
Human Skeleton Detection from Semi-constrained Environment Video
Palwasha Afsar, Paulo Cortez and Henrique Santos
ALGORITMI Centre, Department of Information Systems, University of Minho, 4804-533 Guimaraes, Portugal
palo afsar77@yahoo.com, {pcortez, hsantos}@dsi.uminho.pt
Keywords:
Human Action, Action Recognition, Video Data, Skeleton Detection.
Abstract:
The correct classification of human skeleton from video is a key issue for the recognition of human actions
and behavior. In this paper, we present a computational system for a passive detection of human star skeleton
from raw video. The overall system is based on two main modules: segmentation and star skeleton detection.
For each module, several computer vision methods were adjusted and tested under a comparative analysis that
used a challenging video dataset (e.g., different daylight and weather conditions). The obtained results show
that our system is capable of detecting human skeletons in most situations.
1 INTRODUCTION
Due to the widespread use of digital cameras, human
activity recognition from video is becoming a trendy
topic in the area of computer vision (Poppe, 2007;
Turaga et al., 2008; Enzweiler and Gavrila, 2009;
Geronimo et al., 2010; Afsar et al., 2015a). The pas-
sive and automatic recognition of human actions (e.g.,
walking, sitting, exhibiting interest, aggression be-
havior), from monocular images and videos is a valu-
able tool in several computer applications, such as
human computer interaction, video content retrieval,
virtual reality, analysis of sports events, video index-
ing and surveillance. For instance, in (Cortez et al.,
2016) a computer vision system was used to monitor
and forecast the entrance of customers into commer-
cial store, allowing to enhance the store management.
Unlike other well defined computer vision tasks (e.g.,
motion blur, edge detection), human behavior recog-
nition (e.g., exhibiting interest or aggression behav-
ior) does not have a clear algorithmic definition and
thus this task can be challenging.
Human star skeleton recognition from video is a
crucial element of several human action recognition
systems (Orrite-Urunuela et al., 2004; Fujiyoshi et al.,
2004; Chen et al., 2006; Yang and Tian, 2014; Vemu-
lapalli et al., 2016). However, most of these systems
were proposed to work in controlled nonrestrictive en-
vironments (e.g., with humans close to the camera
and wearing distinctive clothing colors when com-
pared with the background). In this position paper, we
present a computational system for a passive detec-
tion of human star skeleton from raw video and that
was built to work in a semi-constrained but more re-
alistic environment. The final and future goal of our
system is to use the detected human skeletons to cre-
ate human movement features (e.g., speed or accelera-
tion) that will fed a machine learning classifier, which
will be trained to detect interesting human behaviors
(e.g., walking, sitting, making a cellular call).
The proposed computer vision system is com-
posed of two main modules (Figure 1): segmentation
(including background subtraction and shadow and
highlight removal) and star skeleton detection. For
each module, we experimented, adjusted and com-
pared several computer vision methods (e.g., adaptive
background mixture model based on Gaussian mix-
ture model versus simpler background subtraction,
thinning algorithm versus simpler zero-crossing). We
report here the results so far achieved using video data
collected in (Afsar et al., 2015b) and that corresponds
to a semi-constrained but realistic university campus
environment. The recorded digital videos are related
with two cameras that were used to capture two par-
ticular examples of interior and exterior human walk-
ing areas from our campus. Since we adopted a real
environment, the recorded data includes several re-
strictions that pose challenges: the cameras were set
in front of a glass window (thus some reflection is
captured) and far away from the human walking envi-
ronment (some humans are captured with a low pixel
definition); there are different weather conditions in
the exterior campus area (e.g., rain and wind) and
varying illumination in both interior and exterior ar-
eas due to different daytime recordings); there are
clutter scenes in both areas due to the presence of
384
Afsar P., Cortez P. and Santos H.
Human Skeleton Detection from Semi-constrained Environment Video.
DOI: 10.5220/0006245803840389
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 384-389
ISBN: 978-989-758-226-4
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

trees and bushes; often, the human clothing includes
colors that are very similar when compared with the
background; and other uncontrolled conditions. Af-
ter tuning the two system modules, interesting human
star skeleton results were achieved (shown in Section
3).
