
Agent-based Reconfigurable Natural Language Interface to Robots
Human-Agent Interaction using Task-specific Controlled Natural Languages
Tamás Mészáros and Tadeusz Dobrowiecki
Department of Measurement and Information System,
Budapest University of Technology and Economics, Budapest, Hungary
Keywords: Human-Machine Interaction (HMI), Human-Robot Interface (HRI), Human/Robot-Communication (HCL),
Controlled Natural Language (CNL), Robot Operating System (ROS).
Abstract: We present the architecture of a flexible natural language based interface to robots involved in tasks in a
mixed-initiative human-robot environment. The designed interface uses a bidirectional natural language
communication pertinent to the user, the robot and the tasks at hand. Tasks are executed via agents that can
communicate and engage in conversation with the user using task-specific controlled natural languages. The
final interface language is dynamically composed and reconfigured at the interface level according to the tasks
and skills of the robotic system. The multi-agent infrastructure is fused with the ROS robotic middleware to
provide seamless communication to all system components at various level of abstraction.
1 INTRODUCTION
The evolution of robots from strict manufacturing to
various service domains widened the spectrum of the
potential human collaborators to humans not versed
in the details of the robotic systems.
In such mixed robot-human teams (let it be an
ailing elderly and the household robot, robotic
museum guide and its visitors, shopping mall guide
and customers, etc.), the principal communication
modality is the natural human language (NL), getting
in addition around the reading and typing by
assuming speech modality (Burgard 1999, Rousseau
2013, Khayrallah 2015). Such level of interaction
does not demand from the human agent any
additional professional knowledge and skills beside
the natural knowledge of the task and goals.
Using natural language (i.e. speech) alone was
already considered and serious reviews are available
(Bastianelli 2014, Schiffer 2012). The natural
language interactions were also discussed in the
context of service robotics, ranging from simple
canned commands, via speech act protocols to the full
natural language conversation without any
constraints and limitations (Fong 2003).
Plenty of research has already been done in
translating human NL demands into commands
interpretable by the robot, even to the low level of the
ROS commands (Lauria 2002, MacMahon 2006,
Kemke 2007, Tellex 2011, Schiffer 2012, Howard
2014, Bastianelli 2014, Ferland 2014, Stenmark
2015). These approaches however addressed
applications where the robot had a number of well-
defined configuration and fixed set of tasks for which
natural languages were designed, and only a few
considered the option (and the potential) of the robot
feed-back in natural language (Green 2009) or more
complex dialogues with humans (Huber 2002).
A fully bi-directional and adaptive NL-based
human-robot interface (HRI) requires an architecture
that is more advanced. The grammar and the
vocabulary of the human-to-robot NL interaction
should dynamically adapt to the specifics of the robot
design and the changing set of tasks and situations
that the robot encounters. In order to achieve this our
approach was to design a system that can dynamically
change the natural language used on the HRI by
seamlessly integrating task-specific sublanguages
used by individual components (agents) in the robotic
system.
It is almost impossible to tackle this task in a
uniform, generic and formal way. Some components
admitting an informal, ad hoc design must also be
included in the HRI architecture and design. In the
present paper we propose an architecture constraining
the communication to the level of so called controlled
natural language (Wyner 2009). Our aim here is to
keep the format of the conversation well acceptable
632
MÃl’szà ˛aros T. and Dobrowiecki T.
Agent-based Reconfigurable Natural Language Interface to Robots - Human-Agent Interaction using Task-specific Controlled Natural Languages.
DOI: 10.5220/0006205306320639
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 632-639
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

to the human, yet formally treatable by the robotic
system to be used also internally between the
distributed system components.
The context of the development is an interesting
mixed-initiative application domain (described in
detail in Section 3), where the robot acts as a guide to
the human, and where the human acts as the helper to
the robot, essentially acting for its costly gripping and
sensing. It makes the design of the robot simpler (and
permits to move more intelligence and resources to
other system components), and extends the spectrum
of the manageable objects (as a gripper human arm
and hand outperforms the robotic technology in the
variety of objects it can handle with gentleness and
precision, in size, weight, shape, texture, etc.,
grasping, stacking, turning, placing, ... all with the
same "gripper").
