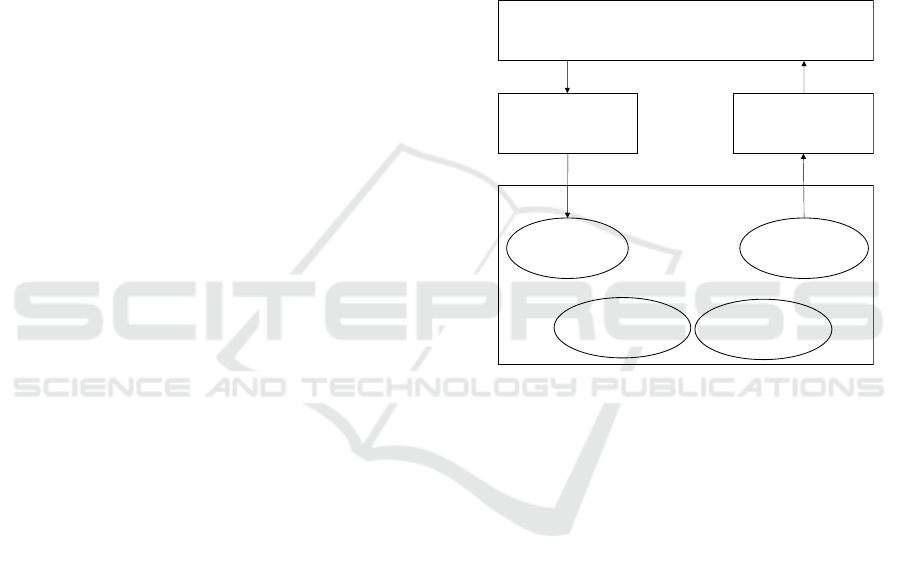
server as shown in Figure 1. In this system, the natural
interaction module plays a role of sensing a trajectory
of a human hand. When a user moves his/her hands,
the natural interaction module captures the motion in
real time and conveys the motion to the virtual reality
server. There are four major parts in the virtual reality
server. A motion recognizing part computes and
understands the trajectory of a user’s hands. Based on
the computed trajectory, a transformation part
calculates the position of a user’s hands in the
absolute coordinate which uses X, Y, and Z axis to
establish a point in a common origin. In the absolute
coordinate, a collision detection part computes the
collision between a user’s hand and a target virtual
object, and furthermore it calculates new positions of
the target object in virtual environment. Finally, all
virtual objects are redrawn in the new positions by a
graphic rendering part and then are displayed on the
head mounted display (HMD).
Figure 1: System structure of the proposed training system.
3.2 Interactive Virtual Reality
Contents
The most important thing in constructing virtual
training systems is to minimize a gap between virtual
and real worlds. The minimization of the gap can be
achieved by creating realistic virtual world (virtual
environment) with high quality images. Virtual
environment was constructed using a PC with 3.4
GHz i7 processors. A sleek head mounted display
(Oculus Rift) was used for allowing users to see and
enjoy computer generated virtual objects. All virtual
objects were modelled with 3DMax and the model
was subsequently simplified by a triangulated surface
mesh simplification method (Algorri and Schmitt,
1996) for achieving real-time rendering on our PC.
After that, we prepared two-dimensional image file to
be applied to the surface of the model. The prepared
image (texture) is mapped onto a target object’s
surface in 3D space. The model was then shaded
using C# with unity 3D as a graphic engine and
rendered at about 30 frames/sec (Figure 2).