Figure 1: The overall framework of the system.
2 RELATED WORK
A key issue within the context of human action recog-
nition is the automatic detection of human star skele-
ton, typically consisting of a 5-point star (with head,
hands and legs – the human body extremes) and a
body center of mass. In effect, several works have
proposed and adopted methods based on human star
skeletons for action recognition. Two dimensional
images were used in:
• (Orrite-Urunuela et al., 2004) – where manual ef-
fort was used to define the skeleton points; and
• (Chen et al., 2006) and (Fujiyoshi et al., 2004)
– where preprocessing (e.g., segmentation, di-
latation) and zero-crossing methods were used to
build the 5-point human stars.
More recently, three dimensional video has also been
modeled to use similar human skeleton approaches
(Yang and Tian, 2014; Vemulapalli et al., 2016).
However, most of these human skeleton usage or de-
tection works were proposed to work with clean, non-
restrictive environments where: the camera is posi-
tioned close to the human subjects, the background is
clear and colored with a distinctive color when com-
pared with humans, most environments are interior
and thus immune to weather conditions, etc. While
such 2D controlled environments facilitate the devel-
opment of the computer vision system, they are less
realistic and thus are of less practical usage. More-
over, the usage of depth information (3D) does not
have a good precision and/or requires very expensive
equipment when human subjects are far away from
the camera. In this position paper, we use a realistic
2D environment from our university campus and that
contains several challenges (detailed in Section 3.1).
As such, we tune and test several computer vision
methods under this semi-constrained video environ-
ment, resulting in a computational system that is ca-
pable of detecting human skeletons.
3 PROPOSED APPROACH
The task of finding extreme points of a human sil-
houette in realistic environments is challenging due
to self-occlusion, articulated human body, missing
depth information, invariant appearance due to cam-
era viewpoints, illuminations and loose clothing. In
this paper, and similarly to (Chen et al., 2006), we
assume that a human skeleton is developed by de-
tecting extreme points such as head, hands and feet.
These extreme points can be used for the recognition
of many human actions (e.g., walking). The over-
all computational system is based on two main mod-
ules (Figure 1): segmentation (including background
subtraction and shadow and highlight removal); and
star skeleton detection. All experiments were con-
ducted using the Matlab computational environment
(https://www.mathworks.com). In each module, we
experimented, adapted and compared several com-
puter vision methods, as detailed in the next subsec-
tions.
3.1 Video data
For this research, we adopt the video dataset that was
presented in (Afsar et al., 2015b). For capturing the
data, two cameras HIK Vision and IR Network were
installed. Both cameras were “hidden” behind a win-
dow glass (Figure 2) and set to capture real interior
and exterior human walking campus areas (Figure 3).
The whole dataset includes hundreds of small videos
(with few seconds to few minutes each) that corre-
spond to 32GB and that included a non controlled
capturing of human (students, researchers and other
staff) actions (e.g., walking, running, drinking cof-
fee).
Figure 2: Cameras placement for recording the dataset.
The dataset is challenging, due to several uncon-
trolled factors, such as: there is some reflection in
the video (since cameras were set behind a glass);
wide scenes are captured and some humans are far
away from the camera, thus captured with a low res-
olution; there are different weather conditions (e.g.,
Human Skeleton Detection from Semi-constrained Environment Video
385

Figure 3: Examples of the exterior (top frames) and interior
(bottom frames) areas.
sun, rain and wind) and varying illumination due to
different daytime recordings); there are clutter scenes
due to the present of trees and bushes (in both interior
and exterior environments); and often, human wear
clothes that are very similar when compared with the
background. Several of these elements can be seen in
Figure 3.
3.2 Segmentation
3.2.1 Background Subtraction
The video is processed frame by frame and blob anal-
ysis is performed to look for any active blobs. In order
to select only humans and to remove noise, we de-
fined a minimum pixel area for blob selection, which
was set to 2000 pixels (e.g., 45x45, 60x34) after some
preliminary experiments.
