
Graphics Processing Units for Constraint Satisfaction
Malek Mouhouband and Ahmed Mobaraki
Dept. of Computer Science, Univ. of Regina, Regina, Canada
Keywords:
Constraint Satisfaction, Graphics Processing Units, Parallel Computing.
Abstract:
A Constraint Satisfaction Problem (CSP) is a powerful formalism to represent constrained problems. A CSP
includes a set of variables where each is defined over a set of possible values, and a set of relations restricting
the values that the variables can simultaneously take. There are numerous problems that can be represented
as CSPs. Solving CSPs is known to be quite challenging in general. The literature poses a great body of
work geared towards finding efficient techniques to solve CSPs. These techniques are usually implemented
in a system commonly referred to as a constraint solver. While many enhancements have been achieved over
earlier ones, solvers still require powerful resources and techniques to solve a given problem in a reasonable
running time. In this paper, a new parallel-based approach is proposed for solving CSPs. In particular, we
design a new CSP solver that exploits the power of graphics processing units (GPU), which exist in modern
day computers, as an affordable parallel computing architecture.
1 INTRODUCTION
A Constraint Satisfaction Problem (CSP) is a math-
ematical formalism used for representing a variety
of constrained problems ranging from scheduling to
bioinformatics (Dechter, 2003). More formally, a
CSP includes a set of variables, each defined on a do-
main of finite and discrete values, and a set of con-
straints restricting the values tha the variables can si-
multaneously take. A solution to a CSP is a set of
assignments of values to variables such that all con-
straints are satisfied. A CSP is known to be a NP-
hard problem and requires a solving algorithm of ex-
ponential time cost. Therefore, given a CSP, one usu-
ally needs advanced solvers and techniques to find
one or more feasible solutions (Mackworth, 1977;
Haralick and Elliott, 1980; Dechter, 2003; Bessi`ere
et al., 2005; Lecoutre and Tabary, 2008; Balafoutis
and Stergiou, 2010; Mouhoub and Jashmi, 2011; Ab-
basian and Mouhoub, 2016). There are several sys-
tems that are developed specifically for solving CSPs
(Lecoutre and Tabary, 2008). Such systems have been
developed in many different manners to meet the re-
quirements of different CSP problems. Still, most of
the systems suffer some limitations with regards to
how fast they can find a solution. Most solvers are
dedicated to run on personal computers. This means
they run in sequential order until a solution is found,
if it exists. This becomes more challenging when the
problem has a very large number of variables with a
large domain size. Even though there are several im-
provements that have been proposed to enhance the
performance of CSP solvers (Bessi`ere et al., 2005;
Lecoutre and Tabary, 2008; Balafoutis and Stergiou,
2010; Mouhoub and Jashmi, 2011; Abbasian and
Mouhoub, 2016), there are still some difficulties with
hard to solve problems. One well-known improve-
ment is to build a parallel CSP solver that uses mul-
tiple processors. Such an idea performs very well as
long as the user has the ability to acquire powerful
machines. Besides, such machines often come with
unaffordablecost. Another suggested idea is to imple-
ment a parallel CSP solver that takes advantage of the
multi-core processor of the personal computer plat-
form. This approach seems very promising, as it only
requires a personal computer. However, the system
developer would need to maintain balance within the
multi-core processor usability. That is to say, while
an application is using multiple cores, this application
would be required to assign tasks to each of the cores
in such way all of them are used equally.
In this paper, we propose a new GPU-based sys-
tem for solving CSPs. This is achieved by adopting
the CUDA framework (Cook, 2012). CUDA is a pro-
gramming platform that was developed by NVIDA to
allow programmers to use a NVIDIA Graphics Pro-
cessing Unit (GPU). As a programmable and general-
purpose architecture, GPU can be purchased as cheap
as fifty dollars. Moreover, a GPU outperforms the
Central Processing Unit (CPU), in various regards.
Mouhoub M. and Mobaraki A.
Graphics Processing Units for Constraint Satisfaction.
DOI: 10.5220/0006214806530657
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 653-657
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
653

For example, while the CPU often involves up to
16 cores, GPU can have thousands cores due to the
fact that GPU has been developed to work as a paral-
lel computing architecture, mainly for image render-
ing and other graphics and media computations. An-
other advantage of using GPU as a parallel platform is
that NVIDIA has introduced a new programming lan-
guage called CUDA C, which is an extended version
of C language, to help developers monopolize all the
resources of the GPU without having to learn a new
programming language. The CUDA platform will be
responsible for scheduling the threads and avoiding
any misbalancing which could lead to starvation.
