
Evaluation of Deep Image Descriptors for Texture Retrieval
Bojana Gajic
1
, Eduard Vazquez
2
and Ramon Baldrich
1
1
Computer Vision Center, Universitat Autonoma de Barcelona, Bellaterra, Spain
2
Cortexica Vision Systems, Suite 704 Capital Tower, 91 Waterloo Road, SE1 8RT, London, U.K.
bgajic@cvc.uab.es, eduard.vazquez@cortexica.com, ramon@cvc.uab.es
Keywords:
Texture Representation, Texture Retrieval, Convolutional Neural Networks, Psychophysical Evaluation.
Abstract:
The increasing complexity learnt in the layers of a Convolutional Neural Network has proven to be of great
help for the task of classification. The topic has received great attention in recently published literature.
Nonetheless, just a handful of works study low-level representations, commonly associated with lower lay-
ers. In this paper, we explore recent findings which conclude, counterintuitively, the last layer of the VGG
convolutional network is the best to describe a low-level property such as texture. To shed some light on this
issue, we are proposing a psychophysical experiment to evaluate the adequacy of different layers of the VGG
network for texture retrieval. Results obtained suggest that, whereas the last convolutional layer is a good
choice for a specific task of classification, it might not be the best choice as a texture descriptor, showing a
very poor performance on texture retrieval. Intermediate layers show the best performance, showing a good
combination of basic filters, as in the primary visual cortex, and also a degree of higher level information to
describe more complex textures.
1 INTRODUCTION
Convolutional Neural Networks (ConvNets) have rev-
olutionised the field of Computer Vision in the last
few years. Becoming a breakthrough in the accuracy
achieved since 2009 and most remarkably since ima-
geNet 2012 (Russakovsky et al., 2015) with AlexNet
(Krizhevsky et al., 2012), ConvNets have been con-
stantly evolving with new architectures as VGG (Si-
monyan and Zisserman, 2014), GoogLeNet (Szegedy
et al., 2015) or Residual Networks (He et al., 2015)
among others. Representations learnt by ConvNets
have overtaken classic hand-crafted descriptors such
as scale-invariant feature transform (SIFT) (Lowe,
2004) and all its variations or speeded up robust fea-
tures (SURF) (Bay et al., 2006). The main advan-
tage is that ConvNets learn non-linear transformations
and adapt, whereas hand-crafted descriptors were de-
signed a priori thinking on image properties that could
in principle generalise to any object or class.
Whereas the topic of classification is one of the
main focuses of attention in existing literature along
with localisation (Ren et al., 2015), segmentation
(Zheng et al., 2015) or tracking (Wang and Yeung,
2013), low-level representations as obtained by Con-
vNets have attracted limited attention. The question is
whether these deep representations are equally valid
to describe a low-level property such as texture, typi-
cally represented with hand-crafted descriptors as Lo-
cal Binary Pattern methods (Ojala et al., 2002), Ga-
bor and wavelet based approaches (Wu et al., 2000)
among many others (Mikolajczyk and Schmid, 2005).
The nature of the representations learnt in Con-
vNets gradually varies from the lower to the last layer.
It goes from simple representations to more complex
ones in subsequent layers, gradually increasing its
semantical meaning (Zeiler and Fergus, 2014). In
other words, we see a gradual increase from low-level
to high-level representations. Discriminative models
aim to find the borders between classes, not to model
joint probability distributions as a generative model
aims to do (Jordan, 2002). This semantical meaning
relates much closely to the classes to be recognised,
better separating one class to the other in the feature
space, being one of the factors explaining the great
success of ConvNets in the aforementioned tasks.
In this context, where semantics and classes are
closely related to the representations learnt we want
to address one question: how good are the low-level
representations learnt? Some of the weights learnt in
lower layers are similar to common approaches used
to describe textures such as Gabor filters and other
low-level representations (Wu et al., 2000). With this
knowledge, the assumption would be that the lower
Gajic B., Vazquez E. and Baldrich R.
Evaluation of Deep Image Descriptors for Texture Retrieval.
DOI: 10.5220/0006129302510257
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 251-257
ISBN: 978-989-758-226-4
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
251

layers should be better to represent textures than the
latest ones. This subject has received little atten-
tion in recently published literature, although some
works can be found exploring this topic (Gan et al.,
2015), (Cimpoi et al., 2014), (Cimpoi et al., 2016).