For background subtraction, we first tested
the gaussian mixture model proposed in (Kaew-
trakulpong and Bowden, 2002). for separating the
foreground pixels from the background. This detec-
tor works on data collected by a stationary camera
and compares a color or gray scale video frame to a
background model to figure out whether its part of
the background or foreground. It then computes a
foreground mask based on Gaussian Mixture Mod-
els (GMM). This algorithm has the ability to adapt
itself slowly to the changing environment but for our
dataset, the results obtained were not satisfactory. As
shown in Figure 4, the algorithm was not able to de-
tect legs, although there was a large space between
the legs. Note that in Figures 4 and 5 we hide the hu-
man face with a red rectangle to preserve anonymity.
Moreover, the GMM algorithm is computationally ex-
pensive.
We then tested a much simpler and lightweight ap-
proach, based on the absolute subtraction of input and
Figure 4: Segmentation results (first column, a), denotes
the original input frame; second column, b), the Gaussian
mixture model result; and third column, c), the background
subtraction result).
background image. Background was updated by us-
ing the same position of the bounding box obtained
through blob detection as both frames are of the same
size. As an initial step, we subtracted the input Image
I from the background Image B, both in RGB color
space.
M = |B − I| (1)
The obtained mask M was converted to grayscale
and finally to binary using Otsu’s thresholding (Otsu,
1975). This method has the drawback that when the
clothing of the individual’s were light colored, the
results were not good even after apply morphologi-
cal operations. There were some information loss in
the human silhouette, which generated several smaller
blobs rather than one blob for an individual (Figure 5).
Figure 5: a) Original input image, b) result of absolute sub-
traction, c) binary image and d) result with shadow removal
and highlight detection.
Due to light color clothing, illuminations, and dis-
tance from the camera, there is some information loss.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
386

In the resultant image (in RGB space), we tried to:
M
0
(x, y) =
(
1 if M(x, y) ≥ τ.
0 otherwise.
(2)
where M
0
is the final mask, M(x, y) is the pixel value
of the mask, and τ is a threshold. We tested several τ
values (e.g., τ ∈ {10, 20, 30}). The best results were
achieved with τ = 30 (as shown in Figure 6) and thus
this was the selected threshold value.
Figure 6: a) Original image, b) mask for τ=20, c) mask for
τ=30 and d) grayscale mask for τ=30.
Then, we experimented to compute M
0
using the
HSV space, instead of RGB, since this is the same
color space used by the shadow and highlight re-
moval method (Section 3.2.2). The results obtained
are shown in Figure 7. The human silhouette still has
some information loss.
Figure 7: a) Original image, b) HSV image, c) Value com-
ponent, d) binary image and e) result after shadow and high-
light removal.
3.2.2 Shadow Removal and Highlight Detection
We tested the method proposed in (Duque et al.,
2005), where both images, background B and input
image I are transformed into the HSV color space.
A shadow mask S M and highlight mask LM are gen-
erated from these images, defining the areas where
shadows or highlights are present. In these masks
each pixel will have value “1” if it is marked as
shadow or highlight, and value “0” otherwise. The
following equations define the process of computing
the shadow and highlight masks:
SM(x, y) =
1 if α ≤
I
V
(x,y)
B
V
(x,y)
≤ β
∧ | I
S
(x, y) − B
S
(x, y) |≤ τ
S
∧ I
S
(x, y) − B
S
(x, y) |≤ τ
H
0 otherwise
(3)
SM(x, y) =
1 if
1
β
≤
I
V
(x,y)
B
V
(x,y)
≤
1
α
∧ | I
S
(x, y) − B
S
(x, y) |≤ τ
S
∧ I
S
(x, y) − B
S
(x, y) |≤ τ
H
0 otherwise
(4)
The I
H
(x, y) , I
S
(x, y) and I
V
(x, y) represent re-
spectively the hue, saturation and value components
at coordinate (x,y) of the input image I. The same no-
tation is applied to the background image B.
The α is the main parameter and its value depends
on the light source, radiance and reflectance proper-
ties of the objects in the scene. High reflective and
high intensive light sources or irradiant objects can
have low α values. For our dataset, α varies from
0.60 to 0.90. If we decrease the value below 0.60,
there will be information loss. Similarly, if the value
goes above 0.90, the final image will contain noise.
