
Modelling Behavioural Requirements and Alignment with Verification in
the Embedded Industry
Grischa Liebel
1,2
, Anthony Anjorin
3
, Eric Knauss
1,2
, Florian Lorber
4
and Matthias Tichy
5
1
Chalmers University of Technology, Gothenburg, Sweden
2
University of Gothenburg, Gothenburg, Sweden
3
Universit
¨
at Paderborn, Paderborn, Germany
4
Aalborg University, Aalborg, Denmark
5
University of Ulm, Ulm, Germany
Keywords:
Requirements Modelling, Verification, Test Case Generation, Empirical Software Engineering, Model-based
Engineering, Model-Driven Engineering.
Abstract:
Formalising requirements has the potential to solve problems arising from deficiencies in natural language
descriptions. While behavioural requirements are rarely described formally in industry, increasing complexity
and new safety standards have renewed the interest in formal specifications. The goal of this paper is to explore
how behavioural requirements for embedded systems can be formalised and aligned with verification tasks.
Over the course of a 2.5-year project with industry, we modelled existing requirements from a safety-critical
automotive software function in several iterations. Taking practical limitations and stakeholder preferences
into account, we explored the use of models on different abstraction levels. The final model was used to
generate test cases and was evaluated in three interviews with relevant industry practitioners. We conclude
that models on a high level of abstraction are most suitable for industrial requirements engineering, especially
when they need to be interpreted by other stakeholders.
1 INTRODUCTION
Requirements Engineering (RE) has a substantial im-
pact on the success of software projects (Procac-
cino et al., 2002). Using natural language to spec-
ify requirements poses numerous challenges includ-
ing avoiding ambiguity, inconsistencies, and contra-
dictions. Perhaps even more problematic is the task of
keeping such informal requirements in sync with cor-
responding acceptance tests and implementation arte-
facts. Textual natural language requirements specifi-
cations are, nonetheless, still the norm in the embed-
ded industry (Sikora et al., 2011; Graaf et al., 2003).
A viable approach with the potential to solve at
least some of these problems is to replace informal
requirements with formal models, e.g., to enable au-
tomated analyses such as consistency checks and test
generation. Although expressing requirements as for-
mal models has been studied for a long time, e.g., in
(Lubars et al., 1993), widespread adoption of formal
methods in industry has not yet been achieved (Wood-
cock et al., 2009). Increasing complexity and new
standards have, however, led to renewed interest in
model-based requirements engineering in industry, as
seen with joint industry-academia projects targeting
model-based requirements engineering, such as CE-
SAR (CESAR Project, 2011) or CRYSTAL (CRYS-
TAL Project, 2013). To improve the adoption of for-
mal requirements models in industry, we report in
this paper on our experience in an industry-academia
project with the aim of exploring requirements mod-
elling. Our work was guided by the following two
research questions.
RQ1: How can formal models be used to capture
real-world requirements?
RQ2: Do formal models for requirements provide
added value in practice? What are the challenges
involved?
Over the course of 2.5 years, we created several
formal models of the requirements of a safety-critical
Adjustable Speed Limiter (ASL) function from a real-
life automotive requirements specification. One of
the models was used for the automated generation of
Liebel G., Anjorin A., Knauss E., Lorber F. and Tichy M.
Modelling Behavioural Requirements and Alignment with Verification in the Embedded Industry.
DOI: 10.5220/0006205604270434
In Proceedings of the 5th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2017), pages 427-434
ISBN: 978-989-758-210-3
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
427

test cases, which we compared to existing, manually
specified test cases, provided by our industrial part-
ner. We complement our own reflections with data
collected in multiple interviews and workshops con-
ducted together with relevant professionals at our in-
dustrial partner. While we explored different formal
notations, we report here on the use of timed automata
(TA) (Alur and Dill, 1994) only, as most resources
were spent on creating these models.
2 RESEARCH METHOD
The study presented in this paper follows the de-
sign science research paradigm, roughly following the
guidelines of Wieringa (Wieringa, 2014) to structure,
plan, and execute the study. The two main activities in
design science research are the design and the inves-
tigation of an artefact in its context (Wieringa, 2014).
These activities take place in two iterative cycles, the
design cycle and the evaluation cycle. The outcome of
each iteration is an evaluated artefact, a requirements
model in the case of our study.
The design problem in our case was to create for-
mal models of existing requirements that correctly
represent these and enable further analyses. For
each of the iterations, the corresponding knowledge
questions were therefore “Does the artefact (require-
ments model) correctly represent the textual require-
ments?” and “What kind of analyses are enabled by
the model?”.
