3D Reconstruction of Indoor Scenes using a Single RGB-D Image
Panagiotis-Alexandros Bokaris
1
, Damien Muselet
2
and Alain Trémeau
2
1
LIMSI-CNRS, University of Paris-Saclay, Univ. Paris-Sud, 91405 Orsay Cedex, France
2
Laboratoire Hubert Curien, CNRS, UMR 5516, Université Jean Monnet, 42000 Saint-Étienne, France
Keywords:
3D Reconstruction, Cuboid Fitting, Kinect, RGB-D, RANSAC, Bounding Box, Point Cloud, Manhattan
World.
Abstract:
The three-dimensional reconstruction of a scene is essential for the interpretation of an environment. In this
paper, a novel and robust method for the 3D reconstruction of an indoor scene using a single RGB-D image
is proposed. First, the layout of the scene is identified and then, a new approach for isolating the objects in
the scene is presented. Its fundamental idea is the segmentation of the whole image in planar surfaces and the
merging of the ones that belong to the same object. Finally, a cuboid is fitted to each segmented object by a
new RANSAC-based technique. The method is applied to various scenes and is able to provide a meaningful
interpretation of these scenes even in cases with strong clutter and occlusion. In addition, a new ground truth
dataset, on which the proposed method is further tested, was created. The results imply that the present work
outperforms recent state-of-the-art approaches not only in accuracy but also in robustness and time complexity.
1 INTRODUCTION
3D reconstruction is an important task in computer
vision since it provides a complete representation of
a scene and can be useful in numerous applications
(light estimation for white balance, augment synthetic
objects in a real scene, design interiors, etc). Nowa-
days, with an easy and cheap access to RGB-D im-
ages, as a result of the commercial success of the
Kinect sensor, there is an increasing demand in new
methods that will benefit from such data.
A lot of attention has been drawn to 3D recon-
struction using dense RGB-D data (Izadi et al., 2011;
Neumann et al., 2011; Dou et al., 2013). Such data
are obtained by multiple acquisitions of the consid-
ered 3D scene under different viewpoints. The main
drawback of these approaches is that they require a
registration step between the different views. In or-
der to make the 3D reconstruction of a scene feasible
despite the absence of a huge amount of data, this pa-
per focuses on reconstructing a scene using a single
RGB-D image. This challenging problem has been
less addressed in the literature (Neverova et al., 2013).
The lack of information about the shape and position
of the different objects in the scene due to the single
viewpoint and occlusions makes the task significantly
more difficult. Therefore, various assumptions have
to be made in order to make the 3D reconstruction
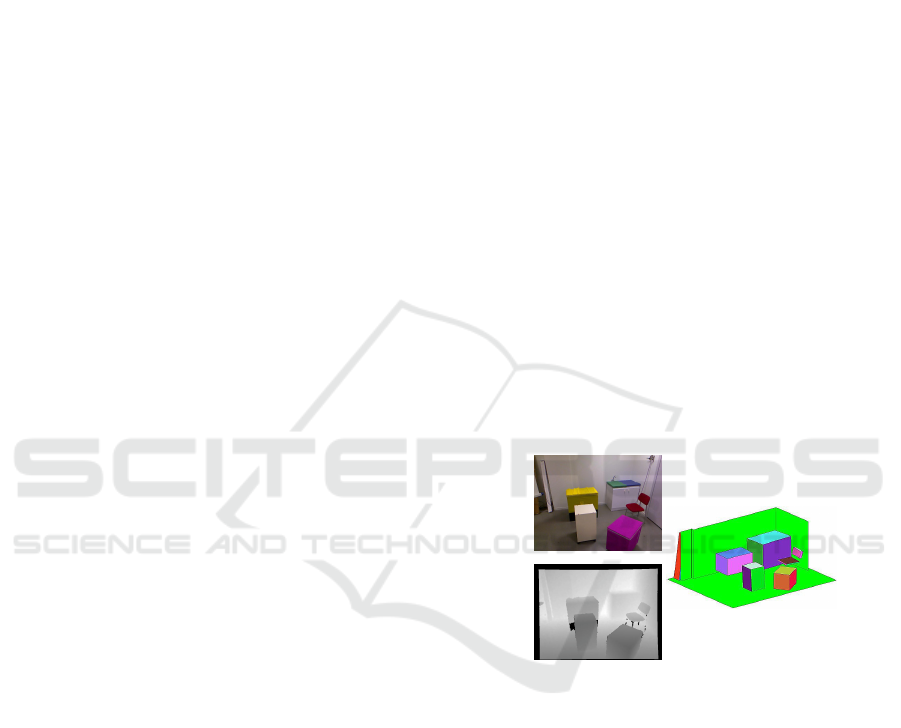
Figure 1: (left) Color and Depth input images, (right) 3D
reconstruction of the scene.
feasible (object nature, orientation).
