Specialization of a Generic Pedestrian Detector to a Specific Traffic Scene
by the Sequential Monte-Carlo Filter and the Faster R-CNN
Ala Mhalla
1,2
, Thierry Chateau
2
, Sami Gazzah
1
and Najoua Essoukri Ben Amara
1
1
LATIS ENISo, University of Sousse, Sousse, Tunisia
2
Institut Pascal, Blaise Pascal University, Clermont Ferrand, France
Keywords:
Transfer Learning, Deep Learning, Faster R-CNN, Sequential Monte Carlo Filter (SMC), Pedestrian
Detection.
Abstract:
The performance of a generic pedestrian detector decreases significantly when it is applied to a specific scene
due to the large variation between the source dataset used to train the generic detector and samples in the target
scene. In this paper, we suggest a new approach to automatically specialize a scene-specific pedestrian detector
starting with a generic detector in video surveillance without further manually labeling any samples under a
novel transfer learning framework. The main idea is to consider a deep detector as a function that generates
realizations from the probability distribution of the pedestrian to be detected in the target. Our contribution
is to approximate this target probability distribution with a set of samples and an associated specialized deep
detector estimated in a sequential Monte Carlo filter framework. The effectiveness of the proposed framework
is demonstrated through experiments on two public surveillance datasets. Compared with a generic pedestrian
detector and the state-of-the-art methods, our proposed framework presents encouraging results.
1 INTRODUCTION
Pedestrian detection is always a complicated and
uncertain area in many important applications of
computer vision due to several factors like different
poses, illumination variations, image resolution and
camera angle. However, most pedestrian detectors
are learnt with generic labeled datasets that are
sampled from a large number of situations to cover the
maximum variability of the pedestrian. When tested
on a specific scene, the performance of such detector
drops significantly due to the large variations between
the target scene and the source training dataset. We
can solve this problem by transfer learning, which can
specialize a generic pedestrian detector to a specific
scene. Much of the state-of-the-art research have been
made to develop scene-specific pedestrian detectors,
whose training process is aided by generic detectors
for automatically collecting training samples from
target scenes (Ma
ˆ
amatou et al., 2016), (Wang et al.,
2014).
The aim of this paper is to automatically generate
a specialized pedestrian detector trained for a target
video, hence performing better than the generic
detector.
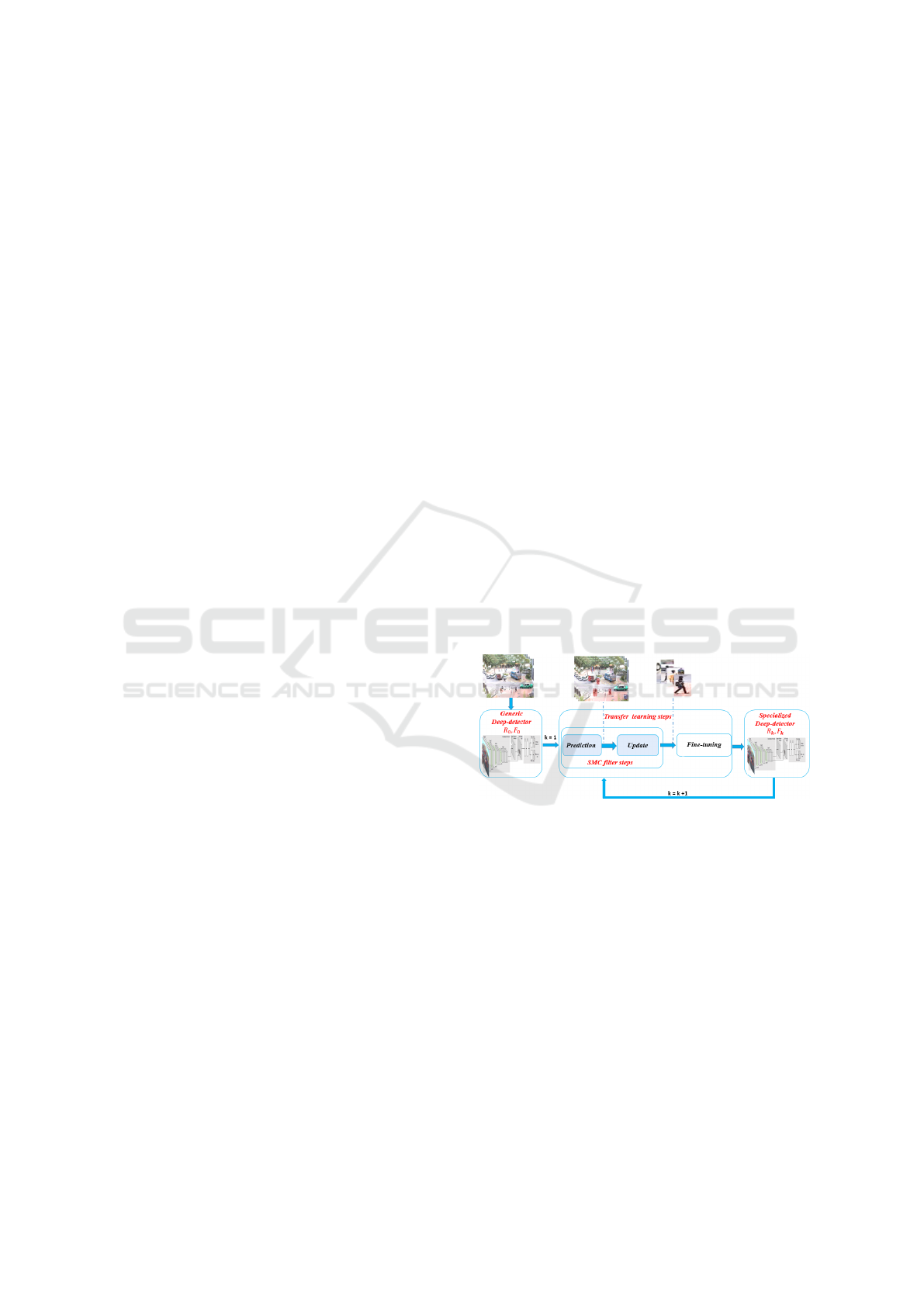
Figure 1: Block diagram of the proposed approach.
1.1 Motivations and Contributions
We propose a novel framework which starts from a
generic pedestrian detector to train a scene-specific
detector automatically. Our main motivations and
contributions are summarized below.
