
A Distributed ICT Architecture for Continuous Frequency Control
Christian Giovanelli
1
, Olli Kilkki
1
, Antti Alah
¨
aiv
¨
al
¨
a
1
, Ilkka Seilonen
1
,
Matti Lehtonen
1
and Valeriy Vyatkin
1,2
1
School of Electrical Engineering, Department of Electrical Engineering and Automation,
Aalto University, 02150 Espoo, Finland
2
SRT, Lule
˚
a University of Technology, Lule
˚
a, Sweden
Keywords:
Smart Grid, Demand Response, Distributed ICT Architecture, Continuous Frequency Control.
Abstract:
The active participation of consumers in frequency control can mitigate the negative effects of variable renew-
able generation in a power system. This study aims at designing a distributed information and communication
technology architecture for automated demand response. The distributed architecture enables a set of con-
sumers to perform frequency control while being coordinated by an aggregator. Moreover, decision-making
algorithms are designed to enable the demand response to participate in frequency control and to provide re-
quired reserves. An asynchronous message-oridented middleware is utilized to interface the consumers with
the aggregator. In addition, the communication logic between the actors is defined. The distributed architec-
ture is then evaluated through the implementation of a prototype application. Simulated results show that the
designed architecture can be utilized for frequency control in automated demand response.
1 INTRODUCTION
In electrical power systems, the supply and demand
are required to be continuously in balance. Any im-
balance either increases or decreases the system fre-
quency which may endanger the system security and
the continuity of electricity supply. In order to co-
ordinate these frequency excursions, power systems
utilize different frequency control processes. In the
Nordic power system, the first control process to react
to the frequency oscillations is called frequency con-
tainment process. Its tasks are to maintain the balance
in time frame of seconds and to stabilize the system
frequency after disturbances (Entsoe, 2015). Thus,
the process has a crucial role in the frequency coordi-
nation. The process activates two types of reserves
in the considered Nordic power system: frequency
containment reserves for normal operation (FCR-N),
and frequency containment reserves for disturbance
(FCR-D) (Fingrid, 2016).
Due to the expansion of variable renewable in the
power supply, the frequency containment is becom-
ing increasingly challenging. For this reason, it is
important to identify new solutions for the frequency
containment, which are not relying only on the sup-
ply. One such a solution is to employ electricity
consumption in the frequency containment process
(Siano, 2014). In particular, the Demand Response
(DR) could contribute to provide the required reserves
by shaping the electricity consumption (Short et al.,
2007). In fact, a large number of consumers provided
with intelligent electronic devices (IED), capable of
shaping and shifting their load, could take part in the
DR. However, the involvement of consumers in the
frequency control process would require an increas-
ing quantity of information exchange, which would
demand improvements to the current information and
communication technologies (ICT) infrastructure of
the power grid.
ICT systems will be among the key elements that
will drive the enhancement of the future power grid
(Gungor et al., 2013). ICT systems could provide
the necessary communication infrastructure, informa-
tion technologies, and applications for an improved
power delivery. Among others, ICT systems enabling
consumers to participate in DR would be needed to
ensure better coordination and decision-making for
the distributed resources. These architectures are re-
quired to be reliable, flexible, and scalable. Thus,
internet-based architectures, such as service-oriented
(Grijalva and Tariq, 2011) and cloud-based (Kim
et al., 2010), have been identified as possible driver
technologies for modernizing the current power grid.
The aim of this paper is to design a distributed
ICT architecture and an application logic capable of
performing automated demand response (ADR) for
Giovanelli, C., Kilkki, O., Alahäivälä, A., Seilonen, I., Lehtonen, M. and Vyatkin, V.
A Distributed ICT Architecture for Continuous Frequency Control.
DOI: 10.5220/0006242201350142
In Proceedings of the 6th International Conference on Smart Cities and Green ICT Systems (SMARTGREENS 2017), pages 135-142
ISBN: 978-989-758-241-7
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
135

continuous frequency control (CFC) of FCR-N. The
architecture consist of an aggregator and a set of con-
sumers that are communicating in order to perform
ADR for CFC. The communication is based on an
asynchronous Message-oriented Middleware (MOM)
that interfaces all the participants of the ADR. In ad-
dition, the aggregator utilizes a specifically designed
algorithm to allocate the DR instructions that con-
sumers have to adhere based on the frequency vari-
ations in the grid. To evaluate the ICT architecture
and the MOM, a set of scenarios are simulated. These
simulations verify the feasibility of the architecture
and validate that the MOM can be utilized for CFC.
The remainder of the paper is organized as fol-
lows. Section 2 introduces the related work. Then,
Section 3 presents the requirements of the ADR sys-
tem, after which Section IV details the design of the
ADR architecture, focusing on both decision-making
algorithms and communication logic. In Section 5,
simulation results are presented, and in Section 6 the
discussion. The final section then draws conclusions.
2 RELATED WORK
The control of FCR-N is conventionally implemented
in a decentralized manner by a droop control, i.e.,
generation plants adjust their output in proportion to
the system frequency. However, the growing pen-
etration of variable renewable generation, which is
replacing the conventional generation (Lalor et al.,
2005) and the increase of reserve requirements (Ha-
lamay et al., 2011), are threatening the stability of the
electrical grid. New strategies for CFC could consider
the demand-side for balancing the system frequency
(Short et al., 2007). Consumers could be involved
in ADR for CFC by controlling domestic appliances
based on the system frequency (Samarakoon et al.,
2012). Examples of such appliances are HVAC, re-
frigerators (Angeli and Kountouriotis, 2012), energy
storage devices (Megel et al., 2013), and electrical ve-
hicles (EVs) (Masuta and Yokoyama, 2012).