In this paper, starting from a single RGB-D image,
a fully automatic method for the 3D reconstruction of
an indoor scene without constraining the object orien-
tations is proposed. In the first step, the layout of the
room is identified by solving the parsing problem of
an indoor scene. For this purpose, the work of (Taylor
and Cowley, 2012) is exploited and improved by bet-
ter addressing the problem of the varying depth reso-
lution of the Kinect sensor while fitting planes. Then,
the objects of the scene are segmented by using a
novel plane-merging approach and a cuboid is fitted to
each of these objects. The reason behind the selection
of such representation is that most of the objects in a
common indoor scene, such as drawers, bookshelves,
394
Bokaris P., Muselet D. and TrÃl’meau A.
3D Reconstruction of Indoor Scenes using a Single RGB-D Image.
DOI: 10.5220/0006107803940401
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 394-401
ISBN: 978-989-758-227-1
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tables or beds have a cuboid shape. For the cuboid fit-
ting step, a new “double RANSAC”-based (Fischler
and Bolles, 1981) approach is proposed. The out-
put of the algorithm is a 3D reconstruction of the ob-
served scene, as illustrated in Fig. 1. In order to as-
sess the quality of the reconstruction, a new dataset
of captured 3D scenes is created, in which the ex-
act positions of the objects are measured by using a
telemeter. In fact, by knowing the exact 3D positions
of the objects, one can objectively assess the accuracy
of all the 3D reconstruction algorithms. This ground
truth dataset will be publicly available for future com-
parisons. Finally, the proposed method is tested on
this new dataset as well as on the NYU Kinect dataset
(Silberman et al., 2012). The obtained results indicate
that the proposed algorithm outperforms the state-of-
the-art even in cases with strong occlusion and clutter.
2 RELATED WORK
The related research to the problem examined in this
paper can be separated in two different categories.
The first category is the extraction of the main layout
of the scene while the second one is the 3D represen-
tation of the objects in the scene.
Various approaches have been followed in com-
puter vision for recovering the spatial layout of a
scene. Many of them are based on the Manhat-
tan World assumption (Coughlan and Yuille, 1999).
Some solutions only consider color images without
exploiting depth information (Mirzaei and Roumeli-
otis, 2011; Bazin et al., 2012; Hedau et al., 2009;
Schwing and Urtasun, 2012; Zhang et al., 2014) and
hence provide only coarse 3D layouts. With Kinect,
depth information is available, which can be signifi-
cantly beneficial in such applications. (Zhang et al.,
2013) expanded the work of (Schwing and Urtasun,
2012) and used the depth information in order to
reduce the layout error and estimate the clutter in
the scene. (Taylor and Cowley, 2011) developed a
method that parses the scene in salient surfaces using
a single RGB-D image. Moreover, (Taylor and Cow-
ley, 2012) presented a method for parsing the Manhat-
tan structure of an indoor scene. Nonetheless, these
works are based on assumptions about the content of
the scene (minimum size of a wall, minimum ceiling
height, etc.). Moreover, in order to address the prob-
lem of the depth accuracy in Kinect, they used the
depth disparity differences, which is not the best so-
lution as it is discussed in section 3.1.
Apart from estimating the layout of an indoor
scene, a considerable amount of research has been
done in estimating surfaces and objects from RGB-
D images. (Richtsfeld et al., 2012) used RANSAC
and NURBS (Piegl, 1991) for detecting unknown 3D
objects in a single RGB-D image, requiring learn-
ing data from the user. (Cupec et al., 2011; Jiang,
2014) segment convex 3D shapes but their grouping
to complete objects remains an open issue. To the
best of our knowledge, (Neverova et al., 2013) was the
first method that proposed a 3D reconstruction start-
ing from a single RGB-D image under the Manhat-
tan World assumption. However, it has the significant
limitation that it only reconstructs 3D objects which
are parallel or perpendicular to the three main orien-
tations of the Manhattan World. (Lin et al., 2013) pre-
sented a holistic approach that takes into account 2D
segmentation, 3D geometry and contextual relations
between scenes and objects in order to detect and clas-
sify objects in a single RGB-D image. Despite the
promising nature of such approach it is constrained
by the assumption that the objects are parallel to the
floor. In addition, the cuboid fitting to the objects is
performed as the minimal bounding cube of the 3D
points, which is not the optimal solution when work-
ing with Kinect data, as discussed by (Jia et al., 2013).