For the problem that this paper explores, results ob-
tained in the second and third publications are of
great interest, since the authors defined as a gold stan-
dard texture representation a descriptor derived from
the fifth convolutional layer of a VGG network (Si-
monyan and Zisserman, 2014). That is, that opposed
to what intuition might say, the initial layers seem to
be worse for texture. The evaluation of this represen-
tations is tested in the paper by running a classifica-
tion experiment. Nonetheless, textures are a percep-
tual property, therefore less related with semantics.
Can be then concluded, using a classification exper-
iment, that the best descriptor for textures is derived
from a high-level representation with a remarkable se-
mantical component?
In this paper, we aim to shed some light on this
problem by proposing an experiment more closely re-
lated with perception as it is image retrieval. The
difference with other works focused on retrieval
(Babenko et al., 2014) and the present work, is that
here we perform a psychophysical experiment to eval-
uate texture retrieval in which we asses the capability
to describe textures by different layers.
This paper is organised as follow. In section 2 we
explain the motivation behind running a psychophys-
ical experiment based on image retrieval as opposed
to a classification experiment. Subsequently, in sec-
tion 3 the psychophysical experiment is defined and
results obtained are presented in section 4. Finally,
conclusions are drawn in section 5.
2 CLASSIFICATION VERSUS
RETRIEVAL FOR LOW-LEVEL
DESCRIPTORS
The fact that the best descriptor for texture is derived
from a layer with strong semantical meaning, there-
fore, goes against the initial intuition after observing
the weights learnt in ConvNets as clearly shown in
(Zeiler and Fergus, 2014). Texture is a low-level per-
ceptual property. We know that we perceive orienta-
tions and scales in a particular way in V1 (Rust et al.,
2005) and that it explains the way we process images
at a low level. In this early stage, semantics do not
play an important role. Actually, texture perception is
not as much related to semantic meaning, but a con-
tinuous space where just some areas can be named.
Can then a strongly semantical representation be the
best one to describe textures?
There is no doubt that the representation found in
(Cimpoi et al., 2016) works well to classify a specific
set of textures. However, it is not clear that such repre-
sentation is the best way to describe a perceptual, low-
level world. Image retrieval does not include classes,
and therefore is a different task than that of classifying
semantic sets, being much more suitable to evaluate a
perceptual descriptor.
3 EXPERIMENTAL SETUP
The experiment presented in this article aims to verify
the assessment that the representations derived from
the latest deep convolutional layers of a ConvNet are
in fact the most suitable for textures. The authors in
(Cimpoi et al., 2016) affirm that most of the perfor-
mance gain is realised in the very last few layers. To
avoid the introduction of other variables and different
settings, we are limiting our psychophysical exper-
iment following the procedures and using the same
data as used in the referred work. The difference, as
explained in section 1, is that we evaluate the quality
of the descriptors in the context of image retrieval.
3.1 Texture Descriptors
In order to get the best representations of texture on
images, we follow (Cimpoi et al., 2016) and use deep
convolutional features as local image descriptors.
These features are extracted from each of the outputs
of convolutional layers of ConvNets pretrained on Im-
ageNet ILSVRC data (Deng et al., 2009). We consid-
ered both VGG-M and VGG-VD network architec-
tures, as proposed in the referred work. In this exper-
iment, we want to evaluate the suitability of different
representations for texture retrieval. The number of
layers in VGG-M suffices to this aim. Conclusions
extracted with current experiment can be extended to
deeper architectures, such as VGG-VD, since in terms
of representations for each layer, it follows exactly the
same principles.
As detailed in (Cimpoi et al., 2016), represen-
tations extracted from each convolutional unit are
pooled into a Fisher vector (Perronnin and Dance,
2007) representation with 64 Gaussian components.
The dimensionality of the representation space range
from 12k to 65k, depending on the layer. As the num-
ber of dimensions of these descriptors is too high,
they are supposed to be very redundant. Conse-
quently, the descriptors are compressed by principal
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
252
component analysis (PCA) to size of 4096 dimen-
sions, as proposed in (Cimpoi et al., 2016). After
dimensionality reduction, the descriptors are L2 nor-
malized.
