
A Surveillance Application of Satellite AIS
Utilizing a Parametric Model for Probability of Detection
Cheryl Eisler
1
, Peter Dobias
1
and Kenzie MacNeil
2
1
Defence Research and Development Canada – Centre for Operational Research and Analysis,
101 Colonel By Drive, Ottawa, ON, Canada
2
CAE Inc., 1135 Innovation Drive, Ottawa, ON, Canada
Keywords: Satellite Automatic Identification System (S-AIS), Surveillance, Probability of Detection, Parametric,
Performance, Model, Signal Collision.
Abstract: The question of having sufficient surveillance capability to detect illicit behaviour in order to inform
decision makers in a timely fashion is of the ultimate importance to defence, security, law enforcement, and
regulatory agencies. Quantifying such capability provides a means of informing asset allocation, as well as
establishing the link to risk of mission failure. Individual sensor models can be built and integrated into a
larger model that layers sensor performance using a set of metrics that can take into account area coverage,
coverage times, revisit rates, detection probabilities, and error rates. This paper describes an implementation
of a parametric model for Satellite Automated Identification System (S-AIS) sensor performance. Utilizing
data from a real data feed, the model was able to determine the percentage of uncorrupted S-AIS messages
and the probability of detection of at least one correct S-AIS message received during an observation
interval. It is important to note that the model implementation was not actively calculating the effect of
message overlap based on satellite altitude and footprint width, or reductions in collisions due to signal de-
collision algorithms.
1 INTRODUCTION
The awareness and associated tracking of maritime
vessels approaching and within a country’s
territorial waters (TTW) and its exclusive economic
zone (EEZ) are necessities for the enforcement of
environmental and commercial laws and regulations,
as well as national security and the protection of
public safety. This makes maritime domain
awareness (MDA) a national priority. There are two
aspects to MDA: the quality and quantity of data to
collect and fuse, and the reporting/prediction metrics
that are used to gather the information into a
quantifiable, comparable fashion for decision
support. The former is well recognized as an issue
for data analytics, data fusion, and big data research
topics. The latter falls under the more traditional
operational research umbrella, and will be discussed
in this paper. The data analytics problem is beyond
the scope of this discussion; for a more detailed
treatment of data collection requirements for MDA,
see Horn et al. (2016) and references therein.
Metrics that can be used for historical reporting
and forecasting of upcoming activities are of
particular interest at the operational level because
they provide critical information to military decision
makers about the use of surveillance capabilities,
such as:
Will the surveillance capabilities provide
sufficient means to detect illicit behaviour?
What is the likelihood that illicit behaviour
would go undetected?
Will the surveillance capabilities provide
sufficient temporal and spatial coverage of the
area of responsibility (AOR) to be able to
inform decisions in a timely fashion?
The answers to these questions are of the
ultimate importance to defence, security, law
enforcement, and regulatory agencies, as they
provide means of informing asset allocation, as well
as establishing a link to the risk of mission failure
for given capability sets.
The purpose of this research is to select one
surveillance sensor – in this case, the Automatic
Identification System (AIS) – to model the
performance of, and use it as a test case towards
Eisler, C., Dobias, P. and MacNeil, K.
A Surveillance Application of Satellite AIS.
DOI: 10.5220/0006108302110218
In Proceedings of the 6th International Conference on Operations Research and Enterprise Systems (ICORES 2017), pages 211-218
ISBN: 978-989-758-218-9; ISSN: 2184-4372
Copyright
c
2023 by His Majesty the King in Right of Canada as represented by the Minister of National Defence and SCITEPRESS – Science and Technology Publications, Lda. Under
CC license (CC BY-NC-ND 4.0)
211

building a more complex, layered model of
surveillance capabilities. This will enable reporting
and planning for the given capability sets.
This paper is organized as follows. Section 2
provides a brief description of how AIS functions,
the utility of the selected sensor, and the inherent
complications when trying to model such a sensor.
Section 3 describes the simplified performance
model chosen and the associated advantages of using
such a sub-model within a larger model. Section 4
illustrates how the sensor and performance model
were implemented, and provides a test case using
real world data from an AIS feed to compute
performance parameters. Section 5 discusses some
of the limitations of the current model and
implementation, and presents proposals for future
work. Section 6 concludes the paper.
