
Shallow Networks for High-accuracy Road Object-detection
Khalid Ashraf, Bichen Wu,Forrest N. Iandola, Mattthew W. Moskewicz and Kurt Keutzer
Electrical Engineering and Computer Sciences Department, UC Berkeley, Berkeley, U.S.A.
Keywords:
Autonomous Driving, Vehicle Detection, Deep Learning.
Abstract:
The ability to automatically detect other vehicles on the road is vital to the safety of partially-autonomous
and fully-autonomous vehicles. Most of the high-accuracy techniques for this task are based on R-CNN or
one of its faster variants. In the research community, much emphasis has been applied to using 3D vision or
complex R-CNN variants to achieve higher accuracy. However, are there more straightforward modifications
that could deliver higher accuracy? Yes. We show that increasing input image resolution (i.e. upsampling)
offers up to 12 percentage-points higher accuracy compared to an off-the-shelf baseline. We also find situations
where earlier/shallower layers of CNN provide higher accuracy than later/deeper layers. We further show that
shallow models and upsampled images yield competitive accuracy. Our findings contrast with the current
trend towards deeper and larger models to achieve high accuracy in domain specific detection tasks.
1 INTRODUCTION AND
MOTIVATION
Advanced driver assistance systems (ADAS) and in-
creasingly autonomous vehicles promise to make
transportation safe, efficient and cost effective.
Driven by the goal of building a safe transportation
system, ADAS has emerged as a leading research
direction in recent years (Hillel et al., 2012; Hu-
val et al., 2015; Rajpurkar et al., 2015; Chen et al.,
2015a). Some specific ADAS related machine learn-
ing tasks include detection of road boundaries, lane
topologies, location of other cars, pedestrians, road
signs and obstacles. These detection capabilities form
the core of an ADAS technology stack. Other parts
of the technology stack include decision making and
control systems that take action in a certain road situ-
ation based on the input from the perception system.
Although this picture works in controlled environ-
ments, making this technology effective in changing
road situations, emergencies, changing weather etc.
remains a significant challenge.
In recent times, deep learning has shown leading
accuracy in a number of machine learning challenges.
Specifically relevant to ADAS application is the dra-
matic increase in accuracy of image object classifica-
tion (Krizhevsky et al., 2012; Szegedy et al., 2014;
Simonyan and Zisserman, 2014; He et al., 2015) and
localization (Sermanet et al., 2014; Zhu et al., 2015;
Girshick et al., 2014; Girshick, 2015; Ren et al., 2015)
in the last few years. A key advantage of DNN-based
approaches is that they do not require hand tuned fea-
tures for detecting every object but rather learn the
representation from the data itself. Deep learning
based perception systems promise to play a key role
in navigation and safety software stack for ADAS.
R-CNN and its faster variants have become the
state of the art in different object detection tasks. In
this work, we leverage this method to establish a num-
ber of observations related to car detection on the
challenging KITTI (Geiger et al., 2012) dataset. Our
main results can be summarized as:
• Bigger input images lead to higher accuracy.
Input image resolution increases the accuracy of
car detection using the faster R-CNN network.
• Shallow models can deliver high accuracy.
Convolutional features from shallow or earlier
layers of DNNs lead to higher accuracy than fea-
tures from the deeper layers. This holds true
for deep models like VGG16. Surprisingly, even
shallow models like AlexNet provide high accu-
racy on the detection task. Using shallow models
that require less memory allow us to use very high
input image resolutions. In terms of accuracy,
shallow models with high resolution are compet-
itive with deeper models with traditional resolu-
tion. This result is surprising given the trend of
searching for deeper models for achieving high
accuracy on object detection tasks.
The rest of the paper is organized as follows. In
Ashraf, K., Wu, B., Iandola, F., Moskewicz, M. and Keutzer, K.
Shallow Networks for High-accuracy Road Object-detection.
DOI: 10.5220/0006214900330040
In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2017), pages 33-40
ISBN: 978-989-758-242-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
33

Section 2 we review related work, and we provide
technical background information in Section 3. We
describe our initial experimental setup in Section 4.
We get to the crux of our results about large image
resolution in Section 5 and shallow models in Sec-
tion 6. We do additional exploration of R-CNN based
configurations in Section 7 We summarize our find-
ings in the context of the related work in Section 8,
and we conclude in Section 9.
2 RELATED WORK
2.1 Deep Networks for Object Detection
Deformable parts models (DPM) were the state of the
art for image object detection (Felzenszwalb et al.,
2010) before the emergence of deep convolutional
neural nets. The R-CNN method uses selective search
for object region proposal (Girshick et al., 2014). The
proposed regions in an image are warped to a fixed
size and fed into a classification network called R-
CNN. Fast R-CNN was introduced to reuse the shared
convolution features for the region proposals (Gir-
shick, 2015). In Fast R-CNN (Girshick, 2015), the in-
ference speed is still dominated by the region proposal
in the selective search method. Faster R-CNN (Ren
et al., 2015) proposes object bounding boxes directly
from the convolutional features. Inspired by the SPP-
Net (He et al., 2014) method, Faster R-CNN uses a
region proposal network (RPN) to regress proposal
boxes to ground truth boxes. The regions proposed
by the RPN network is fed into the R-CNN network
for classification. The network is trained end to end.
