
On Interaction Quality in Human-Robot Interaction
Suna Bensch
1
, Aleksandar Jevti
´
c
2
and Thomas Hellstr
¨
om
1
1
Department of Computing Science, Ume
˚
a University, Ume
˚
a, Sweden
2
Institut de Rob
`
otica i Inform
`
atica Industrial, CSIC-UPC, Barcelona, Spain
Keywords:
Human-Robot Interaction, Evaluation, Performance.
Abstract:
In many complex robotics systems, interaction takes place in all directions between human, robot, and envi-
ronment. Performance of such a system depends on this interaction, and a proper evaluation of a system must
build on a proper modeling of interaction, a relevant set of performance metrics, and a methodology to combine
metrics into a single performance value. In this paper, existing models of human-robot interaction are adapted
to fit complex scenarios with one or several humans and robots. The interaction and the evaluation process is
formalized, and a general method to fuse performance values over time and for several performance metrics is
presented. The resulting value, denoted interaction quality, adds a dimension to ordinary performance metrics
by being explicit about the interplay between performance metrics, and thereby provides a formal framework
to understand, model, and address complex aspects of evaluation of human-robot interaction.
1 INTRODUCTION
HRI (Human-Robot Interaction) has several impor-
tant similarities with HCI (Human-Computer Inter-
action). Models of interaction created for HCI have
been applied and modified for HRI (Scholtz, 2003),
and research in human factors for HCI are often ap-
plicable also in HRI (Young et al., 2011). As has
been noted also by other authors (Scholtz, 2003; Fong
et al., 2003; Young et al., 2011), HRI also differs from
HCI in several important aspects. For the work in this
paper, the following aspects are of particular interest:
In HRI, several actors may take part, and interaction
in all directions between humans, robots, and environ-
ment has to be considered. This is clearly emphasized
in applications where robots collaborate with humans
to accomplish a common mission, commonly known
as Human-Robot Collaboration (HRC), such as as-
sembling pieces of furniture (Dominey et al., 2009),
or collaborative button-pressing (Breazeal and Hoff-
man, 2004). This highlights the need for updated
models of interaction. Another difference between
HCI and HRI is that the latter often involves sev-
eral types of perception and action - at several levels,
and with several modalities. The diversity of metrics
and assessment methods adds further complexity, not
least for social robots for which not only technical
performance but also social aspects have to be con-
sidered. This highlights the need for a uniform and
formal framework for description of interaction, and
for how several metrics may be combined for evalu-
ation of complex human-robot systems. In this pa-
per we propose an updated model of interaction for
HRI, taking into account the possibility of several hu-
mans and robots acting together. We also formalize
the notion of interaction in the context of HRI, and
use this as a basis for a suggested concept of interac-
tion quality, that combines several performance met-
rics into one measure that indicates fitness of an inter-
action act for a given task. The results are expected
to be valuable for both design and evaluation of HRI.
In Section 2, earlier work on interaction models for
HRI, and suggested metrics for evaluation of HRI are
reviewed. In Section 3, an updated model of HRI is
suggested. A formalism for interaction is presented in
Section 4, followed by a computational derivation of
the concept interaction quality in Section 5. Mecha-
nisms for changes of interaction quality are discussed
in Section 6, and Section 7 concludes the paper with
a discussion and general conclusions.
2 EARLIER WORK
2.1 Modeling HRI
For a long time, robots were machines that humans
gave explicit commands to in order to reach certain
182
Bensch S., JevtiÄ
˘
G A. and HellstrÃ˝um T.
On Interaction Quality in Human-Robot Interaction.