Recently, an interesting method that introduced the
“Manhattan Voxel” was developed by (Ren and Sud-
derth, 2016). In their work the 3D layout of the room
is estimated and detected objects are represented by
3D cuboids. Being a holistic approach that prunes
candidates, there is no guarantee that a cuboid will be
fitted to each object in the scene. Based on a single
RGB image, (Dwibedi et al., 2016) developed a deep-
learning method to extract all the cuboid-shaped ob-
jects in the scene. This novel technique differs from
our perspective since the intention is not to fit a cuboid
to a 3D object but to extract a present cuboid shape in
an image.
The two methods (Jiang and Xiao, 2013; Jia et al.,
2013) are similar with our approach since their au-
thors try to fit cuboids using RANSAC to objects
of a 3D scene acquired by a single RGB-D image.
(Jia et al., 2013) followed a 3D reasoning approach
and investigated different constraints that have to be
applied to the cuboids, such as occlusion, stability
and supporting relations. However, this method is
applicable only to pre-labeled images. (Jiang and
Xiao, 2013) coarsely segment the RGB-D image into
roughly piecewise planar patches and for each pair of
such patches fit a cuboid to the two planes. As a re-
sult, a large set of cuboid candidates is created. Fi-
nally, the best subset of cuboids is selected by opti-
mizing an objective function, subject to various con-
straints. Hence, they require strong constraints (such
as intersections between pairs of cuboids, number of
cuboids, covered area on the image plane, occlusions
3D Reconstruction of Indoor Scenes using a Single RGB-D Image
395
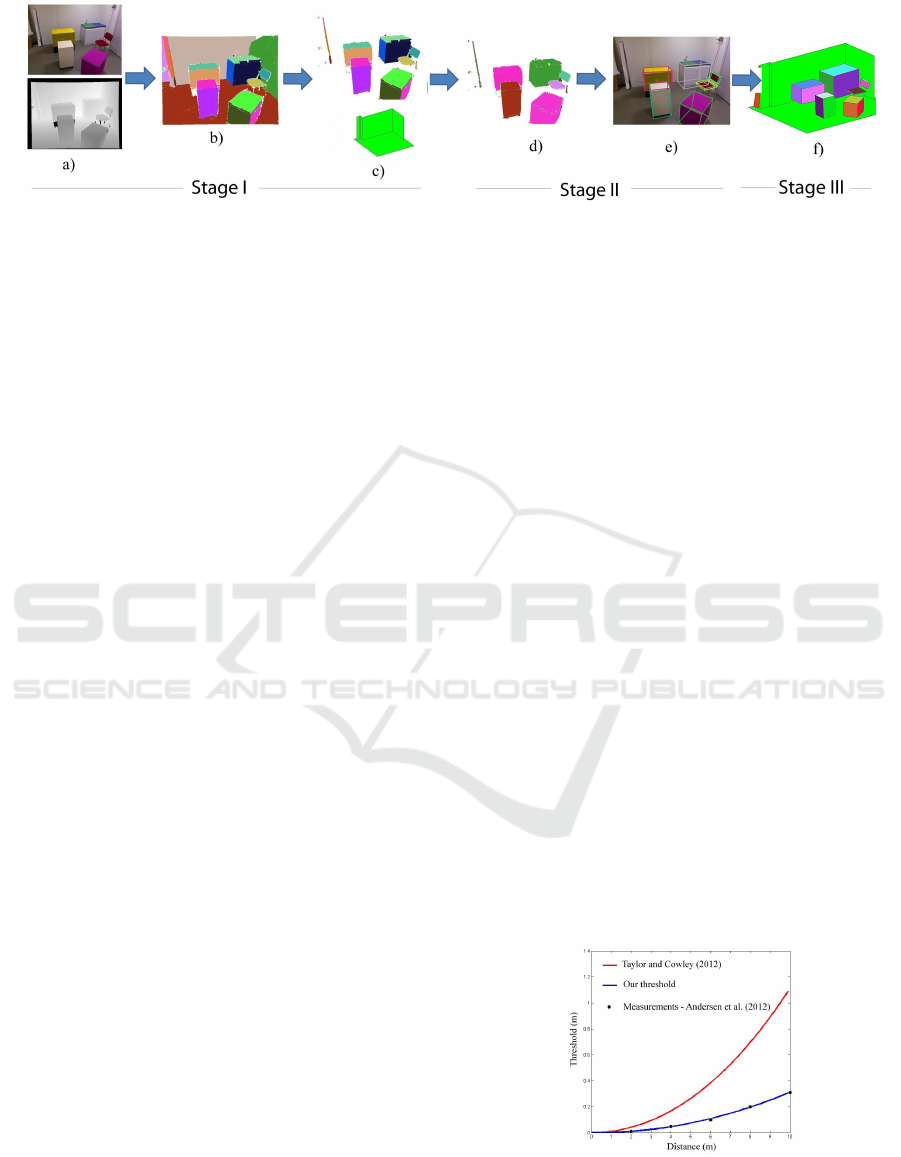
Figure 2: An overview of the proposed method.