Our investigation was exploratory in nature. The
project sponsor rather wanted us to sketch different
solutions and possibilities using formal requirements
models.
The context of the design science project is the
current process at the case company, an automotive
original equipment manufacturer (OEM), and a pro-
vided demonstrator system. Furthermore, the align-
ment of RE with verification was identified as an im-
portant aspect during initial discussions.
In this study, the model resulting from each itera-
tion apart from the final iteration was evaluated ana-
lytically, without collecting empirical evidence. That
is, we evaluated whether we succeeded in express-
ing the entire textual requirements specification as a
model or not. Furthermore, the models were dis-
cussed multiple times in presentations with experts
from the case company. The focus of these discus-
sions was mainly to evaluate the adequacy and to plan
the direction for future iterations.
The final artefact was evaluated empirically using
three interviews with verification engineers at the case
company. The focus of this final evaluation was on
the interaction of the produced artefact with its con-
text. That is, whether the artefact was appropriate in
terms of abstraction, modelling notation, and enabled
analyses, for an industrial application.
2.1 Validity Threats
We applied several measures in order to reduce the
threats to validity in this study as much as possible.
To avoid misinterpretation of concepts and inter-
viewer bias, we discussed and refined the interview
guide
1
for the final iteration among the authors and
conducted one pilot interview.
Selection threats cannot be ruled out as poten-
tial interviewees were selected from our network and
the network of contact persons at the case company.
While this is a potential threat to validity, the inter-
viewees participated on a voluntary basis and were
granted anonymity.
Design science instead aims at middle-range gen-
eralisations (Wieringa, 2014), which only make real-
istic assumptions about the object of study. As the
case company selected a demonstrator system which
they deemed representative for the case company, we
expect that our findings apply to the context of the au-
tomotive domain. However, the low number of evalu-
ation interviews could further limit this generalisabil-
ity.
3 ADJUSTABLE SPEED LIMITER
The Adjustable Speed Limiter (ASL) is an active
safety function of an automobile that automatically
adjusts the current vehicle speed to keep to a target
speed set by the user and can be overridden using the
kickdown pedal. The function is part of the cruise
control functionality that controls the engine and the
brakes of a vehicle.
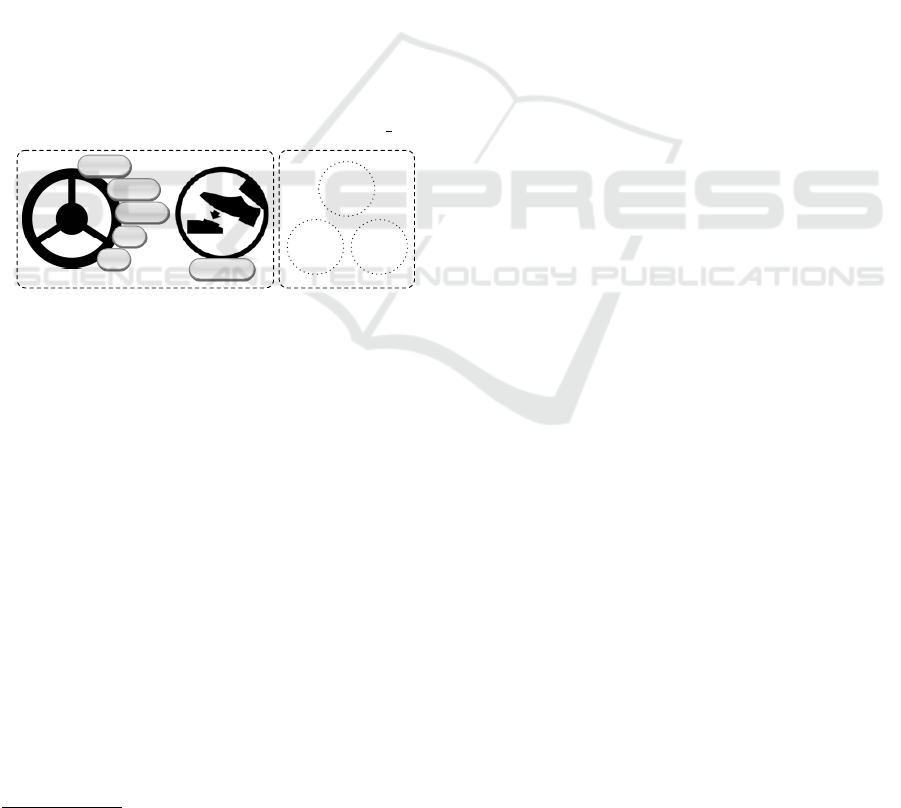
A schematic overview of the controls and vari-
ables of the function is depicted in Fig. 1. Typical
controls comprise a series of buttons that can be at-
tached to the steering wheel (depicted schematically
to the left of Fig. 1 as buttons Off, Resume, Preset,
+, and - on the steering wheel), as well as firmly de-
pressing the accelerator pedal (depicted schematically
to the left of Fig. 1 as a so called kickdown action).