DOI: 10.5220/0006191601820189
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 182-189
ISBN: 978-989-758-219-6
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
OPERATOR
TASK
Actuators
Sensors
Display
Control
Computer
a) b)
Evaluation
Perception
Actions
Intentions
Goals
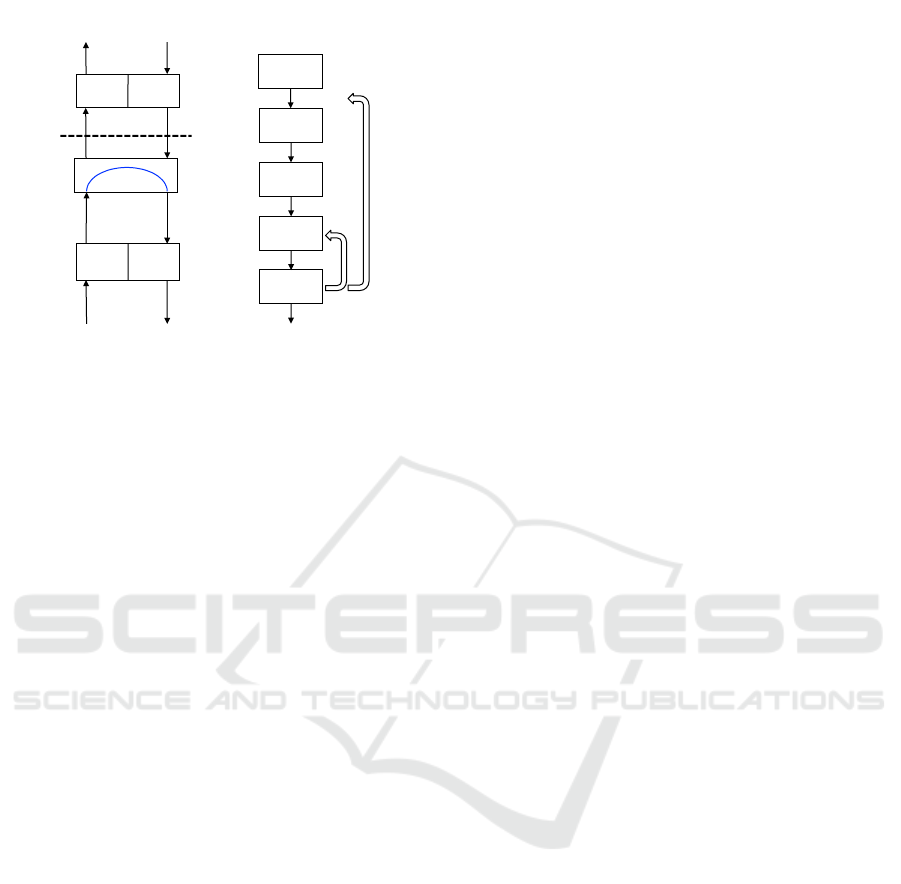
Figure 1: a) Model by (Sheridan, 1992), and b) Norman’s
modified model (Scholtz, 2003; Goodrich and Schultz,
2007) of interaction in a human supervisory control system.
goals. Such systems were appropriately modeled by
simple feedback loops, such as the human supervisory
control systems described in (Sheridan, 1992). Fig. 1a
illustrates how such a robot, comprising a computer,
sensors, and actuators, receives commands from a hu-
man operator through a communication channel (the
dotted line) and a user interface comprising a display
and a control unit. The robot may run at different lev-
els of autonomy (illustrated by the arc), ranging from
manual control through supervisory control, to fully
automatic control. As autonomy increases, more re-
sponsibility is assigned to the computer, and less to
the human, leading to decreased interaction between
human and robot. Regardless of level of autonomy,
human-environment interaction is modeled as medi-
ated through the robot. While this is technically cor-
rect in the case of telerobotics (which was the main
topic of the research in (Sheridan, 1992)), systems for
telepresence (Minsky, 1980; Tsui et al., 2011) aim at
creating the illusion of direct interaction, and the in-
teraction models should therefore reflect this fact.
With the advent of more advanced robots, mod-
els from Human Computer Interaction (HCI) were
adopted to the new field of Human-Robot Interac-
tion (HRI). In (Scholtz, 2003), and also in (Barros
and Lindeman, 2009), Don Norman’s influential “gulf
model” (Norman, 2002) was extended to describe var-
ious types of systems of humans and robots, in which
the human may be supervisor, operator, bystander, or
peer (Scholtz, 2003; Goodrich and Schultz, 2007).
The example in Fig. 1b illustrates interaction between
a robot and a human supervisor. Here interaction is
considered at a higher level than the sensor and actu-
ator data flow modeled in (Sheridan, 1992). Interac-
tion is described in terms of goals, intentions, actions,
perception, and evaluation. Most of the actions are
automatically generated by the robot, and the main
interaction between human and robot is the percep-
tion/evaluation loop, with additional interaction tak-
ing place at higher levels. In (Taha et al., 2011),
Norman’s model was adapted to HRI in another way
by modeling interaction between human and robot
with a POMDP (partially observable Markov deci-
sion process), and state variables intention, status,
satisfaction and task. Such extensions are impor-
tant, but the resulting models still focus on interac-
tion between human and robot, or ignore (or abstract
away) interaction with the environment. This is insuf-
ficient for a complete description of HRI, especially
given insights from behavior-based robotics (Brooks,
1991), and other work (Pfeifer and Scheier, 2001;
Ziemke, 2001; Brooks, 1990) emphasizing the im-
portance of “embodiment”, “situatedness” and robot-
environment interaction.
2.2 Evaluating HRI
Several HCI evaluation techniques have been adopted
and adapted to assess the efficiency and intuitiveness
of HRI designs, such as Goal Directed Task Analy-
sis (Adams, 2005), and Situation Awareness Global
Assessment Technique (Endsley, 1988). The common
approach with user testing in HCI has several spe-
cific drawbacks when applied to HRI (Drury et al.,
2007). To overcome them, so called formal meth-
ods for modeling and evaluation have been developed
in HCI, for instance the Goals, Operations, Methods,
and Selection rules technique (GOMS) (Card et al.,
1983; John and Kieras, 1996). GOMS has also been
adapted to HRI (Drury et al., 2007) as a method to
evaluate and predict efficiency of interfaces in HRI.