Our contribution here aims at the principled
development of a bidirectional and flexible
conversation interface spanning the full robotic
system, from the hand held devices to the ROS nodes
in the robot middleware.
2 ROS-BASED ROBOTS
2.1 Robot Operating System
ROS based system implementation means a
collection of loosely coupled, independent computing
entities (nodes) exchanging information via
asynchronous messages. The ROS Master is that part
of ROS, which is responsible for providing topical
connectivity ("yellow pages") among the nodes.
ROS system can be deployed across multiple
machines, with one of them designated to host the
master. A node is a running instance of a ROS
program. (Well-designed) ROS nodes are loosely
coupled, with (generally) no programmed-in
knowledge about other nodes in the architecture.
ROS nodes communicate with each other using a
publisher-subscriber model: they send messages to a
declared topic (publishing) and receive on demanded
topic (subscribing). A node that wants to share
information will publish messages on the appropriate
ROS topic and a node that wants to receive
information will subscribe to that topic. The ROS
Master ensures that nodes will find each other. The
messages themselves are sent directly from publisher
to subscriber.
2.2 Reconfigurable Robots
One of the essential so called core robotic system
abilities (beside adaptability, interaction, motion,
manipulation, perception, cognitive ability,
dependability, and decisional autonomy) is the
configurability. It means the ability of the robot to be
configured to perform a task or reconfigured to
perform different tasks (H2020). Configuration may
range from a simple change of parameter values,
through re-programming the system, up to being able
to alter the physical structure of the system
(especially its body of sensors and actuators).
The configuration ability can be the prerogative of
the system designer, but can be moved into the hands
of the user, or even the robot itself. Among many
possible mechanisms of configuration (configuration
files, skilled operator interaction, unskilled operator
interaction, automatic arrangement, remote
communication of configuration, see (H2020)) the
unskilled operator case is for us of special
importance, as such operator (plain user) required
usually an unprofessional and natural interface to
interact with the robotic system, where the speech
modality offers itself at once.
In the next section we will see that the intelligent
trolley (our prototype) is configured from the buying
user to the buying user, being effectively re-
programmed by the user’s shopping list and in the
real-time by the course of conversation with the
customer. The developed natural language interface
(configurable linguistically in itself) is thus a tool in
the hands of the user to configure the general purpose
intelligent robot to become his or her personalized
service robot, at least for the timespan of buying.
3 THE PILOT SCENARIO
Our prototype robot called iTrolley works in a self-
service warehouse environment where its main task is
to help customers to collect (large) boxes of selected
wares. A typical application is a furniture store where
the user selects goods in the display area and picks
them up in the self-service storage area.
The iTrolley provides intelligent, automated and
easy-to-use transport support. It helps the user to
traverse the storage area along an optimal path while
collecting goods. It answers questions and queries
about the shopping and the goods, resolves problems
and warns about mistakes during the entire process.
The robot may also provide additional services like
payment preparation, customer support related to the
wares, marketing, etc.
Agent-based Reconfigurable Natural Language Interface to Robots - Human-Agent Interaction using Task-specific Controlled Natural
Languages
633

3.1 Roles in the Pilot Scenario
The human Customer selects the wares in the display
area (creating the shopping list) then s/he picks up the
selected goods boxed for delivery in the storage area.
Finally, the Customer pays at the checkout area and
puts the boxes into a car waiting in the shipping area.
The Shopping App runs on the Customer's
mobile phone and helps browsing and selecting wares
in the display area. It maintains the shopping list and
helps the Customer to communicate with the robot.
The iTrolley Robot is a self-moving autonomous
transport robot that helps the Customer to carry
goods. It guides the Customer to the appropriate
shelves in the storage area and gives instructions
which boxes should be collected. It helps in detecting
and resolving problems, provides payment
information at checkout and brings the goods to the
appropriate shipping location.