A set of variables (depicted to the right of Fig. 1
as a rectangle containing dotted circles) is used by
the ASL function to store: the current vehicle speed
current, the currently set target speed set, and a pre-
set value for the target speed preset. The expected
1
The interview guide is available at http://
grischaliebel.de/data/research/LAKLT ModTCG.zip.
MODELSWARD 2017 - 5th International Conference on Model-Driven Engineering and Software Development
428
behaviour of the ASL is informally specified in the
following with these controls and variables:
• Pressing Off deactivates the ASL.
• Pressing Resume activates the ASL, which imme-
diately starts adjusting the current vehicle speed to
keep to the target speed. If the target speed set is
0, however, the current vehicle speed current is
first assigned to set before the ASL is activated.
• Pressing Preset has a similar effect, i.e., it acti-
vates the ASL, only that a preset speed preset is
assigned to the target speed set before the ASL is
activated.
• Pressing + (-) either activates the ASL with the
current vehicle speed current as target speed
or, when the ASL is already active, increments
(decrements) set.
• Finally, the ASL can be temporarily deactivated
by firmly depressing the accelerator pedal, re-
ferred to as a kickdown. This function is used,
e.g., to temporarily taking control of the vehicle
speed for overtaking another vehicle. A kickdown
deactivates the ASL and starts a counter. The ASL
is automatically reactivated after a timeout t max.
Resume
+
Preset
Off
Kickdown
current
set
preset
-
current
presetset
Figure 1: Events users can trigger (left) and variables of the
system (right).
For our work on the ASL case study, we were pro-
vided with the following documents by our industrial
partner:
1. A textual requirements specification for the ASL
subsystem in the same detail as would be provided
to a supplier. This specification consisted of 50
pages containing 40 functional (design) require-
ments and numerous requirements describing le-
gal constraints and configuration options.
2. A set of 52 manual
2
system tests, developed man-
ually to test the ASL function.
3. Presentations and other high-level documentation
of the ASL function.
4 RESULTS
In the course of the project we specified multiple
2
This means the tests must be executed manually.
models representing the same requirements but on
different levels of abstraction. Changing the level of
abstraction was mainly driven by our and our stake-
holders’ needs.
4.1 Analyses with Uppaal
With the help of numerous clarifications with a do-
main expert at our industrial partner, we were able to
formalise the provided requirement specification as a
network of timed automata. Our primary goal with
this step was to represent the requirements as faith-
fully as possible, without any simplifications. This
was indeed possible using timed automata as sup-
ported by Uppaal, and resulted in a relatively low-
level network consisting of 13 automata with a total
of 43 states in all automata. While we aimed for hav-
ing a one-to-one mapping between requirements and
single timed automata, this was not always possible
or feasible. For example, requirements addressing the
deactivation of the ASL system had to be incorporated
into all automata addressing ASL activation, as they
had to return to their initial states.
Although our results indicate that timed automata
as a formalism was expressive enough to capture
exactly what was informally specified, the resulting
model was complex and could not be used for any
manual checks including manual reviews and inspec-
tions to check for conformance. This was mainly due
to the large amount of system and external environ-
ment variables that had to be provided and under-
stood, e.g., the different engine and vehicle states.
Apart from having a high complexity in itself,
the resulting model required a suitable environment
model in order to be simulated properly. For example,
information about the automobile being switched on
or off would have been needed. The fact that we did
not have such a model made the requirements model
difficult to use for automated checks. This is an inter-
esting observation for industrial practice as well, as
a supplier would lack environment information in a
similar fashion.
To simplify communication within our team and
make progress towards other goals, we derived a fur-
ther network of timed automata on a medium level of
abstraction.
The medium-level model we obtained consisted of
8 automata and 15 states, and was now better suited
for manual and semi-automated tasks, which require
a deep understanding of the modelled functionality.
We performed semi-automated conformance checks
using the test cases we had, by implementing a simu-
lator in Uppaal by additionally specifying an environ-
ment model.