2 THE AUTOMATIC
IDENTIFICATION SYSTEM
One sensor that is now commonly exploited for
MDA is AIS, which is a self-reporting system that
was designed for enhancing the safety of navigation
at sea. AIS transponders are mandated by the
International Convention for the Safety of Life at
Sea (SOLAS) Convention, 1974 (International
Maritime Organization, 2015) for all ships over 300
gross tonnage, all passenger-carrying vessels, and
can be used by other vessels on a voluntary basis.
Vessel-mounted AIS transponders are broken
into two types. Class A transponders are required on
the mandated vessels described previously. Class B
transponders are a lower power, less expensive
technology which transmit less frequently than their
Class A counterparts, and are often used on smaller
vessels. It can be estimated that AIS is utilized on
anywhere from approximately 400,000 to over
550,000 ships, navigational aids, base stations, and
other sources (including active and decommissioned
vessels), depending on the data provider
(myShipTracking, 2016; MarineTraffic.com, 2016).
While the fraction of active Class A versus Class B
sources are not directly reported, this does provide a
sense of the volume of information received by
tracking networks when ships are reporting
anywhere from 2 seconds to 6 minutes apart
(International Telecommunications Union, 2014).
2.1 Sensor Utility
Terrestrial-based tracking networks provide a means
of continuously monitoring so equipped ship traffic
within the detection range of the shore-based
stations. However, AIS signals were found to be
detectable from satellite-based receivers as well.
Some of the main limitations with satellite AIS (S-
AIS) are the amount of sensor coverage and the
revisit rates of the satellite, which can be mitigated
in part by monitoring from multiple satellites. So,
while coastal AIS systems are advantageous for
monitoring of the TTW and a fraction of the EEZ –
with distances depending on very high frequency
(VHF) ducting properties (Tunaley, 2011a), S-AIS
has moved to the forefront of technologies for wide-
area surveillance at high refresh rates for reach over
almost any AOR.
S-AIS is usually employed in conjunction with
other sensors, such as coastal radar (Canadian Coast
Guard, 2016), high-frequency surface wave radar
(Vesecky et al., 2009), satellite-based synthetic
aperture radar (Guerriero et al., 2008), or visual
identification (or other onboard sensors) using
maritime or aerial assets (Busler et al., 2015). This
helps to mitigate some of the known issues with data
quality (such as signal errors, technical installation
or input errors, or spoofing (Bošnjak et al., 2012)).
2.2 Modelling Complications
Technically, however, S-AIS also suffers from
further complications due to the simultaneous
reception of a high number of messages within the
large reception footprint in conjunction with the AIS
communication standard (International
Telecommunications Union, 2014). The design of
the AIS message system into discrete, fixed width
slots limits the reception of messages at the receiver,
and the sheer volume of the AIS message traffic
produces a high probability of message collision
(i.e., message arrivals within the same time slot).
On-board processing (OBP) of messages cannot
fully resolve such collisions, and as a result, the first
pass detection is low (exactEarth, 2012) when ship
traffic is dense. While much can be done in terms of
antenna design and signal processing (Yang et al.,
2014; Yang et al., 2012; Picard et al., 2012) to
reduce these effects, there still exists a significant
impact on the sensor’s overall detection
performance.
Some providers have chosen to downlink all
messages to ground stations for more efficient
spectrum de-collision processing (SDP) (Macikunas
and Randhawa, 2012). Algorithms have been
proposed and/or implemented (e.g., Cowles et al.,
2014; Cherrack et al., 2014) to increase the detection
ICORES 2017 - 6th International Conference on Operations Research and Enterprise Systems
212

performance; however, the time latency of the data
is dramatically increased (Meger, 2013).
3 SIMPLIFIED S-AIS MODEL
For the purposes of historical reporting and
forecasting of upcoming activities at the operational
level for defence primarily (but also including
security, law enforcement, and regulatory agencies),
the following considerations and assumptions are
made:
Any model must run in a practical amount of
time so as to be able to provide timely and
meaningful decision support (typically viewed
as 1-2 days for short turn-around analyses).