Control algorithms are required to provide
decision-making capabilities for enabling the partic-
ipation of the consumers in the DR. Various control
strategies have been designed for performing CFC
(Xu et al., 2011). Control strategies for CFC that
do not require a two-way communication and a cen-
tral coordination have been proposed (Molina-Garcia
et al., 2011). On the other hand, decision-making al-
gorithms have been designed in which an aggregator
coordinates the consumers during their participation
in the DR for CFC (Pourmousavi and Nehrir, 2012),
(Vrettos et al., 2014). The advantage of the latter solu-
tions consists of the possibility to coordinate the pro-
vided reserves of the ADR system. This advantage
becomes important in the case where the provided re-
serves have to be agreed beforehand, during DR plan-
ning phases such as day-ahead and intra-day market.
However, the aggregated coordination of consumers
require the development of new ICT technologies.
The future smart grid will be interdependent with
its ICT architecture (Yan et al., 2013). Currently, ICT
architectures for smart grids are in an initial stage of
development (Zaballos et al., 2011). In fact, vari-
ous technologies need to be developed in order to en-
hance the current ICT architecture (Fang et al., 2012).
Among others, service-oriented middleware for smart
grid have been proposed to have a central role in
the ICT architectures (Rodrigues, 2013). Service-
oriented middleware acts as a broker among many
heterogeneous entities which are communicating in
the smart grid. Considering ADR for CFC, communi-
cation represents an important component for mak-
ing various heterogeneous entities collaborating to-
gether (Kilkki et al., 2014). Nevertheless, ICT archi-
tectures enabling CFC should be further explored to
enhance the distributed control and the communica-
tion between consumers and service providers.
3 REQUIREMENTS
The design of the ADR system defined in this study
needs to fulfill a set of requirements. The main re-
quirement is that the ADR architecture is capable of
performing CFC. The ADR architecture is required
to implement one aggregator and a set of consumers
that are collaborating together in order to execute
CFC. In addition, in order to define an ADR architec-
ture for CFC, several other requirements have to be
met. The following requirements can be categorized
in electrotechnical requirements, communication re-
quirements and system requirements.
To participate in CFC and provide FCR-N, the
ADR system should fulfill certain electrotechnical re-
quirements established by the transmission system
operator (TSO). This is to say that the ADR system
is expected to perform according to these electrotech-
nical requirements. In the Nordic power system, for
the case of FCR-N , the reserve should be fully avail-
able within three minutes after a step change of +/-
0.1 Hz from the nominal frequency, while a maxi-
mum dead-band of +/- 0.05 Hz is allowed (Fingrid,
2016). The reserves are not expected to react if the
frequency is within the dead-band. The amount of
provided reserve is the activated power after three
minutes against the step change. In this study, the
SMARTGREENS 2017 - 6th International Conference on Smart Cities and Green ICT Systems
136

minimum provided reserve size (0.1 MW) by a re-
source owner is not considered, nor any possible fre-
quency measurement errors.
Communication requirements have been identi-
fied for the ADR system for CFC. The communica-
tion between the actors needs to allow the ADR sys-
tem to perform CFC. Due to the electrical requirement
of having the reserve active within three minutes, the
communication should be able to work under these
near real-time constraints. In addition, the communi-
cation should support interoperability between the ac-
tors, which should interact by means of a predefined
format of data exchange. The communication should
also prove to be scalable up to several thousands of
consumers. Furthermore, the communication should
be reliable and secure.
The system requirements define the composition
of the system. The ADR system is composed of two
main actors: an aggregator and a set of consumers.
The aggregator acts as a mediator between consumers
and the utility operator (Gkatzikis et al., 2013). By
interfacing with the consumers participating in the
ADR, the aggregator has an obvious advantage to
have the complete overview of the entire system. For
this reason, the aggregator is required to implement
a decision-making algorithm capable of coordinating
the policies and allocating the reactions that each con-
sumer has to observe for performing CFC.
Consumers represent the second set of actors in
the ADR system. The ADR system is required to have
several thousands of consumers which take part in the
CFC by reacting to the frequency deviations from the
nominal frequency. Each consumer has to own IED
devices that can be used for CFC. Examples of such
IED devices are refrigerators, HVACs and EVs. In
addition, consumers are required to be equipped with
an energy management system (EMS) (Siano, 2014).
The EMS is a IED gateway device capable of inter-
facing with the various IED devices in the home area
network (HAN). Another functionality of the EMS is
to interface the household with the cloud-based sys-
tem for ADR via an IP-based protocol. Moreover, for
executing CFC, the EMS needs to be able to measure
the frequency of the power grid.
4 DESIGN
4.1 ADR System Design
As can be seen from the Figure 1, the ADR system is
composed by three main components: a software sys-
tem with a cloud-based architecture, an electrical grid,
and a set of consumers’ households. The cloud-based
system implements the necessary applications for ex-
ecuting the ADR for CFC. Moreover, the electri-
cal power grid provides electricity to the consumers’
households which can then measure the frequency
though the EMS. The households are equipped with
the EMS that is interfacing within the HAN with a set
of IED devices capable of CFC, and through the WAN
with the cloud-based system.