To summarise, in the experiment we compare five
different descriptors, one per convolutional layer. Our
aim is to verify if the descriptors that obtain better re-
sults on classification provide better retrieval results.
3.2 Dataset
In the process of finding the best dataset for texture re-
trieval task, we considered currently available texture
datasets. Many of them were concentrated on ma-
terial (FMD (Sharan et al., 2013), KTH-TIPS2 (Ca-
puto et al., 2005), CUReT (Dana et al., 1999)). The
only dataset that contains texture images is Describ-
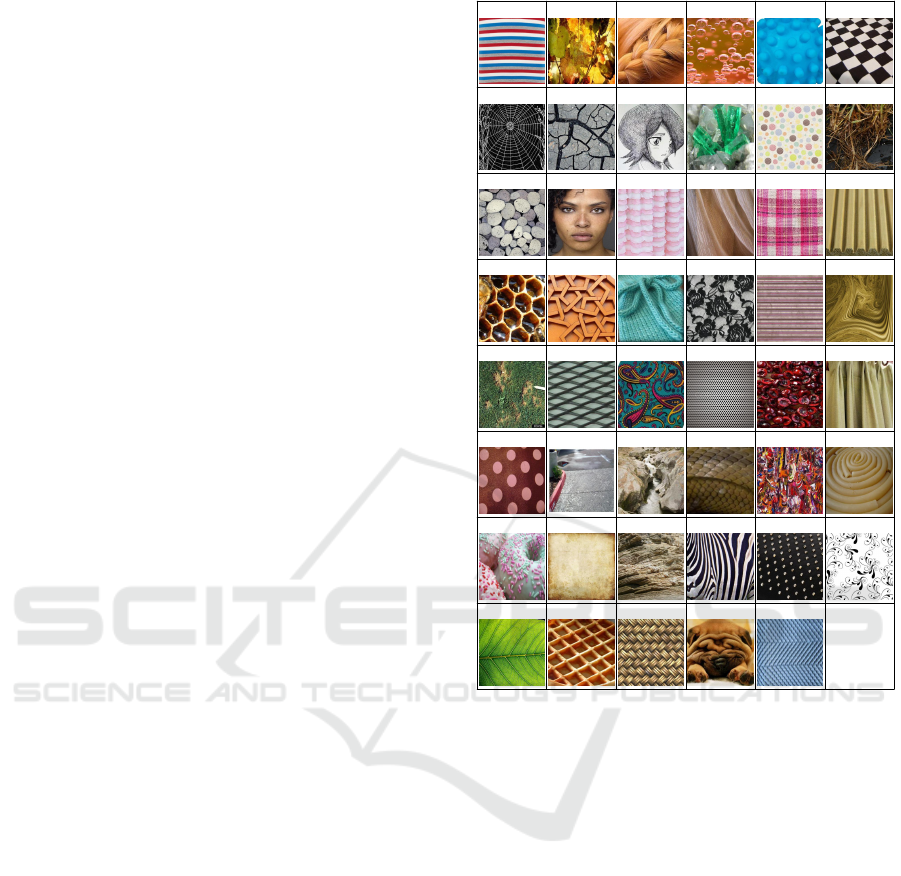
able Textures Dataset (DTD) (Cimpoi et al., 2014).
This dataset is created in the wild and it contains 5640
texture images that are annotated with adjectives se-
lected in a vocabulary of 47 English words. These
words are chosen from a larger set of 98 words that
people commonly use to describe textures, proposed
in (Bhushan et al., 1997). This work is mainly focused
on the cognitive aspects of texture perception, includ-
ing perceptual similarity and the identification of di-
rections of perceptual texture variability. The words
that describe surface shape, or do not give informa-
tion about visual aspects are removed from the set
(messy, corrugated etc.) and some words with sim-
ilar meanings are merged into one (coiled, spiralled
and corkscrewed). Examples of images from differ-
ent classes of DTD are shown in Fig 1.
3.3 Layout of the Experiment
To perform the psychophysical experiment, one im-
age from each of the 47 texture categories in DTD
dataset was randomly selected. We retrieved the 5
most similar images for each descriptor. Top 5 results
might contain images that are not from the same class
as the query. The test should not evaluate classes of
the retrieved images.
