
A Cognitive Approach for Reproducing the Homing Behaviour of
Honey Bees
Xin Yuan, Michael John Liebelt and Braden J. Phillips
The School of Electrical and Electronic Engineering, The University of Adelaide, Adelaide, South Australia, Australia
Keywords: Artificial Intelligence, Honeybee, Agent-based system, Cognitive Computation.
Abstract: We describe the implementation if an agent-based controller for an autonomous robot with cognitive abilities
that reproduce homing capability in the foraging behaviour of the honeybee. The agent is based on a symbolic
representation of data and information and is written in a language designed to describe fine-grained large
scale parallelism, the Street language (Frost et al. 2015). The objective of this approach is to enable the direct
translation of agents written in Street into embedded hardware, to achieve compact, power efficient, autono-
mous cognitive processing capability.
1 INTRODUCTION
In the field of Artificial Intelligence research, the cog-
nitive architecture approach has shown considerable
promise in implementing autonomous cognitive
agents (Laird 2012). However, a limitation of these
systems is that they are constrained by the memory
capacity and computational performance of the gen-
eral-purpose computing platforms on which they run.
As cognitive agents become more complex and have
longer lifetimes, the number of matching conditions
that must be evaluated concurrently increases and, in
particular, the amount of long-term and working
memory required increases rapidly. Much design ef-
fort has been invested in moderating memory require-
ments in these systems. Our focus is on engineering
low power cognitive processors that can be embedded
in autonomous devices so we have been investigating
dedicated hardware systems that can implement cog-
nitive architectures.
Our developing architecture broadly follows a
production rule-based parallel processing method
(Frost et al. 2015; Numan et al. 2015). It uses a po-
tentially large array of dedicated production rule eval-
uation processors, which we call “productors”, to
concurrently match elements in a distributed memory
and to take actions by updating working memory.
The production rules and actions are expressed in a
customised language, loosely based on OPS-5 (Forgy
1981), which we call “Street”.
Currently, we are using a Java-based simulation
and debugging environment to develop agents in
Street, and we are concurrently pursuing agent devel-
opment and hardware-mapping as part of our research.
A key element of this research is verifying the capa-
bility of the Street language to capture useful levels
of cognitive behaviour, and understanding how re-
quirements for productors and working memory ca-
pacity scale up with agent complexity. We have iden-
tified the homing behaviour of honey bees as a suita-
ble test case for validating our approach.
It is known from neuroethological research (Men-
zel & Giurfa 2001), that cognitive behaviour requires
experience-dependent adaptation of neural networks,
and researchers believe that these procedures require
a more advanced and complex neuronal system than
has been discovered in the insect brain. However, ob-
servations and experiments have shown that the
honey bee (Apis mellifera) is an exception. (Menzel
2012). It is one of the most broadly researched euso-
cial insects in the field of animal ethology. Of partic-
ular interest is its ability to use magnetoreception
(Wajnberg et al. 2010) and landmark recognition (Fry
& Wehner 2002; Gillner, Weiß & Mallot 2008) with
memorization support for homing navigation after
long-distance foraging. (Menzel & Greggers 2015;
Menzel et al. 2005)
Honey bees have a capability of memorising land-
marks and magnetic field changes during a foraging
trip, (Fry & Wehner 2002; Labhart & Meyer 2002;
Menzel & Greggers 2015) and they use these memo-
ries as references to navigate back to their hive.
(Menzel & Greggers 2015) This behaviour requires
Yuan X., Liebelt M. and Phillips B.
A Cognitive Approach for Reproducing the Homing Behaviour of Honey Bees.