The cloud-based system for CFC implements two
main applications: the Aggregator and the DR Con-
sumer. The Aggregator application performs the re-
quired functionalities requested from the aggregator
(Gkatzikis et al., 2013). On the other hand, each con-
sumer has one instance of the DR Consumer appli-
cation. The DR Consumer application provides ser-
vices to the consumers for ADR which spans from
energy forecasting, optimization and CFC decision-
making. Moreover, the intra-cloud communication
between different applications is performed by an
asynchronous message oriented middleware (MOM).
The MOM is based on the Advanced Message
Queue Protocol (AMQP, 2016). AMQP provides
asynchronous message-oriented queuing communica-
tion, and it is capable of advanced routing messag-
ing. Among others, AMQP supports both publish-
subscribe and request-response communication. The
AMQP MOM provides several features which are of
fundamental importance to fulfill the communication
requirements of the ADR system. In fact, the AMQP
MOM supports the scalability of the communication
between applications. Moreover, the AMQP MOM
ensures that the various applications in the intra-cloud
system are decoupled. In addition, the AMQP MOM
offers a reliable and secure communication protocol.
Cloud
Cloud
Aggregator
DR
Consumer
DR
Consumer
DR
Consumer
DR
Consumer
DR
Consumer
DR
Optimization
Service
AMQP
MOM
Electric Grid
(Frequency)
EMS
EMS
EMS
EMS
EMS
Power Plant
Figure 1: Overview of the ADR system for continuous fre-
quency control.
A Distributed ICT Architecture for Continuous Frequency Control
137
4.2 Decision-making Algorithms
To perform CFC, two main decision-making algo-
rithms have been implemented in the ADR system.
Firstly, a decision-making algorithm is executed by
each consumer. The algorithm establishes whether a
consumer participates in the CFC, and whether the
consumer reacts to over-frequency, under-frequency,
or both situations. This allows each consumer to be
independent in the decision of participating in the
CFC, based on their capabilities. The aggregator is
then executing the second decision-making algorithm,
in which an allocation algorithm schedules the CFC
reactions of the consumers, and provides the required
coordination for provisioning the reserves.
4.2.1 Consumer Participation Algorithm
Consumers participate in the CFC by either increase
or decrease their consumption. Each consumer can
decide whether or not to take part in the CFC through
the execution of the consumer participation algo-
rithm. This decision-making algorithm is imple-
mented in the DR Consumer application, which, by
knowing the status of the IED devices in the house-
hold, estimates two time based parameters called Par-
ticipation Time (PT) and Reaction Time (RT). These
two parameters are then used to decide whether the
consumer has the capability of providing reserves.
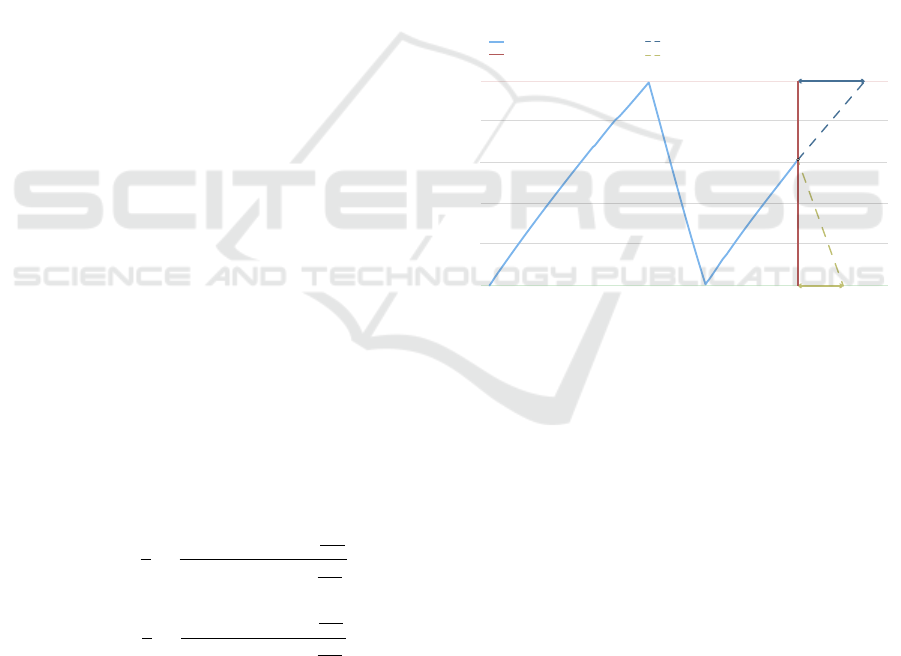
Figure 2 shows how PT and RT are calculated
from a thermodynamic load. Typically, in a thermo-
dynamic load the controlled variable has to stay be-
tween defined upped (T
MAX
) and lower bound (T
MIN
)
limits. Given the current thermal status (T
CT S
) of the
controlled variable, it is possible to project the status
to the respective boundaries in order to calculate the
two parameters. As an example, assuming that Figure
2 represents the thermodynamic status of a refrigera-
tor as presented in (Stadler et al., 2009), the following
equations shows how PT and RT can be calculated for
such a case:
PT = −
1
τ
ln(
T
MAX
− T
AMB
+ η
ptcl
A
T
CT S
− T
AMB
+ η
ptcl
A
) (1)
RT = −
1
τ
ln(
T
MIN
− T
AMB
+ η
ptcl
A
T
CT S
− T
AMB
+ η
ptcl
A
) (2)
where τ is a time constant, T
AMB
represents the ex-
ternal ambient temperature, η is a coefficient of per-
formance, ptcl consists in the rated power (W ) of the
appliance, and A represents the thermal conductance
(W /
◦
C). Besides the refrigerators, this example can
be applied to several types of thermal loads such as
HVAC and water boilers.