The Warehouse Management System provides
inventory, payment, advertisement and other services
and information to the Robot and the Customer.
3.2 The Shopping Scenario
The Customer enters the Warehouse, installs the
Shopping App software on her/his phone or picks up
a warehouse hand device with the application already
installed, starts browsing the displayed goods
(furniture, household appliances etc.) in the display
area.
To buy an item s/he scans its code with the
Shopping App (adding the item to the shopping list).
After having finished the browsing s/he enters the
Storage area and selects an available iTrolley Robot,
and connects the Shopping App to the selected robot.
The iTrolley Robot talks with the Customer in
natural language using speech recognition and
synthesis. It plans the preliminary route along the
Storage Area to pick the goods and executes it. It
directs the Customer to the appropriate shelf where
the item on the shopping list can be found, instructs
the Customer to pick items (boxes) from the shelf and
to put them on the robot’s transport platform,
identifies and verifies the picked items (by weighting
them or detecting barcodes present on the boxes) and
warns the Customer about wrongly picked items. It
also communicates with other iTrolley agents to
resolve route conflicts, continuously modifies its
route according to the global information about other
iTrolley routes, traffic jams, etc. (cooperative
planning).
When all goods are collected the iTrolley Robot
provides pre-payment information to the cashiers at
the checkout area, takes its load to an available
cashier to proceed with the payment.
After the customer paid for the goods the cashier
accepts the transaction and allows the Robot to
proceed to the shipping area, collecting the
warehouse's hand device from the Customer (if
applicable). The iTrolley finally transports the goods
to the shipping area.
3.3 Natural Language Communication
The iTrolley Robot communicates with the Customer
in the spoken natural language. This makes it possible
for the Customer to formulate queries and commands
easily and to understand well the information
provided by the robot. Situations presented in the
shopping scenario may require many kinds of
communication between the system and the Customer
ranging from instructions given to or by the robot,
through information sharing activities till a general
chat. The reconfigurable nature of the robot, the
various shopping list items and the varying needs of
the Customer yield also many possible (and
changing) conversation scenarios.
To take all these into account we designed a
flexible and modular framework for natural language
human-robot communication.
4 ARCHITECTURE
Our solution is designed as a ROS-based system
meaning that the ROS platform provides the basic
organization and communication capabilities
throughout the entire system. It connects the human-
machine interface to the robotic components as well
as to other application specific modules.
4.1 Interface Components
The interface's internal architecture contains the
following components (
Figure 1).
The Voice Agent runs on a mobile device and
contains a speech recognition module for detecting
the user's input, a speech synthesis module for passing
messages from the system to the user, a ROS
communication module that connects the agent to the
ROS-based system, and a dispatcher component that
analyzes the user's input in order to determine the
appropriate target agent that can process that input. In
the pilot system this component is called the
Shopping App, and it also contains a camera with
barcode scanner as an input device.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
634

Robotic Modules run on the robot and provide
services like physical movement and the navigation
of the robot, handling sensor inputs and other
hardware- and robot-specific modules. In the pilot
scenario, these modules provide movement and
navigation functions in the warehouse environment.
Local Application Agents run in close relation
with the robotic modules. These agents provide
higher level services like map discovery, route
planning, error detection and recovery, etc. They may
also possess natural language processing and
understanding components, state management of
human-robot conversations and application-specific
functions. In the pilot scenario, these modules handle
the shopping list, retrieve information (e.g. location)
about the goods, plan the route in the storage area,
coordinate item pick-up and perform task-specific
natural language communication with the Customer.
Finally, Global Application Agents run
independently from the robot and provide services
like synchronizing the operation of multiple robots
and resolving conflicts, logging and monitoring, etc.
In our application, these agents provide warehouse
inventory information and an administrator interface
for monitoring the entire system.
4.2 Communication
All mentioned components communicate with each
other using the ROS infrastructure, although they also
encapsulate higher-level protocols in their messages.
We differentiate the following three levels of
communication.