DOI: 10.5220/0006195705430550
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 543-550
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
543
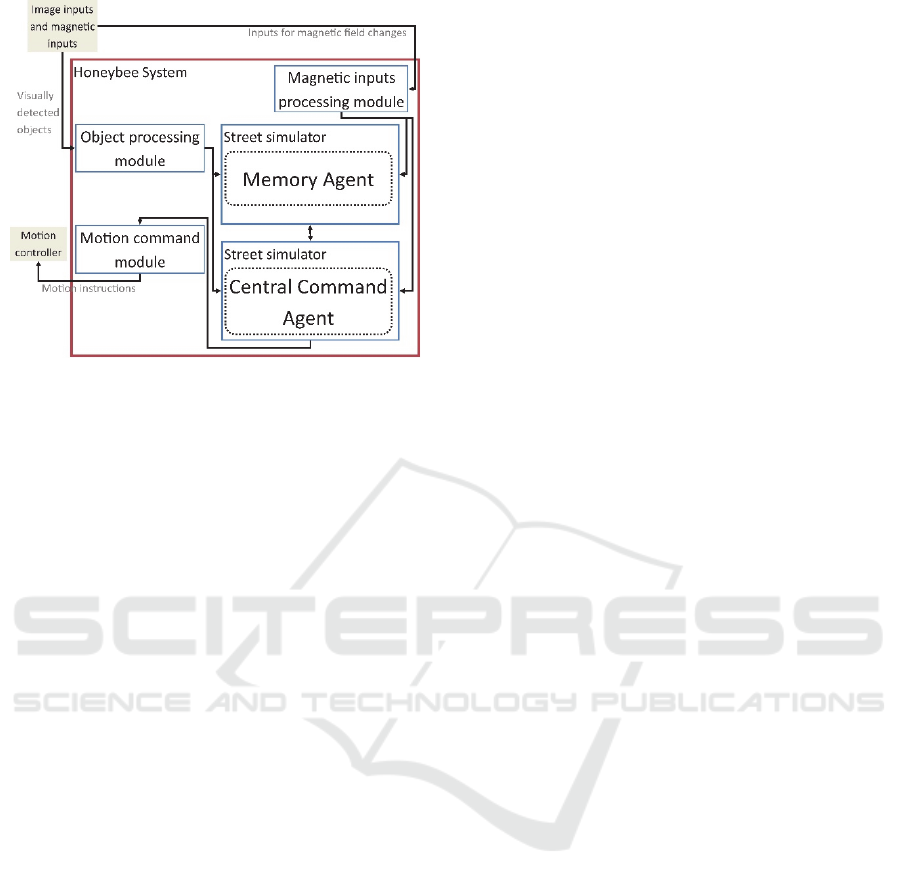
Figure 1: System Structure and Interaction.
memorization of characteristics of the experienced
landmarks, such as colours and sizes, (Labhart &
Meyer 2002) and magnetoreception (Wajnberg et al.
2010) at those memorised positions.
Randolf (Menzel 2012; Menzel & Giurfa 2001)
expressed the architecture of the honey bee’s brain as
a set of communicating modules. Modules are
associated with specific external stimuli. We have the
option of reproducing this modular functional organ-
isation by using separate, intercommunicating Street-
based agents and it is one of the objectives of this
work to understand whether the modular organisation
is effective and efficient when implemented in dedi-
cated hardware.
We propose to demonstrate that an efficient real-
time cognitive agent that is able to reproduce the
homing behaviour of the honeybee can be
implemented in compact electronic hardware, based
on our Street parallel production rule language. Thus,
we set an objective for the behaviour of our agent,
which requires it to reach a target and track its way
back to the initial position using its memorised land-
marks and magnetic data. Our hardware platform for
this work is a rover vehicle comprising a platform
with two drive wheels, a camera and magnetic sensor.
There are many advanced technologies inspired
by the behaviour of insects, and many of them have
made significant progress with applications. However,
our approach differs from prior work in that we are
using an architecture, loosely based on the cognitive
architecture of insects, which can be efficiently im-
plemented in electronic hardware and massively
scaled up in complexity.
2 THE AGENT-BASED SYSTEM
2.1 System Architecture
Our system reproduces the central decision-making
processes in honey bee homing behaviour by imitat-
ing its processing model in our agent-based system.
Our system has a structure that duplicates the mod-
ules in a bee’s brain (Menzel & Giurfa 2001), with
similar interactions between the modules. The system
structure and relationships between the modules are
shown in Figure 1. The system connects to input de-
vices that provide information about objects detected
within the visual field of the rover and an angle w.r.to
geographical north. Outputs are sent to a motion con-
troller, which receives mobility commands from the
Central Command Agent and drives the robot wheels
to produce the required movement. The visual object
processing module and the magnetic input processing
module both receive digital numeric inputs from the
sensors, but translate these into a symbolic represen-
tation. These two modules represent the sensory or-
gans of the bee, which sense external stimuli from the
real environment and transmit them into its nervous
system in the form of chemical elements and elec-
tronic impulses (Giurfa 2007; Kiya, Kunieda & Kubo
2007; Koch & Laurent 1999). The vision module
passes elements, which contain symbolic information
about objects detected in the field of view, to two dif-
ferent modules, which are both running our Street en-
gine simulator but loaded with different agents. One
memorises the information gathered in the foraging
process, and the other determines the movement ac-
tions to be made. This multi-agent structure allows
agent to develop their own Working Memory without
interaction or interference, which we hypothesize will
allow simpler implementation. The details of these
two agents are explained in sections 2.3 and 2.4.
2.2 Input Format
Our rule-based processing methods require data to be
stored in terms of symbolic elements comprising a tu-
ple of symbols, e.g. (
infoA infoB infoC). (Frost
et al. 2015) The number of symbols in an element is,
in principle, unlimited, but, in many cases, elements
capture single attributes of symbols or binary rela-
tionships between symbols and will therefore contain
two or three symbols. Symbols may take any form.