User
Natural
Interaction
Module
HMD
Virtual Reality Server
Motion
Recognizing
Part
Graphic
Rendering
Part
Transformation
Part
Collision
Detection Part
A Virtual Reality based Engine Training System - A Prototype Development & Evaluation
263
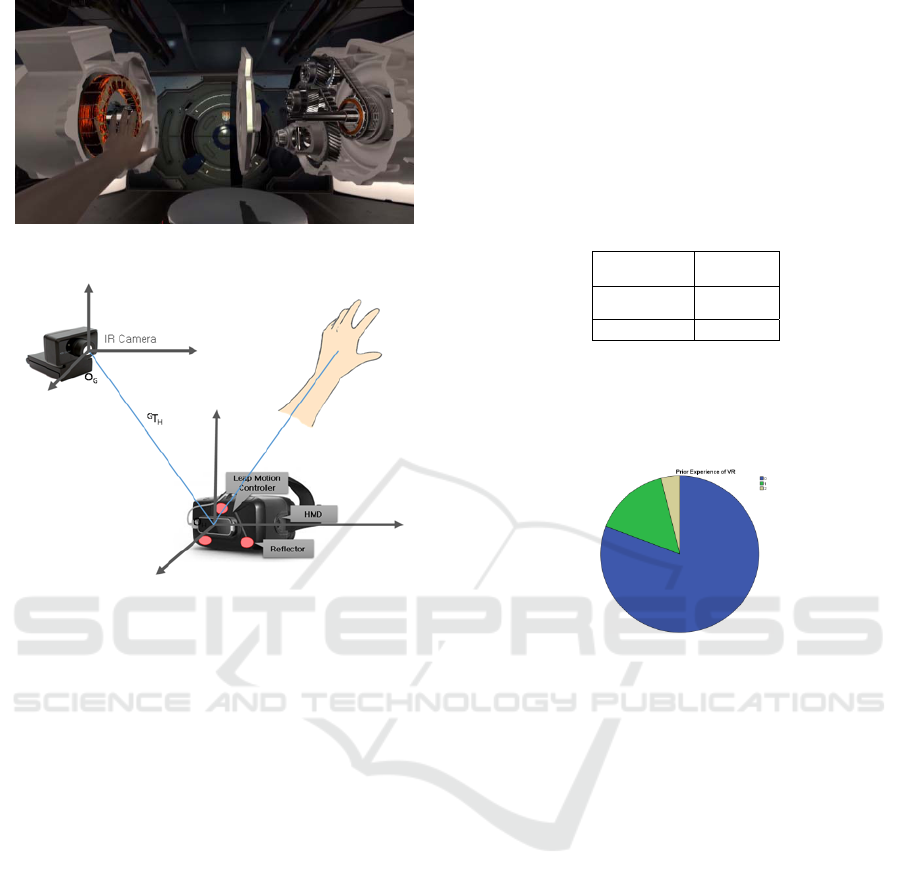
Figure 2: Constructed virtual environment.
Figure 3: Coordinate frame of the proposed system.
Although high quality images are essential to provide
a better sense of reality to users, it is not easy to
increase the degree of the users’ immersion to the
level users truly want. A promising way of improving
upon this problem is to construct a natural interaction
module which allows a user to intuitively manipulate
virtual objects with his/her gesture or motion. We
constructed a natural interaction module that captures
a user’s motion as shown in Figure 3. The natural
interaction module is made with an infrared (IR)
camera, a commercial motion detector (Leap motion
controller), and three IR reflectors. We applied a
coordinate frame on the IR camera. This coordinate
frame is used as the reference frame. The IR camera
captures three IR detectors which are attached to the
HMD to measure a user’s head motion. The
commercial motion detector was attached to the
HMD to track a user’s hand in real time. Therefore, a
user can watch and enjoy every parts of virtual world
by turning his/her head and can manipulate the parts
with his/her hands as if he/she interacts with objects
in real world. VRETS provides feedback with sound
based on the results of success or failure of each
mission.
4 EVALUATION & RESULTS
4.1 Participants
26 college students were recruited for the user test.
Average age of participants was 23 years old ranging
from 20~27. There were 15 male students and 11
female participants (Table 1).
Table 1: Gender.
Male 15
Female 11
Total 26
Majority of participants have majors in engineering
department. 5 students have prior experience of
Virtual Reality Applications and 21 students have
never tried VR related application before (Figure 4).
Figure 4: Participants’ Prior experience of VR.