The parameters, estimated by the Consumer Par-
ticipation Algorithm, are of fundamental importance
for the aggregator which, through a decision-making
algorithm called Frequency Allocation Algorithm
(FAA), will use these parameters to decide the poli-
cies that each consumer will have to follow. In fact,
PT represents the time in which the consumer has the
capability of participating in the ADR, while RT de-
fines for how long the consumer can react to a fre-
quency deviation. The DR Consumer has to define
the participation and the reaction time for both: the
over-frequency and the under-frequency. Based on
the participation and the reaction time, each consumer
decides whether or not it is possible to take part in the
CFC, and then sends the decision to the aggregator.
Currently, the decision on the participation is based
on defined thresholds for PT and RT, which are both
required to be more than a certain threshold value of
5 minutes.
t
Participation Time (PT)
Reaction Time (RT)
Time
Participation Time Projection
Reaction Time ProjectionCurrent Time (t)
Thermodynamic Load
Thermal Upper Bound Limit (T
MAX
)
Thermal Lower Bound Limit (T
MIN
)
Current Thermal
Status (T
CTS
)
Figure 2: An example of a thermodynamic load with ther-
mal boundary limits. The participation and reaction times
are estimated by projecting the current thermal status to the
upper and lower boundary.
4.2.2 Frequency Allocation Algorithm
The FAA is executed by the aggregator. The algo-
rithm aims to define the policies that each consumer
will have to follow to participate in the CFC and react
to the frequency deviation in the power grid. Based on
the latest updates received from the Consumer Partic-
ipation Algorithms of each consumer, the FAA elab-
orates the policies by allocating the CFC reactions in
the form of instruction messages for the consumers. If
FAA selects one consumer for the CFC, the respective
instruction message will contain the frequency thresh-
old from which the consumer should start reacting,
and provide accordingly the promised reserve.
Algorithm 1 provides the pseudocode of the FAA.
The algorithm starts with the procedure IsUpdate-
Needed. This procedure establishes whether a new
update of the consumer instructions is needed based
SMARTGREENS 2017 - 6th International Conference on Smart Cities and Green ICT Systems
138

on two criteria. The first criteria is based on a timeout
of several minutes after which the CFC reactions are
required to be reallocated. In addition, the second cri-
teria decides whether a new update is needed before
the expiring of the aforementioned timeout. In fact, if
a quota of the allocated consumers updates the aggre-
gator declaring their inability to continue providing
the allocated reserves, then a new update of the con-
sumer instructions is executed.
The FAA begins by retrieving the latest update
messages of each consumer through the GetLates-
tUserUpdates procedure. Then, the algorithm pro-
ceeds by allocating in sequence the under-frequencies
and the over-frequencies to the consumers based on
the updates received. The algorithm ranks the best
consumer for CFC through the OrderByUnderFre-
quency and the OrderByOverFrequency procedures,
which order the consumers respectively for the under-
frequencies and the over-frequencies. These two pro-
cedures order the consumers according to their ability
to perform CFC. The ordering is performed based on
the PT, the RT and an aging parameter, which are sent
from each consumer to the aggregator. While the PT
and the RT are estimated by the DR Consumers, the
aging parameter represents the number of times that
each consumer have acted to the CFC, and it is used
during the ordering to avoid overloading only a small
set of consumers with many CFC reactions. The or-
dering, for both under-frequency and over-frequency,
gives the priority to the consumers with higher PT and
RT, and a smaller aging parameter.
Following the procedures of ordering the con-
sumers, the AllocateUnderFrequency and Alloca-
teOverFrequency procedures are used to allocate the
reaction frequencies to the consumers according to
the given ranking in the ordering. The FAA allo-
cates the frequencies for CFC reaction until the CFC
reaction of the ADR system can cover the required
target reserves. Finally, the algorithm proceeds to
send the new instructions to the consumers through
the SendInstructionsToConsumers procedure.
4.3 Communication Logic
The communication logic of the ADR system can be
divided in two phases: the status update phase and
the instruction phase. These phases are asynchronous
between each other. The status update phase is used
by the consumers to provide the last updates to the
aggregator, while the instruction phase is used by the
aggregator to update the consumers with new policies
for the CFC.
Algorithm 1: Frequency Allocation Algorithm.