We tested the algorithm with different alpha values,
within the range {0.65,0.66,67,...,0.90} and the best
results were achieved for α=0.70. After setting α,
we experimented distinct values for β, which prevents
misclassification and varies in the data from 0.75 to
0.79. Since this is a less relevant parameter, we exper-
imented distinct values but achieved the same results,
thus this parameter was fixed to β = 0.75. The param-
eters τ
S
and τ
H
are the maximal variation allowed for
the saturation and hue components. We define τ
S
as
15% of the digitizers saturation range. The variation
of hue should not pass the 60 degrees. This value is
obtained through the division of the hue range (360
◦
)
by the six colors (red, yellow, green, cyan, blue and
magenta). The results obtained were satisfactory, as
shown in Figures 5 d), 7 e) and 8.
Figure 8: Example of human silhouettes using background
subtraction combined with shadow and highlight removal.
3.3 Star Skeleton
The main idea of a star skeleton is to connect the ex-
treme points (head, legs, hands) with the centroid (the
body of mass). In this paper, the human contour is
used as the main feature for the construction of a 5
point star skeleton. Depending on the posture of the
human, the points in the skeleton can be either 5 or
less than 5. These points can represent a human pos-
ture effectively and make faster the execution of the
final human action detection. As an initial step, the
Human Skeleton Detection from Semi-constrained Environment Video
387
contour is extracted from the human silhouettes. For
the removal of noise from the human contour, convo-
lution was applied, which removes noise and smooths
a function. A threshold value of 12 was used in order
to achieve the desired level of smoothing. To calcu-
late the distance of individual boundary points from
centroid, the euclidean function was used. The whole
human contour was processed in a clock-wise order.
In a function, extreme points (or local maxima)
are the high peaks points or the points where a zero-
crossing is detected when analyzing smoothed dis-
tance differences. For the construction of the 5-star
skeleton, when the number of points are greater than
5, a threshold value of 40 was used to find the bound-
ary distance between those points, i.e., detect which
boundary points are closer to each other. Then, the
median of such points is used as a representative of
the extreme human part. An example of this is shown
in the third row of Figure 10, where two points are re-
placed by the median for the right hand. The last step
is to connect all of the points to the centroid. Figure 9
depicts the overall procedure for the construction of
the star skeleton. The points A, B, C, D, E and F rep-
resent the extreme points of the smooth distance func-
tion. Since both points A and F are closer in terms of
the boundary space, we take the median of these two
points to represent the left leg when defining the star
skeleton. More examples of the obtained star skele-
tons are shown in Figure 10.
Figure 9: Process flow for the construction of a star skele-
ton.
The full steps for the construction of a star skele-
ton algorithm are:
1 Calculate the centroid of the contour of the input
image (x
c
, y
c
).
x
c
=
1
N
b
N
b
∑
i=1
x
i
y
c
=
1
N
b
N
b
∑
i=1
y
i
(5)
where B
n
are the number of boundary points and
(x
c
, y
c
) denotes the centroid of the input contour.
2 Determine the distance d
i
from each boundary
point (x
i
, y
i
) to centroid (x
c
, y
c
).
d
i
=
q
(x
i
− x
c
)
2
+ (y
i
− y
c
)
2
(6)
3 To remove the noise or unwanted peaks, the dis-
tance function is smoothed using convolution.
4 Find the local maximum by detecting zero cross-
ing of the distance function differences (d
i+1
−d
i
).