Images from the dataset are ranked using the Eu-
clidean distance between the query image and re-
trieved image representations. Only the first 5 images
are included in the test. In order to compare texture
descriptors based on feature maps of different con-
volutional layers, for each query image, we extracted
five retrieval responses independently.
Since there is no ground-truth that would enable
measuring how good retrieval result are, we created
a survey to get subjective responses using an online
platform. This way of testing is flexible because it al-
banded blotchy braided bubbly bumpy chequered
cobwebbed cracked crosshatched crystalline dotted fibrous
flecked freckled frilly gauzy grid grooved
honeycombed interlaced knitted lacelike lined marbled
matted meshed paisley perforated pitted pleated
polka-dotted porous potholed scaly smeared spiralled
sprinkled stained stratified striped studded swirly
veined waffled woven wrinkled zigzagged
Figure 1: Examples from Describable Texture Dataset.
lows people from different places and countries to do
the survey. Although the test is performed in uncal-
ibrated conditions, we fixed the necessary conditions
to assure validity of the results. The main conditions
are colour and size, as these are properties that can
change texture perception. Colour change has been
tested in different monitors without relevant changes
in the answers. Regarding size, which can change tex-
ture perception, all subjects are asked to perform the
experiment on desktop PC using at least 19” screen.
For each of 47 query images, we created a ques-
tion that offers five different retrieval responses (one
based on each convolutional layer) where every re-
sponse contains top 5 images. We asked participants
to compare these responses and to choose at least one
good and one bad result. For easy comparison, re-
sults of descriptors based on feature maps from dif-
ferent convolutional layers are presented one below
each other. In order to prevent the subjects from find-
ing patterns in results in different questions, rows with
responses were randomly shuffled for each query im-
age.
Evaluation of Deep Image Descriptors for Texture Retrieval
253
3.4 Specifications of the Survey
The initial instructions to the subjects prior to the test
were:
”Imagine that you are searching for an image on
internet, where the texture is what you are interested
in. In this survey we present some possible solutions,
while your task is to rate if our proposed solutions
are good or bad. There is not a specific task, just to
have some results that reminds the query as much as
possible.
The query image is present in the beginning of
each row and it is bordered by a red rectangle. Each
row presents one possible solution. Each solution
contains five ranked images, extracted by a particular
”system”. The closer an image is to the query image
(left one), the more similar the system considers it.
You can consider a good answer those rows that
you would be comfortable with when looking for the
query image. It’s up to you to decide which criteria is
more relevant in every single case.
Please, rate at least one retrieval result as good and
at least one as bad per each question. If you think that
a row is neither good or bad leave the corresponding
answer empty.
Thank you!”
This test was verified by four people with agree-
ment.
The survey was fulfilled by 10 people. Half of
them were naive subjects, never involved in an image
comparison task before. The other half were people
linked to the computer vision field, many of them in
research. None of the subjects was related to this spe-
cific work. 90% of people were between 24 and 35
years old, while the 10% were between 18 and 24.
50% of participants were female. They were people
of 7 different nationalities.
3.5 Examples from the Survey
In this section, two examples of questions from the
survey and the collected results are presented. As ex-
plained in section 3.3, each row of figures 2 and 3
represents a retrieval result based on features from a
different convolutional layer. In this case, rows are
not shuffled, so the first row is based on the first con-
volutional layer, second on the second and so on.
For every image, the answers from all subjects are
summarised in the number of times a given layer rep-
resentation was chosen as bad and how many times
as good. The results for Figure 2 and 3 are shown in
Table 1.