1
Other than the RPN based method, there are several
methods proposed for object bounding box predic-
tion. For example, the OverFeat (Sermanet et al.,
2014) method predicts a single box for localization
whereas the Multibox (Erhan et al., 2014; Szegedy
et al., 2015) method predicts multiple boxes in a class-
agnostic way. The SPP method (He et al., 2014) uses
shared convolutional feature maps for fast object de-
tection.
2.2 Detection on the KITTI Dataset
2.2.1 Detection using 2D Data
Deep neural networks are the backbone of most high-
accuracy approaches to identifying objects such as
1
The Faster R-CNN codebase also offers piecewise
training of RPN and classifier branches of the network, but
we found this cumbersome, and we use end-to-end training
in all of our Faster R-CNN experiments.
cars in KITTI and similar datasets. Many such meth-
ods have been proposed; we focus this section on
the high-accuracy and peer-reviewed results. A high-
accuracy method for identifying objects in KITTI
dataset is scale dependent pooling (SDP) combined
with cascaded region classifiers (CRC) (Yang et al.,
2016). The crux of SDP+CRC lies in selecting a high-
resolution CNN layer (e.g. conv3 3 in VGG16 (Si-
monyan and Zisserman, 2014)) or a heavily down-
sampled CNN layer (e.g. conv5 3), depending on the
resolution of each region proposal. By combining fea-
tures from multiple convolution layers, they were able
to achieve very high accuracy on KITTI’s object de-
tection task. Our method introduced in this paper is
even simpler in that we use only a single layer for
feature extraction.
Another approach is Monocular 3D (Mono3D)
which actually uses 2D images, but it aims to identify
the pose of objects, with the goal of detecting objects
as 3D bounding boxes. Like SDP+CRC, Mono3D is
built around a version of R-CNN. There are also a
number of anonymous and/or sparsely-explained sub-
missions to the KITTI website’s leaderboard that are
reportedly built on top of R-CNN.
2.2.2 Detection using 3D Data
The KITTI dataset provides 3D information in the
form of stereo images and LIDAR point clouds. Re-
cent results such as 3DVP (Xiang et al., 2015) and
3DOP (Chen et al., 2015b) leverage both 2D and 3D
data to achieve higher accuracy relative to comparable
2D baselines.
To build supervised 2D datasets such as Ima-
geNet (Deng et al., 2009) and PASCAL (Everingham
et al., 2010), a widely-used approach is to have me-
chanical turk workers annotate user-generated images
and videos from websites such as Flickr or YouTube.
However, to our knowledge, there is no 3D equivalent
of Flickr or YouTube that receives petabytes per week
of user-uploaded 3D imagery. As a result, the over-
head in building a 3D dataset currently requires not
only data annotation, but also data collection. The
cost of data collection includes hours of human la-
bor, and it can also require expensive sensors. The
KITTI dataset was released several years ago. How-
ever, the Velodyne HDL-64E LIDAR scanner used
by the KITTI team still costs 80,000 USD
2
, which
is more than twice the price of the average new car
in the United States. With all of this in mind, we
think widespread research on 3D object detection will
be slow to emerge until (1) there is an internet hub
that attracts large quantities of user-generated 3D im-
2
http://articles.sae.org/13899
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
34
agery, and (2) the equivalent of today’s high-end LI-
DAR sensors become available for tens of US dollars.
With this in mind, we focus our efforts on 2D im-
agery, where anyone with modest resources can col-
lect a custom training set and apply our object detec-
tion approach.
3 PRELIMINARIES
3.1 Relationship of Conv and Pooling
Strides to Activation Grid
Dimensions
The feature dimension of the output of a spatial con-
volution operation depends on the dimension of its
input and the strides used (ignoring the boundary ef-
fects). In convolutional neural nets, strides are used
to continually reduce the feature dimensions in the
convolution layers. Additionally pooling layers are
used to reduce dimension by averaging or taking max-
imum value within a neighborhood. Thus the spatial
dimension of the output of the convolution decreases
as we go to deeper layers. For example, in VGG16,
for a standard input image size 224x224, the features
calculated by the first convolution layer is 224x224
which reduce to 14x14 at the output of conv5 3. This
dimension is further reduced by the pool5 layer to
7x7. Similarly for AlexNet, the convolution feature
dimension reduces from 55x55 in conv1 to 6x6 in
pool5.
In some CNN architectures such as
AlexNet (Krizhevsky et al., 2012) and VGG16 (Si-
monyan and Zisserman, 2014), the first fully-
connected layer expects a specific height and width
for its input data (e.g. 6x6 for AlexNet). Increasing
the height and width of the input image results in a
higher-resolution input to the first FC layer. At the
CNN architecture level, an easy way around this is
to design a CNN architecture that has global average
pooling prior to the first FC layer – this approach
was popularized in the Network-in-Network (NiN)
architecture (Lin et al., 2013), and it is now used
in other architectures such as SqueezeNet (Iandola
et al., 2016) and ResNet architectures (He et al.,
2015). However, when using AlexNet or VGG19, the
R-CNN authors developed a technique called ROI
Pooling that allows any size input image to be used in
concert with AlexNet/VGG FC layers. ROI pooling
is quite simple: no matter what the input image size
is, ROI Pooling uses max-pooling to reshape the first
FC layer’s input to the size that it expects.