1: function FREQUENCYALLOCATION
2: loop
3: . // Checks if a new update is needed
4: if IsUpdateNeeded() then
5: GetLatestUserUpdates()
6: . // Under Frequency Allocation
7: OrderByUnderFrequency()
8: AllocateUnderFrequency()
9: . // Over Frequency Allocation
10: OrderByOverFrequency()
11: AllocateOverFrequency()
12: . // Send instructions to Consumers
13: SendInstructionsToConsumers()
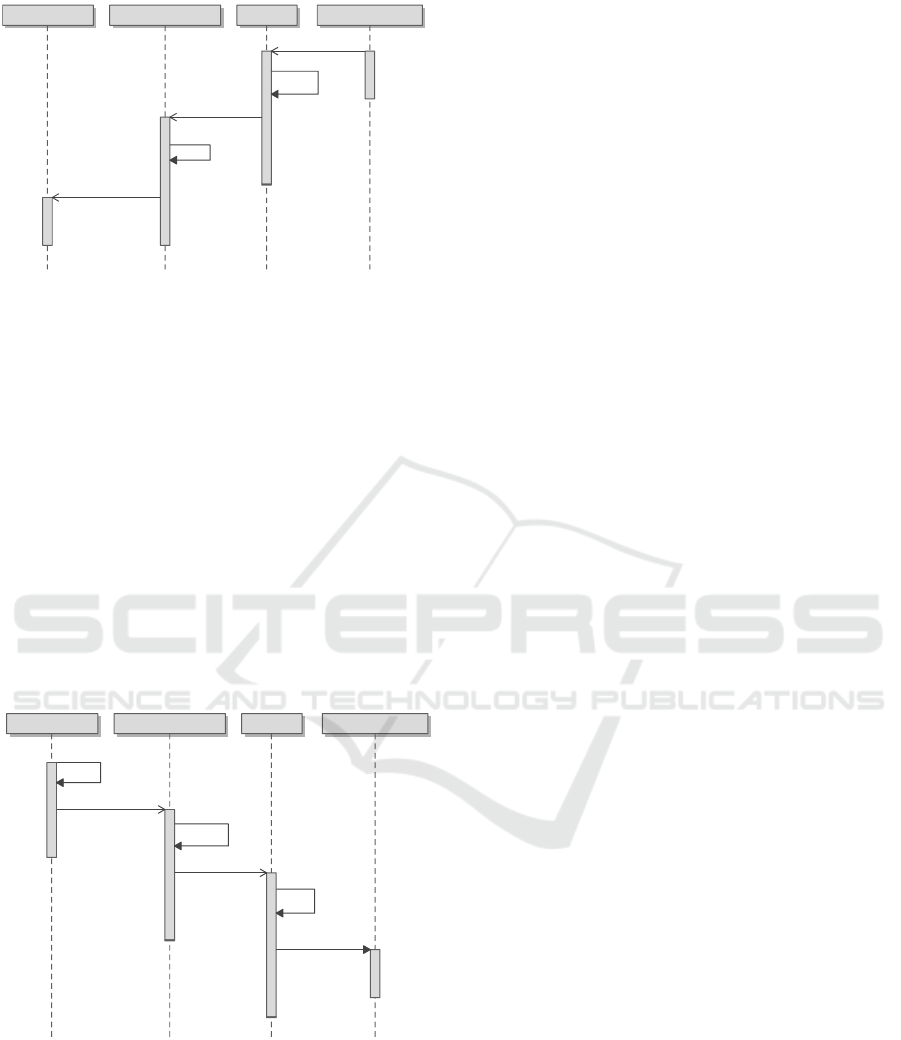
4.3.1 Status Update Phase
The status update phase consists of all the necessary
communication steps needed by the consumers to no-
tify the aggregator about their possibility to partici-
pate in the ADR for CFC. Figure 3 shows the se-
quence diagram of the update phase. Before detailing
the communication logic, it is important to note that
the messages exchanged between each actor during
the update phase are asynchronous.
The update phase starts with each IED device that
sends status update messages to the respective EMS.
The EMS operates as a network gateway by interfac-
ing with various IED devices using different protocols
within the HAN. After processing the data of the IED
devices, the EMS sends a message containing the in-
formation of the IED devices that can be used for CFC
to the DR Consumer. Then, the DR Consumer aggre-
gates the provided data and establishes whether or not
the consumer could participate in the CFC, either to
the over-frequency, the under-frequency or both the
controls. In the last step, the DR Consumer updates
the aggregator, with a Frequency Control S-U mes-
sage, about its capability in participating to the CFC.
4.3.2 Instruction Phase
The second phase of the communication logic is
called instruction phase. During this phase, the ag-
gregator sends the necessary instructions to the con-
sumers, enabling their participation to the CFC. In the
FAA, as shown in Algorithm 1, the aggregator starts
by calling the SendInstructionsToConsumers proce-
dure. Figure 4 presents the sequence diagram of the
communication logic for the instruction phase.
The aggregator starts the instruction phase as the
last task in the execution of the FAA. The algorithm
determines the set of consumers that will be involved
A Distributed ICT Architecture for Continuous Frequency Control
139
Ma
g
icDraw UML, 1-1 \\home.or
g
.aalto.fi\
g
iovanc1\data\Documents\ADR
_
EM\ADR
_
EM.mdzi
p
FinalC
o
Academic Version for Teaching Only, Commercial Development is strictly Prohibited
A
c
a
d
e
m
i
c
V
e
r
s
i
o
n
f
o
r
T
e
a
c
h
i
n
g
O
n
l
y
Co
m
m
e
r
c
i
a
l
De
v
e
l
o
p
m
e
n
t
i
s
s
t
r
i
c
t
l
y
P
FinalConsToAgg FinalConsToAgginteraction [ ]
: DR Consumer (n) : IED Device (n m ) : Aggregator : EMS (n)
Consumer Participation Algorithm4:
Frequency Control S-U5:
IED Device S-U (Status-Update)1:
IED Gateway Data Processing2:
IED Devices S-U3:
Figure 3: A sequence diagram showing the update phase of
the CFC communication logic.
in the CFC. Whereupon, the aggregator sends an In-
struction Message to each DR Consumers which con-
tains the instructions needed to react to the CFC. If the
consumer has to use multiple IED devices for CFC,
the DR Consumer disaggregates the instructions of
the aggregator, and allocates them to each different
IED device. Then, the DR Consumer sends an IED
Control Instruction message to the EMS which con-
tains the control instructions scheduled for the IED
devices. The EMS, when instructed to apply CFC,
measures the frequency of the electric grid, and it re-
acts following the provided instructions. When the
frequency exceeds the given limits, the EMS sends a
DR Reaction Control message to the IED devices in-
volved, which are then participating to the CFC.