Modelling Behavioural Requirements and Alignment with Verification in the Embedded Industry
429

4.2 Manual Inspection
To achieve our goal of checking the adequacy of the
provided tests, we derived a final, high-level model
of the requirements, this time as a single timed au-
tomaton with only three states. Concerning consis-
tency, we were able to perform manual inspections
and reviews in the team, discussing how exactly the
requirements are to be interpreted and identifying par-
ticularly confusing aspects. This iterative review and
refinement process identified two issues that were ver-
ified as outdated aspects of the requirements by our
industrial partners.
4.3 Manual Conformance Checks
We were able to manually test the conformance of
our high-level model to the provided tests by convert-
ing the tests to the same formalism as the high-level
model (effectively formalising the test cases as timed
automata). To do this, however, we had to exclude
all tests that covered aspects abstracted away in our
model and were left with 9 tests from an initial 52
. As a comparison, 18 tests could be executed on our
medium-level model, 40 tests on our low-level model,
and 12 tests were entirely out of scope of our require-
ments specification, as they addressed parts not cov-
ered in the provided requirements specification, e.g.,
GUI elements.
Figure 2 depicts one of these 9 provided tests, test-
ing in this case a combination of + and Preset. The
test is also depicted in the UML statechart visual con-
crete syntax and is to be interpreted as follows: the
states are expected states of the System Under Test
(SUT), i.e., if these states do not match then the test
fails. This means that a precondition of the test is that
the SUT is deactivated. Events in the test are stimuli
for the SUT, e.g., the event + simulates a user press-
ing the + button (and the SUT is expected to tran-
sition to Limiting). Conditions such as [set ==
preset] are assertions on the variables of the SUT.
A test passes if it reaches the final state PASS and fails
otherwise (a suitable timeout is used to enforce termi-
nation).
In this manner, we were able to manually verify
that our high-level model conforms to at least these 9
tests. Via this manual conformance check, we were
able to identify and correct “mistakes” in our model,
mainly due to a mismatch between tests and require-
ments, which could also be verified by our industrial
partners.
+
Limiting
Preset [set == preset]
Limiting
PASS
Deactivated
Figure 2: High-level model of a provided test case.
4.4 Mutation-based Test Generation
Our final high-level model was not only simple
enough to enable manual inspections and confor-
mance checks, but could also be handled by Mo-
MuT::TA and used for mutation-based test genera-
tion. Mutation-based test generation involves the cre-
ation of a set of intentionally faulty models, called
mutants, according to a set of fault models. Traces
that lead to situations in which the mutants behave
differently than the original model are then searched
for, and test cases are generated based on these traces.
The resulting test suite guarantees the absence of the
inserted faults, if they run through on a deterministic
SUT.
We performed mutation-based test case genera-
tion using MoMuT::TA as follows:
1. After filtering and formalising all tests that could
be run for the high-level model, this set of tests
was used as an initial “seed” for MoMuT::TA.
This means that the tool is forced to start from
this possibly sub-optimal set of tests and generate
additional tests to achieve full coverage of all mu-
tants. By also performing the test case generation
without the initial seed, one can create a minimal
set of test cases and thus detect whether some of
the initial tests are redundant.
2. The high-level model was supplied to Mo-
MuT::TA as the input model and used to generate
a set of mutants. Note that this set of mutants was
based on general experience with test case gener-
ation and not on specific domain knowledge of the
case study.
3. In our case, MoMuT::TA classified all 9 provided
tests as necessary, and generated an additional 11
tests to achieve full coverage (to kill all generated
mutants).
4. We then inspected these additionally generated 11
tests and their corresponding mutants manually,
compared them with the initially provided 9 tests,
and attempted to understand why they were nec-
essary.
From our comparative analysis, we determined
that the generated tests were largely of comparable
size and complexity as the provided, manually spec-
ified tests, and we were able to identify three main
sources of additionally generated tests:
MODELSWARD 2017 - 5th International Conference on Model-Driven Engineering and Software Development
430

Self-transitions in the Timed Automata. Self-
transitions were implicit in the requirements and were
not tested explicitly, i.e., were completely missing in
the provided tests. The additionally generated tests
for such transitions appear useful and sensible, and
the corresponding mutants represent interesting, test-
worthy cases. 6 tests were generated in total as a result
of such explicit self-transitions in the model.