3.2 Region Proposal Network in Faster
R-CNN
We briefly review how the region proposal network
(RPN) in Faster R-CNN generate proposals (Ren
et al., 2015) that will be useful later. RPN starts with
convolution layers, which computes a high dimen-
sional, low resolution feature map for the input image.
Next, a small network slides through each spatial po-
sition in the feature map and generates rectangular re-
gion proposals centered around the position. Instead
of computing the proposal’s absolute coordinates, the
RPN actually computes coordinates relative to a set of
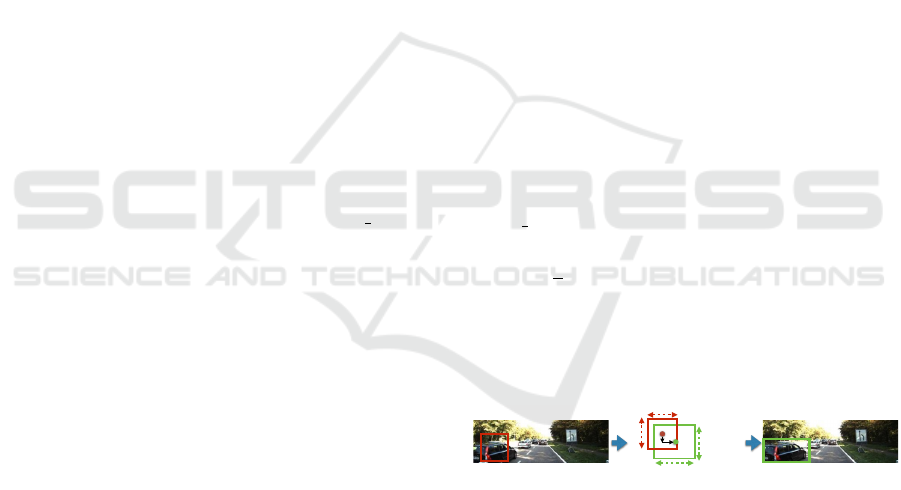
k pre-selected reference boxes, or anchors. The trans-
formation from an anchor to a proposal is illustrated
in Fig. 1.
Intuitively, we want the anchors to be spatially
close to the ground truth bounding boxes. In an ex-
treme case, if an anchor box is too far away from the
ground truth bounding box, learning to transform the
anchor to the ground truth will be hopeless. Since
anchors are centered at each spatial position on the
feature map, and each position on the feature map
corresponds to a patch of pixels on the original im-
age, the resolution of the feature map affects the dis-
tance from a ground truth bounding box to its near-
est anchor. In VGG16, for example, each position in
conv5 3 layer spatially corresponds to a 16 ×16 patch
on the original image, so in the worst case, the nearest
anchor to the center of a ground truth bounding box
is 16 ×
√
2/2 ≈ 11.31. As we will see later in this
paper, reducing this distance, or relatively, increasing
the “anchor density” will significantly increase the lo-
calization accuracy, thus improve the detection accu-
racy.
w
a
exp(w)
h
a
exp(h)
w
a
h
a
h
a
y
w
a
x
Anchor box
Box transformation
Proposal box
Figure 1: Transformation from an anchor box (left) to a
proposal (right). 4 relative coordinates are regressed by the
RPN network to adjust the center position and the shape of
the bounding box.
4 EXPERIMENTAL SETUP
4.1 Networks and Training
Configuration
We train faster R-CNN networks built on the
VGG16 (Simonyan and Zisserman, 2014) and
AlexNet (Krizhevsky et al., 2012), pretrained on
Shallow Networks for High-accuracy Road Object-detection
35

the ImageNet-1k (Deng et al., 2009) classification
dataset. VGG16 has sixteen convolution layers (Si-
monyan and Zisserman, 2014) and AlexNet has only
five convolutional layers (Krizhevsky et al., 2012).
Rather than using the convolution features of the last
pooled layer (as is done in the original faster R-CNN
paper), we use features from convolutional layers that
are the bottom layers of the previous pooling layer.
For VGG16 it is conv4 3. We resize the roipooling
window size accordingly. For VGG16 the window
size changes from 7x7 to 13x13. We also reduce the
feature stride by a factor of two for avoiding one pool-
ing stage. For VGG16 and AlexNet, fully connected
layers are used as the R-CNN branch. The weights
in these layers are initialized with random gaussian
noise. As the standard procedure introduced in faster
R-CNN, we randomly sample 128 positive and 128
negative roi proposals per batch to train the R-CNN
layer. For all the experiments, we use initial learning
rate of 0.0005, step size 50000 and momentum 0.9.
A total of 70K iterations are run during R-CNN train-
ing starting from imagenet pre-trained weights for the
convolution layers.