Thus, simpler is better;
When representing the capabilities of a system
that link to the risk of mission failure, often
the “worst case scenario” is chosen to
represent the ultimate limit of the system’s
capabilities. So, for example, if ground
stations were unable to perform SDP for some
reason, then OBP would be considered the
minimum capability provided. It also provides
a consistent model and assumption set across
all S-AIS providers, since some perform SDP
and some perform OBP;
From a reporting/forecasting standpoint, the
timeslots of individual messages are unknown
(data not provided), and so the de-collision
process cannot be reproduced and modelled
directly. While the signal de-collision process
can be simulated, it is easier to implement a
direct relationship between the number of
ships and the probability of detection; and
Since not all AIS providers utilize SDP, it is
assumed that a generic model that can be
applied across any provider would provide
more utility. It could later potentially be
scaled to account for SDP.
3.1 Single Sensor Model
In order to be able to quantify the ability of a
collection of disparate sensors, each with their own
area coverages, coverage times, revisit rates,
detection probabilities, and error rates (false
positives, false negatives, bit rate errors, etc.), a set
of metrics that can take all of these factors into
account is required. Individual sensor models can be
built and integrated into a larger model that layers
sensor performance over an AOR for a
comprehensive capability to report on historical
coverages and test out future surveillance plans.
High fidelity tools, such as the Systems Tool Kit
(STK), can be used to build such a model. The
satellite selected for the application here was
exactView-1, one of the exactEarth constellation
of satellites.
Modelling of the coverage of active or non-
cooperative passive sensors (i.e., independent of the
cooperation of a vessel) in a software package such
as STK is generally straightforward; however,
modelling of cooperative sensors such as AIS can
be more challenging. While all vessels must be
represented as objects in a modelled scenario in
STK, this does not mean that they can or should be
detected by sensors at all times. Different vessels
transmit AIS messages at different times and at
different rates; therefore, the sensor cannot
automatically assume it can “see” the vessel all of
the time.
3.2 Sensor Detection Performance
Høye (2004) quantified the parametric relationship
between the number of ships in the S-AIS sensor’s
field of view (FOV) and the probability of detecting
a single ship; however, it was assumed that message
collisions could not be de-conflicted. Tunaley
(2011b) later showed that the probability of
extracting an uncorrupted message, γ, from the
simultaneous arrival of another singleton message
can be derived in the presence of thermal noise,
interference from neighbouring channels or even
interference in the same channel from terrestrial
transmitters (Eq. 1).
(1)
The explanations for, and the values of the
parameters in Eq. (1) from (Tunaley, 2011b) for a
satellite at 800 km altitude are provided in Table 1.
Høye (2004) reports the difference in the values
between 600 km and 800 km altitude as 0.0382,
while the difference in the value between 800 km
and 1,000 km altitude as 0.0248. Therefore, the
average difference between each 1 km of altitude is
~0.0002. This means the 5 km to 40 km offset in the
STK exactView-1 satellite object’s altitude has a
negligible effect on the 0.6744 value of for a
satellite with 800 km altitude. As a result, a fixed
value was used for the initial model (MacNeil,
2015).
A Surveillance Application of Satellite AIS
213

Table 1: Equation parameter definitions.
Parameter Name Value
Probability of receiving an
uncorrupted message at
the input system regardless
of collisions
0.2683
Mean rate of random
messages arriving
Eq. (2)
Length of slot (s) 0.0267
Probability that an
additional signal does not
corrupt the message
0.904
Effect of range overlap 0.674
M
Number of ships inside the
ships cell
Assumed
negligible
n
ch
Number of VHF channels 2
Δ
Mean time between
message transmissions (s)
Calculated
The mean rate of message arrival (λ) as a
function of number of ships (N) in the FOV is given
in Eq. (2), with parameter values also provided in
Table 1.
Δ
(2)
Substituting λ from Eq. (2) and all parameter
values from Table 1 in Eq. (1) yields Eq. (3).
Δ
0.2683
.
Δ
(3)
The probability that at least one correct AIS
message will be observed during a given interval
(T
obs
) (Tunaley, 2011b) is provided in Eq. (4) after
substituting in Eq. (2).
11
∆
∆
⁄
(4)
3.3 Model Implementation
The parametric model was implemented using STK
to perform its satellite modelling and line-of-sight
(LOS) calculations (MacNeil, 2015). The MATLAB
scripting language was also selected for use, as it
integrates directly with STK and automates the
execution of STK commands. The model
implementation was driven by a series of MATLAB
scripts to perform LOS analysis in STK between a
satellite sensor, representing exactView-1 AIS, and
three predefined AORs (shown in white in Figure 1).