Missing Combinations. An additional 3 tests were
generated due to missing combinations of certain
events that were simply not covered by the provided
tests. Note that our test generation approach is not
combinatoric, i.e., we did not employ a brute force
combination of all possibilities. This means that in
all 3 of these cases, we could always inspect the cor-
responding mutant to understand why this particular
combination was chosen by the test case generator.
Missing Tests. The 2 remaining tests were gener-
ated for elements in the model that were simply not at
all covered by any provided test. Again the potential
of automatically reacting to changes in the require-
ment model is to be noted here, and not the particular
aspects identified as being missing.
5 EVALUATION
In order to evaluate the resulting TA model and the
generated tests with respect to suitability for industrial
use, we conducted three semi-structured interviews
with professionals at the industrial partner. As the in-
terviewees needed to be able to compare the model
and the generated tests to the current baseline, we
chose subjects from the area of verification on sys-
tem level. The interviews were aimed at answering
the following interview questions which together ad-
dress our second research question RQ2:
IQ1. What would be the potential of model-based re-
quirements and of test case generation to the case
company?
IQ2. Are the tests generated from the TA model com-
parable to existing manual tests?
IQ3. What would be the primary challenges involved
in introducing this technique at the case company?
Interviews started with a short introduction of our
activities, the resulting TA model, and the generated
tests. The remaining questions were grouped into
three categories addressing the generated tests (IQ2),
model-based requirements in general (IQ1 and IQ3),
and the usefulness of potential features of test case
generation for industry (IQ1 and IQ3).
5.1 Potential of Model-based
Requirements and Test Case
Generation
All interviewees stressed that the presented approach
of formalising requirements in an abstract automata
model is highly interesting and relevant to the case
company. One interviewee stated that replacing natu-
ral language requirements with models is “Something
I’m actively working towards today. But it takes a lot
of convincing.”. Similarly, another interviewee stated
“As long as you can create logical requirements, such
a model should be the solution.”.
While we expected the abstract timed automata
model, which we used to generate tests, to be much
too simple and lacking too much information, all in-
terviewees stated that this level of abstraction is in-
deed relevant and useful for system testing. Further-
more, one interviewee mentioned that the existing
manual system tests might even be too detailed, as
they are derived from design requirements and there-
fore contain lots of additional information.
5.2 Generated vs. Manual Tests
Regarding the tests addressing self-transitions in the
automata model, the interviewees stated that these
could be relevant for regression testing. However,
they would have to be automated in order to reduce
the testing effort and would probably not be priori-
tised if test execution must be performed manually. In
fact, multiple interviewees stated that the case com-
pany had such tests in the past, but removed them
due to time constraints once the system became sta-
ble. They all agreed that once test execution can be
fully automated, this class of tests would indeed add
value and should be incorporated again into the test
suite.
The second class of generated tests, combinations
of behaviour tested in the manual tests, was eval-
uated differently by the interviewees. While they
found them generally useful, one interviewee stated
that many of these combinations are tested indirectly
due to setup routines. For example, a test case might
require the ASL function to be active, which requires
a setup that activates this function first. Such a setup
followed by a test case could then be equivalent to one
of the “missing” combinations.
The third class of tests, functionality not at all
tested in the manual tests, was considered very use-
ful by the interviewees. Even though we pointed out
that some of these missing tests might have been re-
moved due to our abstraction, interviewees stated that
especially the feedback that such a test is missing is
Modelling Behavioural Requirements and Alignment with Verification in the Embedded Industry
431

useful. Given this information, verification engineers
can then judge whether it needs to be added, is already
covered on a lower level of abstraction, or is not rele-
vant.
Regarding the issues we found with the existing
requirements and system tests, interviewees stated
that they were all well aware that requirements can
be wrong or outdated. One interviewee stated: “We
report everything that we think is bad with the re-
quirements. But since it is a huge amount of issues,
it is difficult to handle them all.”. However, another
interviewee added that finding these issues could be
useful as it is difficult to identify such mismatches
between tests and requirements “if you only look at
high-level requirements”. You would instead need to
consider “all (detailed) requirements together and see
the whole picture”. Essentially, this quote describes
very well the process we went through in the different
iterations.
One interviewee stated that visualising mutants
that are killed by a test case (which faulty behaviour
it tests) could be very useful in the context of safety-
critical functions. Test cases could then be ranked
according to severity, e.g., according to the critical-
ity level of the tested function. This could help when
prioritising requirements, for coverage analysis, and
for choosing a (small) subset of tests that can be ex-
ecuted manually for given resources. A study show-
ing how visual representations of timed automata mu-
tants can be used for debugging has already been con-
ducted (Aichernig et al., 2014) and the same tech-
nique could also be applied in the case company.