The rest of the paper is organized as follows.
First, Section 2 offers background information about
CUDA, along with some details for the advantages of
using this new computing platform. Then, a descrip-
tion of the proposed system for solving CSPs with a
GPU is presented in Section 3. Finally, concluding
remarks and future works are reported in Section 4.
2 COMPUTE UNIFIED DEVICE
ARCHITECTURE (CUDA)
The GPU has been designed to relieve the CPU from
the highly computation processes. The GPU has been
responsible for graphics processing like image render-
ing. This is why it comes with a large number of tran-
sistors which are mostly dedicated for data process-
ing, in comparison to the CPU which requires more
processing control and caching the memory. More-
over, GPU memory has a higher bandwidth than CPU
which speeds up the performance of the arithmetic
operations on the data. The reason for this is because
the main task of the GPUs is to execute the same op-
erations on a larger number of data, which is what the
image rendering is about. However, CPUs are general
architecture designed to execute all types of functions.
In the image rendering processing, or any other graph-
ics processing, the main idea is to divide the problem
data into smaller blocks in which a block can perform
the same work on the sub-problem. Thus, any prob-
lem that processes a repeatedly arithmetic operation
on a larger number of data can be partitioned into
a smaller size and tackled with as independent from
other partitions of the problem as long as the parti-
tioned data elements are independent from each other.
In 2006, NVIDIA announced a new parallel comput-
ing architecture called Compute Unified Device Ar-
chitecture, or CUDA (Cook, 2012). It exploits the
parallelism of the GPU hardware to its highly compu-
tation for solving highly computational problem out
the field of graphics. In contradiction with CPU,
CUDA architecture would perform parallel comput-
ing work in a more professional way than CPU. Also,
NVIDA has developed a software programming envi-
ronment that allows the developers to use it for im-
plementing their applications with a CUDA C that
is an extension programming language of the C Lan-
guage. One of the obstacles of a multicore processor
is that developers need to develop an application that
not just uses the multicore technology in the CPU,
but also maximizes the benefits of the parallel com-
putation to its high level to reach the top speedup that
can be achieved by the multicore processor. Still, this
requires a lot of programming experience and under-
standing of the CPU architecture. These difficulties
have been tackled with CUDA by introducing the new
programming model with instructions sets based on
the C programming language. Developers who are
not familiar with the CUDA platform can still perform
well in programming with CUDA C and reach a very
high leverage of the GPU parallel computing ability.
A developer needs only to write the kernel that will
run on the GPU, and the CUDA platform will execute
this kernel on all of the elements of the data. CUDA
C also allows the users to write a heterogeneous code
that runs on the CPU and GPU in the same file. The
code that concerns the CPU called host code while the
part that runs on the GPU is called the device code. In
CUDA C, there are a few new instructions that are
added to the extension of C programming language.
ThreadIdx is the keyword for accessing the current
thread ID. It is used to direct the specific thread work.
In Figure 1, a sample code, for example, shows
how to add two vectors and store the results in a third
one. The developer only needs to write two functions;
one that will be executed on the CPU and will be re-
sponsible for copying the data from the from CPU
memory to GPU memory, triggering the kernel, syn-
chronizing, then copying back the result form device
memory to the CPU memory. This code is written in
the main function and it is executed only once. While
in the Kernel section, the code will run equal to the
number of threads that are already specified by the
host code in the many function when the kernel is trig-
gered. In this example, the thread number is equal to
the number of array elements. Each thread will ac-
cess different elements in the array of A and adds it to
the correspondent element in array B, then store the
result in the correspondent element in array C. After
the kernel function is complete, the main function of
the host will be to direct the CPU to copy back the
elements of array C from the device memory to the
CPU memory, and the program will terminate.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
654

// Kernel definition
__global__ void VecAdd(float* A,
float* B,
float* C)
{
int i = threadIdx.x;
C[i] = A[i] + B[i];
}
int main()
{
...
// Kernel invocation with N threads
VecAdd<<<1, N>>>(A, B, C);
...
}
Figure 1: Vectors Addition in CUDA C language.