For clarity we assume that symbols may comprise any
printable characters, excluding white space. There-
fore, in the input processing modules, numeric inputs
are converted into symbolic representation using
fuzzy concepts. We restrict ourselves to processing
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
544
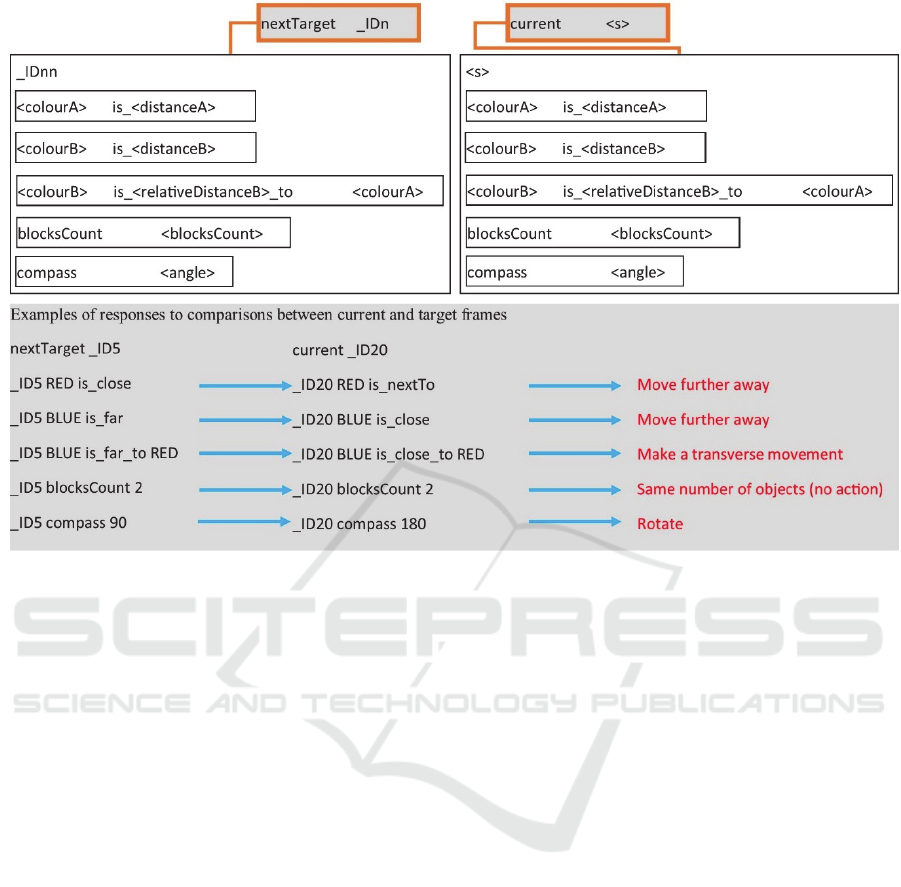
Figure 2.
imprecise representations of information because bi-
ological creatures, to the best of our knowledge, only
recognise and process information in imprecise form.
More specifically speaking, bees are not able to meas-
ure an exact distance to a visualised object, and they
can only sense the surrounding magnetic field with
limited precision. We define a format for sensory in-
puts based on this characteristic, such that an example
of inputs describing a field of view in which there are
two objects appearing is the following.
<s> RED is_close
<s> BLUE is_far
<s> BLUE is_far_to RED
<s> blocksCount 2
Each line is an individual element, in which <s>
represents a unique reference ID for associating infor-
mation contained in multiple elements. The number
of elements is not fixed, and it depends on the number
of objects appearing in the same frame. For example,
if there are ݊ different coloured balls detected, there
will be ݊ elements content the distance information to
each ball and ܥ
ଶ
୬
elements describing the distance be-
tween each pair of balls. Also, the total number of the
detected objects in the field is counted. We refer to a
set of elements such as this, describing a single field
of view and with a common ID, as a Master Frame.
For the magnetic information, the format is as
(
<s> compass <angle>). However, this <angle>
number is only used as a numerical symbol for the
purposes of comparison between the current input and
recorded angles to trigger rotation if they do not
match. Section 2.4.4 introduces the details.
2.3 Memory Agent
This is an agent-based sub-system for information
storage. This module imitates the episodic memory
structure, which keeps a record of the bee’s experi-
ences, with some mechanism for tracing the order in
which they occurred.
The memory agent contains rules, which, in for-
aging mode, take input elements from the image pro-
cessing module and store these as a Master Frame.
Each Master Frame that contains information that is
recognised to be distinct from previous frames is
given a unique reference ID
<s>. These Master
Frames are linked up by the memory agent using an
element of the form
_ID1 followedBy _ID2, and
the reference ID of new inputs is stored in a new
element with the last reference ID, as
_IDnn fol-
lowedBy _IDNew. As a result, a series of elements
is constructed as a linked list of reference IDs in the
agent’s Working Memory.