4.2 User Test
The purpose of user test for this study was to explore
how people think, feel, react toward VRETS. For this
user test, participants came to a virtual reality lab at
KOREATECH one by one. Two of researchers led
user test and observed participants’ interaction with
the content. Before starting user test, one of
researcher clearly explained the purpose and the
procedure of test to each participant. A brief guide
about how to manipulate the virtual engine training
system was provided. Once a brief introduction of the
test was over, participants put on Oculus Rift with
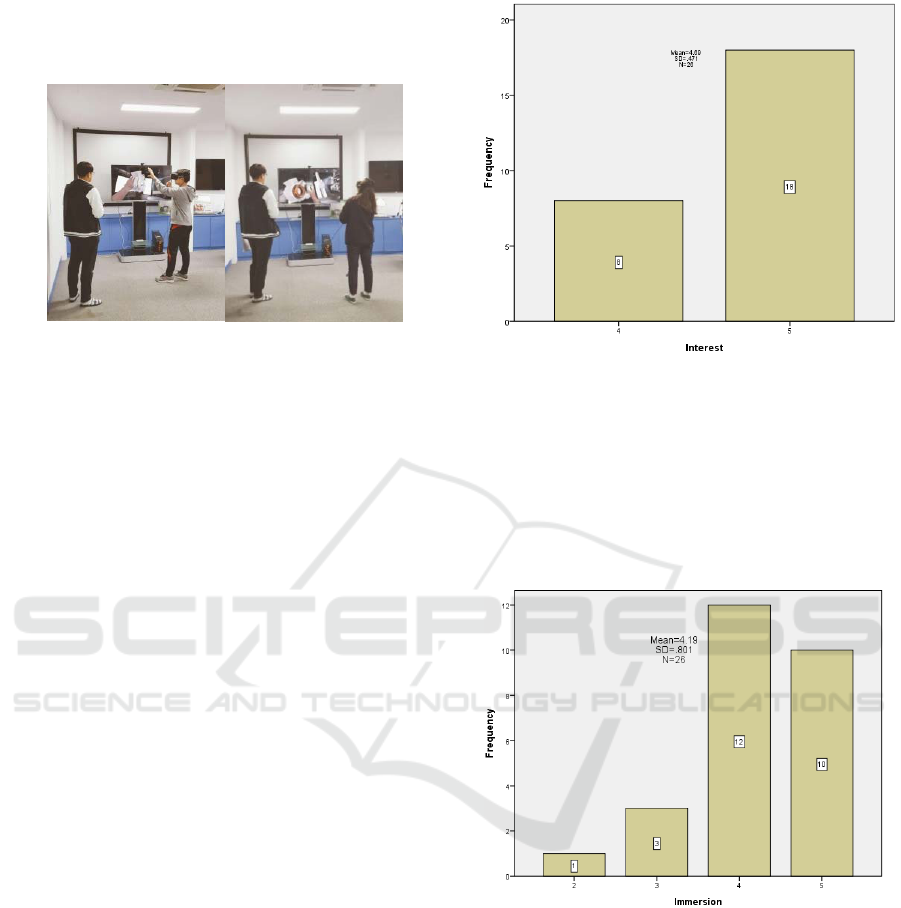
Leap Motion and tried the VRETS (Figure 5).
Participants should disassemble an engine within the
virtual training system and reassemble it by
themselves. They could ask help to researchers if they
need.
The aspects of user experience that were explored
in this study are listed as below.
Arousing Interest
Immersion
Interaction
Ease of Operation
CSEDU 2017 - 9th International Conference on Computer Supported Education
264
Locus of Control
Perceived Learning Effectiveness
Satisfaction
Figure 5: Scenes from User Test.
4.3 Materials
A questionnaire was modified for this study based on
prior research studies regarding user experience,
game evaluation and motion sickness with a 5-point
Likert scale. Participants filled out the questionnaire
once completing their mission with VRETS.
4.4 Results
4.4.1 Interest
The mean score of participants’ interest to VRETS is
4.69 and the standard deviation is .471 (Figure 6). 70%
of participants answered that VRETS was very
interesting to them.
Many participants responded that they were
interested in VRETS due to the high reality of the
system. This is from participants’ comment related to
interest.
“It was very interesting to me because VRETS
looks very real to me. It looks almost like a real
engine.”
Some participants found similarity between
VRETS and games.
“Even though this was first time to see engine
system, I enjoyed VRETS and thought it very
interesting since I could work on this content like
playing a game.”