3 PROPOSED SYSTEM
3.1 System Overview
Our proposed system is composed of four major com-
ponents that are running on the same local machine
or platform. The components are Problem, XCSP
Parser (Lecoutre and Tabary, 2008), Consistency Al-
gorithm (Dechter, 2003; Bessi`ere et al., 2005), and
finally GPU Solver. Each one of them, except Prob-
lem, performs a different task. The system is dis-
cussed in more details in the next subsection. The
main component of the whole system is the Problem
class. This latter is provided with the basic function-
alities that are required to create, manage, and find
the solution for a CSP. These functionalities are: cre-
ate a CSP, add and remove variables, add and remove
constraints and find solutions. It is also provided with
the ability to retrieve a CSP data that is stored in an
XML file, parse them, and feed that data to the prob-
lem class. In addition, the Problem class can also run
a local consistency algorithm on a problem in order to
trim the CSP variables domain before submitting it to
the GPU Solver component. The Consistency com-
ponent is composed of two types of consistency tech-
niques: arc (Dechter, 2003; Bessi`ere et al., 2005) and
path consistency (Bessi`ere, 1996) algorithms. Both
of them are concrete classes that implement the inter-
face class called Consistency. Consistency interface
defines the basic attributes and methods of local con-
sistency algorithms. The most important here, the in-
terface declares a function called run in which the tar-
get algorithm will be triggered over the CSP. There-
fore, both of the implementations, or any other future
classes, must implement this function. At the concrete
classes, arc and path, the corresponding technique is
implemented. Thus, when the consistency function
of the problem class is invoked, one of these imple-
mentations is triggered based on the choice given by
the user. The GPU Solver is a new implementation
that is proposed to improve the CSP solver system by
using CUDA architecture for parallel computing. Us-
ing the Cudafy library, we can create several system
running threads that match the number of all differ-
ent locally consistent variable assignments that can
be generated by a given CSP problem. Each thread
will find the corresponding assignment for the vari-
ables based on its identification number that is as-
signed to each thread by the GPU. Certainly, each
GPU has a maximum number of threads that can
be used. Those variables considered in the process
of generating the combinations are called partitioned
variables. Consequently, the unselected variables are
called unpartitioned variables, and are assigned to a
value from there domains sequentially using the back-
tracking algorithm following a given constraint prop-
agation strategy (Haralick and Elliott, 1980). The
GPU Solver class is composed of two main functions.
The first is FLABT, which implements the backtrack-
ing algorithm with Full Look Ahead as a propagation
strategy. The other function is FCBT, which imple-
ments the backtracking algorithm with the Forward
checking strategy. Either of them is to be invoked
from function problem. FindSolution and the selec-
tion will be based on the user choice that is pro-
vided as a parameter for this function. Based on the
CSP data, the GPU Solverwill instantiate an adequate
number of threads that is equal to number of all the
combinations of the given CSP as long as it does not
exceed the maximal number threads that can be cre-
ated by the GPU. In case a CSP combination number
is larger than the maximal number of threads, some of
these variables’ domains will be partitioned while the
rest will be solved using the backtracking algorithm.
Once the required number of threads is specified, the
CSP problem data will be copied from the CPU mem-
ory to the GPU memory, and then the correspondence
kernel will be invoked to run on the GPU. The sys-
tem needs to synchronize now until all the executions
of the GPU are performed. Once this step is com-
plete, the system retrieves the results from the GPU
memory and frees all the resource allocations being
used by the GPU, and the next step will be storing
the results in the problem class data structure, namely
solutions. However, this is how the GPU Solver per-
forms on finding the solution, but not how it is done
on the GPU kernel. For the FLABT kernel, the data
required to solve a CSP is domains, constraints, vari-
Graphics Processing Units for Constraint Satisfaction
655
ables indexes, in additions to the number of threads.
There are as many versions of all the variables’ do-
mains as the number of threads so that each of the
threads can access a separate version of all the vari-
ables’ domains and update them separately. The first
step is that each thread finds a unique combination
based on its ID number that is assigned by the GPU.
If all the combinations of the given CSP can be gener-
ated by the threads, each thread will invoke a function
called a propagation function for testing the legibility
of this solution using the constraints table of the CSP.
Thus, the kernel function will terminate itself at that
level. On the other hand, if the number of threads is
less than the entire combinations, the selected vari-
ables will be assigned via each of the threads, those
assignments are tested through the propagation func-
tion. Only those threads that carry legal combinations
are considered, and all other threads will be termi-
nated. Afterward, the backtracking algorithm com-
bined with a constraint propagation technique, either
forward checking or Full Look ahead, will be exe-
cuted on the rest of threads. The third step after the
completion of backtracking algorithm is to examine
all the threads against the constraints table to find
combinations that satisfy all the constraints.