among cuboids, etc.) during the global optimization
process. This pioneer approach provides promising
results in some cases but very coarse ones in others
even for dramatically simple scenes (see Figs. 9 and
10 and images shown in (Jiang and Xiao, 2013)).
In this paper, in order to improve the quality of the
reconstruction, we followed a different approach and
propose an accurate segmentation step using novel
constraints. The objective is to isolate the objects
from each other before fitting the cuboids due to the
fact that the cuboid fitting step can be significantly
more efficient and accurate when working with each
object independently.
3 METHOD OVERVIEW
The method proposed in this paper can be separated
in three different stages. The first stage is to define the
layout of the scene. This implies to extract the floor,
all the walls and their intersections. For this purpose,
the input RGB-D image is segmented by fitting 3D
planes to the point cloud. The second stage is to seg-
ment all the objects in the scene and to fit a cuboid
to each one separately. Finally, in stage 3 the results
of the two previous stages are combined in order to
visualize the 3D model of the room. An overview of
this method can be seen in Fig. 2
3.1 Parsing the Indoor Scene
In order to parse the indoor scene and extract the com-
plete layout of the scene, an approach based on the
research of (Taylor and Cowley, 2012) is used. Ac-
cording to this work, the image is separated in pla-
nar regions by fitting planes to the point cloud using
RANSAC, as can be seen in Fig 2b. Then the floor
and the walls are detected by analyzing their surfaces,
angles with vertical and angles between them. This
method provides the layout of the room in less than
6 seconds. The final result of the layout of the scene,
visualized in the 3D Manhattan World, can be seen in
the bottom of Fig. 2c.
While working with depth values provided by the
Kinect sensor, it is well known that the depth accu-
racy is not the same for the whole range of depth
(Andersen et al., 2012), i.e. the depth information is
more accurate for points that are close to the sensor
than for points that are farther. This has to be taken
into account in order to define a threshold according
to which the points will be considered as inliers in a
RANSAC method. Points with a distance to a plane
inside the range of Kinect error should be treated as
inliers of that plane. In order to address this prob-
lem, (Taylor and Cowley, 2012) proposed to fit planes
in the disparity (inverse of depth) image instead of
working directly with depth. This solution improves
the accuracy but we claim that the best solution would
be to use a threshold for the computation of the resid-
ual errors in RANSAC that increases according to the
distance from the sensor. This varying threshold is
computed once by fitting a second degree polynomial
function to the depth values provided by (Andersen
et al., 2012). The difference between the varying
threshold proposed by (Taylor and Cowley, 2012) us-
ing disparity and the one proposed here can be seen
in Fig. 3. As observed in the graph, our threshold
follows significantly better the experimental data of
(Andersen et al., 2012) compared to the threshold of
(Taylor and Cowley, 2012).
Figure 3: Comparison of the varying threshold set in (Taylor
and Cowley, 2012) and the one proposed in this paper.
The impact of the proposed threshold on the room
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
396

layout reconstruction can be seen in the two character-
istic examples in Fig. 4. As it can be easily noticed,
with the new threshold the corners of the walls are
better defined and complete walls are now detected.
This adaptive threshold is further used in the cuboid
fitting step and significant improvements are obtained
for various objects, as it is discussed in section 3.3.
Figure 4: Impact of the proposed threshold in the room lay-
out reconstruction. (left column): Input image (middle col-
umn): Threshold in (Taylor and Cowley, 2012). (right col-
umn): Threshold proposed here.
3.2 Segmenting the Objects in the Scene
As an output of the previous step, the input image is
segmented in planar regions (Fig. 2b). Moreover, it
is already known which of these planar regions corre-
spond to the walls and to the floor in the scene (bot-
tom of Fig. 2c). By excluding them from the image,
only planar regions that belong to different objects in
the image are left, as can be seen in the top of Fig.
2c. In order to segment the objects in the scene, the
planar regions that belong to the same object have to
be merged. For this purpose, the edges of the pla-
nar surfaces are extracted using a Canny edge detec-
tor and the common edge between neighboring sur-
faces is calculated. Then, we propose to merge two
neighbor surfaces by analyzing i)the depth continu-
ity across surface boundaries, ii)the angle between the
surface normals and iii)the size of each surface.