At ROS level Robotic Modules communicate
using standard ROS messages and semantics. These
messages are delivered via well-defined topics and
follow the standard semantics of the robotic
components. For example, the navigation module
communicates with the robot motor subsystem to
reach the desired location in the storage area.
The Voice Agent, Local and Global Application
Agents communicate among themselves using Agent
Communication Languages (ACL) embedded in the
ROS messages. This is the ROS-ACL level, which
will be discussed in more detail in Section 5.3.
The Voice Agent communicates with the user
using spoken natural language. In order to represent
these messages internally the agent transforms them
to ROS-ACL-NL messages. At this level natural
language sentences are embedded in the ROS-ACL
messages. These sentences are parsed and understood
by Local and Global Application Agents that use
task-specific controlled natural languages detailed
later on in Section 6.
5 HOW DOES IT WORK
5.1 The Voice Agent
The main task of the Voice Agent is to communicate
with the user using spoken natural language dialogues
and transform them to ROS-ACL-NL messages. It
provides no application-specific services or interface
in general; it is merely the man-machine
communication component of the system. In this
respect it plays two roles: the Speaker and the
Listener, for speaking and for speech recognizing. It
can be placed on the robot itself or it can be deployed
independently on a (mobile) device.
After starting up the Voice Agent implements two
ROS topics (channels). The Speaker topic is used to
receive requests for speech synthesis, while the
Listener topic accepts subscription messages from
other agents for notification about recognized input
sentences from the Customer.
The Voice Agent's Speaker receives ROS-ACL-
NL messages in which agents can request that natural
language text present in the message should be
spoken to the user. The Voice Agent queues the
Figure 1: The high-level architecture of the system with various communication methods.
Agent-based Reconfigurable Natural Language Interface to Robots - Human-Agent Interaction using Task-specific Controlled Natural
Languages
635

requests, and speaks them one-by-one using the
output device. In our prototype implementation a
simple FIFO scheduler is used for ordering the
messages in the queue. If a given application would
require it, other scheduling methods can also be used.
It is even possible to use pre-emptive algorithms for
urgent alert messages that notify the user of some
imminent danger.
The Voice Agent working in Listener mode
receives user input and routes it to the appropriate
agent for processing. In order to do it, it accepts
subscriptions for certain language patterns. These
subscriptions are specified in ROS-ACL subscribe
messages that include their ROS topic (to which the
input should be delivered), the filter pattern for the
input and a priority value for the given pattern.
Such patterns can be considered as language
detection rules for task-specific controlled natural
languages. An agent that wishes to communicate with
the user provides these rules for the Voice Agent to
select those input messages that it is interested in.
Agents can specify or delete such rules dynamically
as their operation (or life cycle) requires it. The Voice
Agent always maintains a complete set of language
rules according to the actual needs of other agents.
5.2 Task-specific Agents
Task-specific global and local application agents are
responsible for services and functions required by the
application. They communicate as ROS nodes in the
system: they may create their own topics or subscribe
to other topics as well. In addition to the standard
ROS semantics they may also use ROS-ACL
messages when communicating with other agents,
and the ROS-ACL-NL protocol for natural language
communication.
Application agents may also use the Voice
Agent’s previously mentioned Listener and Speaker
topics to communicate with the user. In this case they
send their own language detection rules to the
Listener and subscribe for the incoming messages.
They receive them from the Voice Agent in ROS-
ACL-NL format and they also send such messages to
the Voice Agent's Speaker to be spoken to the user.
Examples for such agents can be found in Section 7.3.
5.3 ROS-ACL Messages
Agents communicate with each other using Agent
Communication Language (ACL). The underlying
communication framework is provided by the Robot
Operating System, therefore ACL communication is
embedded in ROS messages. This developed
communication method is called ROS-ACL.
Any kind of ACL speech acts and semantics can
be used as needed by the given application. For
application-independent functions we have selected a
limited set of ACL messages. Application agents may
communicate with other agents using the ACL
semantics: they request a service from another agent
(e.g. text to speech messages can be sent as a request
to the Voice Agent), subscribe to events (e.g. user
input at the Voice Agent), inform other agents about
events (e.g. recognized input text is sent from the
Voice Agent to subscriber), and so on.