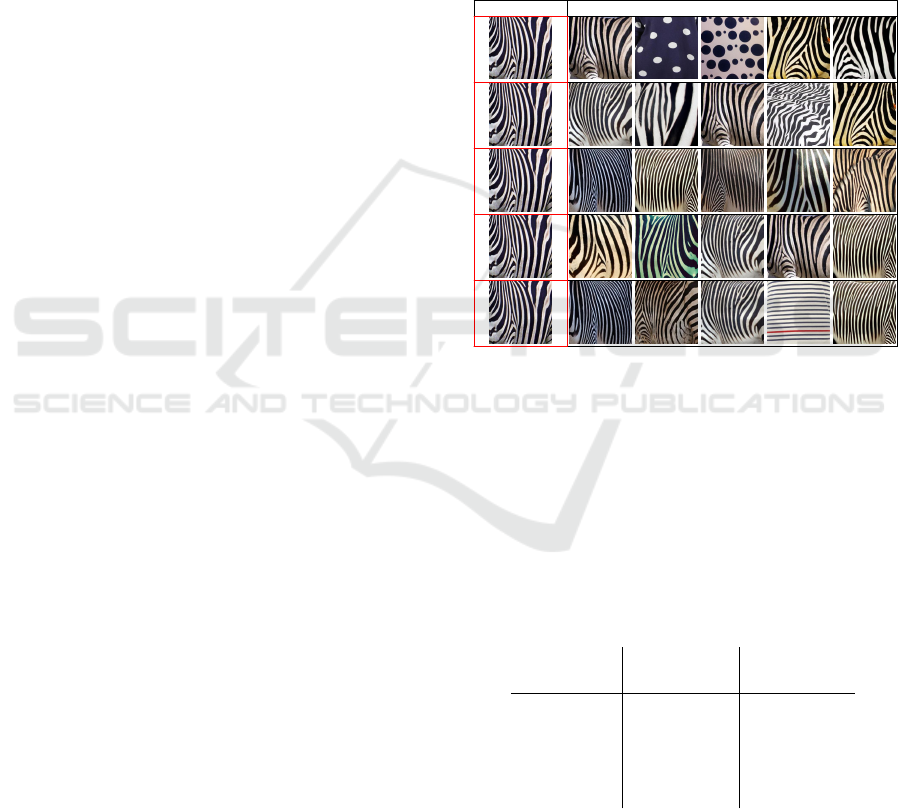
Figure 2 shows an example of texture retrieval
where the first convolutional layer was rated as bad
by almost all the observers. On the other hand, the
retrieval based on the second and third layers were
rated as good by all the observers. In this case, we
can conclude that the first layer is the worst, the sec-
ond and third are the best. Depending on the threshold
between the number of good and bad votes, represen-
tations from the layers four and five could be consid-
ered differently. As long as all the subjects who rated
the fourth layer gave it the good mark it is probable
that this representation is acceptable, while the fifth
layer provides descriptor that achieved more bad than
good votes, so it is classified as a bad descriptor.
query image retrieval
Figure 2: Example of a question from the survey with the
best 2
nd
and 3
rd
and the worst 1
st
layer representations.
Figure 3 shows a different behaviour of the tex-
ture descriptors. In this case, almost all the subjects
agreed that the result of the fourth and fifth convolu-
tional layers are bad. On the other hand, they agreed
that the third layer gives good result. Therefore, the
third layer can be regarded as the best.
Table 1: Results obtained on the two representative exam-
ples.
Fig 2 Fig 3
conv. layer
good bad good bad
1 1 9 7 2
2 10 0 6 3
3 10 0 8 1
4 8 0 0 9
5 3 4 1 8
The main difference between the results of these
two examples is the result obtained by the descriptors
based on the first convolutional layer. The reason for
this could be the fact that the first convolutional layer
contains low-level features which are good enough in
case of simple texture that does not have many details.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
254
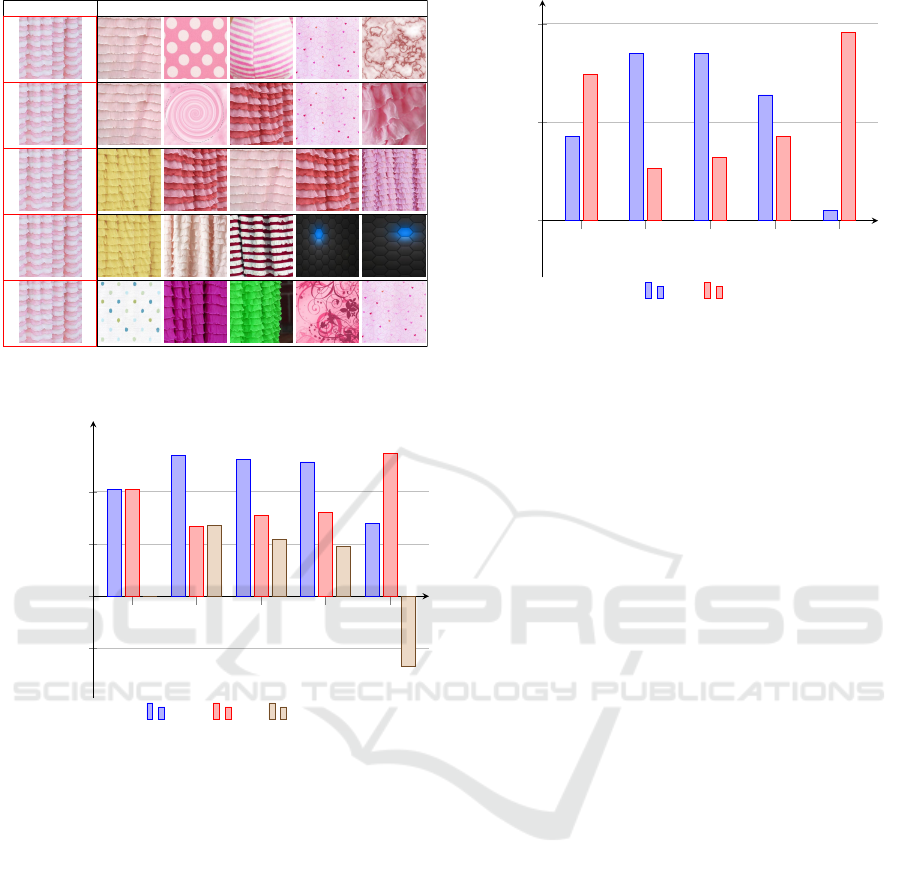
query image retrieval
Figure 3: Example of a question from the survey with the
best 3
rd
and bad 4
th
and 5
th
layer representations.
1 2 3 4
5
−100
0
100
200
convolutional layer
Number of answers
good bad difference
Figure 4: The results are presented for descriptors based
on different convolutional layers separately. Number of
”good” answers is sumed for all queries and all subjects
and it is presented by the blue bars. The same procedure
is done for ”bad” answers and the results are presented by
red bars. The differences between the number of positive
and negative votes - yellow bars.
In case of images with complex texture, this represen-
tation might be too simplistic.