These line-of-sight analyses are referred to in STK
as access calculations.
Figure 1: Three Canadian AORs (white outlines) and the
exactView-1 AIS sensor FOV (cyan overlay) over time
when access is available to each AOR.
The parametric model was designed to take
geographically-tagged JavaScript Object Notation
(GeoJSON) S-AIS messages from the exactEarth
satellite feed and calculate the probability of
extracting an uncorrupted message when the
exactView-1 AIS sensor FOV has access to an AOR.
One day’s worth of S-AIS position reports
(approximately 4.5 million messages) were filtered
for Class A messages only. To reduce the problem
set, the target areas were selected by the union of all
areas covered by the exactView-1 AIS sensor
footprint when the sensor had access, or LOS, to
each of the AORs separately during the defined
scenario period. This left approximately 2.2 million
position reports to process. The execution of the
model was then broken down into three sequential
operations (MacNeil, 2015):
1. Partitioning and reformatting S-AIS position
reports into separate ship files based on unique
Maritime Mobile Service Identity (MMSI) numbers;
2. Creating the relative STK ephemeris and
interval constraint files for each ship; and
3. Analyzing the STK satellite-to-ship access
data for each AOR, and collating the data to
determine the probability of extracting an
uncorrupted message for each observation period.
Additional algorithm implementation details are
provided in the paper’s appendix.
4 RESULTS
The partitioning and reformatting of the S-AIS
position reports took 14.3 hours to complete on a
3.20 GHz Intel
®
Core i5-4570 with 8 GB (3.18 GB
usable) RAM and an Intel
®
HD Graphics 4600
processor graphics card. The script produced over
61,000 partitioned S-AIS ship data files. The script
ICORES 2017 - 6th International Conference on Operations Research and Enterprise Systems
214
excluded, or dropped, message rows that were not
Class A position report messages.
The execution of the script to create the STK
ephemeris and interval constraint files for each ship
took 7.5 hours to complete. The script produced over
43,000 files of each type. The script excluded, or
dropped, partitioned ship files that existed outside of
all three AOAs.
The creation of the STK scenario and analysis of
the satellite-to-ship access took 7.7 hours to
complete. Each sensor FOV included approximately
29-39,000 individual ship objects. During the
scenario, there were 11-14 access intervals for the
AORs. Each access interval was treated as a separate
observation period for the purposes of the following
results.
For the scenario considered, the execution time
was relatively reasonable. However, it may prove
challenging to remain within practical time limits
when integrating further sensors into the mix,
depending on the amount of computations that can
be leveraged between sensors. One way to speed up
the computations would be to take advantage of
MATLAB and STK’s parallel processing features;
however, both require specialized licensing.
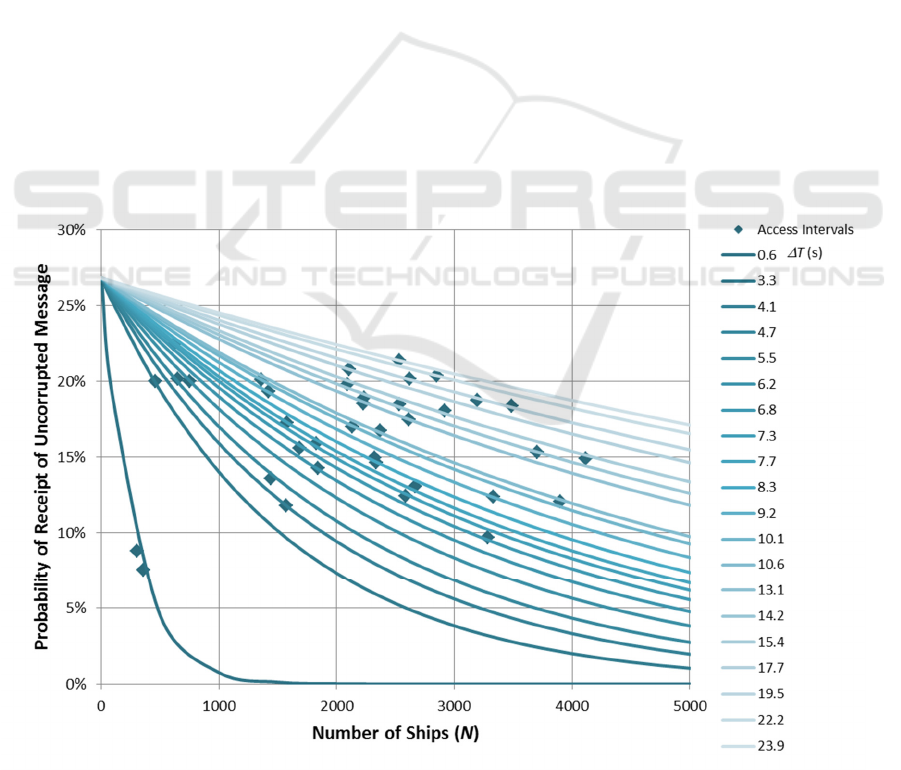
4.1 Uncorrupted Messages
For each access interval, the probability of receipt of
an uncorrupted message was calculated using Eq.