5.3 Challenges of Model-based
Requirements and Test Case
Generation
As challenges the presented approach faces, the in-
terviewees named mainly the effort to create require-
ments models, and industrial tool support. Interest-
ingly, the former challenge is not related to the com-
plexity of creating models and the knowledge to do
so, but concerns rather the costs of formalising exist-
ing requirements. When asked about the challenges of
introducing model-based requirements and test case
generation, one interviewee stated that the challenge
is “First of all, to have the time to do it.”.
Regarding tooling, interviewees stated that it is es-
sential to integrate the chosen modelling tool into the
existing tool chain. Furthermore, professional support
for this tool and test case generation must be provided.
One interviewee mentioned that it could be a prob-
lem to get support from management, stating that it is
difficult “To have the people with the budget aware
of what we get if we do this.”. Another interviewee
mentioned lacking support from developers as an is-
sue, stating that they would not see the problems with
textual requirements: “Not everyone thinks like that.
Especially developers without a testing background,
as you don’t encounter the problems without having
the exactly defined behaviour.”.
None of the interviewees did however express a
concern that formal methods could be difficult to ap-
ply given an engineers’ typical education. This could
be attributed to the fact that many of the engineers
in this domain are used to modelling notations such
as Simulink. This is an interesting result as training
effort is commonly mentioned in the related work as
a challenge in model-driven and model-based tech-
niques, e.g., in (Agner et al., 2013; Hutchinson et al.,
2011; Liebel et al., 2016).
While we were especially concerned with estab-
lishing trust in generated tests, the interviewees did
not share this concern to the same extent. One person
stated that “I’d say from a testing point of view there
are certain trust issues in some places. But generally,
I would say that we are for a model-based approach.
Definitely.”. They did however all agree that it would
be helpful to be able to understand on an abstract level
what is tested by a test case and that visualising mu-
tants could be helpful (and this of course increases
trust in the approach).
6 RELATED WORK
Using models to specify requirements has been ex-
plored extensively over the last decades. In the con-
text of automotive and embedded software, several
studies report on experiences with modelling lan-
guages that prescribe the structure of the requirements
specification. For example, Boulanger and V
ˇ
an de-
scribe a methodology to develop embedded automo-
tive systems, using EAST-ADL and SysML for re-
quirements modelling (Boulanger and V
ˇ
an, 2008).
Similarly, Piques and Andrianarison report on indus-
trial experiences with using SysML in the automotive
domain (Piques and Andrianarison, 2011). Albinet et
al. introduce a similar approach, but use the UML
profile MARTE for real-time systems (Albinet et al.,
2008). All three approaches have in common that the
requirements themselves are expressed in natural lan-
guage and only the structure of the specification is
prescribed by the modelling language.
For expressing requirements as models, differ-
ent languages have been used in the embedded do-
main, for example, formal specification languages as
in (Zave, 1982) and (Broy et al., 1992). Such lan-
MODELSWARD 2017 - 5th International Conference on Model-Driven Engineering and Software Development
432

guages are, however, often aimed at system design
and are on a too detailed level to be considered re-
quirements. In some cases, they could nonetheless be
on a level of abstraction comparable to our first, low-
level requirements model.
An early empirical study by Lubars et al. (Lubars
et al., 1993) also reports that languages such as Entity-
Relationship diagrams, flow diagrams, and object-
oriented models were already commonly used in RE
during the early 90s. The popularity of models at that
time could partly stem from the widespread use of
methods and processes such as the Rational Unified
Process and Structured Analysis, which both include
the use of models during RE. However, a more recent
study by Sikora et al. (Sikora et al., 2011) reports
that practitioners in the embedded industry advocate
a more intensive use of models during RE. The au-
thors attribute this to the automation possibilities that
RE models could offer.
More recently, B
¨
ohm et al. (B
¨
ohm et al., 2014)
used the tool AutoFOCUS3 in an industrial project
to model requirements of a train automation system.
Braun et al. (Braun et al., 2014) use several different
models to express automotive requirements, e.g., goal
models.
Regarding the area of test case generation, timed
automata have been used for test case generation mul-
tiple times. Nielsen and Skou (Nielsen and Skou,
2001) propose a test case generation framework for
timed automata. The UPPAAL tool chain contains
the tool Tron (Mikucionis et al., ) performing online
testing and the tool CoVer (Hessel and Pettersson,
2007) that allows coverage-based offline test genera-
tion from timed automata. However, these approaches
are not mutation-based. Mutation-based test case gen-
eration has been performed on several different for-
malisms, including timed automata (Aichernig et al.,
2013), pushdown automata (Belli et al., 2012), UML
state machines (Aichernig et al., 2015a) and require-
ment interfaces (Aichernig et al., 2015b).