4.4.2 Immersion
The mean score of participants’ immersion to VRETS
is 4.19 and the standard deviation is .801 (Figure 7).
85% of participants felt immersion to VRETS when
they were using the system. Participants seem to
experience immersion to VRETS from the feeling of
they were actually working on a real engine by
Figure 6: Mean and SD of Interest scores.
themselves. They reported they did not feel much gap
between VRETS and real engine.
“Disassembling and assembling a real engine is
not that easy due the difficulty of access as a student.
However, VRETS allowed me working with engine
and I felt I was practicing with a real engine by myself.
I fully concentrated on VRETS and enjoyed it.”
Figure 7: Mean and SD of Immersion scores.
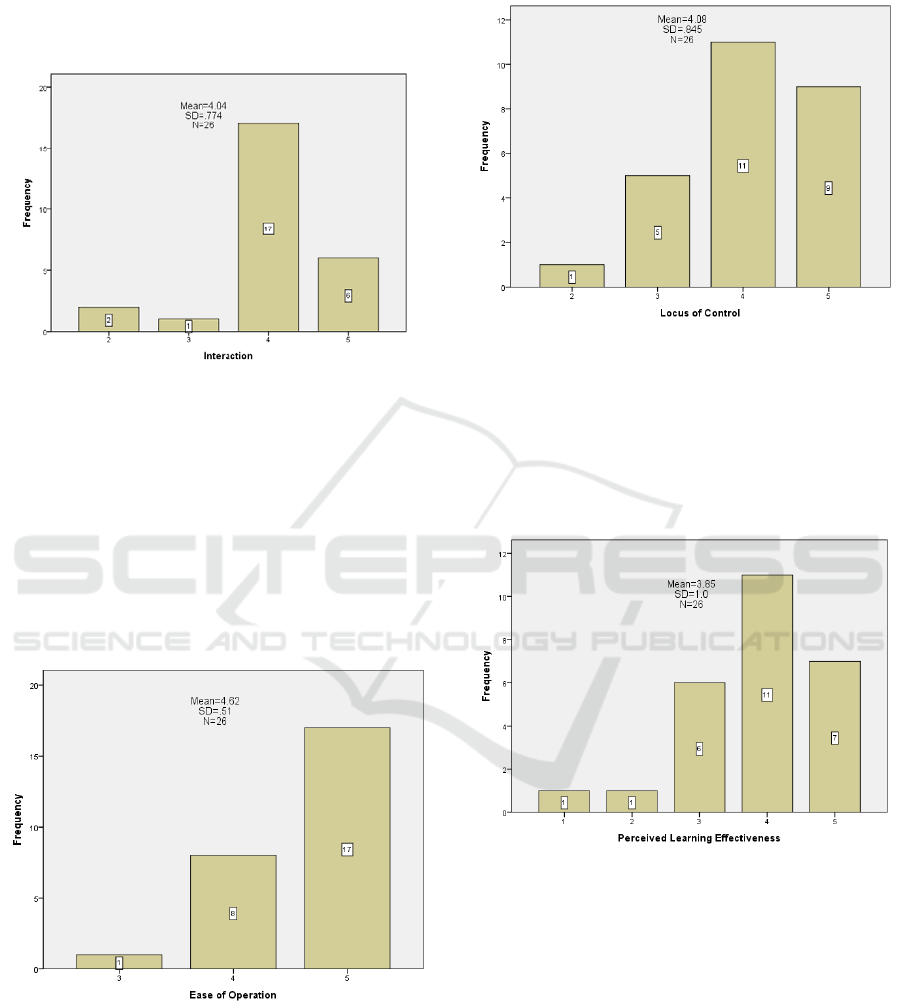
4.4.3 Interaction
The mean score of participants’ responses about
interaction in VRETS is 4.04 and the standard
deviation is .774 (Figure 8). The question was about
how participants feel when they interact in VRETS
using Oculus Rift and Leap Motion. 88% of
participants answered interaction in VRETS was
natural and smooth. Many participants commented
that movement of hand and motion detect was natural
as real in VRETS.