While such methods are important tools to predict and
evaluate user-related efficiency of interfaces for tele-
operated and semiautonomous robots, they do not ad-
dress the full range of performance metrics necessary
for a complete evaluation of a complex human-robot
systems. Several metrics for evaluation of systems
comprising humans and robots working together have
been suggested in the literature. An overview can be
found in (Barros and Lindeman, 2009). Goodrich
et al. (Goodrich and Olsen, 2003; Goodrich et al.,
2003) describe principles and metrics focusing on ef-
fective and efficient interaction between teams of hu-
mans and robots. Special focus is on neglect toler-
ance, which quantifies for how long the robot can
work unattended by the user. Steinfeld et al. (Stein-
feld et al., 2006) argue that metrics to a large extent
are task-dependent, and identify suitable metrics for
tasks involving navigation, perception, management,
manipulation, and social functionality. Common met-
On Interaction Quality in Human-Robot Interaction
183

rics for operator performance and robot are also sug-
gested. For operator performance these metrics are
situation awareness (see. e.g. (Scholtz et al., 2005)),
workload, and accuracy of mental models of device
operation. For robot performance, self-awareness, hu-
man awareness, and autonomy are listed as suitable
metrics. For evaluation of the human experience of in-
teracting with a social robot, the following metrics are
suggested: interaction characteristics, persuasiveness,
trust, engagement, and compliance. In (Kahn et al.,
2007), the authors suggest a number of psychological
benchmarks, or “... categories of interaction that cap-
ture conceptually fundamental aspects of human life
...”: autonomy, imitation, intrinsic moral value, moral
accountability, privacy, and reciprocity. These bench-
marks can be used as additional metrics for evalua-
tion of the experience of a human interacting with a
social robot. In (Young et al., 2011) the authors pro-
pose three perspectives on social interaction in HRI:
1. Visceral factors of interaction, such as sadness, joy,
frustration, and fear. 2. Social mechanisms includ-
ing body language, and cultural norms. 3. Long-term
social structures such as social relationships. These
perspectives are suggested as basis for evaluation of
human interaction experiences in HRI. Another anal-
ysis of metrics for social interaction is given in (Feil-
Seifer et al., 2007; Feil-Seifer and Matari
´
c, 2009),
with emphasis on safety and scalability. To summa-
rize, a large number of metrics have been suggested
for evaluation of systems of robots working together
with humans. In (Donmez et al., 2008), the lack of
objective methods for selecting the most efficient met-
rics was recognized, and a list of evaluation criteria
for metrics was presented. Still, there is a lack of a
systematic and formal approach to how a large vari-
ety of metrics should be combined for evaluation of
complex human-robot-environment systems.
3 A MODEL OF HRI
To describe and analyze HRI involving in particular
social robots, that work close to humans, we con-
sider a model in which interaction is seen as an in-
terplay between human(s), robot(s), and environment
(see Fig. 2). Interaction takes place between all parts,
and in all directions. In social robotics, interaction be-
tween human and robot goes well beyond pure tech-
nical sensor data and actuator commands, and com-
parisons with human-human interaction has been sug-
gested (Kr
¨
amer et al., 2012; Hiroi and Ito, 2012). A
social robot may both perceive and express emotions
such as joy, boredom, trust, and fear, and also other
high-level properties such as tiredness and attention.
Human
Robot
Environment
Remote
Human
Local
Robot
Local
Environment
Local
Human
a) b)
Figure 2: Proposed model of Human-Robot Interaction.
a) Interaction between a human, robot, and environment lo-
cated at the same place. b) A remote human added, for
instance for telerobotics. In both cases, interaction with the
environment is modeled as direct, although the exchange of
information might be indirect via a communication link.
Furthermore, interaction with such robots are not only
about giving explicit commands that the robot then
executes, and may also contain modes of interaction
so far reserved for human-human interaction. For in-
stance, a human may communicate verbally with a
robot not by an imperative command such as “Bring
me a glass of water”, but by a declarative statement
such as “I am thirsty”. Hence, the arrows in Fig. 2
should be understood as interaction at a higher level
than the exchange of sensor and actuator data referred
to in the models of the kind illustrated in Fig. 1a.
Fig. 2a shows a model with one human and one robot,
for instance a domestic service robot. Several other
combinations of single or multiple humans and robots
are possible, where both humans and robots act as ei-
ther individuals or in teams (Yanco and Drury, 2004).
The model can, for such scenarios, be extended in
a straightforward fashion. Fig. 2b shows a telepres-
ence scenario, with one remote human controlling a
local robot that interacts with a local human. Both
humans and the robot are considered as agents, inter-
acting with each other and the environment. Note that
the remote human is considered to interact directly
with the local human, robot, and environment, al-
though the underlying physical information flow sug-
gests that interaction between the local and remote
side is mediated through the robot. This is an exten-
sion to earlier models that either do not include en-
vironment at all, such as in Fig. 1b and in (Scholtz,
2003; Olsen and Goodrich, 2003), or do not con-
sider direct human-environment interaction, such as
in Fig. 1a and in (Sheridan, 1992).