Ma
g
icDraw UML, 1-1 \\home.or
g
.aalto.fi\
g
iovanc1\data\Documents\ADR
_
EM\ADR
_
EM.mdzi
p
FinalA
g
Academic Version for Teaching Only, Commercial Development is strictly Prohibited
A
c
a
d
e
m
i
c
V
e
r
s
i
o
n
f
o
r
T
e
a
c
h
i
n
g
O
n
l
y
Co
m
m
e
r
c
i
a
l
De
v
e
l
o
p
m
e
n
t
i
s
s
t
r
i
c
t
l
y
P
FinalAggToCons FinalAggToConsinteraction [ ]
: DR Consumer (n) : IED Device (n m ) : Aggregator : EMS (n)
IED Control Policies4:
Household Data Disaggregation3:
Frequency Allocation Algorithm1:
Instruction Message2:
Measure Frequency5:
DR Control Reaction6:
Figure 4: A sequence diagram that shows the communica-
tion logic of the instruction phase of the ADR system for
CFC.
5 EXPERIMENTATION
The ADR system was evaluated through simulations
based on a prototype application. The prototype ap-
plication has been developed using Java. The proto-
type application is composed of different entities: one
Aggregator application, a set of DR Consumer appli-
cations, and a RabbitMQ MOM (RabbitMQ, 2016)
which relies on the AMQP protocol. For each con-
sumer, the DR Consumer application is interfaced
with the respective EMS. The EMS model provides
the interconnection with the IED devices of the house-
hold. The IED devices of each consumer are modeled
as refrigerators, which will be utilized by the con-
sumers to participate in the ADR for CFC. The re-
frigerator population is based on the models presented
in (Stadler et al., 2009). Moreover, end-to-end com-
munication delays were injected into the ADR system
and uniformly distributed between 1 and 3 seconds.
For the following simulations, various types of
data were utilized. The frequency data were taken
from different sources. The first set of the frequency
data was defined manually with some ad hoc patterns,
while the second set consists of real frequency data
(Mainsfrequency, 2012). The number of consumers
utilized was 5000. The aggregator target reserves
was 40kW for both the over-frequency and the under-
frequency (de la Torre Rodriguez et al., 2014). The
maximum deviation from the nominal frequency in
which the reserves were fully activated was +/- 0.1
Hz, while the dead-band specified was +/- 0.02 Hz.
Moreover, the system frequency dynamics were not
affected by the simulated system, since the controlled
power was relatively low.
In order to verify that the ADR system is capa-
ble of performing CFC, simulations were executed.
Figure 5 presents one hour simulation of the devel-
oped prototype application for the ADR system in
which CFC is performed. Based on the frequency
deviation from the nominal value (50 Hz), the ADR
system was reacting by providing the necessary re-
serves. The aggregated consumption shows how the
consumers of the ADR system were reacting to the
frequency changes of the electrical grid. Again, the
estimated nominal consumption shows instead the es-
timated consumption of the system without being in-
volved in the CFC. The deviation between the aggre-
gated consumption and the estimated nominal con-
sumption represent the amount of reserves that the
ADR system for CFC was able to provide. Lastly,
the vertical dashed lines represent the times in which
the aggregator starts updating the consumers after ex-
ecuting the FAA through the instruction phase.