6 CONTROLLED NATURAL
LANGUAGE
COMMUNICATION
In a traditional software system user interface
elements created and handled by various application
components are assembled into a single graphical
user interface by a compositing display manager.
The developed natural language interface
implements a similar method. Every agent can
communicate with the user using its own task-specific
controlled natural language and a compositing
interface (the Voice Agent) unifies these languages.
6.1 Natural Language Messages
When the user communicates with the system in
spoken natural language the Voice Agent analyzes
speech input and transforms it into ROS-ACL-NL
messages where natural language sentences are
embedded at the content level. These sentences are
then received, parsed and understood by application
agents.
Agents communicate with the user using task-
specific controlled natural languages. These
languages are created solely for the functions
provided by the agents. E.g. in our pilot application
we have created languages for shopping list
assembly, item pick-up, etc. Since the system
communicates with the user using a single voice input
interface (the Voice Agent), it should be able to
separate different languages, and it should determine
a target agent for a given sentence from the human
user. This is done by language detection rules
provided by the application agents. The rules are used
by the Voice Agent to determine the controlled
natural language which is the best match for a given
sentence and which agent is the target of that
communication.
The rules have the following attributes: priority
(importance), the ROS topic, and the language
detection pattern.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
636

Based on such rules the Voice Agent determines
which patterns match a given input sentence, selects
the topic with the highest priority, and assembles a
ROS-ACL message to be sent to that topic.
In addition to the language detection, the Voice
Agent is also able to maintain conversation between
the user and the agents. Discourse detection is done
using a similar rule-based scheme.
6.2 Conversation Management
To handle conversation between the user and the
application agents we have applied finite state
machines. These machines describe the possible
states of the human-agent conversations and the
possible state transitions defined by the application
and the rules of the controlled languages.
The states of the finite state machine represent
stages of the conversation with the user. A state can
be changed by the user input (defined by the
transitions for each state) or by the application logic
of the agent (e.g. the agent can change its state when
a message is received from another agent or ROS
node). State transitions also specify the output to be
sent to the user when the transition happens.
Every agent maintains its own state of
conversation and provides information about allowed
state transitions (possible user inputs specified via
filter masks) to the Voice Agent. This interface agent
collects all state transition filter masks and uses them
in a similar way as language detection rules work.
There are also other mechanisms to ease the
development of complex state machines (like
“shortcut” transitions, initialization messages at
states, etc.) that are not described in this paper.
7 PROTOTYPE TESTING
The demo application is implemented as a ROS-Java-
Android hybrid system following the previously
detailed system design and the pilot application
scenario.
The ROS core of the pilot application runs in a
simulated environment using Gazebo graphical robot
simulator (gazebosim.org). It uses Jackal ROS
package for navigation. We have developed several
application-specific agents in Java to perform various
tasks in pilot application. The Voice Agent is
implemented in the Android ecosystem.
The software demonstration is based on open
source tools and can be installed on Ubuntu using a
Docker-based automated installation utility. The
source code of our prototype application can be found
at our project Web page (R5-COP 2016).
7.1 The ROS Simulator
We used the Gazebo simulator for testing and
demonstration purposes.
It is a universal robotic simulation toolbox with
advanced graphics and physics engine. Figure 2
shows the simulated robot and the storage area of the
warehouse. For the sake of simplicity, Jackal robot
model is used. The products (boxes) in the warehouse
are located on standard shelves.
In addition to the visual interface the ROS
simulator provides also several robotic components
for sensor input, robot movement, route planning and
navigation etc. These are used by application agents
to perform various tasks in the pilot scenario.
Figure 2: The simulated storage area with the robot.
7.2 The Voice Agent Android App
We developed the Voice Agent as an Android
application using the Google Speech Synthesis and
Speech Recognition APIs to implement the necessary
input and output function for the Listener and Speaker
roles. The application has a simple configuration
interface to specify the address of the ROS core.