4 FORMALIZING INTERACTION
To describe and formalize interaction between agents
we will introduce some definitions to break down the
fuzzy concept of interaction. An interaction event e
t
for a time interval t is defined as a tuple of perceived
information and associated actions, for one or several
agents. For instance, a human perceiving darkness
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
184
and deciding to switch on the light may be regarded
as an interaction event. Another example is a social
robot that perceives that a human is sad and therefore
suggests to call a relative. Yet another example is a
human passing over on object to a robot. This exam-
ple involves two agents perceiving and acting simul-
taneously during the same event.
An interaction act a is defined as an ordered se-
quence [e
t
, e
t+1
, ...] of interaction events. For each in-
teraction event, the decision process that leads to a
chosen action may depend not only on the currently
perceived data, but also on the perception history,
the agent’s state, prior knowledge, and of course the
robot’s general capabilities. Highly decisive is also
the current goal or intention of the robot. For instance,
a robot aiming at moving to a new location primarily
chooses its action based on this navigational task.
A robot often makes a totally different assessment
of a situation than does a human, and there are big
differences also between humans. Even for one spe-
cific human, the way to act may depend on a huge
number of time-varying factors such as mood, level
of attention, level of tiredness, degree of happiness,
anger, and even chance. Hence, several alternative
interaction events are plausible for a given perceived
information. For the continued analysis, we will use
two examples of interaction, involving one robot and
one or two humans interacting with each other. For a
given time t, alternative interaction events are denoted
e
∗
t
, e
∗∗
t
, e
∗∗∗
t
, etc.
Example 1:
A service robot R is programmed with the general
goal of assisting an older male adult H with various
domestic tasks in the apartment. H is sitting in his
chair, feels a bit tired, and wants a cup of coffee. Ta-
ble 1 lists some of several possible interaction events.
Four (of several possible) interaction acts based
on these events are a
1
= [e
∗
1
, e
∗
2
], a
2
= [e
∗
1
, e
∗∗
2
], a
3
=
[e
∗
1
, e
∗
2
, e
∗
3
], a
4
= [e
∗∗
1
, e
∗
2
, e
∗
3
], a
5
= [e
∗
1
, e
∗∗∗
2
], a
6
=
[e
∗∗
1
, e
∗∗∗
2
]. Several other interaction events and inter-
action acts exist with other combinations of R’s per-
ception of H. Note that a specific interaction event
may occur for several different reasons. For instance,
e
∗
3
can occur because R did not hear what H said (a
3
),
or because H did not say anything (a
4
). Similarly,
e
∗∗∗
2
may occur because R did not hear what H said
(a
5
), or H did not say anything (a
6
).
Example 2:
A remote user H
r
teleoperates a robot R within
an environment containing a human H. Table 2 lists
some of several possible interaction events.
Two possible interaction acts based on these
Table 1: Interaction events for Example 1.
Interaction
event
Event description (percepts and ac-
tions)
e
∗
1
H says “Robot, please help me
make some coffee in the kitchen!”,
stands up and starts walking.
e
∗∗
1
H stands up and starts walking.
e
∗
2
R makes the assessment that H is
tired (based on facial expression
analysis) and slowly moves along-
side H in order to provide physical
support during the walk.
e
∗∗
2
R does not make any assessment of
H’s level of tiredness (since the face
of H is not visible) and moves after
H towards the kitchen, in order not
to be in the way.
e
∗∗∗
2
R does nothing.
e
∗
3
R asks H where he wants to go.
Table 2: Interaction events for Example 2.
Interaction
event
Event description (percepts and ac-
tions)
e
∗
1
H
r
teleoperates R towards H while
asking H how he feels today.
e
∗∗
1
H
r
initiates autonomous navigation
such that R moves by itself towards
H. At the same time, H
r
asks H
how he feels today.
e
∗
2
H tells H
r
that everything is ok.
e
∗
3
H
r
asks H if he will watch TV.
e
∗∗
3
H
r
notices that H looks sad and
asks him if he would like to join for
shopping today.
events are a
1
= [e
∗
1
, e
∗
2
, e
∗
3
] and a
2
= [e
∗∗
1
, e
∗
2
, e
∗∗
3
]. Note
that e
∗∗
3
is less likely to happen after e
∗
1
than after e
∗∗
1
since H
r
in the former case has to focus on teleop-
eration and not on interacting with H (research indi-
cates that teleoperation degrades performance for ad-
ditional tasks (Chen, 2010; Glas et al., 2012)). The
examples illustrate that entire interaction acts, and not
individual interaction events, often have to be consid-
ered to be able to compare and evaluate interaction.
For instance, the qualitative difference between e
∗
1
and
e
∗∗
1
in Example 2 does not appear until two events
later (e
∗
3
or e
∗∗
3
). Concerns related to how interaction
events should be defined are discussed in Section 7.