For the first criterion, we consider that two neigh-
boring planar surfaces that belong to the same object
have similar depth values in their common edge and
different ones when they belong to different objects.
The threshold in the mean depth difference is set to 60
mm in all of our experiments. The second criterion is
necessary in order to prevent patches that do not be-
long to the same object to be merged. In fact, since
this study is focused on cuboids, the planar surfaces
that should be merged need to be either parallel or
perpendicular to each other. The final criterion forces
neighboring planar surfaces to be merged if both of
their sizes are relatively small (less than 500 points).
The aim is to regroup all small planar regions that
constitute an object that does not have a cuboid shape
(sphere, cylinder, etc.). This point is illustrated in Fig.
5, where one cylinder is extracted. The proposed al-
gorithm checks each planar region with respect to its
neighboring regions (5 pixels area) in order to decide
whether they have to be merged or not. This step is
crucial for preparing the data before fitting cuboids in
the next step.
Figure 5: An example of merging objects that are not
cuboids.(left) original input image. (middle):Before merg-
ing. (right):After merging.
3.3 Fitting a Cuboid to Each Object
The aim of this section is to fit an oriented cuboid to
each object. As discussed by (Jia et al., 2013), the
optimal cuboid is the one with the minimum volume
and the maximum points on its surface. Since the im-
age has been already segmented, i.e. each object is
isolated from the scene, the strong global constraints
used by (Jiang and Xiao, 2013) can be relaxed and
more attention to each cuboid can be drawn. There-
fore, we propose the following double-RANSAC pro-
cess. Two perpendicular planar surfaces are sufficient
to define a cuboid. Hence, in order to improve the ro-
bustness of the method, we propose to consider only
the two biggest planar surfaces of each object. In fact,
in a single viewpoint of a 3D scene only two surfaces
of an object are often visible. Thus, first, for each seg-
mented object, the planar surface with the maximum
number of inliers is extracted by fitting a plane to the
corresponding point cloud using RANSAC (with our
adaptive threshold described in section 3.1). The ori-
entation of this plane provides the first axis of the
cuboid. We consider that the second plane is perpen-
dicular to the first one but this information is not suffi-
cient to define the second plane. Furthermore, in case
of noise or when the object is thin (few points in the
other planes) or far from the acquisition sensor, the
3D orientation of the second plane might be poorly es-
timated. Hence, we propose a robust solution which
projects all the remaining points of the point cloud
on the first plane and then fits a line using another
RANSAC step to the projected points. The orienta-
tion of this line provides the orientation of the second
plane. This is visualized in Fig. 6. In the experiments
section, it is shown that this double RANSAC pro-
cess provides very good results while fitting cuboids
to small, thin or far objects.
Furthermore, as a second improvement of the
3D Reconstruction of Indoor Scenes using a Single RGB-D Image
397

RANSAC algorithm, we propose to analyze its qual-
ity criterion. In fact, RANSAC fits several cuboids to
each object (10 cuboids in our implementation) and
selects the one that optimizes a given quality crite-
rion. Thus, the chosen quality criterion has a big im-
pact on the results. As it was discussed before, in
RGB-D data a well estimated cuboid should have a
maximum of points on its surface. Given one cuboid
returned by one RANSAC iteration, we denote area
f 1
and area
f 2
the areas of its two faces and area
c1
and
area
c2
the areas defined by the convex hull of the
inlier points projected on these two faces, respec-
tively. In order to evaluate the quality of the fitted
cuboid, Jiang and Xiao proposed the measure defined
as min(
area
c1
area
f 1
,
area
c2
area
f 2
) which is equal to the maximum
value of 1 when the fitting is perfect. This measure
assimilates the quality of a cuboid to the quality of
the worst plane among the two, without taking into
account the quality of the best fitting plane. Never-
theless, the quality of the best fitting plane could help
in deciding between two cuboids characterized by the
same ratio. Furthermore, the relative sizes of the two
planes are completely ignored in this criterion. In-
deed, in case of a cuboid composed by a very big
plane and a very small one, this measure does not pro-
vide any information about which one is well fitted to
the data, although this information is crucial to assess
the quality of the cuboid fitting. Consequently, we
propose to use a similar criterion which does not suf-
fer from these drawbacks: ratio =
area
c1
+area
c2
area
f 1
+area
f 2
. Like-
wise, for an ideal fitting this measure is equal to 1.