4.2 Dataset
We use the KITTI object detection dataset. KITTI
object has three categories that is car, pedestrian, bi-
cyclists. The dataset is annotated in three categories
based on the occlusion and truncation of the objects.
The hard category is heavily occluded and truncated
whereas the easy category is relatively clearly visi-
ble. There are about 8000 images for both training
and testing. The moderate regime is used to rank the
competing methods in the benchmark. Our split of the
KITTI train and validation sets (each containing half
of the images) is the same as (Chen et al., 2015b).
The evaluation criteria is the same that is prescribed in
the KITTI development kit. In KITTI’s evaluation cri-
teria, proposal boxes having overlap with the ground
truth or IoU greater than 70% are counted as true de-
tection for cars.
The Faster R-CNN algorithm has been shown
to deliver high accuracy on the PASCAL (Evering-
ham et al., 2010) dataset. Adapting that pipeline
from PASCAL to KITTI poses a few natural chal-
lenges. First, the image sizes in the KITTI dataset
is 1242x375 pixels whereas the image sizes in PAS-
CAL dataset is 500 pixels in the longest dimension
(many PASCAL images are 500x333 or 333x500).
More importantly, the KITTI dataset contains heavily
occluded and truncated objects. These objects come
in multiple scales. The presence of objects at mul-
tiple scales make it difficult to attain high accuracy
specially for small objects.
5 INPUT IMAGE RESOLUTION
We performed extensive design space search of Faster
R-CNN configurations on the KITTI dataset. Our
starting point is the VGG16 network that has achieved
high accuracy in both image classification (Simonyan
and Zisserman, 2014) and localization (Ren et al.,
2015). We performed an input image scaling exper-
iment to find its impact on the accuracy. In these ex-
periments, the shorter side of the KITTI images were
fixed at 1295 pixels. In the Faster R-CNN codebase,
the default off-the-shelf configuration resizes all im-
ages to 1000 pixels in the long dimension.
KITTI images have a native resolution of
1295x375, so the default Faster R-CNN behavior is to
resize KITTI images to 1000x302. But, is this resiz-
ing scheme ideal for obtaining high accuracy? To find
out, we doubled the input image height and width to
2000x604. This has the effect of doubling the height
and width of the activations (outputs) from all convo-
lutional layers. For example, the conv5 3 activations
– which serves as input to both the region proposal
network (RPN) and the classification network – dou-
ble in height and width. With the image upsampled
to 2000x604, we see in Table 1 that the KITTI car-
detection accuracy increases for easy, medium, and
hard by 7.1, 15.5, and 12.6 percentage points, respec-
tively. In a world where half of a percentage point is
considered significant, we can say with certainty that
the input resolution has a major impact on accuracy.
Can further upsampling of the image lead to
further improvements in accuracy? We attempted
to perform experiments with upsampling beyond
2000x604, but the volume of activation planes ex-
ceeded the 12GB of available memory on an NVIDIA
Titan X GPU. In the next section, we consider shal-
lower networks with fewer layers of activation planes,
which enables us to move to even higher input resolu-
tions.
Table 1: KITTI car detection accuracy using different in-
put image sizes to VGG16. In these experiments, we use
conv5 3 features from VGG16.
AP
Input resolution Easy Medium High
1000x302 80.3 63.0 52.3
2000x604 87.4 78.5 64.9
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
36
6 SHALLOW CONVOLUTIONAL
MODELS
So far, we have upsampled the input image until we
ran out of on-chip GPU memory when training R-
CNN models with a VGG16-based feature representa-
tion. Based on what we have seen so far, it seems that
further upsampling may lead to further gains in ac-
curacy. We need to find a configuration that requires
less memory for a given image size, and then we will
exploit this extra memory to further upsample the im-
age. One idea would be to decrease the batch size to
save memory, but we are already using a batch size of
1, and it’s not clear how to reduce the batch size below
1. Could we reduce the memory footprint by reducing
the number of layers in the CNN? Much of the recent
literature shows that fewer layers in a CNN leads to
lower accuracy (all else held equal). But, our goal
is to configure a CNN with fewer layers (and mod-
erately lower accuracy) and then increase the input
image resolution (leading to much higher accuracy).
To evaluate this idea, we configure R-CNN to use
2000x604 images (2x height and 2x width compared
to our original starting point), using conv4 3 instead
of conv5 3 features. In VGG16’s scheme for naming
layers, conv4 3 is the 10th layer, and conv5 3 is the
13th layer in the CNN. We expected that the accuracy
of R-CNN with conv4 3 would be slightly lower than
R-CNN with conv5 3, but as we show in Table 2 that
the accuracy is higher with conv4 3 by 5.5, 9.4, and
12.4 percentage-points for easy, medium, and hard
detections. Cumulatively, the improvement in accu-
racy from conv5 3 with 1000x302 images to conv4 3
with 2000x604 images is a whopping 12.6, 24.9, and
25.0 percentage-points for easy, medium, and hard,
respectively.