After the configuration is finished the Voice
Agent connects to the ROS core. When other agents
in the system are connected to the Voice Agent, their
detection rules are displayed for debugging purposes.
The application also contains a camera module to
scan and recognize QR codes that are used to
assemble the shopping list in the display area of the
warehouse. We also used them to simulate the robot's
camera that checks the collected wares during the
pick-up phase in the storage area. In the simulation
the robot asks the customer to scan the code of the
selected box using the hand device, and it warns the
user if a wrong box is picked.
Agent-based Reconfigurable Natural Language Interface to Robots - Human-Agent Interaction using Task-specific Controlled Natural
Languages
637
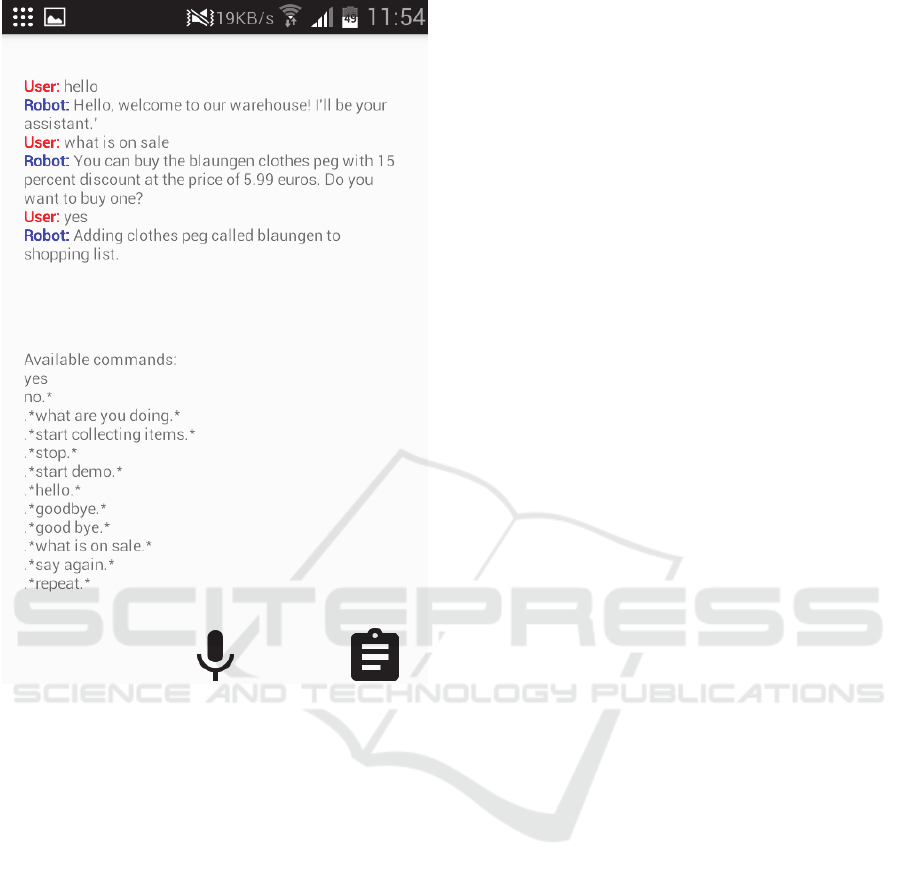
Figure 3: The Voice Agent as an Android application.
7.3 Application Agents
We have developed several application agents for the
pilot scenario.
The simplest is HowAreYou Agent that performs
general chat like greeting, goodbye and the like. It
also has a wild-card rule with low priority that allows
the system to respond to messages not recognized by
any other agent.
The ShoppingList Agent is responsible for
maintaining the state of the shopping list shown to the
user on Android device. It also maintains the states of
the wares, whether they are collected or not in the
Storage Area, or if the robot is waiting directly in
front of the shelf where the box can be found. It
communicates with the ItemCollector Agent and with
Pickup Agent.