In order to illustrate the improvement due to the pro-
posed adaptive threshold (of section 3.1) and the pro-
posed ratio in the cuboid fitting step, 3 typical exam-
ples are shown in in Fig. 7. There, it can be seen that
the proposed method (right column) increases signif-
icantly the performance for far and thin objects.
Figure 6: Illustration of our cuboid fitting step. (left): The
inliers of the first fitted 3D plane are marked in green. The
remaining points and their projection on the plane is marked
in red and blue, respectively. A 3D line is fitted to these
points. (right): The fitted cuboid.
In the final step of the method, the fitted cuboids
are projected in the Manhattan World of the scene, in
order to obtain the 3D model of the scene, as illus-
trated in Fig. 2f. Additionally, the cuboids are pro-
Figure 7: Impact of the selected threshold and ratio on the
cuboid fitting. (left): Fixed global threshold and ratio pro-
posed here. (middle): Varying threshold proposed here and
ratio proposed in (Jiang and Xiao, 2013) (right): Threshold
and ratio proposed here.
jected on the input RGB image in order to demon-
strate how well the fitting procedure performs (see
Fig. 2e).
4 NEW GROUND TRUTH
DATASET
For an objective evaluation, a new dataset with mea-
sured ground truth 3D positions was built. This
dataset is composed by 4 different scenes and each
scene is captured under 3 different viewpoints and 4
different illuminations. Thus, each scene consists of
12 images. For all these 4 scenes, the 3D positions
of the vertices of the objects were measured using a
telemeter. These coordinates constitute the ground
truth. As the reference point was considered the in-
tersection point of the three planes of the Manhattan
World. It should be noted that the measurement of
vertices positions in a 3D space with a telemeter is
not perfectly accurate and the experimental measure-
ments show that the precision of these ground truth
data is approximately ±3.85mm. Some of the dataset
images can be seen in the figures of the next section.
5 EXPERIMENTS
5.1 Qualitative Evaluation
As a first demonstration of the proposed method some
reconstruction results are shown in Fig. 8. It can
be seen that it performs well even in very demand-
ing scenes with strong clutter. Moreover, it is able to
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
398

handle small and thin objects with convex surfaces.
Subsequently, our method is compared with the re-
cent method proposed by (Jiang and Xiao, 2013)
since their method not only performs cuboid fitting
to RGB-D data but also outperforms various other ap-
proaches. A first visual comparison can be performed
on both our dataset and the well-known NYUv2
Kinect Dataset (Silberman et al., 2012) in Figs. 9
and 10, respectively. It should be noted that all the
thresholds in this paper were tuned to the provided
numbers for both ours and the NYUv2 dataset. This
point highlights the generality of our method that was
tested in a wide variety of scenes. (Jiang and Xiao,
2013) have further improved their code and its last re-
lease (January 2014) was used for our comparisons.
A random subset of 40 images that contain informa-
tion about the layout of the room was selected from
the NYUv2 Kinect dataset. The results imply that
our method provides significantly better reconstruc-
tions than this state-of-the-art approach. Furthermore,
in various scenes in Fig. 9, it can be observed that
the global cuboid fitting method of (Jiang and Xiao,
2013) can result in cuboids that do not correspond to
any object in the scene. The reason for this is the large
set of candidate cuboids that they produce for each
two planar surfaces in the image. The strong con-
straints that they apply afterwards, in order to elimi-
nate the cuboids which do not correspond to an object,
do not always guarantee an optimal solution. Another
drawback of this approach is that the aforementioned
constraints might eliminate a candidate cuboid that
does belong to a salient object. In the next section,
the improvement of our approach is quantified by an
exhaustive test on our ground truth dataset.
5.2 Quantitative Evaluation
In order to test how accurate is the output of the pro-
posed method and how robust it is against different
viewpoints and illuminations, the following proce-
dure was used. The 3D positions of the reconstructed
vertices are compared to their ground truth positions
by measuring their Euclidean distance. The mean
value (µ) and the standard deviation (σ) of these Eu-
clidean distances as well as the mean running time of
the algorithm over the 12 images of each scene are
presented in Table 1. The results using the code of
(Jiang and Xiao, 2013) are included in the table for
comparison. It should be noted that since this method
does not provide the layout of the room, their esti-
mated cuboids are rotated to the Manhattan World ob-
tained by our method for each image.
During the experiments, it was noticed that the re-
sults of (Jiang and Xiao, 2013) were very unstable
Figure 8: Various results of the proposed method on differ-
ent real indoor scenes.