How does further reducing the CNN’s depth af-
fect accuracy? We initially considered using the ear-
lier layers of VGG16 as input to the Region Proposal
Network. But, earlier layers in VGG16 have been
downsampled less, so their activations have a larger
height and width. We found that the off-the-shelf
implementation of RPN comes to dominate the end-
to-end computation time with very large height and
width input grids. Besides depth, one of the differ-
ences between VGG16 and AlexNet is that AlexNet
downsamples more aggressively in the early layers –
for example AlexNet has stride=4 in the conv1 layer
(4x downsampling), while the conv1 layer of VGG16
has stride=1 (no downsampling). So, to evaluate this
question of how using shallower (<10 conv layers)
network impacts accuracy, we use AlexNet instead
of VGG16. We use conv5 (5th layer) activations as
input to the R-CNN region-proposal and classifica-
tion branches, and we report the results in Table 2.
With resolution of 2000x604 for both AlexNet-conv5
and VGG16-conv4 3, the VGG16-based configura-
tion delivers significantly higher accuracy on easy,
medium, and hard detections in Table 2. We have
additional memory available when running AlexNet
with 2000x604 input images, so we now try upsam-
pling the AlexNet input images to 5000x1510. In this
configuration, on the easy detections, AlexNet with
5000x1510 input is within 0.5 of a percentage-point
of our best VGG16-based result so far. On medium
and hard categories, VGG16 conv4 3 with an input
resolution of 2000x604 delivers higher accuracy than
AlexNet with 2000x604 or 5000x1510 input images.
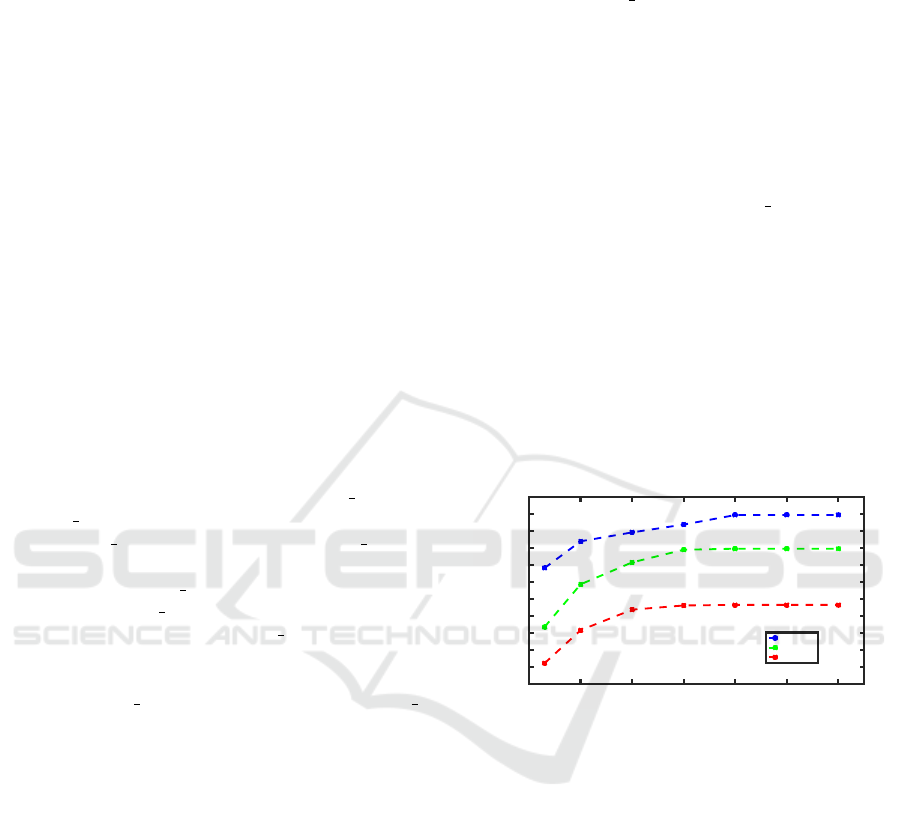
We also conduct a sweep of input image sizes ap-
plied to an AlexNet-based R-CNN model that uses
conv5 features. We show the results of this sweep
in Figure 2. We observe that KITTI car detection
accuracy steadily climbs from a baseline resolution
of 1000x302 to a plateau at resolution 5000x1510.
Beyond this resolution, we have not observed fur-
ther accuracy improvements at larger sizes such as
6000x1811 or 7000x2133.
1000 2000 3000 4000 5000 6000 7000
Image width (pixels)
45
50
55
60
65
70
75
80
85
90
95
100
Average precision (%)
easy
medium
hard
Figure 2: Evaluation of how input resolution affects accu-
racy on KITTI car detection. In this configuration, we use
AlexNet conv5 as input features to the R-CNN branches.