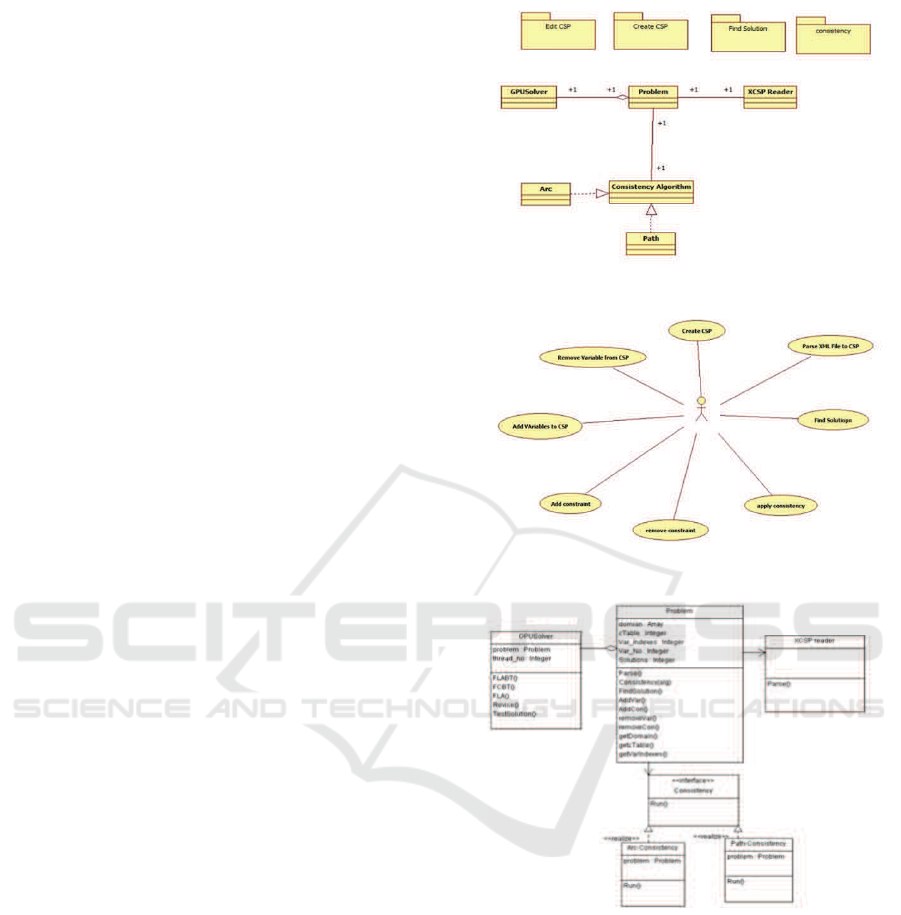
3.2 Software Architecture and
Description
The layout of the system (see Figure 2) consists of two
interfaces, the core system and the hardware. The user
can enter a CSP data via graphics user interface or by
submitting XML file constraints that includes all the
information needed to create a problem. XML Parser
is responsible for parsing the XML file and extracting
the data of the CSP and feeding it to the core system.
The problem data has to be written in a certain format
that is specified in (Lecoutre and Tabary, 2008). Once
a problem has been created, the core system is ready
to be initiated and perform its functionalities over the
problem. The system use cases diagram is depicted in
Figure 3.
As described before, our proposed software im-
plements four main classes: Problem, XCSP parser,
consistency, and GPU Solver. Their tasks are to rep-
resent a CSP problem, reading a problem data from
a file, performing consistency algorithm, and finding
the solution, respectively. The main class is the prob-
lem class, in which all other classes’ functionalities
are accessed. Figure 4 describes all the classes and
the integrations between them.
There are two main functionalities for the systems,
removing inconsistent values and finding the solution
of the problem. The Problem Class implements each
Figure 2: System interaction component.
Figure 3: Use Case Diagram.
Figure 4: Class diagram.
of these functionalities in a function that can be called
from the main class. FindSolution functionality is de-
picted in Figure 4. The function requires a string pa-
rameter and has no value to return since the results
will be stored in an array of two dimensions, namely
solutions. FindSolution will invoke the proper algo-
rithm function of the GPUSolver class depending on
the parameter being passed to the function. There are
two implementations of the backtracking algorithms,
FCBT and FLABT. Each one of the backtracking al-
gorithm functions invoke in turn a different kernel to
run on GPU cores. More specifically, FCBT will in-
voke FindWithFC kerenel, while FLABT will invoke
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
656

the FindwithFLA kernel. The FindSolution function
will pass its class, problem, as a parameter to the
backtracking function in GPUSolver class, and the
backtracking function in turn will copy the problem
data from CPU memory to the GPU memory. Right
now, everything is ready for the kernel to be invoked.