4 RESULTS
This section summarises and discusses the results ob-
tained from the experiment. Results are aggregated in
two different ways, as shown in Fig. 4 and Fig. 5.
Figure 4 shows how many times the representation
of the image using each layer is selected as a good or
bad result. The yellow bars are the difference between
the number of good and bad votes. These results im-
ply that texture is described well by the intermediate
layers, while the last layer provides the worst results.
1 2 3 4
5
0
20
40
convolutional layer
Percentage of examples
best
worst
Figure 5: Chart with the results of the survey. For each
question from the survey we calculate the difference be-
tween the number of ”good” and ”bad” votes per each de-
scriptor. The biggest difference implies that that layer pro-
vides the best results, while the smallest difference says that
the result is the worst. In case that two layers have the same
difference between the positive and the negative votes, we
declare both of them as bests or worsts.
The first layer introduces confusion as the number
of good and bad votes is the same. The main reason
for the uncertain results could confirm our assumption
that texture is low-level property. Texture on some
images is very simple, without many details and in
these cases, representation based on the first convo-
lutional layer is rated as good (Figure 3). In contrast,
images of texture on certain objects apart from having
information about texture, contain shape. As shape
is known as a high-level property, this information is
present in deeper layers.
Fig. 5 shows additional information useful for
ranking of the descriptors. In this case, the graphic
shows how many times each descriptor appeared as
the best and the worst.
For each subject (i), query image ( j) and the num-
ber of the layer on which the descriptor is based (k)
the result of the survey can be good, bad or other. We
value good answer by +1, bad by -1, while neutral
answer is 0:
t(i, j, k) =
1 if vote is good
−1 if vote is bad
0 other
For each query image from the survey and for each
layer we sum the responses from all the subjects:
p( j, k) =
10
∑
i=1
t(i, j, k)
The layer with the highest p( j, k) score is rated as
the best, while the one with the lowest score is the
Evaluation of Deep Image Descriptors for Texture Retrieval
255

worst.
b( j) = arg max
k
(p( j, k))
w( j) = arg min
k
(p( j, k))
For each layer we counted number of questions in
which it appeared as the best and as the worst result.