7 FURTHER IMPROVEMENTS
7.1 Context Windows
Chen et al. (Chen et al., 2015b) proposed context win-
dows as a way to include information from adjacent
pixels of a proposed bounding box. A context window
is a bounding box that is scaled up from the original
bounding box proposal of the RPN network. In the
experiments with context window, in addition to the
original R-CNN branch, an extra R-CNN branch
is added that trains on the features extracted from
context window. The original R-CNN features and
the context R-CNN features are concatenated before
classification. We add a context branch in addition to
Shallow Networks for High-accuracy Road Object-detection
37
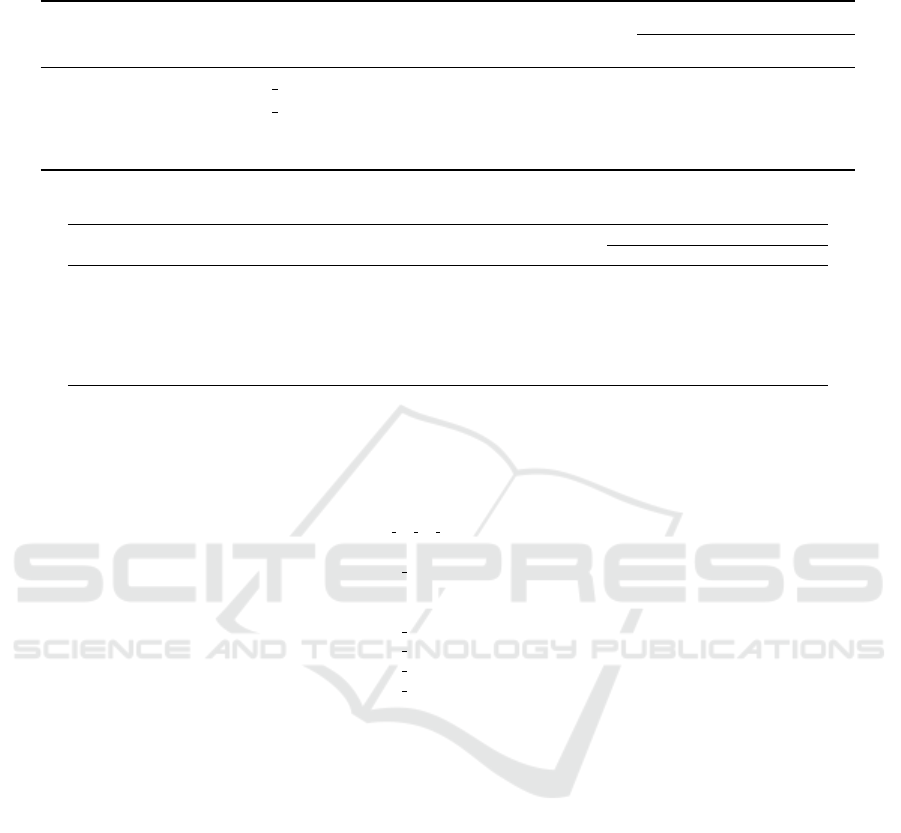
Table 2: Impact of CNN depth on accuracy. Conventional wisdom would suggest that deeper representations would produce
higher accuracy, but we find otherwise. AP numbers are for car detection on the KITTI dataset.
AP
CNN Architecture Conv layer name (depth) Input image resolution Easy Medium Hard
VGG16 conv5 3 (13) 2000x604 87.4 78.5 64.9
VGG16 conv4 3 (10) 2000x604 92.9 87.9 77.3
AlexNet conv5 (5) 2000x604 86.7 71.6 56.1
AlexNet conv5 (5) 5000x1510 92.4 82.5 68.2
Table 3: Impact of anchor box shape on accuracy. These results use AlexNet conv5 features.
DNN architecture Input resolution Anchor shape selection scheme AP
Easy Moderate Hard
AlexNet 1242x375 Default shape 70.37 54.44 46.33
AlexNet 1242x375 K-Means 76.12 59.29 47.38
AlexNet 2500x755 Default shape 84.12 72.14 58.29
AlexNet 2500x755 K-Means 83.27 71.43 62.42
AlexNet 5000x1510 Default shape 91.33 84.52 69.90
AlexNet 5000x1510 K-Means 91.44 85.98 70.04
Table 4: Summary of results on KITTI (Geiger et al., 2012) car detection. All of our results are based on Faster R-CNN. To
our knowledge, all of the related work discussed in this table also uses a version of R-CNN.
AP
Source CNN
Architecture
Feature layer
(Depth)
Input
resolution
Context
window
Easy Medium Hard
SDP+CRC (Yang et al.,
2016)
VGG16 conv3 3, 4 3, 5 3
(7,10,13)
multiple no 90.3 83.5 71.1
Mono3D (Chen et al.,
2016)
VGG16 conv5 3 (13) not reported yes 92.3 88.7 79.0
ours VGG16 conv5 3 (13) 1000X302 no 80.25 62.96 52.3
ours VGG16 conv5 3 (13) 2000X604 no 87.35 78.49 64.93
ours VGG16 conv4 3 (10) 2000X604 no 92.9 87.9 77.3
ours VGG16 conv4 3 (10) 5000x1510 no out of memory
ours AlexNet conv5 (5) 1000X302 no 67.5 49.44 38.9
ours AlexNet conv5 (5) 2000X604 no 86.7 71.6 58.1
ours AlexNet conv5 (5) 5000x1510 no 92.4 82.5 68.2
ours AlexNet conv5 (5) 1000X302 yes 71.58 51.13 40.9
ours AlexNet conv5 (5) 2000X604 yes 86.98 74.32 60.83
ours AlexNet conv5 (5) 5000x1510 yes 94.7 84.8 68.3
the usual R-CNN branch with a spatial bounding box
scaling of 1.5. When applying the context window to
an AlexNet-based R-CNN configuration, we find that
the accuracy of all the categories improve as shown
in Table 4. The improvement is significant in small
image sizes and provides diminishing returns as we
scale up the input image size.