The ItemCollector Agent is responsible for
navigating the robot to items found on the shopping
list, while the Pickup Agent instructs the user to pick
up the box when the robot arrives to the appropriate
place. This agent also validates the user's action by
checking the QR code of the box.
There are other agents that communicate with the
user in controlled natural language. For example, the
Sales Agent advertises items on sale. All these agents
have their simple controlled natural language rules,
conversational states and state transitions.
In addition to these application agents the system
also possesses a main agent, responsible for starting
and stopping the execution of the demo application,
the and the ROSDisplay Agent with a graphical user
interface that provides monitoring of the system.
8 CONCLUSIONS
The developed system provides a natural language
voice interface for a robotic system that provides a
complex functionality to the human user. The internal
complexity of the robotic system is tackled using
several application-specific agents. These agents use
task-specific controlled natural languages. The
system uses a common natural language interface to
communicate with the user using speech recognition
and voice generation. This interface (the Voice Agent)
uses language and discourse detection rules to
identify the agent to which a given user message
should be delivered.
The system is developed using the industrial
standard ROS framework. Messages between agents
and other ROS components are embedded into ROS-
messages with different level of abstraction. The
speech input and generation interfaces are
implemented on the Android platform that provides
readily available functionality for these purposes. The
software running on the Android device is also
connected to the ROS-based robotic system.
Although the system was developed for the
iTrolley pilot scenario, it can be easily adapted to
other applications as well. The communication
framework and the Voice Agent are application
independent thus need no customizations. This also
implies that a developed system can also be
reconfigured if the robotic hardware changes. In this
case new ROS modules and modifications in
Application Agents might be required depending on
the nature of the change.
The developed solution not only accepts spoken
commands from the users but it is also able to initiate
and engage in conversations with the user in many
different topics at the same time. This is an important
feature for robots in application fields like health care,
ambient assisted living. In these areas they not only
perform, fulfil user commands (demands), but must
direct, command, influence the users towards goals
set by the staff controlling the user environment.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
638

Furthermore, by replacing the ROS framework
with other means for communication our approach
may also be applied to other application areas where
a multi-agent system should use a common human-
machine interface to communicate with its users.
Other modalities could also be developed in
addition to the speech interface. By extending the
functionality of the Voice Agent other input methods
like text input with autosuggest function, gesture
recognition or simple menu-based interfaces could
also be implemented. Such additional modalities can
amplify the disambiguation capabilities and improve
the efficiency of the communication (Green 2009,
Breuer 2012, Fardana 2013).
ACKNOWLEDGEMENTS
This work was supported in part by ARTEMIS Joint
Undertaking and in part by the Hungarian National
Research, Development and Innovation Fund within
the framework of the Reconfigurable ROS-based
Resilient Reasoning Robotic Cooperating Systems
(R5-COP) Project.
The prototype application was developed by a
group of researchers including István Engedy, Péter
Eredics and Péter Györke at our department.
REFERENCES
Bastianelli E., G. Castellucci, D. Croce, R. Basili, D. Nardi,
2014. Effective and Robust Natural Language
Understanding for Human obot Interaction, ECAI 2014,
T. Schaub et al. (Eds.).
Breuer, Thomas, et al. 2012. Johnny: An autonomous
service robot for domestic environments. Journal of
intelligent & robotic systems 66.1-2 (2012): 245-272.
Burgard W., A.B. Cremers, D. Fox, D. Hähnel, G.
Lakemeyer, D. Schulz, W. Steiner, S. Thrun, 1999.
Experiences with an interactive museum tour-guide
robot, Artificial Intelligence 114 (1999) 3–55.
Fardana A.R., S. Jain, I. Jovancevic, Y. Suri, C. Morand and
N.M. Robertson, 2013. Controlling a Mobile Robot
with Natural Commands based on Voice and Gesture,
Workshop on Human Robot Interaction (HRI) for
Assistance and Industrial Robots, VisionLab, Heriot-
Watt University, 2013.