The backtracking function, either FCBT or FLABT,
needs to synchronize until the kernel finishes its work.
The kernel will store all the solutions that are paral-
lelized in a two-dimension array, namely Solutions.
This is the array that will be retrieved from the GPU
memory by the FLADBT function after the CPU has
been synchronized in order for the kernel to finish its
task. Of course, not all the solutions found are legit-
imate. That is why there is another array called Flag,
which holds a flag value for each corresponding solu-
tion.
Our system is an open source programming envi-
ronment produced by NVIDA that allows a developer
to implement a kernel and execute it on the graphics
processing unit. The programming language used is
an extended C language. Cudafy is a library devel-
oped by C# to allow developers to develop their ap-
plications in a high level programming language like
C# and they do not need prior knowledge about the C
language structure or the parallel computing architect.
Still, the application needed to have a NVCC com-
piler to compile and execute the output of the Cuadfy
code. This library target .Net is designed to be used in
the Visual Studio.Net Framework, particularly for C#
programmers, so that the developed application can
be executed, partially not entirely, in a parallel man-
ner.
4 CONCLUSION AND FUTURE
WORK
In this work, we proposed a GPU-based solver for
CSPs. Most of the solvers existing today rely on a
CPU processing to solve a CSP problem. After en-
forcing constraint propagation, the CSP can be com-
posed of locally consistent combinations such that
some of them form a consistent solution. GPU can be
programmed to distribute multiple threads over these
combinations and find which of those combinations
would satisfy the constraints. The GPU is easily pro-
grammable and does not require any advance knowl-
edge for thread scheduling, maintaining, or synchro-
nizing. Finally, the GPU can outperform classic solv-
ing methods by partitioning the CSPs and paralleliz-
ing the threads. This often leads to large savings in
terms of computations. The following will be consid-
ered in the near future: developing a Graphics User
Interface, implementing more constraint techniques
including variable ordering heuristics (Balafoutis and
Stergiou, 2010; Mouhoub and Jashmi, 2011), consid-
ering other forms of paralllel architectures for solv-
ing CSPs (Abbasian and Mouhoub, 2013; Abbasian
and Mouhoub, 2016), and generalizing the system to
adopt other types of NVIDIA GPU.
REFERENCES
Abbasian, R. and Mouhoub, M. (2013). A hierarchical par-
allel genetic approach for the graph coloring problem.
Applied Intelligence, 39(3):510–528.
Abbasian, R. and Mouhoub, M. (2016). A new parallel ga-
based method for constraint satisfaction problems. In-
ternational Journal of Computational Intelligence and
Applications, 15(03).
Balafoutis, T. and Stergiou, K. (2010). Conflict directed
variable selection strategies for constraint satisfaction
problems. In Hellenic Conference on Artificial Intel-
ligence, pages 29–38. Springer.
Bessi`ere, C. (1996). A simple way to improve path con-
sistency processing in interval algebra networks. In
AAAI’96, pages 375–380, Portland.
Bessi`ere, C., R´egin, J., Yap, R. H. C., and Zhang, Y. (2005).
An optimal coarse-grained arc consistency algorithm.
Artif. Intell., 165(2):165–185.
Cook, S. (2012). CUDA programming: a developer’s guide
to parallel computing with GPUs. Newnes.
Dechter, R. (2003). Constraint Processing. Morgan Kauf-
mann.
Haralick, R. and Elliott, G. (1980). Increasing tree search
efficiency for Constraint Satisfaction Problems. Arti-
ficial Intelligence, 14:263–313.
Lecoutre, C. and Tabary, S. (2008). Abscon 109: a generic
csp solver. In 2nd International Constraint Solver
Competition, held with CP’06 (CSC’06), pages 55–
63.
Mackworth, A. K. (1977). Consistency in networks of rela-
tions. Artificial Intelligence, 8:99–118.
Mouhoub, M. and Jashmi, B. J. (2011). Heuristic tech-
niques for variable and value ordering in csps. In
Krasnogor, N. and Lanzi, P. L., editors, GECCO,
pages 457–464. ACM.
Graphics Processing Units for Constraint Satisfaction
657