Like the reaction when a honeybee starts to track
a route back to its hive, when the system switches to
homing mode, a command triggers the rules in the
A Cognitive Approach for Reproducing the Homing Behaviour of Honey Bees
545
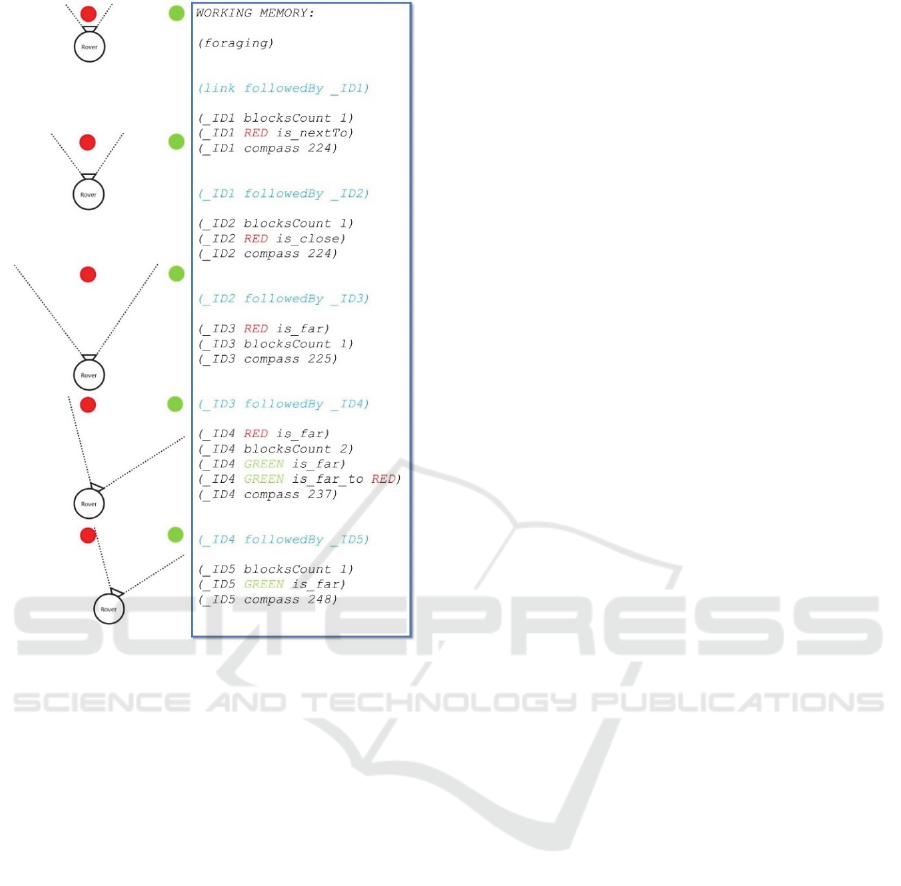
Figure 3.
memory agent to output the last stored Master Frame,
which provides the set of elements describing the last
experienced episode to the Central Command Agent.
2.4 Central Command Agent
The Command Agent is the key controlling module
of the entire system. Firstly, this agent decides on
whether the system is in a free discovery foraging
mode or in homing mode. The difference, or the trig-
ger, between these two modes is whether a targeted
object has been reached. If the information element
representing the target has been received, the system
will be switched into the homing mode and will start
a route back to the original position.
This module receives information about detected
objects from the input processing module, and it both
transmits mode switching commands to the memory
module and receives target information inputs from it
while homing. In the homing mode, this module aims
to find a match between the target objects, using a
comparison process, as illustrated Figure 2. It at-
tempts to determine the relationship between its cur-
rent image frame and the next targeted Master Frame,
and to infer what kind of movement the robot should
make in order to make the two match. Based on the
information received from the input module, there are
multiple comparisons to be performed concurrently.
2.4.1 Distance to an Individual Object
Each image description in the memory agent contains
elements that describe, in fuzzy terms, the perceived
distance to each object in view. For example, the ele-
ment
_ID5 RED is_close,
represents that a red object was detected to be close.
While homing, if
_ID5 is the target Master Frame, the
agent compares the current visual input with it to as-
sess whether the same coloured object is being
viewed at the specified distance. In the command
agent, there are rules to react by moving to adjust the
distance. If the target recorded is closer than an object
currently visualised, the agent instructs the motion
command module to move closer the object. Con-
versely, the agent outputs fall back instructions if the
object is closer than the distance in the target Master
Frame.
2.4.2 Distance between Objects
If more than one object is detected in the visual field,
the visual processing module also generates infor-
mation elements about the relative distance between
the objects. Therefore, a distance between two objects
is also a piece of information that can be used to trig-
ger a movement command. For example, if the inputs
about the contain the element
<new> BLUE is_far_to RED
and the next image is sequence recorded in the
memory has
_ID6 BLUE is_close_to RED
then, the agent will instruct the motion module to
move in a direction that is closer to the two objects,
to increase the perceived separation.