(3). Given that the duration of each access interval
varies, as does the number of messages received, the
mean time (
T) between messages could not be
considered to be constant.
T was calculated using
the total access duration divided by the number of
messages received for the given interval, Figure 2
results, where the data points for the access intervals
are shown individually (diamonds) on plots of the
function from Eq. (3). The function plots match the
access interval
T values, while varying the number
of ships in the FOV. As the number of ships in the
FOV increases or the time between messages
decreases the probability of receipt of an
uncorrupted message decreases. Thus, as more ships
that exist within the FOV and transmit messages
more often, the more likely the signal collisions are
to cause corruption in the messages.
Previous implementations (such as Tunaley, 2011b;
Parsons et al., 2013) assume that the mean time
between messages and the observation time are
fixed. Here, a single pass of the satellite is utilized
over a variable observation time frame, as
determined by the sensor’s access time to each
Figure 2: The fraction of messages that are uncorrupted as a function of number of ships in the sensor FOV and the mean
time between messages.
A Surveillance Application of Satellite AIS
215

AOR. This time frame is significantly longer than
the average time a ship is visible within the sensor
footprint. The mean time between messages is then
calculated based on the received data within that
time frame. This cross validates the equation
parameters from Table 1, as well as the basic model
for on-board processing system performance.
4.2 Probability of Detection
From Eq. (4),
∆
⁄
is essentially the count of the
number of detections in the FOV over the duration
of the access interval. Because the FOV is large and
the access duration is long, the number of detections
observed is in the thousands or tens of thousands. As
a result, this term tends to zero, resulting in a near
100% probability of detection of at least one
uncorrupted AIS message from any given ship in the
FOV.
While edge effects from the shape of the
footprint (which is a circular beam projected at an
angle over a spherical surface) will reduce the
amount of time some ships will remain observed, the
observed time would have to be reduced by more
than 92% to see any less than 99% probability of
detection of at least one correct AIS message.
5 DISCUSSION
Since the purpose of this work was to create a
simple preliminary model that could be used as the
basis for further integrated model development,
there were some noted issues that are planned to be
addressed in future work.
5.1 Message Quantity and Quality
The GeoJSON data is contained in a large text file
that is organized according to a contact identification
column and not by date/time stamp, which makes it
difficult to perform read search and sort operations
in MATLAB. Initial file parsing would likely be
better suited to database operations either through a
performed with Structured Query Language (SQL)
commands through either a Python or C++/C#
application (MacNeil, 2015). An application written
in Python would be easier to update and modify
since it is a dynamically typed scripting language,
and could be integrated with technologies such as
ArcGIS for geo-filtering of data points. Programs
written in C++/C# are compiled to native machine
code, and can be very computationally quick. An
application written in C# would also easily integrate
with the STK Integration plugin.
Naturally, since the topic deals with corrupted
AIS messages, the quality of the data from the AIS
feed can be an issue to parse. From the data, it was
noted that there were objects that travel semi-
erratically across the globe, ship MMSIs which
consistently reported the same, or very similar,
invalid positions, and objects which contain a single
invalid, potentially corrupt message. The first step in
helping to resolve some of these issues would be to
filter the AIS messages based on Tunaley (2013).
This would restrict the MMSIs to valid ship codes of
interest. By extending the model to more satellites
and to global coverage, location-specific issues
should also be resolved.