Ferland F., R. Chauvin, D. Létourneau, F. Michaud, 2014.
Hello Robot, Can You Come Here? Using ROS4iOS to
Provide Remote Perceptual Capabilities for Visual
Location, Speech and Speaker Recognition, Proc. HRI
'14 the 2014 ACM/IEEE Int. Conf. on Human-Robot
Interaction, Pages 101-101.
Fong T., I. Nourbakhsh, K. Dautenhahn, 2003. A survey of
socially interactive robots, Robotics and Autonomous
Systems 42 (2003) 143–166.
Green A., 2009. Design and Evaluating Human-Robot
Communication, PhD, KTH, 2009.
H2020 – Robotics 2020 – Multi-Annual Roadmap For
Robotics in Europe - http://www.eu-robotics.net/
Howard T.M., I. Chung, O. Propp, M.R. Walter, and N. Roy,
2014. Efficient Natural Language Interfaces for
Assistive Robots, IROS 2014 Workshop on
Rehabilitation and Assistive Robotics, Sept 14-18,
2014, Chicago.
Huber A., Bernd L. 2002. Users Talk to their Model Trains:
Interaction with a Speech-based Multi-Agent System.
Proceedings of the First International Joint Conference
on Autonomous Agents and Multi-Agent Systems,
AAMAS 2002, July 15-19, Bologna, Italy,
Kemke C., 2007. “From Saying to Doing” – Natural
Language Interaction with Artificial Agents and
Robots, Ch 9, Human-Robot Interaction, (ed.) N.
Sarkar, Sept 2007, Itech Education and Publishing,
Vienna, Austria.
Khayrallah H., S. Trott, J. Feldman, 2015. Natural
Language For Human Robot Interaction, Proc. of the
Workshop on Human-Robot Teaming at the 10th
ACM/IEEE Int. Conf. on Human-Robot Interaction,
Portland, Oregon.
Lauria S., T. Kyriacou, G. Bugmann, J. Bos, E. Klein, 2002.
Converting Natural Language Route Instructions into
Robot Executable Procedures, Proc. 11th IEEE Int.
Work-shop on Robot and Human Interactive
Communication, pp. 223-228.
MacMahon M., B. Stankiewicz, B. Kuipers, 2006. Walk the
Talk: Connecting Language, Knowledge, and Action in
Route Instructions, Proc. AAAI'06 the 21st Nat. Conf.
on Artificial Intelli. - Vol 2, pp. 1475-1482.
R5COP 2016, http://r5cop.mit.bme.hu/
Rousseau V., F. Ferland, D. Letourneau, F. Michaud, 2013.
Sorry to Interrupt, But May I Have Your Attention?
Preliminary Design and Evaluation of Autonomous
Engagement in HRI, J. of Human-Robot Interaction,
Vol. 2, No. 3, 2013, pp. 41–61.
Schiffer S., N. Hoppe, and G. Lakemeyer, 2012. Natural
Language Interpretation for an Interactive Service
Robot in Domestic Domains, J. Filipe and A. Fred
(Eds.): ICAART 2012, CCIS 358, pp. 39–53, 2012.
Stenmark M., J. Malec, 2015. Connecting natural language
to task demonstrations and low-level control of
industrial robots, Workshop on Multimodal Semantics
for Robotic Systems (MuSRobS) IEEE/RSJ Int. Conf. on
Intelligent Robots and Systems 2015.
Tellex S., T. Kollar, S. Dickerson, M.R.Walter, A. Gopal
Banerjee, S. Teller, N. Roy, 2011. Understanding
Natural Language Commands for Robotic Navigation
and Mobile Manipulation, Proc. of the Nat. Conf. on
Artificial Intelli. (AAAI 2011).
Wyner, Adam, et al. 2009. On controlled natural languages:
Properties and prospects. International Workshop on
Controlled Natural Language. Springer Berlin
Heidelberg, 2009.
Agent-based Reconfigurable Natural Language Interface to Robots - Human-Agent Interaction using Task-specific Controlled Natural
Languages
639