5 INTERACTION QUALITY
To evaluate the fitness of an interaction act a for a spe-
On Interaction Quality in Human-Robot Interaction
185

cific task q, we introduce the term interaction quality
denoted by the function INQ(a, q). In this section we
will investigate the nature of the function INQ.
To compute fitness, metrics such as those de-
scribed in Section 2.2 are obviously useful. Most of-
ten, several perspectives have to be considered simul-
taneously. Robot performance such as speed and ac-
curacy are often of primary concern, but also perfor-
mance related to the experience of the involved hu-
mans are often considered important. For instance,
situational awareness for an operator controlling a
robot from distance, or the feeling of safety for a hu-
man having a robot as social companion may be rel-
evant aspects to consider. In most cases, interaction
with the environment plays an important role. Each
perspective often needs several metrics for a thorough
evaluation. Applying metric m on a given interaction
act a gives us a performance value denoted P(m). For
a given task q with N required metrics we define the
vector of all performance values:
P = (P(1), ..., P(N)). (1)
Assessing fitness of an act requires considering all
metrics at once. Hence, INQ can be written as a fu-
sion function F that combines all performance values
into a single measure:
INQ(a, q) = F(P). (2)
The task description q should include a specification
of F, including information about the relative impor-
tance of all involved metrics. For some metrics, per-
formance is most naturally expressed for each inter-
action event separately, and performance may vary
from event to event. The influence of an individual
interaction event on the performance of the entire in-
teraction act sometimes depends on for how long the
event is active. For instance, a short interaction event
with high operator workload caused by low level of
automation may be compensated by other events with
higher level of automation and correspondingly lower
operator workload. However, in some cases a very
low performance during an interaction event disqual-
ifies the entire interaction act, for instance in a nav-
igation task in which the robot initially fails to per-
ceive the instruction from the user on where to go. In
the general case, a fusion mechanism f
m
is needed to
combine performance measured with metric m for in-
dividual interaction events into one measure for the
entire interaction act (note that different fusion mech-
anisms may be necessary for different metrics, hence
the subscript m):
P(m) = f
m
(p
m
) (3)
where
p
m
= (p
m
(1), ..., p
m
(|a|)) (4)
and p
m
(i) is the performance value for event i in in-
teraction act a, computed with metric m. |a| denotes
the number of interaction events in interaction act a.
Note that P, P(i), p
m
, and p
m
(i) all depend on
both q and a, but these dependencies have been left
out in the notation for brevity. The computations and
relations described above are graphically illustrated
in Fig. 3. An interaction act a is divided into in-
teraction events numbered 1, ..., |a|. For each metric
m of the in total N metrics, performance measures
p
m
(1), ..., p
m
(|a|) are computed at event level, and
fused by the functions f
m
to one measure P(m) for
the entire interaction act. The P values for all N met-
rics are finally fused by the function F to INQ(a, q),
the interaction quality for interaction act a when per-
forming task q. Also the function F has to be defined
in an task-dependent way. F and f
m
may for instance
be weighted averages, min, or max functions.
To summarize, performance values p(i) for each
metric i are first computed for all interaction events,
and then fused over time to form P(i). In this way,
the temporal aspects of the interaction are considered.
All P(i) are then fused to form the overall interac-
tion quality INQ. For some applications, an alter-
native formulation is more intuitive. In this formu-
lation, fusion is first done over all performance val-
ues p
1
(i), ..., p
N
(i) for each interaction event i. These
values are then fused with each other to form INQ.
With reference to Fig. 3, this corresponds to hav-
ing the functions f
m
operating on columns instead of
rows. With this formulation, the trade-off between
for instance user friendliness and speed of execution
at a specific instance in time may be more easily ex-
pressed. On the other hand, the trade-off between low
and high performance, measured by the same metric
for each event in the act, would be harder to express
with this formulation. For practical implementation
of the proposed framework, the choice of most suit-
able formulation depends on the specific task, and the
preferred performance measures.
p
1
1
( )
p
1
2
( )
... p
1
a
( )
= p
1
→
... ... ...
p
m
1
( )
p
m
2
( )
... p
m
a
( )
= p
m
→
... ... ...
p
N
1
( )
p
N
2
( )
... p
N
a
( )
= p
N
→
f
1
f
m
f
N
Interaction events in interaction act a
1 2
a
Performance by metric #
1
m
N
P → INQ(a, q)
F
P(1)
P(m)
P(N )
Figure 3: Derivation of interaction quality INQ(a, q) for an
interaction act a when performing task q. N metrics are used
to compute performance related to both robot and human.