7.2 Optimal Anchor-box Shape
In (Ren et al., 2015), default anchor shapes are arbi-
trarily chosen by reshaping a 16 ×16 square box by
3 scales and 3 aspect ratios. But is there a better way
to choose anchor shapes for input images and target
objects? Intuitively, we want the anchors to have sim-
ilar shapes with the ground truth bounding boxes. The
shape of a bounding box can be characterized by its
width w and its height h. The width and height dis-
tribution of the car object in the KITTI training data
set is plotted in Fig. 3(a). The problem of choosing
the ”most similar” k anchor shapes can be formulated
as the following: given a set of ground truth bound-
ing box shape observations {(w
i
,h
i
)}, find k anchors
such that the sum of the distance (in the shape space
of (width,height)) between each ground truth box to
its nearest anchor is minimized. This problem can be
effectively solved by K-means. The optimal anchor
shapes are plotted in Fig. 3(b). These anchors are op-
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
38

(a) Distribution of
bounding box shapes
of cars in the KITTI
dataset
(b) 9 Anchor box
shapes (white crosses)
selected by K-Means
Figure 3: Bounding box shape distribution of the car ob-
ject in the KITTI dataset is plotted on the left. 9 anchor
shapes computed by K-Means are plotted in the right figure
as white crosses.
timized specifically for the car category, but the idea
of optimizing anchors by considering ground truth
bounding box statistics can be generalized to multi-
category object detection as well.
We tested the AlexNet-based Faster R-CNN’s de-
tection accuracy with different anchor box selection
schemes, and the result is shown in Table 3. We fix
the number of anchors to be 9. From the bounding
box shapes of cars in the training data set, we used K-
Means to select 9 optimal anchor boxes. As compari-
son, we used a set of default anchors with 3 scales and
3 aspect ratios as in (Ren et al., 2015). When image
width is 1242, using the K-Means selected anchors
improves AP significantly comparing with the default
anchors. When the image width is 2500, we could
see that AP with default shapes are slightly better for
easy and moderate category, but using K-Means se-
lected anchors still improves AP for the hard category
by 4 percentage points. As we further scale the im-
age width to 5000, the performance gain saturates, we
still observe some improvement by using K-Means
selected anchors. We have not yet combined context
windows with our anchor box improvements, but it
is possible that this combination will yield a further
improvement in accuracy.
8 DISCUSSION
We show the precision-recall curve for our KITTI
car detection in Fig. 4(a). We used AlexNet-conv5
with a context window and input image resolution of
5000x1510, as in the final row of Table 4. We ob-
serve that the precision of the easy category is very
high even at very high recall. However, the precision
in the hard category suffers at high recall. Improv-
ing the precision of results on the hard category with
our method will be a target of future work. We show
a few examples of success and failure modes in the
hard category in Fig 5. In Fig 5(a), the model suc-
cessfully predict a highly occluded car while in Fig
5(b) the predicted bounding box encompass two cars
that are adjacent to each other. In Fig 5(c), the pre-
dicted bounding box enclose a visible car but com-
pletely misses the car that is truncated. The precision-
recall curve using the conv4 3 features of VGG16 is
shown in Fig.4(b). The precision at high recall for the
hard category improves significantly. The inference
time using AlexNet conv5 layer with input image size
of 5000x1510 and VGG16 conv4 3 layer with input
image size of 2000x604 is 0.34s and 0.6s respectively.
Inference times for other published high accuracy
methods on the KITTI dataset are 3s for 3DOP (Chen
et al., 2015b) and 0.4s for SDP+CRC (Yang et al.,
2016).
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Precision
Recall
Car
Easy
Moderate
Hard
(a) Precision-recall curve
for the AlexNet network
with context window. The
input image size is 5000.
The conv5 features are
used in this experiment.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Precision
Recall
Car
Easy
Moderate
Hard
(b) Precision-recall
curve for the VGG16
network without con-
text window. The input
image size is 2000. The
conv4 3 features are
used in this experiment.
Figure 4: Precision vs. recall curve for KITTI’s car detec-
tion system.
(a) Success. (b) Predicting
one box for two
adjacent cars.
(c) Failure
Figure 5: Examples of success(a) and failure modes(b,c) in
the hard category using AlexNet conv5 with a context win-
dow and input resolution of 5000x1510 pixels. The green
boxes show the ground truth label of heavily truncated car.
In (a), the model successfully predict a highly occluded car.
In (b), the predicted bounding box encompass two cars that
are adjacent to each other. In (c), the predicted bounding
box enclose a visible car but completely misses the car that
is truncated.