It is also important to note that the precision of
the GeoJSON formatted S-AIS data’s report and
received date/time is to the second. The time length
of a single AIS transmission time slot is 0.0267
seconds. Thus, a small amount of error is introduced
when parsing the data.
5.2 Model Refinement
At the moment, the values for the parameters in the
governing equations are primarily taken from
Tunaley (2011b). The next level of refinement to the
model would be to determine the current values for s
and q based on the scenario satellite data instead of
using a constant value. While a brief analysis of the
value revealed that the difference between a fixed
and dynamic value is small; it represents an increase
in fidelity of the model and supports extensibility to
other satellites. This would require implementing
Høye’s (2004) model to determine the value based
on STK’s exactView-1 satellite object’s altitude and
the partition of the satellite’s sensor detection area.
As mentioned in Section 4.1, the model and
scripts should be modified to support the entire
exactEarth™ satellite constellation. This would
enable the computation of the performance of the
sensor system as a whole.
As well, the model and scripts could also support
global coverage analysis. This would require the
removal of the dependency on the AOR access times
from the current model and the addition of another
time analysis metric (MacNeil, 2015).
5.3 Model Integration
It is intended that, once the entire satellite
constellation is modelled, this becomes a sub-model
in a larger, layered approach to surveillance
ICORES 2017 - 6th International Conference on Operations Research and Enterprise Systems
216

capability planning and reporting. Thus, rather than
trying to compare apples to oranges with
active/passive versus co-operative sensors, the
overall performance of the S-AIS sensor system can
be utilized in a simplified fashion to compute the
probability of detecting ships. Other sensors and
platforms can be integrated over various time frames
to determine what combination of capabilities
provides sufficient temporal and spatial coverage of
the AOR to meet the decision-makers’ requirements.
6 CONCLUSIONS
A parametric model (Tunaley, 2011b) for S-AIS
senor performance was successfully implemented in
STK. Utilizing data from the real S-AIS feed, the
model was able to determine the percentage of
uncorrupted AIS messages and the probability of
detection of at least one correct AIS message
received during an observation interval for a one-day
scenario period. This model provided a reasonable
start towards building a more complex, layered
model of surveillance capabilities for reporting and
forecasting for defence security, law enforcement,
and regulatory applications.
The implementation utilized real-world data to
cross-validate the model assumptions and
application over a wide variety of inputs. It is
important to note that the model implementation was
not actively calculating the effect of message
overlap based on S-AIS sensor altitude and footprint
width for the different satellite altitudes during its
orbit. Although an analysis of the effect of message
overlap revealed that the difference between the
static and calculated values would be minor; further
model refinements should still take such details into
account. The model and scripts serve as a foundation
for future improvements and extensions in both the
scope of the model and the performance of the
implementation.
COPYRIGHT
The authors of this paper (hereinafter “the Work”)
carried out research on behalf of Her Majesty the
Queen in right of Canada. Despite any statements to
the contrary in the conference proceedings, the
copyright for the Work belongs to the Crown.
ICORES 2017 was granted a non-exclusive license
to translate and reproduce this Work. Further
reproduction without written consent is not
permitted.
REFERENCES
Bošnjak, R., Šimunovića, L., and Kavran, Z., 2012.
Automatic Identification System in Maritime Traffic
and Error Analysis, Transactions on Maritime
Science, 02, 77-84.
Busler, J., Wehn, H., and Woodhouse, L., 2015. Tracking
Vessels to Illegal Pollutant Discharges Using
Multisource Vessel Information, In 36th International
Symposium on Remote Sensing of Environment, The
International Archives of the Photogrammetry,
Remote Sensing and Spatial Information Sciences,
XL-7/W3, 927-932.
Canadian Coast Guard, 2016. Marine Communications
and Traffic Services MCTS, Government of Canada.
Retrieved from: http://www.ccg-gcc.gc.ca/Marine-
Communications/Home (Access Date; 13 September
2016).
Cherrak, O., Ghenniou, H., Thirion-Moreau, N., and
Abarkan, E., 2014. Successive Interference
Cancellation technique for decollision of AIS signals
in maritime surveillance context by a LEO satellite, In
La première édition du Workshop International sur les
nouvelles Technologies sans fil et Systèmes répartis,
WITS.
Cowles, P.R., D'Souza, I.A., and Peach, R.C., 2014.