Table 1: Mean value (µ) and standard deviation (σ) of the
Euclidean distances in mm between the ground truth and
the reconstructed vertices over the 12 images of each scene
and mean running time (t) in seconds of each algorithm.
Our method (Jiang and Xiao, 2013)
µ σ t
∗
µ σ t
∗
Scene 1 52.4 8.8 8.8 60.9 19.6 25.3
Scene 2 60.4 20.9 12.3 132.7 65.9 26.1
Scene 3 69.7 20.2 14.2 115.7 48.3 27.2
Scene 4 74.9 35.3 12.2 145.3 95.4 26.8
∗
Running on a Dell Inspiron 3537, i7 1.8 GHz, 8 GB RAM
and various times their method could not provide a
cuboid for each object in the scene. Moreover, since
the RANSAC algorithm is non-deterministic, neither
are both our approach and the one of (Jiang and Xiao,
2013). In order to quantify this instability, each al-
gorithm was run 10 times on the exact same image
(randomly chosen) of each scene. The mean (µ) and
standard deviation (σ) of the Euclidean distance be-
tween the ground truth and the reconstructed 3D po-
sitions were measured. The results are presented in
Table 2. It should be noted that the resulting 3D po-
sitions of both algorithms are estimated according to
the origin of the estimated layout of the room. Thus,
the poor resolution of the Kinect sensor is perturb-
ing the estimation of both the layout and the 3D po-
sitions of the objects and the errors are cumulating.
However, the values of the mean and standard devia-
tion for our method are relatively low with respect to
the depth resolution of Kinect sensor at that distance,
which is approximately 50 mm at 4 meters (Andersen
3D Reconstruction of Indoor Scenes using a Single RGB-D Image
399

Figure 9: Comparison of the results obtained by (Jiang and Xiao, 2013) (odd rows) and the method proposed in this paper
(even rows) for the NYUv2 Kinect dataset.
Figure 10: Random results of (Jiang and Xiao, 2013) (top 2
rows) and the corresponding ones of our method (bottom 2
rows) for the ground truth dataset.
et al., 2012). Furthermore, the standard deviations of
Table 2 are considerably low and state a maximum
deviation of the result less than 4.5 mm.
Finally, as can be seen in Table 1, the computa-
tional cost of our method is dramatically lower than
the one of (Jiang and Xiao, 2013). It should be noted
that in this running time our method estimates the
complete 3D scene reconstruction of the scene. It re-
quires around 9 seconds for a simple scene and less
Table 2: Mean value (µ) and standard deviation (σ) of the
Euclidean distances between the ground truth and the re-
constructed vertices over 10 iterations of the algorithm on
the same image.
Our method (Jiang and Xiao, 2013)
µ (mm) σ (mm) µ (mm) σ (mm)
Scene 1 50.2 2.7 54.3 10.5
Scene 2 57.0 2.9 104.9 37.8
Scene 3 81.9 2.7 93.2 20.5
Scene 4 72.0 4.5 195.4 35.7
than 20 seconds for a demanding scene with strong
clutter and occlusion on a Dell Inspiron 3537, i7 1.8
Ghz, 8 GB RAM. It is worth mentioning that no op-
timization was done in the implementation. Thus, the
aforementioned running times could be considerably
lower.
6 CONCLUSIONS
In this paper, a new method that provides accurate 3D
reconstruction of an indoor scene using a single RGB-
D image is proposed. First, the layout of the scene is
extracted by exploiting and improving the method of
(Taylor and Cowley, 2012). The latter is achieved by
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
400

better addressing the problem of the non-linear rela-
tionship between depth resolution and distance from
the sensor. For the 3D reconstruction of the scene,
we propose to fit cuboids to the objects composing
the scene since this shape is well adapted to most of
the indoor objects. Unlike the state-of-the-art method
(Jiang and Xiao, 2013) that runs a global optimization
process over sets of cuboids with strong constraints,
we propose to automatically segment the image, as a
preliminary step, in order to focus on the local cuboid
fitting on each extracted object. It is shown that our
method is robust to viewpoint and object orientation
variations. It is able to provide meaningful interpreta-
tions even in scenes with strong clutter and occlusion.
More importantly, it outperforms the state-of-the-art
approach not only in accuracy but also in robustness
and time complexity. Finally, a ground truth dataset
for which the exact 3D positions of the objects have
been measured is provided. This dataset can be used
for future comparisons.
REFERENCES
Andersen, M. R., Jensen, T., Lisouski, P., Mortensen, A.,
Hansen, M., Gregersen, T., and Ahrendt, P. (2012).
Kinect depth sensor evaluation for computer vision
applications. Technical Report ECE-TR-06, Aarhus
University.