SMARTGREENS 2017 - 6th International Conference on Smart Cities and Green ICT Systems
140
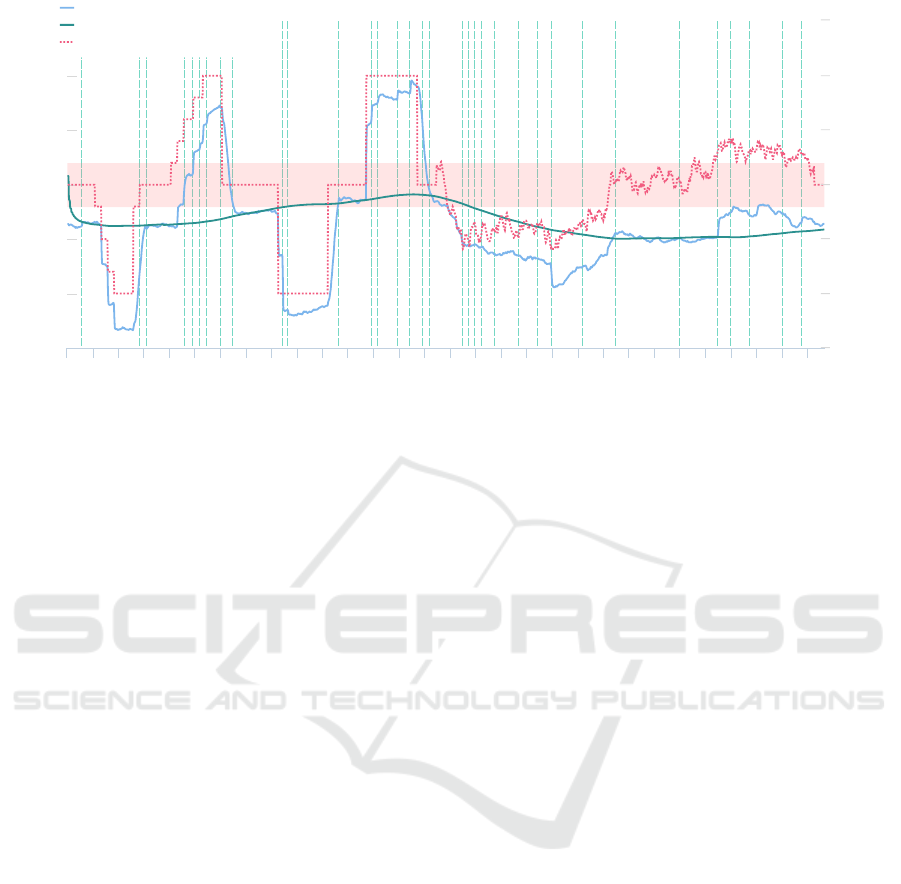
DEAD BAND
Time (min)
Consumption (kW)
Frequency (Hz)
ADR for CFC
Aggregated Consumption with ADR
Estimated Nominal Consumption without ADR
System Frequency
0
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
42
44
46
48
50
52
54
56
58
80
100
120
140
160
180
200
49.85
49.9
49.95
50
50.05
50.1
50.15
Highcharts.com
Figure 5: One hour simulation of the ADR system for CFC. The aggregated consumption of the ADR system reacts to the
frequency changes of the system by providing the allocated reserves by the frequency allocation algorithm.
6 DISCUSSION
As shown in Figure 5, the ADR system performs CFC
by reacting to the frequency changes in the electrical
grid and providing the necessary reserves. Currently,
consumers are using a heterogeneous population of
fridges to apply CFC. Adding more heterogeneity to
the system (i.e. by adding populations of different
IED devices for CFC as HVAC or EVs) as well as in-
creasing the number of consumers could provide both
a more realistic scenario and improve the quality of
the simulation results. This addition would proba-
bly not have a big impact in the communication of
the ADR system. On the other hand, it would affect
both the decision-making algorithms, which would
increase in complexity.
The decision-making algorithms defined in this
study have proved to have a key role in the ADR
architecture. Undoubtedly, the FAA has resulted to
have a fundamental role in the decision-making pro-
cess which enables the ADR system to perform CFC.
The current disadvantage of this algorithm consists in
the fact of being centralized and executed by a single
entity as the aggregator. Thus, a possible improve-
ment would be to redefine the algorithm in a fully
distributed way, in which the aggregator could spec-
ify the objectives (e.g. in term of reserves) that the
ADR system should achieve, while the consumers al-
together could negotiate the CFC reactions needed to
fulfill the specified objectives. In addition, the partici-
pation of the consumers in the CFC is currently based
only on the two parameters PT and RT. An improve-
ment of the consumer participation algorithm could
include user preferences as a key factor for deciding
whether a consumer can participate to the CFC.
Compared to the previous study (Giovanelli et al.,
2016), in which the communication was used for an
energy consumption planning phase with no time con-
straints, the current communication had to deal with
near real-time constraints. This constraint was due to
the electrical requirement of having the reserves fully
available within three minutes. This additional con-
straint has allowed to further stretch the asynchronous
MOM, which has resulted to well perform also in the
presented new scenario.
7 CONCLUSIONS
This paper presented a prototype of ADR system ca-
pable of performing CFC. A set of consumers was
communicating with an aggregator in order to pro-
vide the required reserves during events of frequency
deviations. For the intra-cloud communication, an
asynchronous MOM was utilized to interface the con-
sumers with the aggregator. Moreover, two decision-
making algorithms were defined to enable the con-
sumers to participate in the CFC. Finally, the capabil-
ity of the ADR system to provide CFC was evaluated
based on simulations with real data.
Future research might explore the possibility of
improving the decision-making algorithm for fre-
quency allocation. A further study could enhance the
FAA by supporting different IEDs and exploiting their
different properties. Moreover, a distributed solution
for the FAA could further enhance the ADR system.
A Distributed ICT Architecture for Continuous Frequency Control
141

In fact, a distributed algorithm could provide a more
robust and reliable solution.
ACKNOWLEDGEMENTS
This research has been funded by the SAGA project
of the Aalto Energy Efficiency (AEF) Research Pro-
gram and the Flexible Customer project funded by the
Academy of Finland.
REFERENCES
AMQP (2016). Amqp web page, https://www.amqp.org/.
Angeli, D. and Kountouriotis, P.-A. (2012). A Stochastic
Approach to Dynamic-Demand Refrigerator Control.
IEEE Transactions on Control Systems Technology,
20(3):581–592.
de la Torre Rodriguez, M., Scherer, M., Whitley, D., and
Reyer, F. (2014). Frequency containment reserves di-
mensioning and target performance in the European
power system. In 2014 IEEE PES General Meeting —
Conference & Exposition, pages 1–5. IEEE.