“The hand in VRETS looked like my real hand. The
A Virtual Reality based Engine Training System - A Prototype Development & Evaluation
265
position of virtual hand and real hand was adequate.
Quality of engine visualization was very high.”
It seems like natural interaction in VRETS have
positive impact on participants’ interest, immersion,
and satisfaction.
Figure 8: Mean and SD of Interaction scores.
4.4.4 Ease of Operation
The mean score of ease of operation is 4.62 and the
standard deviation is .51 (Figure 9). 96% of
participants reported that operating VRETS was very
easy for them.
“This was my first time to experience VR contents. I
was little worried about what if I made mistakes
during VRETS operation. However, it was very easy
to use this content and so much fun.”
Figure 9: Mean and SD of Easy of Operation scores.
4.4.5 Locus of Control
The mean score of participants’ thought to locus of
control is 4.08 and the standard deviation is .845
(Figure 10). 80% of participants felt they had full
control of VRETS during their operation. Locus of
control is an important factor for motivation and
satisfaction.
Figure 10: Mean and SD of Locus of Control scores.
4.4.6 Perceived Learning Effectiveness
The mean score of participants’ perceived learning
effectiveness of VRETS is 3.85 and the standard
deviation is 1.0 (Figure 11). 70% of participants
perceived that VRETS would be effective for engine
training.
Figure 11: Mean and SD of Perceived Learning
Effectiveness scores.
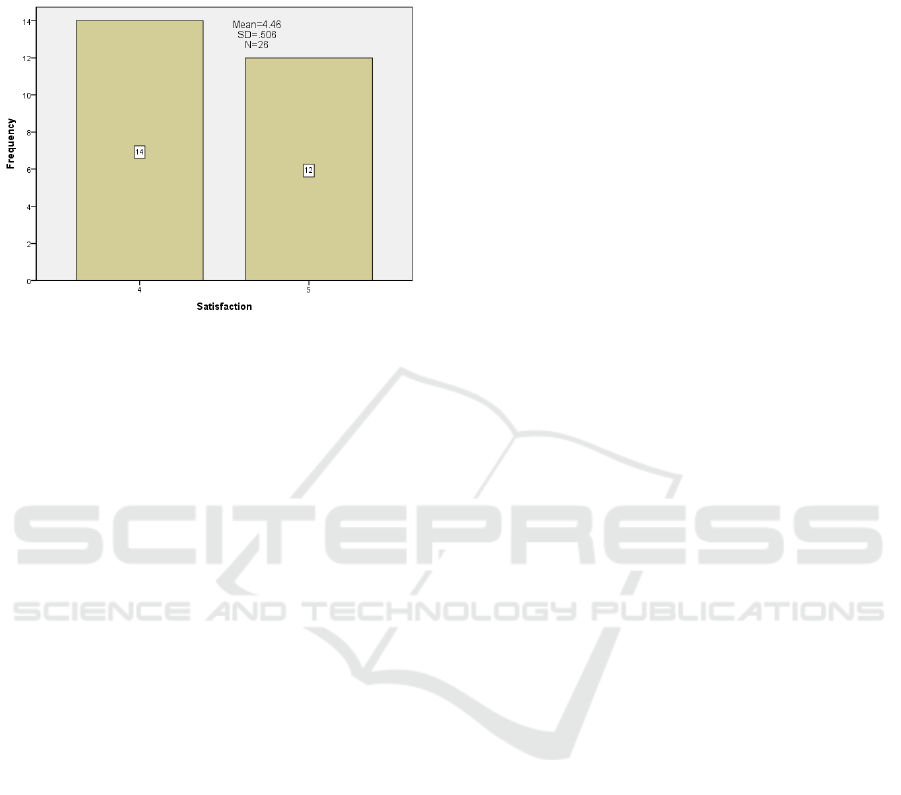
4.4.7 Satisfaction
The mean score of satisfaction to VRETS is 4.46 and
the standard deviation is .506 (Figure 12). We could
find many reasons for high satisfaction to VRETS
from participants’ comments. First, having an
opportunity to manipulate virtual engine that is very
close to real engine made participants satisfied.