B(k) =
47
∑
j=1
(1, if k = b( j))
G(k) =
47
∑
j=1
(1, if k = w( j))
Figure 5 shows the difference between the layers
and their ranking. According to the results that are
presented, it can be concluded that the descriptors
based on the fifth convolutional layer do not describe
texture well enough. On the other hand, second and
third layers are providing the best descriptors.
The feature maps from the fifth convolutional
layer contain information that is not relevant for tex-
ture description. This layer is deep and it provides
high-level properties, such as shape. Our experiment
confirms that shape is not a relevant parameter for tex-
ture description so the descriptors from this layer do
not contain essential information.
5 CONCLUSIONS AND
DISCUSSION
The increasing complexity learnt in the layers of a
ConvNet clearly helps the task of classification. The
ability to describe low-level features has been asso-
ciated to lower layers. Texture is a perceptual prop-
erty just partially related to semantics. It has been
associated to the V1, the primary visual cortex, which
responds to basic stimuli, in a similar way as lower
layers in a ConvNet do. Therefore, recent findings
suggesting that the last layer of the VGG network is
the best to describe textures seem counter-intuitive.
In this paper, we have presented a psychophysical ex-
periment to assert the suitability of different layers of
the VGG ConvNet for texture retrieval. We have used
the same dataset presented in (Cimpoi et al., 2014),
the Describable Textures Dataset, to run the retrieval
experiment. The reason underlying is to see whether
a good representation for classification is actually a
good representation for retrieval, where categories are
not present, a task more related to low-level percep-
tion.
Results obtained show a great agreement among
all the subjects in that the last layer is actually the
worst for the task at hand. This result agrees with
the common theory regarding textures, namely, that
these do not hold a strong semantical meaning. The
fifth layer encodes high-level information, therefore
being less adequate to describe textures. As shown
in Fig.2, this representation does not properly encode
basic texture properties such as scale or orientation.
Another interesting result is that the first layer, al-
though performing remarkably better than the fifth,
does not seem to be the best choice to represent
textures. Interestingly, results suggest that the fil-
ters learnt in such layer might actually be too basic
to perform good enough in the Describable Textures
Dataset. The conclusion from this experiment is that
intermediate layers, which encode more complex rep-
resentations after the nonlinearities learnt from basic
filters, are the best to describe textures. These results
show that textures do have a degree of higher-level in-
formation. Not a surprising finding given the nature
of the dataset. Actually, textures do go further than
just basic stimuli. Consider for instance the texture
’floral’, as can be found on textiles. This texture does
contain a degree of high level information and there-
fore higher layers should better encode such concepts.
Henceforth, a trade-off between low and high repre-
sentations is theoretically needed to represent basic
textures and some higher-level representations at the
same time.
The adequacy of the Describable Textures Dataset
as a sufficient representation to describe textures is an
important question not tackled in this paper. If tex-
tures are just partially related to semantics, to what
extent a dataset strictly derived from semantics can
effectively represent textures? This is not a criticism
of the dataset since it clearly states that it is related to
’describable’ textures. The problematic relates more
to the conclusion that a good texture representation is
one that can perform a good classification task in such
dataset, or, to this effect, to any dataset derived from
semantics.
Finally, an important conclusion of this paper is
that a good representation for classification does not
necessarily have to be a good representation for re-
trieval. This is due to the nature of representations
learnt by a discriminative model, where the main aim
is to draw the borders between classes in the feature
space. The relations between elements of the same
class are not tackled directly on discriminative learn-
ing. Such task relates much closely to representation
learnt by generative models, where the joint proba-
bility is modelled. Consequently, a good direction to
find a better representation for texture in the context
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
256

of Deep Learning might be to exploit unsupervised
approaches.
ACKNOWLEDGEMENTS
This work has been supported by Spanish MINECO
project TIN2014-61068-R.
REFERENCES
Babenko, A., Slesarev, A., Chigorin, A., and Lempitsky,
V. (2014). Neural codes for image retrieval. In Euro-
pean Conference on Computer Vision, pages 584–599.