Fusion of performance is done first at event, and then at
metric level by the functions f
i
and F respectively.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
186

6 DISCUSSION
Interaction quality depends on static and dynamic
properties of the involved human(s), robot(s), and en-
vironment. As such it is relevant for both design and
real-time operation of a robot. During iterative de-
sign of a robot, interaction quality should be a primary
concern when evaluating selected hardware compo-
nents and programmed basic behaviors. During op-
eration of a robot, the effect on interaction quality
should be considered in all operations that influence
the robot’s actions and decision. This becomes par-
ticularly complex when considering the dynamic na-
ture of an interaction system. The list below gives a
few examples of changes in an interaction system that
may influence interaction quality:
The human(s) may
• get tired, exhausted, impatient, or distracted.
• have a cup of coffee or take a nap.
• get distracted by other humans or environment.
• get scared of (or attracted by) the robot.
The robot(s) may
• decide to include a new sensor in the multi-modal
perception system.
• change the level of autonomy, either under manual
control or automatically.
• change relative priorities for tasks.
The environment is dynamic and
• typically changes in many respects as the human
or robot moves to new locations.
• physical entities such as illumination, background
noise, and floor conditions may change.
• external humans may start interacting with the hu-
man and/or robot.
• external humans may modify the environment,
e.g. by moving pieces of furniture.
The influence of such internal and external
changes is often intertwined, such that several per-
formance measures are affected by the same change.
Consider as an example a collaborative task with a
robot emptying a dishwasher and a human placing
the items in a cupboard. Increased background noise
(change in the environment) will affect verbal interac-
tion between the robot and the human. This leads to
impatience and lowered human attention and also to
misunderstandings in the robot’s interpretations of the
human’s verbal commands. The result will be low-
ered performance measures for the human in terms
of user satisfaction and for the robot in terms of task
fulfillment. By properly designing the fusion func-
tions f
i
and F, such interdependencies can be iden-
tified and dealt with, both during design of the robot,
and in real-time. Performance for varying settings can
be simulated, and optimization procedures can be em-
ployed to maximize interaction quality.
Different performance metrics sometimes vary
in different directions when a design parameter is
changed. As an example, consider a teleoperation
task in which an operator should navigate the robot
in a fast and safe manner. The operator’s workload
typically increases as the speed of the robot increases,
such that certain operator related performance mea-
sures decreases. At the same time, robot performance,
measured by two metrics, vary in two directions as
a function of speed; task achievement increases, and
safety concern decreases. Another example is a hu-
man interacting verbally with a robot while walking
on a slippery road. Just as in human-human interac-
tion, the human may suddenly decide to focus on in-
teracting efficiently with the environment in order not
to fall. This causes performance related to communi-
cation between the human and the robot to decrease,
and performance related to interaction between the
human and the environment to increase. This exam-
ples illustrates how interaction quality often changes
as a result of conscious decisions made and actions
taken by the participating agents. Mechanisms that
take changes of interaction quality into account may
be included in the robot design, such that the robot
changes behavior and character in order to maintain
or increase overall interaction quality. One such ex-
ample is sliding autonomy, in which the robot, au-
tonomously or under human control, may increase
its level of autonomy such that the remote user gets
less involved in the physical control of the robot, and
thereby can focus more on social interaction with the
local user (Chen, 2010; Glas et al., 2012). In this case,
the interaction quality changes due to several mecha-
nisms. Performance related to human experience in-
creases, while performance related to goal achieve-
ment for the robot decreases if the obstacle avoid-
ance system slows down or even stops the robot in
a crowded environment that a human operator would
easily navigate through.
Granularity and appropriate chunking of events
are essential for successful deployment of the pro-
posed methodology. Interaction events can be defined
at different levels of granularity. For the purpose of
performance evaluation, events should be so short that
further division into sub events would yield identical
performance values for the sub events. For instance,
event e
∗
2
in Example 1 above could in principle be di-
vided into several shorter events since the robot’s ac-
On Interaction Quality in Human-Robot Interaction
187

tions consist of a lot of low-level interaction with both
H and the environment. However, interaction during
these shorter events would be affected by design pa-
rameters and environment in a uniform way, and yield
similar performance values as the undivided event. At
the same time, an event should be so long that its per-
formance values would be affected if the event would
be further extended. For instance, e
∗
2
and e
∗
3
are af-
fected by design parameters and environment in dif-
ferent ways, and merging these events into one would
yield a different performance value.
7 CONCLUSIONS
The need to distinguish between performance at event
and act level was discussed in (Olsen and Goodrich,
2003) and exemplified with a navigational task: “A
robot might be getting closer to the target very rapidly
and yet be wandering into a cul-de-sac from which
it will need to back out”. In such a case, perfor-
mance at the event level will be very high, except for
the events at which the robot has reached the dead-
end. However, careful design of the fusion function
f , should take the overall goal into account and result
in a low overall performance at the act level. The pro-
posed formalism highlights this kind of complex sit-
uations that may occur when evaluating performance
of human-robot systems.