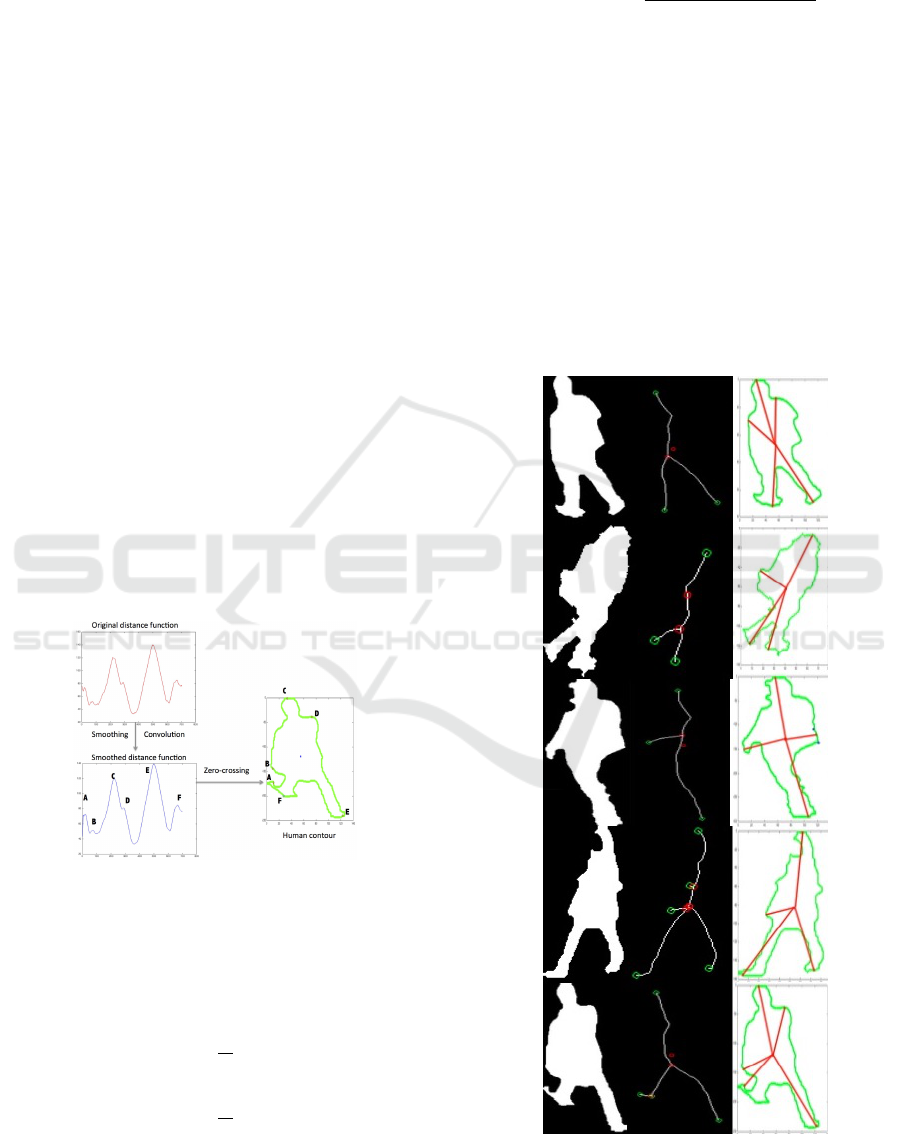
For a comparative analysis, we compared the sim-
pler zero crossing method with a thinning method
(based on the Matlab “bwmorph” function). Figure
10 shows some results obtained by our star skeleton
method and “bwmorph”. It is clear that our approach
performs better for calculating the posture of human
as compared with “bwmorph” function. Moreover,
our approach requires less computation when com-
pared with the thinning method.
Figure 10: Comparative analysis of star skeleton with “bw-
morph” function a) Binary Image b) Modified bwmorph re-
sult c) our skeleton algorithm
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
388

4 CONCLUSIONS
In this paper, we propose a computational system for
a passive detection of a 5-star human skeleton based
on raw video. The system includes two main mod-
ules, segmentation and star skeleton detection, and
it was adjusted and evaluated using a semi-restricted
realistic environment. The realistic videos are re-
lated with interior and exterior human walking ar-
eas with varying illumination, clutter, and other un-
controlled conditions (e.g., weather). Several com-
puter vision methods were explored for the segmenta-
tion and star skeleton modules. The best results were
achieved using simpler approaches: background sub-
traction and shadow and highlight removal using HSV
color space; smoothed Euclidean distance to centroid
and zero-crossing of distance differences to detect the
human extremes. In future work, we intend to use
motion and memory to estimate the position of hu-
man parts (e.g., hands) that might be temporarily hid-
den. Also, we plan to create motion skeleton features
(e.g., velocity, acceleration) in order to train a ma-
chine learning classifier such that it can learn to detect
human actions (e.g., walking, making a cellular call).