• Transfer learning method to specialize generic
pedestrian detector into a target video scene
• A likelihood function that used to select the
positive samples and remove the negative ones
from a specific scene
• Evaluating our proposed approach to the state of
the art on two public datasets
The rest of the paper is organized as follows. The
Mhalla A., Chateau T., Gazzah S. and Essoukri Ben Amara N.
Specialization of a Generic Pedestrian Detector to a Specific Traffic Scene by the Sequential Monte-Carlo Filter and the Faster R-CNN.
DOI: 10.5220/0006097900170023
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 17-23
ISBN: 978-989-758-225-7
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
17

related literature is reviewed in section 2, followed by
a detailed description of our approach in section 3.
We describe the experiments and results in section 4
and finally conclude in section 5.
2 RELATED WORK
In this section, firstly, we describe the related
works for transfer learning and deep learning, then
we present the Faster R-CNN deep network (Ren
et al., 2015) and the SMC scene specialization
algorithm (Ma
ˆ
amatou et al., 2016) which are two
main references for our paper.
Transfer learning aims to address the problem
when the distribution of the training data from
the source domain is different from that of the
target domain. Over the past decades, numerous
methods have been suggested for transfer learning in
pedestrian detection (Ma
ˆ
amatou et al., 2016), (Wang
et al., 2014). Recently, addressing this problem
with deep neuronal networks has gained an increased
attention. Some deep models have been investigated
in the unsupervised and transfer learning challenge
(Guyon et al., 2011). Transfer learning using deep
models has been turned out to be effective in some
challenges (Mesnil et al., 2012), (Goodfellow et al.,
2012) like traffic-object detection (Zeng et al., 2014),
(Li et al., 2015) and sentiment analysis (Glorot et al.,
2011).
In addition, deep learning has led to great
performance on a variety problems of computer
vision like vehicle detection (Li et al., 2015), action
recognition (Will Y. Zou, 2011), face recognition
(Huang et al., 2012), (Taigman et al., 2014) and image
classification (Duan et al., 2009). Among various
types of deep neural networks, convolutional neuronal
networks (Jia et al., 2014), (LeCun et al., 1998)
have been proved to make great successes in machine
learning and computer vision applications.
In this paper, we propose a new framework based
on SMC filter to specialize the recent deep detector,
the Faster R-CNN (Ren et al., 2015) for pedestrian
detection.
The Faster R-CNN (Ren et al., 2015) has been
put forward to accurately detect general objects in
pictures. It has achieved a state-of-the-art 73.2
mean average precision on the PASCAL VOC 2007
dataset (Everingham et al., 2010). By using both
region-proposal network for localization task and
detector network together into one large network.