Satellite detection of automatic identification system
signals, Patent CA 2691120 C, viewed 10 Dec 2016,
http://www.google.com/patents/CA2691120C?cl=en.
exactEarth, 2012. Satellite AIS and First Pass Detection:
An exactEarth White Paper, viewed 10 Dec 2016,
http://cdn2.hubspot.net/hub/183611/file-30951507-
pdf/Collateral_for_Download/First_Pass_Detection_
White_Paper.pdf.
Guerriero, M., Willett, P., Coraluppi, S., and Carthel, C.,
2008. Radar/AIS Data Fusion and SAR tasking for
Maritime Surveillance, In 11th International
Conference on Information Fusion, IEEE, 1650-1654.
Horn, S., Collins, Lt(N) J., Eisler, C., and Dobias, P.,
2016. Data requirements for anomaly detection, In
2016 Workshop on Maritime Knowledge Discovery
and Anomaly Detection.
Høye, G., 2004. Observation Modelling and Detection
Probability for Space-Based AIS Reception –
Extended Observation Area, FFI Report,
FFI/RAPPORT-2004/04390.
International Telecommunications Union, 2014.
Technical characteristics for an automatic
identification system using time division multiple
access in the VHF maritime mobile band
(Recommendation ITU-R M.1371-4), viewed 8 Dec
2016, https://www.itu.int/dms_pubrec/itu-r/rec/m/R-
REC-M.1371-5-201402-I!!PDF-E.pdf.
Macikunas, A. and Randhawa, B., 2012. Space-based
Automated Identification System (AIS) Detection
Performance and Application to World-wide Maritime
A Surveillance Application of Satellite AIS
217
Safety", In 30th AIAA International Communications
Satellite Systems Conference, ICSSC.
MacNeil, K., 2015. DRDC CORA Task #194: Coastal
Surveillance Model Development, Defence Research
and Development Canada – Centre for Operational
Research and Analysis, DRDC-RDDC-2015-C283.
MarineTraffic.com, 2016. Ships List – Vessel Search | AIS
Marine Traffic, viewed 10 Dec 2016,
http://www.marinetraffic.com/en/ais/index/ships/all/st
atus:all.
Meger, E., 2013. Limitations of Satellite AIS: Time
Machine Wanted!, viewed 10 Dec 2016,
http://d284f45nftegze.cloudfront.net/emeger/White%2
0Paper%20-
%20Limitations%20of%20Satellite%20AIS%20-
%20Time%20Machine%20Wanted.pdf.
myShipTracking, 2016. My Ship Tracking Free Realtime
AIS Vessel Tracking Finder Map, viewed 10 Dec
2016, http://www.myshiptracking.com/search/vessels.
Parsons, G., Youden, J., Yue, B., and Fowler, C, 2013.
Satellite Automatic Identification System (SAIS)
Performance Modelling and Simulation: Final
Findings Report, Defence Research and Development
Canada – Ottawa, DRDC Ottawa CR 2013-096.
Picard, M., Ourlarbi, M.R., Flandin, G., and Houcke, S.,
2012. An Adaptive Multi-User Multi-Antenna
Receiver for Satellite-Based AIS Detection, 6th
Advanced Satellite Multimedia Systems Conference
and 12th Signal Processing for Space Communications
Workshop, IEEE, 273-280.
International Maritime Organization, 2015. SOLAS 1974,
Chapter V, Regulation 19. Retrieved from
http://www.imo.org/en/About/Conventions/ListOfCon
ventions/Pages/International-Convention-for-the-
Safety-of-Life-at-Sea-(SOLAS),-1974.aspx (Access
Date: 13 September 2016).
Tunaley, J.K.E., 2011a. Space-Based AIS Performance,
London Research and Development Corporation
Technical Report, LRDC 2011-05-23-001.
Tunaley, J.K.E., 2011b. The Performance of Space-Based
AIS System, London Research and Development
Corporation Technical Report, LRDC 2011-06-20-
001.
Tunaley, J.K.E, 2013. Utility of Various AIS Messages for
Maritime Awareness, London Research and
Development Corporation Technical Report, LRDC
2013-10-001.
Vesecky J.F., Laws, K., and Paduan, J.D., 2009. Using HF
surface wave radar and the ship Automatic
Identification System (AIS) to monitor coastal vessels,
In Geoscience and Remote Sensing Symposium, IEEE,
Volume 3.