Entsoe (2015). Supporting document for the network code
on load-frequency control and reserves.
Fang, X., Misra, S., Xue, G., and Yang, D. (2012). Smart
gridthe new and improved power grid: A survey. IEEE
communications surveys & tutorials, 14(4):944–980.
Fingrid (2016). Fingrid web page,
http://www.fingrid.fi/en/pages/default.aspx.
Giovanelli, C., Kilkki, O., Seilonen, I., and Vyatkin, V.
(2016). Distributed ict architecture and an application
for optimized automated demand response. In IEEE
PES ISGT Europe 2016. IEEE.
Gkatzikis, L., Koutsopoulos, I., and Salonidis, T. (2013).
The role of aggregators in smart grid demand response
markets. IEEE Journal on Selected Areas in Commu-
nications, 31(7):1247–1257.
Grijalva, S. and Tariq, M. U. (2011). Prosumer-based smart
grid architecture enables a flat, sustainable electricity
industry. In ISGT 2011, pages 1–6. IEEE.
Gungor, V. C., Sahin, D., Kocak, T., Ergut, S., Buccella, C.,
Cecati, C., and Hancke, G. P. (2013). A Survey on
Smart Grid Potential Applications and Communica-
tion Requirements. IEEE Transactions on Industrial
Informatics, 9(1):28–42.
Halamay, D. A., Brekken, T. K. A., Simmons, A., and
McArthur, S. (2011). Reserve Requirement Impacts
of Large-Scale Integration of Wind, Solar, and Ocean
Wave Power Generation. IEEE Transactions on Sus-
tainable Energy, 2(3):321–328.
Kilkki, O., Kangasr
¨
a
¨
asi
¨
o, A., Nikkil
¨
a, R., Alah
¨
aiv
¨
al
¨
a, A.,
and Seilonen, I. (2014). Agent-based modeling and
simulation of a smart grid: A case study of communi-
cation effects on frequency control. Engineering Ap-
plications of Artificial Intelligence, 33:91–98.
Kim, Y.-J., Thottan, M., Kolesnikov, V., and Lee, W. (2010).
A secure decentralized data-centric information in-
frastructure for smart grid. IEEE Communications
Magazine, 48(11):58–65.
Lalor, G., Mullane, A., and O’Malley, M. (2005). Fre-
quency Control and Wind Turbine Technologies.
IEEE Transactions on Power Systems, 20(4):1905–
1913.
Mainsfrequency (2012). Mainsfrequency web page,
http://www.mainsfrequency.com/services.htm.
Masuta, T. and Yokoyama, A. (2012). Supplementary load
frequency control by use of a number of both electric
vehicles and heat pump water heaters. IEEE Transac-
tions on Smart Grid, 3(3):1253–1262.
Megel, O., Mathieu, J. L., and Andersson, G. (2013). Max-
imizing the potential of energy storage to provide fast
frequency control. In IEEE PES ISGT Europe 2013,
pages 1–5. IEEE.
Molina-Garcia, A., Bouffard, F., and Kirschen, D. S.
(2011). Decentralized demand-side contribution to
primary frequency control. IEEE Transactions on
Power Systems, 26(1):411–419.
Pourmousavi, S. A. and Nehrir, M. H. (2012). Real-
Time Central Demand Response for Primary Fre-
quency Regulation in Microgrids. IEEE Transactions
on Smart Grid, 3(4):1988–1996.
RabbitMQ (2016). Rabbimq web page,
https://www.rabbitmq.com/.
Rodrigues, J. (2013). Service-oriented middleware for
smart grid: Principle, infrastructure, and application.
IEEE Communications Magazine, 51(1):84–89.
Samarakoon, K., Ekanayake, J., and Jenkins, N. (2012). In-
vestigation of Domestic Load Control to Provide Pri-
mary Frequency Response Using Smart Meters. IEEE
Transactions on Smart Grid, 3(1):282–292.
Short, J. A., Infield, D. G., and Freris, L. L. (2007). Sta-
bilization of Grid Frequency Through Dynamic De-
mand Control. IEEE Transactions on Power Systems,
22(3):1284–1293.
Siano, P. (2014). Demand response and smart gridsA sur-
vey. Renewable and Sustainable Energy Reviews,
30:461–478.
Stadler, M., Krause, W., Sonnenschein, M., and Vogel, U.
(2009). Modelling and evaluation of control schemes
for enhancing load shift of electricity demand for
cooling devices. Environmental Modelling & Soft-
ware, 24(2):285–295.
Vrettos, E., Oldewurtel, F., Zhu, F., and Andersson, G.
(2014). Robust Provision of Frequency Reserves by
Office Building Aggregations. IFAC Proceedings Vol-
umes, 47(3):12068–12073.
Xu, Z., Ostergaard, J., and Togeby, M. (2011). Demand as
Frequency Controlled Reserve. IEEE Transactions on
Power Systems, 26(3):1062–1071.
Yan, Y., Qian, Y., Sharif, H., and Tipper, D. (2013). A
survey on smart grid communication infrastructures:
Motivations, requirements and challenges. IEEE com-
munications surveys & tutorials, 15(1):5–20.
Zaballos, A., Vallejo, A., and Selga, J. M. (2011). Heteroge-
neous communication architecture for the smart grid.
IEEE Network, 25(5):30–37.
SMARTGREENS 2017 - 6th International Conference on Smart Cities and Green ICT Systems
142