2.4.3 Number of Objects
Another index in a comparison is the number of ob-
jects detected. This is a significantly important fea-
ture for assessing the current position relative to a pre-
vious record. In order to assess either the current
position matches that indicated by the target Master
Frame, the central command agent counts the number
of matched objects to ensure all objtcs in the targeted
Master Frame are. In our architecture, production
rules relating to distances distances are matched indi-
vidually and concurrently, and it is necessary to also
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
546
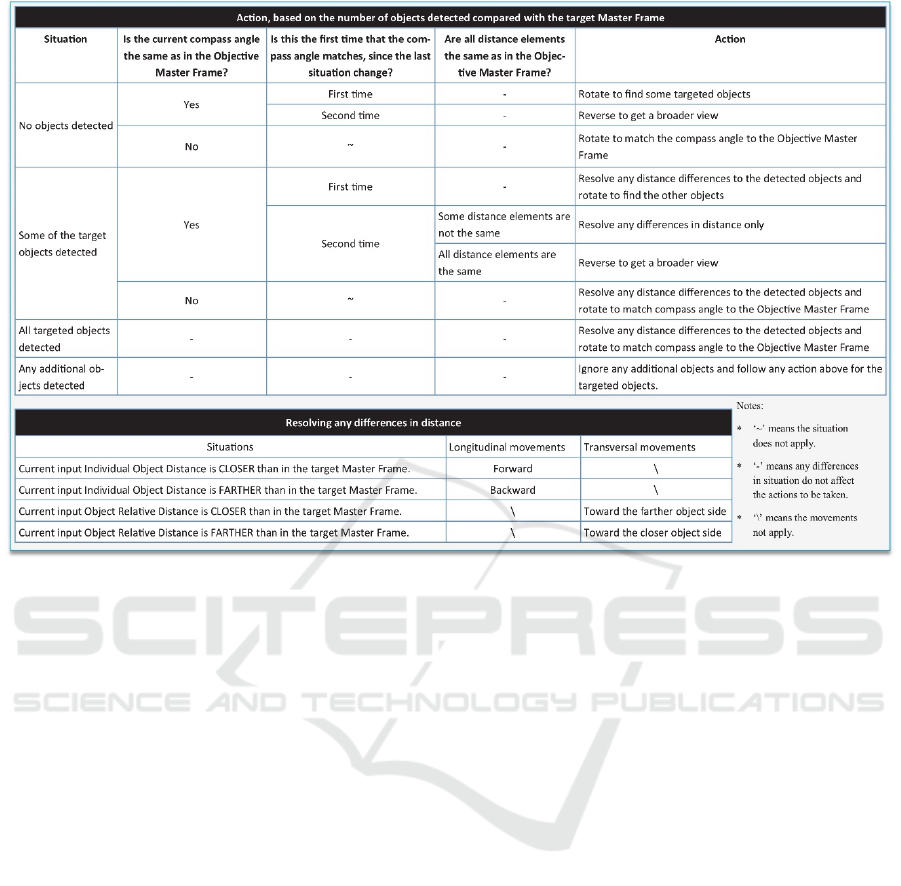
Figure 4.
match the total number of objects in frmae to avoid
any false positives.
2.4.4 Compass Reference
It is known that honey bees possess a sensory system
that is able to detect and remember the direction in
which they are heading. In flight, they can yaw to
match up their current heading with a remembered di-
rection.
Our system includes a magnetic compass that is
intended to reproduce this feature of honeybees. We
use the number output by the compass (the angle
w.r.to geographical North) as a symbolic indicator of
direction, but do not perform any arithmetic pro-
cessing on this number.
2.5 Motion
The motion activities depend on the mode of the sys-
tem. While the system is in foraging mode, the motion
command module generates random movement in-
structions to have a free exploration of the environ-
ment to discover the target object. When the system
is in homing mode, all motion commands will be
based on instructions from the central command agent.
Clearly, on a two wheeled robotic platform move-
ment is confined to planar surfaces and we do not at-
tempt to model the three dimensional freedom of
movement that flying insects have. Therefore, move-
ments only simulate three types of mobility actions,
which are linear movements in two orthogonal direc-
tions and yaw rotations.
3 EXPERIMENT ENVIRONMENT
We were inspired by ethological experimental tech-
niques (Chittka & Tautz 2003; Giurfa 2003; GIURFA
et al. 1999; Horridge 2006; Srinivasan, Zhang &
Lehrer 1998), which typically use shapes and colour
symbols in an artificial environment to discover and
verify the ability of honey bees to memorise route in-
formation. Therefore, we build a physical environ-
ment with a pure colour background and coloured
plastic balls to represent landmarks, and, with the in-
tention of real-life autonomous system application, a
small two-wheeled robot serving as the experiment-
ing artificial bee. Our target object is a simple yellow
ball.
Our Java honeybee system runs on a single-board
computer (SBC), the LattePanda. The LattePanda
runs the Windows 10 operating system, which we
A Cognitive Approach for Reproducing the Homing Behaviour of Honey Bees
547

have chosen for ease of portability of our Street
simulation environment. Ultimately the Street simu-
lation on the Windows platform will be replaced by a
dedicated Street engine implemented in custom hard-
ware.