Yang, J, Cheng, Y., and Chen, L., 2014. The Detection
Probability Modeling and Application Study of
Satellite-Based AIS System, In 7th Joint International
Information Technology and Artificial Intelligence
Conference, IEEE.
Yang, M., Zou, Y, and Fang, L., 2012. Collision and
Detection Performance with Three Overlap Signal
Collisions in Spaced-Based AIS Reception, In 11
th
International Conference on Trust, Security and
Privacy in Computing and Communications, IEEE,
1641-1648.
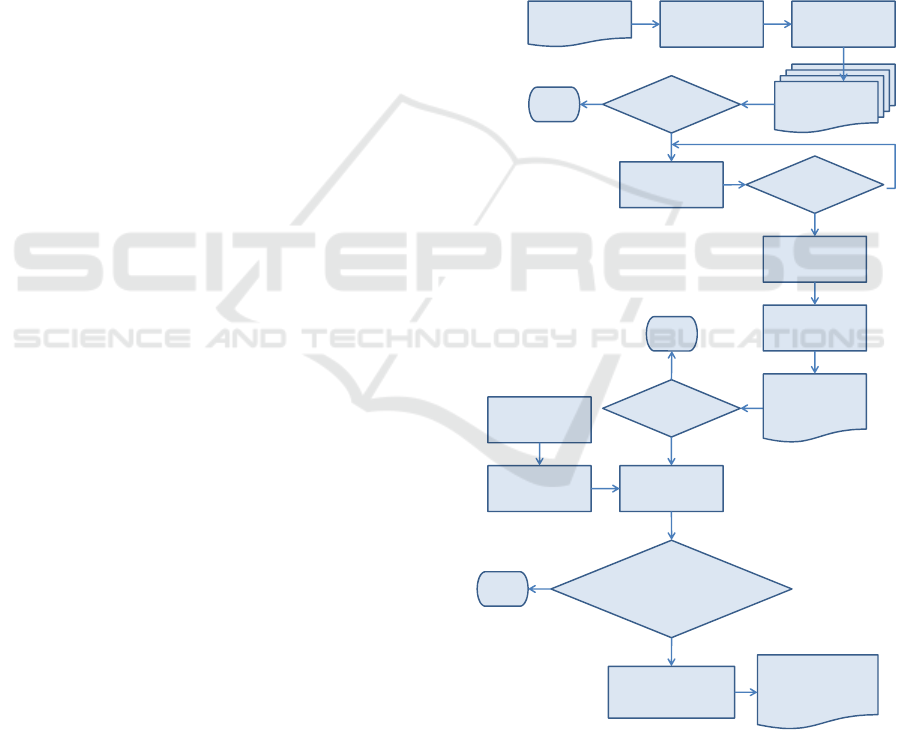
APPENDIX
The parametric model is written in MATLAB as a
series of steps (Figure 3) that process the selected
user input data, perform all necessary conversions,
and control the execution of STK to compute the
LOS calculations necessary to support computation
of the probability of reception of an uncorrupted
message given the number of ships in the sensor’s
FOV over a given period of time.
Figure 3: Parametric model implementation in MATLAB.
SelectGeoJSON
AISFile
ParseTextFile
FilterPosition
ReportsbyClass
Type
SelectedS‐AISText
File
SelectedS‐AISText
File
SelectedS‐AISText
File
PositionReport
(ClassA)by
UniqueMMSI
Files
created
successfully
No
Exit
Yes
ForEachFile,Read
inRawShipData
ShipinAOR
No
Yes
PerformTimeand
Coordinate
Conversions
SortMessages
Accor ding to
ReportTime
CreateSTK
Ephemerisand
TemporalInterval
ConstraintFiles
Files
created
successfully
No
Exit
Yes
CreateSTK
scenario
CalculateAccess
BetweenSensor
andAOR
ForEachFile,
GenerateShipin
Scenario
Ship‐SatelliteAccess
IntervalOccursDuring
anAOR‐Satellite
AccessInterval
No
Exit
Yes
ApplyParametric
ModeltoCalculate#of
T ransmissionsin
Satellite‐AORAccess
Probabilityof
ReceivingAn
UncorruptedMessage
DuringScenarioPeriod
ICORES 2017 - 6th International Conference on Operations Research and Enterprise Systems
218