9 CONCLUSIONS
In summary, we have shown that shallow networks
perform well in achieving high accuracy on detect-
ing cars in the road. We have shown that input image
resolution has a large impact on the accuracy of car
detection using the faster R-CNN network. For very
deep models, shallow layers can (surprisingly) pro-
Shallow Networks for High-accuracy Road Object-detection
39

vide higher accuracy than the later convolutional lay-
ers deep in the network. Shallow models like AlexNet
can achieve high accuracy when the input image is
upsampled. In addition, we have used an anchor box
selection method and context window to further en-
hance car detection accuracy. We believe that our
findings will inspire the research community to eval-
uate shallow models for achieving high accuracy on
object detection tasks.
ACKNOWLEDGMENTS
Khalid Ashraf was supported by the National Sci-
ence Foundation under Award number 125127. We
thank Kostadin Ilov for many help with computational
hardware. Thanks to Ross Girshick for comments on
some initial results. Thanks to Fan Yang and Kaustav
Kundu for clarification on their results.
REFERENCES
Chen, C., Seff, A., Kornhauser, A., and Xiao, J. (2015a).
Deepdriving: Learning affordance for direct percep-
tion in autonomous driving. In CVPR.
Chen, X., Kundu, K., Zhang, Z., Ma, H., Fidler, S., and
Urtasun, R. (2016). Monocular 3d object detection
for autonomous driving. In CVPR.
Chen, X., Kundu, K., Zhu, Y., Berneshawi, A., Ma, H., Fi-
dler, S., and Urtasun, R. (2015b). 3d object proposals
for accurate object class detection. NIPS.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). ImageNet: A large-scale hierarchical
image database. In CVPR.
Erhan, D., Szegedy, C., Toshev, A., and Anguelov, D.
(2014). Scalable object detection using deep neural
networks. In CVPR.
Everingham, M., Gool, L. V., Williams, C. K. I., Winn,
J., and Zisserman, A. (2010). The pascal visual ob-
ject classes (voc) challenge. International Journal of
Computer Vision (IJCV).
Felzenszwalb, P., Girshick, R., McAllester, D., and Ra-
manan, D. (2010). Object Detection with Discrimi-
natively Trained Part Based Models. PAMI.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In CVPR.
Girshick, R. (2015). Fast r-cnn. In ICCV.
Girshick, R. B., Donahue, J., Darrell, T., and Malik, J.
(2014). Rich feature hierarchies for accurate object
detection and semantic segmentation. In CVPR.
He, K., Zhang, X., Ren, S., and Sun, J. (2014). Spatial
pyramid pooling in deep convolutional networks for
visual recognition. arXiv:1406.4729.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep resid-
ual learning for image recognition. arXiv:1512.03385.
Hillel, A. B., Lerner, R., Levi, D., and Raz, G. (2012). Re-
cent progress in road and lane detection: a survey. Ma-
chine Vision and Applications.
Huval, B., Wang, T., Tandon, S., Kiske, J., Song, W.,
Pazhayampallil, J., Andriluka, M., Rajpurkar, P.,
Migimatsu, T., Cheng-Yue, R., Mujica, F., Coates,
A., and Ng, A. Y. (2015). An empirical evaluation
of deep learning on highway driving. arXiv preprint
arXiv:1504.01716v3.
Iandola, F. N., Moskewicz, M. W., Ashraf, K., Han, S.,
Dally, W. J., and Keutzer, K. (2016). Squeezenet:
Alexnet-level accuracy with 50x fewer parameters and
<1mb model size. arXiv:1602.07360.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
ageNet Classification with Deep Convolutional Neu-
ral Networks. In NIPS.
Lin, M., Chen, Q., and Yan, S. (2013). Network in network.
arXiv:1312.4400.
Rajpurkar, P., Migimatsu, T., Kiske, J., Cheng-Yue, R., Tan-
don, S., Wang, T., and Ng, A. (2015). Driverseat:
Crowdstrapping learning tasks for autonomous driv-
ing. arXiv preprint arXiv:1512.01872v1.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In NIPS.
Sermanet, P., Eigen, D., Zhang, X., Mathieu, M., Fergus,
R., and LeCun, Y. (2014). Overfeat: Integrated recog-
nition, localization and detection using convolutional
networks. In ICLR.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv:1409.1556.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2014). Going deeper with convolutions.
arXiv:1409.4842.
Szegedy, C., Reed, S., Erhan, D., , and Anguelov, D.
(2015). Scalable, high-quality object detection.
arXiv:1412.1441 (v1).
Xiang, Y., Choi, W., Lin, Y., and Savarese, S. (2015). Data-
driven 3d voxel patterns for object category recogni-
tion. In CVPR.
Yang, F., Choi, W., and Lin, Y. (2016). Exploit all the lay-
ers: Fast and accurate cnn object detector with scale
dependent pooling and cascaded rejection classifiers.
In CVPR.
Zhu, Y., Urtasun, R., Salakhutdinov, R., and Fidler, S.
(2015). segdeepm: Exploiting segmentation and con-
text in deep neural networks for object detection. In
CVPR.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
40