Motion commands are transmitted to an on-board
Arduino microcomputer, which controls two stepper
motors through two motor-controllers, the A4899. A
Pixy Cam5, which is a camera with in-built detection
of coloured objects, is used as the visual sensor. It
provides position, colour and size information about
any objects detected. An LSM303 compass module
provides information about the magnetic field. The
device includes both an accelerometer and a magne-
tometer, but we don’t use the accelerometer. Both in-
put devices connect to a Micro Arduino Board, and
inputs are provided to the LattePanda through a serial
communication port.
During our experiments, the Honeybee System il-
lustrated in Figure 1, including the Street simulators
running the two agents, runs in a Java environment on
the LattePanda SBC.
The experiment process starts with placing the
honeybee simulating rover at an initial position, rep-
resenting a hive, on our testing ground. Then, the
rover starts with its foraging phase to find the target
object, and as it does so the system records any land-
mark changes. Once the rover reaches the target, it
starts the homing phase based on the experienced
pathway to track back to the original position.
4 SYSTEM BEHAVIOUR
4.1 Foraging
In this phase, the mobility module can generate any
uncoordinated motion instructions, which allow the
rover to explore the surrounding environment until
the target object is located serendipitously. During
this phase of free discovery of the environment, a list
of any objects encountered are recorded in sequence
in the episodic memory of the Memory Agent, in the
previously described.
Figure 3 shows an example of as sequence of
Master Frames after a series of movements. The rover
starts at a position, which is right next to a red ball,
and then it reverses. On its way, two Master Frames
are recorded. MF
_ID2 records that the rover is
close to the red object, and _ID3 records that the
rover is
far from the red ball. Our rover has only cap-
tured an image of a red ball so far, and each set of
these stored elements are triggered by the change of
perceived distance to that red object. Then, the rover
rotates clockwise, and a new Master Frame,
_ID4,
records that two coloured blocks are viewed at the
same time. Both of the objects are at a
far distance
from the rover, and the relative distance between
them is
far. After that, the rover moves forwards,
and Master Frame
_ID5 is created when the rover
sees only the green object, with a
far distance.
A new Master Frame is created only if any visual
information changes, such as changes of perceived
distances and the number of detected objects. Putting
it another way, the system is able to recognise
changes in image properties during the movement,
and it only creates a new Master Record when the
situation changes.
When new elements are generated for a new Mas-
ter Frame in the Working Memory of the Memory
Agent and only when that it happening, an element
containing magnetic information is also created. As
the example in Figure 3 shows, the compass angles
with
_ID4 and _ID5 are different because (_ID4
compass 237) is created at the moment when the
green ball just gets into the frame, and
(_ID5 com-
pass 248)
is recorded when the edge of the red ball
cannot be viewed any more.
4.2 Homing
4.2.1 Homing Strategy
This homing activity is designed to perform in much
the same way as it has been observed to happen in the
ethological experiments. This is to say, our rover is
expected to track back to the starting point, the hive,
by revisiting each recorded Master Frame, the land-
marks, one after another.
Our homing mode is triggered after the target ob-
ject is reached. The first step is to request the last
Master Frame from the memory module as the first
target. Then, the command agent compares this
information with the current visual inputs. If any
elements does not match, the command module
generates motion activities to resolve any differs in
distance.
Actions and instructions are generated as
described in Figure 4. For example, in some cases, the
rover does not detect in its current visual field any ob-
jects of the target Master Frame. In this case, the rover
rotates to match its magnetic orientation to that rec-
orded for the target Master Frame, and then generates
commands to adjust the dirtance, once objects in the
target MF are visualised. If no targeted objects can be
detected even after matching its magnetic orientation