All approaches presented above, academic or not,
have in common that the contribution is the result-
ing model, generated tests, or a discussion thereof. In
contrast to this, we discuss the iterative process using
different languages and levels of abstraction to for-
malise real-life requirements from the automotive do-
main and generate tests from them. Additionally, we
provide empirical evidence in the form of qualitative
data gathered from interviews with industrial practi-
tioners. The focus is therefore on the entire process
and the lessons learned throughout it, in contrast to
single steps in the chain.
7 CONCLUSION AND FUTURE
WORK
In this paper, we reported on the outcome of a 2.5-
year project carried out together with an automo-
tive OEM with the goal of exploring the potential
of model-based requirements engineering in the em-
bedded domain. Over the course of the project, we
created several models on different levels of abstrac-
tions of a real-life, safety-critical requirements spec-
ification. Using timed automata as modelling lan-
guage, we created three different models, going from
the lowest level of abstraction, directly translating the
design requirements, to a single automaton with only
three states. We used this final automaton to gener-
ate test cases and evaluated the overall outcome with
system-level verification engineers at our industrial
partner.
Our evaluation indicates that it is indeed possible
to use formal models to capture real-world require-
ments from the automotive domain, thus answering
our first research question. Based on our experience,
models on a very high level of abstraction appear to
be especially suitable for detecting inconsistencies in
requirements and for generating useful test cases.
Our interviewees indicated that the approach is
highly interesting and relevant, and that they are in
fact currently planning to introduce a model-based ap-
proach for requirements engineering and connected
to verification, answering our second research ques-
tion. As challenges, the interviewees see the effort
to create requirements models of an existing require-
ments base, appropriate tool support and tool integra-
tion, and the (lack of) support from management and
developers.
ACKNOWLEDGEMENTS
The research leading to these results has re-
ceived partial funding from the European Union’s
Seventh Framework Program (FP7/2007-2013) for
CRYSTAL-Critical System Engineering Acceleration
Joint Undertaking under grant agreement N
o
332830,
from Vinnova under DIARIENR 2012-04304, and
from the Austrian Research Promotion Agency (FFG)
under grant agreement N
o
838498.
REFERENCES
Agner, L. T. W., Soares, I. W., Stadzisz, P. C., and Sim
˜
ao,
J. M. (2013). A brazilian survey on UML and model-
driven practices for embedded software development.
Modelling Behavioural Requirements and Alignment with Verification in the Embedded Industry
433

Journal of Systems and Software, 86(4):997–1005.
{SI} : Software Engineering in Brazil: Retrospective
and Prospective Views.
Aichernig, B. K., Brandl, H., J
¨
obstl, E., Krenn, W., Schlick,
R., and Tiran, S. (2015a). Killing strategies for model-
based mutation testing. Software Testing, Verification
and Reliability, 25(8):716–748.
Aichernig, B. K., H
¨
ormaier, K., and Lorber, F. (2014). De-
bugging with timed automata mutations. In Com-
puter Safety, Reliability, and Security - 33rd Interna-
tional Conference, SAFECOMP 2014, Florence, Italy,
September 10-12, 2014. Proceedings, pages 49–64.
Aichernig, B. K., H
¨
ormaier, K., Lorber, F., Nickovic, D.,
and Tiran, S. (2015b). Require, test and trace IT. In
Formal Methods for Industrial Critical Systems - 20th
International Workshop, FMICS 2015, Oslo, Norway,
June 22-23, 2015 Proceedings, pages 113–127.
Aichernig, B. K., Lorber, F., and Nickovic, D. (2013). Time
for mutants - model-based mutation testing with timed
automata. In Tests and Proofs - 7th International Con-
ference, TAP 2013, Budapest, Hungary, June 16-20,
2013. Proceedings, pages 20–38.
Albinet, A., Begoc, S., Boulanger, J., Casse, O., Dal, I.,
Dubois, H., Lakhal, F., Louar, D., Peraldi-Frati, M.,
Sorel, Y., et al. (2008). The memvatex methodology:
from requirements to models in automotive applica-
tion design. In 4th European Congress on Embedded
Real Time Software (ERTS ’08).
Alur, R. and Dill, D. L. (1994). A theory of timed automata.