ACKNOWLEDGEMENTS
This work has been supported by COMPETE:
POCI-01-0145-FEDER-007043 and FCT - Fundac¸
˜
ao
para a Ci
ˆ
encia e Tecnologia within the Project
Scope: UID/CEC/00319/2013 and research grant
FCT SFRH/BD/84939/2012.
REFERENCES
Afsar, P., Cortez, P., and Santos, H. (2015a). Automatic
human action recognition from video using hidden
markov model. In Computational Science and Engi-
neering (CSE), 2015 IEEE 18th International Confer-
ence on, pages 105–109. IEEE.
Afsar, P., Cortez, P., and Santos, H. (2015b). Automatic
visual detection of human behavior: A review from
2000 to 2014. Expert Systems with Applications,
42(20):6935–6956.
Chen, H.-S., Chen, H.-T., Chen, Y.-W., and Lee, S.-Y.
(2006). Human action recognition using star skele-
ton. In Proceedings of the 4th ACM international
workshop on Video surveillance and sensor networks,
pages 171–178. ACM.
Cortez, P., Matos, L. M., Pereira, P. J., Santos, N., and
Duque, D. (2016). Forecasting store foot traffic us-
ing facial recognition, time series and support vector
machines. In Soft Computing Models in Industrial and
Environmental Applications (SOCO), Advances in In-
telligent and Soft Computing (AISC) Vol. 527, pages
267–276, San Sebastian, Spain. Springer.
Duque, D., Santos, H., and Cortez, P. (2005). Moving object
detection unaffected by cast shadows, highlights and
ghosts. In IEEE International Conference on Image
Processing 2005, volume 3, pages III–413. IEEE.
Enzweiler, M. and Gavrila, D. M. (2009). Monocular pedes-
trian detection: Survey and experiments. IEEE trans-
actions on pattern analysis and machine intelligence,
31(12):2179–2195.
Fujiyoshi, H., Lipton, A. J., and Kanade, T. (2004). Real-
time human motion analysis by image skeletonization.
IEICE TRANSACTIONS on Information and Systems,
87(1):113–120.
Geronimo, D., Lopez, A. M., Sappa, A. D., and Graf, T.
(2010). Survey of pedestrian detection for advanced
driver assistance systems. IEEE transactions on pat-
tern analysis and machine intelligence, 32(7):1239–
1258.
Kaewtrakulpong, P. and Bowden, R. (2002). An im-
proved adaptive background mixture model for real-
time tracking with shadow detection. In Video-based
surveillance systems, pages 135–144. Springer.
Orrite-Urunuela, C., del Rincon, J. M., Herrero-Jaraba,
J. E., and Rogez, G. (2004). 2d silhouette and 3d
skeletal models for human detection and tracking. In
Pattern Recognition, 2004. ICPR 2004. Proceedings
of the 17th International Conference on, volume 4,
pages 244–247. IEEE.
Otsu, N. (1975). A threshold selection method from gray-
level histograms. Automatica, 11(285-296):23–27.
Poppe, R. (2007). Vision-based human motion analysis: An
overview. Computer vision and image understanding,
108(1):4–18.
Turaga, P., Chellappa, R., Subrahmanian, V. S., and Udrea,
O. (2008). Machine recognition of human activities:
A survey. IEEE Transactions on Circuits and Systems
for Video Technology, 18(11):1473–1488.
Vemulapalli, R., Arrate, F., and Chellappa, R. (2016). R3dg
features: Relative 3d geometry-based skeletal repre-
sentations for human action recognition. Computer
Vision and Image Understanding.
Yang, X. and Tian, Y. (2014). Effective 3d action recogni-
tion using eigenjoints. Journal of Visual Communica-
tion and Image Representation, 25(1):2–11.
Human Skeleton Detection from Semi-constrained Environment Video
389