to the MF, the rover continues to rotate. If it still does
not find the target objects after a full circle of rotation,
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
548
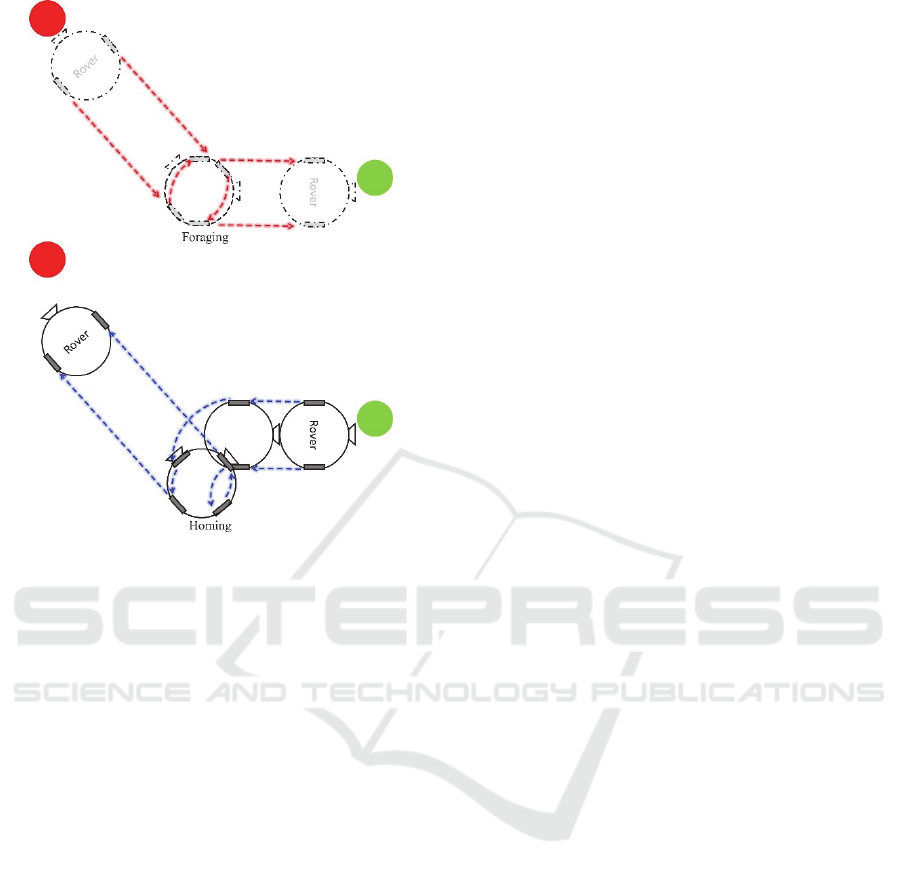
Figure 5.
the agent requests the rover to reverse to gain a
broader view. In some circumstances, the agent
instructs multiple movements, such as both
longitudinal and transversal movements, when more
than two elements are required to be changed in the
current situation. After moving to a position such that
the number of matched objects is same as the number
in the target Master Frame, the command agent deter-
mines that this targeted Master Frame has been
reached and requests the next one from the memory
module. This process repeats until the memory agent
detects that there are no more stored Master Frames,
which means that the original position has been
reached.
4.2.2 Test Method
In order to test homing behaviour, we use a manual
foraging mode, in which we manually move the rover
along a planned route in order to produce a predicta-
ble homing pathway. Once the rover has completed
the planned route, we command the system to enter
the homing mode and start to observe the rover’s
homing performance.
Our initial test has been with single object in the
field of view but we have also tested multiple object
views with linear movements only. We have found
that if objects are at different distances from the rover
the homing navigation movements are more accurate.
This is because there are more references for dis-
tances along the same line.
In the next stage of testing, we allow the rover to
rotate. With this additional freedom of mobility, the
rover can resolve any magnetic orientation differ-
ences recorded between its current position and the
target Master Frame, to find objects that are not in the
current field of view.
4.2.3 Example: Linear Movements with Ro-
tations
To give an illustration, Figure 5 shows an example of
the process. We manually move the rover through a
path such that there are six Master Frames captured
and stacked. While the rover tracks back to the origi-
nal position, it refers to each Master Frame one after
another.
Firstly, the Memory Agent outputs all of the ele-
ments of the last Master Frame, as the first target, to
the Command Agent. It immediately matches up that
the characteristics of the target MF with its current
view, which is a
nextTo distance with a green ball
and a same magnetic angle at the end of. The Com-
mand Agent determines t has been found and requests
the next target MF. This causes the Command Agent
to direct to the rover to reverse to make the distance
to the green object
Close. After that, the Command
Agent receives the third recorded Master Frame, and
the agent directs the rover to perform a reverse right
turn to achieve a far view of the green ball with a dif-
ferent magnetically-determined orientation. This ac-
tion occurs because, when we manually rotate the
rover during the foraging stage, the system records a
new Master Frame at the moment that the green ball
just comes into the field of view, and it is not facing
directly to the green ball yet. Therefore, on the way to
reach this target position, a combined movement is
performed to justify the magnetic orientation and in-
crease in the linear distance to the green ball. The next
target MF contains (
_ID3 RED is_far) and another
change in magnetic orientation, such that the rover
faces the initial direction. Because it can’t initially see
the red ball the rover rotates towards the targeted
orientation. During this anti-clockwise rotation, the
red ball first appears in frame with a
far distance, so
no motion is required to adjust the distance. The next
MF indicates that the red ball should be
close so the
Command Agent instructs the rover to move forward.
It stops moving at the moment when the final Master
Frame is matched and the Memory Agent indicates
A Cognitive Approach for Reproducing the Homing Behaviour of Honey Bees
549

that that this is the end of the route. This homing tra-
jectory route is shown in the lower part of Figure 5.
5 CONCLUSIONS
Our agent-based system shows behaviour with simi-
lar characteristics to the homing behaviour of bees,
and it serves as a proof of concept for our hardware-
based cognitive agent approach. Our system structure
shows the feasibility of a hardware efficient system
that is able to reproduce the cognitive behaviour of a
simple biological system.