Bazin, J. C., Seo, Y., Demonceaux, C., Vasseur, P., Ikeuchi,
K., Kweon, I., and Pollefeys, M. (2012). Globally
optimal line clustering and vanishing point estimation
in manhattan world. In CVPR, pages 638–645.
Coughlan, J. M. and Yuille, A. L. (1999). Manhattan world:
Compass direction from a single image by bayesian
inference. In ICCV, pages 941–947.
Cupec, R., Nyarko, E. K., and Filko, D. (2011). Fast 2.5d
mesh segmentation to approximately convex surfaces.
In ECMR, pages 49–54.
Dou, M., Guan, L., Frahm, J.-M., and Fuchs, H. (2013).
Exploring high-level plane primitives for indoor 3d re-
construction with a hand-held rgb-d camera. In ACCV
2012 Workshops, volume 7729 of Lecture Notes in
Computer Science, pages 94–108. Springer Berlin
Heidelberg.
Dwibedi, D., Malisiewicz, T., Badrinarayanan, V., and Ra-
binovich, A. (2016). Deep cuboid detection: Beyond
2d bounding boxes.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: A paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Commun. ACM, 24(6):381–395.
Hedau, V., Hoiem, D., and Forsyth, D. (2009). Recovering
the spatial layout of cluttered rooms. In ICCV, pages
1849–1856.
Izadi, S., Kim, D., Hilliges, O., Molyneaux, D., Newcombe,
R., Kohli, P., Shotton, J., Hodges, S., Freeman, D.,
Davison, A., and Fitzgibbon, A. (2011). Kinectfu-
sion: real-time 3d reconstruction and interaction using
a moving depth camera. In UIST, pages 559–568.
Jia, Z., Gallagher, A., Saxena, A., and Chen, T. (2013). 3d-
based reasoning with blocks, support, and stability. In
CVPR.
Jiang, H. (2014). Finding Approximate Convex Shapes in
RGBD Images, pages 582–596. Springer International
Publishing, Cham.
Jiang, H. and Xiao, J. (2013). A linear approach to matching
cuboids in rgbd images. In CVPR.
Lin, D., Fidler, S., and Urtasun, R. (2013). Holistic scene
understanding for 3d object detection with rgbd cam-
eras. In ICCV, pages 1417–1424.
Mirzaei, F. and Roumeliotis, S. (2011). Optimal estimation
of vanishing points in a manhattan world. In ICCV,
pages 2454–2461.
Neumann, D., Lugauer, F., Bauer, S., Wasza, J., and
Hornegger, J. (2011). Real-time rgb-d mapping and
3-d modeling on the gpu using the random ball cover
data structure. In ICCV Workshops, pages 1161–1167.
Neverova, N., Muselet, D., and Trémeau, A. (2013). 2 1/2
d scene reconstruction of indoor scenes from single
rgb-d images. In CCIW, pages 281–295.
Piegl, L. (1991). On nurbs: a survey. IEEE Computer
Graphics and Applications, 11(1):55–71.
Ren, Z. and Sudderth, E. B. (2016). Three-dimensional ob-
ject detection and layout prediction using clouds of
oriented gradients. IEEE CVPR.
Richtsfeld, A., Mörwald, T., Prankl, J., Balzer, J., Zillich,
M., and Vincze, M. (2012). Towards scene under-
standing - object segmentation using rgbd-images. In
CVWW.
Schwing, A. and Urtasun, R. (2012). Efficient exact infer-
ence for 3d indoor scene understanding. In ECCV,
volume 7577 of Lecture Notes in Computer Science,
pages 299–313. Springer Berlin Heidelberg.
Silberman, N., Hoiem, D., Kohli, P., and Fergus, R. (2012).
Indoor segmentation and support inference from rgbd
images. In ECCV, pages 746–760. Springer.
Taylor, C. and Cowley, A. (2011). Fast scene analysis using
image and range data. In ICRA, pages 3562–3567.
Taylor, C. and Cowley, A. (2012). Parsing indoor scenes
using rgb-d imagery. In RSS.
Zhang, J., Kan, C., Schwing, A. G., and Urtasun, R. (2013).
Estimating the 3d layout of indoor scenes and its clut-
ter from depth sensors. In ICCV, pages 1273–1280.
Zhang, Y., Song, S., Tan, P., and Xiao, J. (2014). PanoCon-
text: A Whole-Room 3D Context Model for Panoramic
Scene Understanding, pages 668–686. Springer Inter-
national Publishing, Cham.
3D Reconstruction of Indoor Scenes using a Single RGB-D Image
401