Springer.
Bay, H., Tuytelaars, T., and Van Gool, L. (2006). Surf:
Speeded up robust features. In European conference
on computer vision, pages 404–417. Springer.
Bhushan, N., Rao, A. R., and Lohse, G. L. (1997). The
texture lexicon: Understanding the categorization of
visual texture terms and their relationship to texture
images. Cognitive Science, 21(2):219–246.
Caputo, B., Hayman, E., and Mallikarjuna, P. (2005). Class-
specific material categorisation. In Tenth IEEE Inter-
national Conference on Computer Vision (ICCV’05)
Volume 1, volume 2, pages 1597–1604. IEEE.
Cimpoi, M., Maji, S., Kokkinos, I., Mohamed, S., and
Vedaldi, A. (2014). Describing textures in the wild.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 3606–3613.
Cimpoi, M., Maji, S., Kokkinos, I., and Vedaldi, A. (2016).
Deep filter banks for texture recognition, description,
and segmentation. International Journal of Computer
Vision, 118(1):65–94.
Dana, K. J., Van Ginneken, B., Nayar, S. K., and Koen-
derink, J. J. (1999). Reflectance and texture of
real-world surfaces. ACM Transactions on Graphics
(TOG), 18(1):1–34.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical image
database. In Computer Vision and Pattern Recogni-
tion, 2009. CVPR 2009. IEEE Conference on, pages
248–255. IEEE.
Gan, Y., Cai, X., Liu, J., and Wang, S. (2015). A texture re-
trieval scheme based on perceptual features. In 2015
Asia-Pacific Signal and Information Processing As-
sociation Annual Summit and Conference (APSIPA),
pages 897–900. IEEE.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep resid-
ual learning for image recognition. arXiv preprint
arXiv:1512.03385.
Jordan, A. (2002). On discriminative vs. generative clas-
sifiers: A comparison of logistic regression and naive
bayes. Advances in neural information processing sys-
tems, 14:841.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Advances in neural information process-
ing systems, pages 1097–1105.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International journal of computer
vision, 60(2):91–110.
Mikolajczyk, K. and Schmid, C. (2005). A perfor-
mance evaluation of local descriptors. IEEE trans-
actions on pattern analysis and machine intelligence,
27(10):1615–1630.
Ojala, T., Pietikainen, M., and Maenpaa, T. (2002). Mul-
tiresolution gray-scale and rotation invariant texture
classification with local binary patterns. IEEE Trans-
actions on pattern analysis and machine intelligence,
24(7):971–987.
Perronnin, F. and Dance, C. (2007). Fisher kernels on visual
vocabularies for image categorization. In 2007 IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 1–8. IEEE.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., et al. (2015). Imagenet large scale visual
recognition challenge. International Journal of Com-
puter Vision, 115(3):211–252.
Rust, N. C., Schwartz, O., Movshon, J. A., and Simoncelli,
E. P. (2005). Spatiotemporal elements of macaque v1
receptive fields. Neuron, 46(6):945–956.
Sharan, L., Liu, C., Rosenholtz, R., and Adelson, E. H.
(2013). Recognizing materials using perceptually in-
spired features. International journal of computer vi-
sion, 103(3):348–371.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 1–9.
Wang, N. and Yeung, D.-Y. (2013). Learning a deep
compact image representation for visual tracking. In
Advances in neural information processing systems,
pages 809–817.
Wu, P., Manjunath, B., Newsam, S., and Shin, H. (2000).
A texture descriptor for browsing and similarity re-
trieval. Signal Processing: Image Communication,
16(1):33–43.
Zeiler, M. D. and Fergus, R. (2014). Visualizing and under-
standing convolutional networks. In European Con-
ference on Computer Vision, pages 818–833. Springer.
Zheng, S., Jayasumana, S., Romera-Paredes, B., Vineet, V.,
Su, Z., Du, D., Huang, C., and Torr, P. H. (2015). Con-
ditional random fields as recurrent neural networks. In
Proceedings of the IEEE International Conference on
Computer Vision, pages 1529–1537.
Evaluation of Deep Image Descriptors for Texture Retrieval
257