Theoretical computer science, 126(2):183–235.
Belli, F., Beyazit, M., Takagi, T., and Furukawa, Z. (2012).
Model-based mutation testing using pushdown au-
tomata. IEICE Transactions, 95-D(9):2211–2218.
B
¨
ohm, W., Junker, M., Vogelsang, A., Teufl, S., Pinger, R.,
and Rahn, K. (2014). A formal systems engineering
approach in practice: An experience report. In Pro-
ceedings of the 1st International Workshop on Soft-
ware Engineering Research and Industrial Practices,
SER&IPs 2014, pages 34–41.
Boulanger, J.-L. and V
ˇ
an, Q. D. (2008). Requirements engi-
neering in a model-based methodology for embedded
automotive software. In IEEE International Confer-
ence on Research, Innovation and Vision for the Fu-
ture (RIVF ’08).
Braun, P., Broy, M., Houdek, F., Kirchmayr, M., M
¨
uller,
M., Penzenstadler, B., Pohl, K., and Weyer, T.
(2014). Guiding requirements engineering for
software-intensive embedded systems in the automo-
tive industry. Computer Science - Research and De-
velopment, 29(1):21–43.
Broy, M., Dederichs, F., Dendorfer, C., Fuchs, M., Gritzner,
T. F., and Weber, R. (1992). The design of distributed
systems: an introduction to Focus. Technische Uni-
versit
¨
at M
¨
unchen.
CESAR Project (2011). CESAR - Cost-efficient methods
and processes for safety relevant embedded systems.
http://www.cesarproject.eu. last accessed Mar. 2016.
CRYSTAL Project (2013). CRYSTAL - CRitical sYS-
Tem engineering AcceLeration. http://www.crystal-
artemis.eu. last accessed Jan. 2016.
Graaf, B., Lormans, M., and Toetenel, H. (2003). Embed-
ded software engineering: the state of the practice.
IEEE Software, 20(6):61–69.
Hessel, A. and Pettersson, P. (2007). Cover-a test-case gen-
eration tool for timed systems. Testing of Software and
Communicating Systems, pages 31–34.
Hutchinson, J., Whittle, J., Rouncefield, M., and Kristof-
fersen, S. (2011). Empirical assessment of mde in in-
dustry. In Software Engineering (ICSE), 2011 33rd
International Conference on, pages 471–480.
Liebel, G., Marko, N., Tichy, M., Leitner, A., and Hansson,
J. (2016). Model-based engineering in the embedded
systems domain: an industrial survey on the state-of-
practice. Software & Systems Modeling, pages 1–23.
Lubars, M., Potts, C., and Richter, C. (1993). A review of
the state of the practice in requirements modeling. In
IEEE International Symposium on Requirements En-
gineering (RE ’93), pages 2–14.
Mikucionis, M., Nielsen, B., and Larsen, K. G. Real-time
system testing on-the-fly. In Sere, K. and Wald
´
en, M.,
editors, NWPT 2003, number 34 in B, pages 36–38.
Abo Akademi, Department of Computer Science, Fin-
land.
Nielsen, B. and Skou, A. (2001). Automated test genera-
tion from timed automata. In TACAS 2001, held as
Part of ETAPS 2001 Genova, Italy, April 2-6, 2001,
Proceedings, pages 343–357.
Piques, J. and Andrianarison, E. (2011). Sysml for embed-
ded automotive systems: lessons learned. Interfaces,
3:3b.
Procaccino, J. D., Verner, J. M., Overmyer, S. P., and Darter,
M. E. (2002). Case study: factors for early prediction
of software development success. Information and
Software Technology, 44(1):53–62.
Sikora, E., Tenbergen, B., and Pohl, K. (2011). Require-
ments engineering for embedded systems: An inves-
tigation of industry needs. In Berry, D. and Franch,
X., editors, Requirements Engineering: Foundation
for Software Quality, volume 6606 of Lecture Notes
in Computer Science, pages 151–165.
Wieringa, R. J. (2014). Design science methodology
for information systems and software engineering.
Springer.
Woodcock, J., Larsen, P. G., Bicarregui, J., and Fitzgerald,
J. (2009). Formal methods: Practice and experience.
ACM Comput. Surv., 41(4):19:1–19:36.
Zave, P. (1982). An operational approach to requirements
specification for embedded systems. IEEE Transac-
tions on Software Engineering, SE-8(3):250–269.
MODELSWARD 2017 - 5th International Conference on Model-Driven Engineering and Software Development
434