Second, many participants enjoyed natural
interactions through the virtual hand and motion
detect technology in VRETS. Third, participants
showed positive attitude on VRETS since it gives
CSEDU 2017 - 9th International Conference on Computer Supported Education
266
ownership to them and allows try and errors
repeatedly. Fourth, participants mentioned they felt
safe to work on VRETS comparing to real engine
situation.
Figure 12: Mean and SD of Satisfaction scores.
5 CONCLUSIONS
In this study, a virtual reality based engine training
system (VRETS) is proposed. We used Oculus Rift
and Leap Motion to provide natural interaction during
engine disassembling and assembling simulation.
Through these VR devices, VRETS use can see their
hand on the content, which is a result of real time
tracking. In addition, VRETS user can experience 360
degree of virtual world by turning his/her head with
Oculus Rift and can manipulate the parts with his/her
hands as if he/she interacts with objects in real world.
Immediate feedback with sound was provided in the
content.
The results of user test show high interest,
immersion, satisfaction, and perceived learning
effectiveness to VRETS. Participants also reported
that VRETS was easy to operate, interaction was
natural, and they had full control of the content. We
suggest that realistic virtual environment is important
for users’ immersion, interest and satisfaction from
the results of this study. Designing natural interaction
would be also critical to enhance user experience with
virtual reality training system. We suggest that true
value of virtual reality based training as creating real
world like demonstration and experiment for users in
a safe virtual environment.
REFERENCES
Alaker, M., Wynn, G. R., & Arulampalam, T., 2016. Virtual
reality training in laparoscopic surgery: A systematic
review & meta-analysis. International Journal of
Surgery, 29, 85-94.
Algorri, M.E., Schmitt, F., 1996. Mesh simplification.
Computer Graphics Forum, 15(3), 78-86.
Astin, A. W., 1984. Student involvement: A developmental
theory for higher education. Journal of college student
personnel, 25(4), 297-308.
Bozgeyikli, E., Raij, A., Katkoori, S., & Dubey, R.,2016,
October). Locomotion in Virtual Reality for Individuals
with Autism Spectrum Disorder. In Proceedings of the
2016 Symposium on Spatial User Interaction (pp. 33-
42). ACM.
Chan, J. C., Leung, H., Tang, J. K., & Komura, T. ,2011. A
virtual reality dance training system using motion
capture technology. IEEE Transactions on Learning
Technologies, 4(2), 187-195.
Choi, J. Y., Lee, J. H., Kim, Y.S., & Kim, S. ,2015. Virtual-
reality based Operation Training System for Steel
Making Process. Journal of Control Robotics and
Systems, 21(8), 709-712.
Clark, R. C., & Mayer, R. E. ,2011. E-Learning and the
Science of Instruction: Proven Guidelines for
Consumers and Designers of Multimedia Learning (3rd
ed.). San Francisco, CA: John Wiley & Sons.
Freitas, S. De. ,2006. Learning in Immersive Worlds: A
Review of Game-Based Learning, JISC, U.K.
Gao, Y., Liu, Y., Cheng, D., Wang, Y. ,2016. A review on
development of head mounted display. Journal of
Computer-Aided Design and Computer Graphics, 28
(6), 896-904.
Ibanez, M. B., Di-Serio, A., & Delgado-Kloos, C. ,2014.
Gamification for engaging computer science students in
learning activities: A case study. IEEE Transactions on
Learning Technologies, 7(3), 291-301.
Ke, F., & Im, T.,2013. Virtual-reality-based social
interaction training for children with high-functioning
autism. The Journal of Educational Research, 106(6),
441-461.
Peden, R. G., Mercer, R., & Tatham, A. J. ,2016. The use
of head-mounted display eyeglasses for teaching
surgical skills: A prospective randomised study.
International Journal of Surgery, 34, 169-173.
Smeragliuolo, A. H., Hill, N. J., Disla, L., & Putrino, D.,
2016. Validation of the Leap Motion Controller using
markered motion capture technology. Journal of
biomechanics, 49(9), 1742-1750.
A Virtual Reality based Engine Training System - A Prototype Development & Evaluation
267