The introduced concept interaction quality is com-
puted as a combination of several performance met-
rics. As such, it could be seen as nothing more than
another way to compute performance for a human-
robot system. However, we argue that the new con-
cept adds a dimension by being explicit about the in-
terplay between performance metrics. Fusion of per-
formance is done over time by the functions f
i
, and
over metrics by the function F. In a complex sys-
tem, possibly involving several robots and humans, a
multitude of different performance metrics often have
to be considered simultaneously. In many cases, they
may be affected by modifying design parameters, and
in many cases they vary due to changes in human and
robot behavior, and in the environment. Often, trade-
offs between conflicting performance measures have
to be dealt with. Interaction quality and the proposed
fusion mechanisms, working both over time and over
different metrics, provide a formal framework to un-
derstand, model, and address these aspects of human-
robot interaction. Apart from the general value of
highlighting and formalizing these matters, the pre-
sented methodology may be implemented and used
both for real-time optimization, and as a tool in de-
sign and evaluation of human-robot interaction. The
practical value will be demonstrated and evaluated in
real-world scenarios as part of future work.
ACKNOWLEDGEMENTS
This work was funded by the VINNOVA project
2011-01355, the EC project SOCRATES under
MSCA-ITN-2016 grant agreement No 721619, and
the SAMMIR project funded by CSIC, Spain, under
the project reference number I-LINK1082.
REFERENCES
Adams, J. A. (2005). Human-robot interaction design: Un-
derstanding user needs and requirements. In Proceed-
ings of the Human Factors and Ergonomics Society
Annual Meeting, volume 49, pages 447–451.
Barros, P. D. and Lindeman, R. (2009). A survey of user
interfaces for robot teleoperation. Retrieved from:
http://digitalcommons.wpi.edu/computerscience-
pubs/21.
Breazeal, C. and Hoffman, G. (2004). Robots that work
in collaboration with people. In Proceedings of AAAI
Fall Symposium on The Intersection of Cognitive Sci-
ence and Robotics: From Interfaces to Intelligence.
Brooks, R. (1991). Intelligence without representation. Ar-
tificial Intelligence, 47:139–159.
Brooks, R. A. (1990). Elephants don’t play chess. Robotics
and Autonomous Systems, 6:3–15.
Card, S., Moran, T., and Newell, A. (1983). The Psychology
of Human-Computer Interaction. Erlbaum, Hillsdale,
New Jersey.
Chen, J. Y. C. (2010). Robotics operator performance in
a multi-tasking environment. In Barnes, M., editor,
Human-Robot Interactions in Future Military Opera-
tions. Ashgate.
Dominey, P. F., Mallet, A., and Yoshida, E. (2009). Real-
time spoken-language programming for cooperative
interaction with a humanoid apprentice. Interna-
tional Journal of Humanoid Robotics, 06(02):147–
171, http://dx.doi.org/10.1142/S0219843609001711.
Donmez, B., Pina, P. E., and Cummings, M. L. (2008).
Evaluation criteria for human-automation per-
formance metrics. In Proceedings of the 8th
Workshop on Performance Metrics for Intel-
ligent Systems, PerMIS ’08, pages 77–82,
http://dx.doi.org/10.1145/1774674.1774687, New
York, NY, USA. ACM.
Drury, J. L., Scholtz, J., and Kieras, D. (2007). The potential
for modeling human-robot interaction with GOMS. In
Sarkar, N., editor, Human-Robot Interaction, pages
21–38. I-Tech Education and Publishing.
Endsley, M. R. (1988). Design and evaluation for situa-
tion awareness enhancement. In In Proceedings of the
Human Factors Society 32nd Annual Meeting, Santa
Monica, CA.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
188

Feil-Seifer, D. and Matari
´
c, M. J. (2009). Encyclopedia
of Complexity and System Science, chapter Human-
Robot Interaction, pages 4643–4659. Springer.
Feil-Seifer, D., Skinner, K., and Matari
´
c, M. J. (2007).
Benchmarks for evaluating socially assistive robotics.
Interaction Studies, 8(3):432–439.
Fong, T., Thorpe, C., and Baur, C. (2003). Collabora-
tion, dialogue, human-robot interaction. In Jarvis,
R. A. and Zelinsky, A., editors, Robotics Research:
The Tenth International Symposium, pages 255–266,
http://dx.doi.org/10.1007/3–540–36460–9 17, Berlin,
Heidelberg. Springer Berlin Heidelberg.
Glas, D., Kanda, T., Ishiguro, H., and Hagita, N.
(2012). Teleoperation of multiple social robots.
Systems, Man and Cybernetics, Part A: Systems
and Humans, IEEE Transactions on, 42(3):530–544,
http://dx.doi.org/10.1109/TSMCA.2011.2164243.
Goodrich, M. A., Crandall, J. W., and Stimpson, J. L.
(2003). Neglect tolerant teaming: Issues and dilem-
mas. In Proceedings of the 2003 AAAI Spring Sympo-
sium on Human Interaction with Autonomous Systems
in Complex Environments.