This research is extendable in terms of the density
and complexity of the behaviour we reproduce. In-
sects, like honey bees, use many intelligent features,
which have been studied and explained in some detail,
such as the random foraging activity of ants
(Traniello 1989). Our future work will involve mod-
elling more advanced cognitive behaviours of crea-
tures such as the ant, and developing the technology
for implementing Street agents directly in low-power
hardware.
In the longer term we aim to demonstrate that with
the very high speed processing and high levels of
parallelism available in custom microelectronic
hardware, it will possible to use a Street-based
architecture to implement significantly higher levels
of cognitive behaviour than insect foraging.
REFERENCES
Chittka, L & Tautz, J 2003, 'The spectral input to honeybee
visual odometry', Journal of Experimental Biology, vol.
206, no. 14, pp. 2393-2397.
Forgy, CL 1981, OPS5 user's manual, DTIC Document.
Frost, J, Numan, MW, Liebelt, M & Phillips, BJ 2015, 'A
new computer for cognitive computing', Cognitive
Informatics & Cognitive Computing (ICCI* CC), 2015
IEEE 14th International Conference on, IEEE, pp. 33-
38.
Fry, SN & Wehner, R 2002, 'Honey bees store landmarks
in an egocentric frame of reference', Journal of
Comparative Physiology A, vol. 187, no. 12, pp. 1009-
1016.
Gillner, S, Weiß, AM & Mallot, HA 2008, 'Visual homing
in the absence of feature-based landmark information',
Cognition, vol. 109, no. 1, pp. 105-122.
Giurfa, M 2003, 'Cognitive neuroethology: dissecting non-
elemental learning in a honeybee brain', Current
opinion in neurobiology, vol. 13, no. 6, pp. 726-735.
Giurfa, M 2007, 'Behavioral and neural analysis of
associative learning in the honeybee: a taste from the
magic well', Journal of Comparative Physiology A, vol.
193, no. 8, pp. 801-824.
GIURFA, M, HAMMER, M, STACH, S, STOLLHOFF, N,
MÜLLER-DEISIG, N & MIZYRYCKI, C 1999,
'Pattern learning by honeybees: conditioning procedure
and recognition strategy', Animal behaviour, vol. 57, no.
2, pp. 315-324.
Horridge, A 2006, 'Some labels that are recognized on
landmarks by the honeybee (Apis mellifera)', Journal
of insect physiology, vol. 52, no. 11, pp. 1254-1271.
Kiya, T, Kunieda, T & Kubo, T 2007, 'Increased neural
activity of a mushroom body neuron subtype in the
brains of forager honeybees', PLoS One, vol. 2, no. 4, p.
e371.
Koch, C & Laurent, G 1999, 'Complexity and the nervous
system', Science, vol. 284, no. 5411, pp. 96-98.
Labhart, T & Meyer, EP 2002, 'Neural mechanisms in
insect navigation: polarization compass and odometer',
Current opinion in neurobiology, vol. 12, no. 6, pp.
707-714.
Laird, JE 2012, The Soar cognitive architecture, MIT Press.
Menzel, R 2012, 'The honeybee as a model for
understanding the basis of cognition', Nature Reviews
Neuroscience, vol. 13, no. 11, pp. 758-768.
Menzel, R & Giurfa, M 2001, 'Cognitive architecture of a
mini-brain: the honeybee', Trends in cognitive sciences,
vol. 5, no. 2, pp. 62-71.
Menzel, R & Greggers, U 2015, 'The memory structure of
navigation in honeybees', Journal of Comparative
Physiology A, vol. 201, no. 6, pp. 547-561.
Menzel, R, Greggers, U, Smith, A, Berger, S, Brandt, R,
Brunke, S, Bundrock, G, Hülse, S, Plümpe, T &
Schaupp, F 2005, 'Honey bees navigate according to a
map-like spatial memory', Proceedings of the National
Academy of Sciences of the United States of America,
vol. 102, no. 8, pp. 3040-3045.
Numan, MW, Frost, J, Phillips, BJ & Liebelt, M 2015, 'A
Network-based Communication Platform for a
Cognitive Computer',
AIC 2015, p. 94.
Srinivasan, M, Zhang, S & Lehrer, M 1998, 'Honeybee
navigation: odometry with monocular input', Animal
behaviour, vol. 56, no. 5, pp. 1245-1259.
Traniello, JF 1989, 'Foraging strategies of ants', Annual
review of entomology, vol. 34, no. 1, pp. 191-210.
Wajnberg, E, Acosta-Avalos, D, Alves, OC, de Oliveira, JF,
Srygley, RB & Esquivel, DM 2010, 'Magnetoreception
in eusocial insects: an update', Journal of the Royal
Society Interface, vol. 7, no. Suppl 2, pp. S207-S225.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
550