Goodrich, M. A. and Olsen, D. R. (2003). Seven prin-
ciples of efficient human robot interaction. In Sys-
tems, Man and Cybernetics, 2003. IEEE International
Conference on, volume 4, pages 3942–3948 vol.4,
http://dx.doi.org/10.1109/ICSMC.2003.1244504.
Goodrich, M. A. and Schultz, A. C. (2007).
Human-robot interaction: A survey. Found.
Trends Hum.-Comput. Interact., 1(3):203–275,
http://dx.doi.org/10.1561/1100000005.
Hiroi, Y. and Ito, A. (2012). Informatics in Control,
Automation and Robotics: Volume 2, chapter Toward
Human-Robot Interaction Design through Human-
Human Interaction Experiment, pages 127–130,
http://dx.doi.org/10.1007/978–3–642–25992–0 18.
Springer Berlin Heidelberg, Berlin, Heidelberg.
John, B. E. and Kieras, D. E. (1996). Using GOMS for user
interface design and evaluation. ACM Transactions on
Human-Computer Interaction, 3(4).
Kahn, P. H., Ishiguro, H., Friedman, B., Freier, N. G., Sev-
erson, R. L., and Miller, J. (2007). What is a hu-
man? toward psychological benchmarks in the field
of human-robot interaction. interaction studies: Social
behaviour and communication in. Biological and Ar-
tificial Systems, pages 1–5.
Kr
¨
amer, N. C., P
¨
utten, A., and Eimler, S. (2012). Human-
Agent and Human-Robot Interaction Theory: Similar-
ities to and Differences from Human-Human Interac-
tion, pages 215–240, http://dx.doi.org/10.1007/978–
3–642–25691–2 9. Springer Berlin Heidelberg,
Berlin, Heidelberg.
Minsky, M. (1980). Telepresence. Omni, 2(9):45–52.
Norman, D. A. (2002). The Design of Everyday Things.
Basic Books, Inc., New York, NY, USA.
Olsen, D. R. and Goodrich, M. A. (2003). Metrics for
evaluating human-robot interaction. In Proceeedings
of NIST Performance Metrics for Intelligent Systems
Workshop.
Pfeifer, R. and Scheier, C. (2001). Understanding Intelli-
gence. MIT Press.
Scholtz, J. (2003). Theory and evaluation of
human robot interactions. In System Sci-
ences, 2003. Proceedings of the 36th Annual
Hawaii International Conference on, pages 10–,
http://dx.doi.org/10.1109/HICSS.2003.1174284.
Scholtz, J., Antonishek, B., and Young, J. (2005). Im-
plementation of a situation awareness assessment
tool for evaluation of human-robot interfaces. Sys-
tems, Man and Cybernetics, Part A: Systems and
Humans, IEEE Transactions on, 35(4):450–459,
http://dx.doi.org/10.1109/TSMCA.2005.850589.
Sheridan, T. B. (1992). Telerobotics, Automation, and Hu-
man Supervisory Control. MIT Press, Cambridge,
MA, USA.
Steinfeld, A., Fong, T., Kaber, D., Lewis, M., Scholtz,
J., Schultz, A., and Goodrich, M. A. (2006). Com-
mon metrics for human-robot interaction. In Pro-
ceedings of the 1st ACM SIGCHI/SIGART Confer-
ence on Human-robot Interaction, HRI06, pages 33–
40, http://dx.doi.org/10.1145/1121241.1121249, New
York, NY, USA. ACM.
Taha, T., Miro, J., and Dissanayake, G. (2011). A POMDP
framework for modelling human interaction with as-
sistive robots. In Robotics and Automation (ICRA),
2011 IEEE International Conference on, pages 544–
549, http://dx.doi.org/10.1109/ICRA.2011.5980323.
Tsui, K. M., Desai, M., Yanco, H. A., and Uhlik, C.
(2011). Exploring use cases for telepresence robots.
In Proceedings of the 6th International Conference
on Human-robot Interaction, HRI ’11, pages 11–
18, http://dx.doi.org/10.1145/1957656.1957664, New
York, NY, USA. ACM.
Yanco, H. and Drury, J. (2004). Classifying human-
robot interaction: an updated taxonomy. In Sys-
tems, Man and Cybernetics, 2004 IEEE Interna-
tional Conference on, volume 3, pages 2841–2846 ,
http://dx.doi.org/10.1109/ICSMC.2004.1400763.
Young, J. E., Sung, J., Voida, A., Sharlin, E., Igarashi, T.,
Christensen, H., and Grinter, R. (2011). Evaluating
human-robot interaction: Focusing on the holistic in-
teraction experience. International Journal on Social
Robotics, 3(1):53–67.
Ziemke, T. (2001). Are robots embodied? In Balkenius,
Zlatev, Dautenhahn, Kozima, and Breazeal, editors,
Proceedings of the First International Workshop on
Epigenetic Robotics - Modeling Cognitive Develop-
ment in Robotic Systems, volume 85, pages 75–83,
Lund, Sweden. Lund University Cognitive Studies.
On Interaction Quality in Human-Robot Interaction
189