The Faster R-CNN was composed of two
modules: The first module is a Region Proposal
Network (RPN) that provided a set of rectangular
object proposals from an input image, and the second
one was the Fast R-CNN network which took as
inputs this set of object proposals and then used them
for detection. The entire system was a single, unified
network for object detection.
In this paper, the proposed method is developed
based on the SMC framewoek (Ma
ˆ
amatou et al.,
2016) due to its superb efficiency and performance in
traffic object detection. Maamatou et al. (Ma
ˆ
amatou
et al., 2016) put forward a transductive transfer
learning method based on an SMC filter to iteratively
build a new specialized dataset that was used to
train a new specialized pedestrian detector. This
new produced dataset is composed of both source
and target samples that estimated the unknown target
distribution. The specialization algorithm was applied
on a HOG-SVM detector. The general framework
presented in this paper is inspired from this work. We
propose a transfer learning framework based on the
SMC filter to specialize the Faster R-CNN detector
to a target scene. The specialization framework
presented in this paper proposes various differences
over the SMC framework proposed in (Ma
ˆ
amatou
et al., 2016), we cite mainly: we remove the sampling
step of the SMC filter and keeping only the prediction
and the update steps. The aim of this improvement is
to optimize the specialization chain.
In this section, we purport an approach based
on the SMC filter to automatically specialize the
Faster R-CNN deep model to a target scene for
pedestrian detection. The block diagram of our
suggested specialized Faster R-CNN is given in
Fig.1. At the first iteration, we fine-tune an public
ImageNet-pre-trained model (VGG 16) (Simonyan
and Zisserman, 2014) to the Pascal VOC dataset to
create a generic pedestrian detector. This latter is
utilized in the first step of the SMC ”Prediction” to
suggest samples from the target scene and then we
apply the likelihood function in the update step to
correctly select weight samples from a specific scene
and determine the relevant ones for the specialization
process. A new specialized detector is fine-tuned by
the specialized dataset in the fine-tuning step and it
will become the input of the prediction step in the
next iteration. The prediction, update and fine-tuning
steps are called until a stopping criterion is reached,
for example a fixed number of iterations.
In what follows, we first describe the adaptation
of the two SMC steps with the Faster R-CNN model,
and then deal with the fine-tuning step.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
18

3 PROPOSED APPROACH
In this section, we present our method for specializing
a pedestrian detector to a target scene.
In this section, we present the general framework
for specializing a pedestrian detector to a target scene
based on the Faster R-CNN model and the SMC filter.
Let us define:
• I
t
.
= {I
(i)
}
I
i=1
a set of unlabelled images extracted
uniformly from a video sequence of a target scene.
• D
k
.
= {x
(n)
k
}
N
k
n=1
a specialized dataset at iteration k,
where the x
(n)
k
is a target pedestrian sample to be
detected in each target image of the set {I
(i)
}
I
i=1
.
This sample is defined by: x
(n)
k
.
= {p
(n)
k
, s
(n)
k
}
where p
(n)
k
.
= {u
(n)
k
, v
(n)
k
, w
(n)
k
, h
(n)
k
} is the position
of an pedestrian, with (u
(n)
k
, v
(n)
k
) being the upper
left coordinates of the pedestrian bounding box
and (w
(n)
k
, h
(n)
k
) being the width and the height
of the pedestrian bounding box and s
(n)
k
is an
associated score.
• {x
(n)
}
N
n=1
= Θ({I
(i)
}
I
i=1
;R , F ) a function that
applies the Faster R-CNN detector using the RPN
network model R for localization task and the
Fast R-CNN network model F for detection to
a set of images and provides a set of candidate
pedestrians with associated scores.
• {
˜
R ,
˜
F } = f ({I
(i)
}
I
i=1
, {x
(n)
}
N
n=1
;R , F ) a
fine-tuning function that returns the new
parameters
˜
R and
˜
F of the Faster R-CNN
network. The fine-tuning is performed from the
Faster R-CNN network with initial R parameters
for the RPN and initial F parameters for the Fast
R-CNN, utilizing a training dataset given by the
set of images {I
(i)
}
I
i
i=1
.
We assume that the specialized dataset D
k
approximates the probability distribution p(x
k
|z
k
) of
the pedestrian given by the target video sequence (1):
p(x
k
|z
k
) ≈ {x
(n)
k
}
N
k
n=1
(1)
where x
k
is a state vector that defines the target
pedestrian class and z
k
is an observation vector
provided by the target video sequence (ie: visual
spatio-temporal information).
We propose to estimate the current target
distribution from the previous one with the sequential
Bayesian filter (2):
p(x
k
|z
0:k
) =C.p(z
k
|x
k
)
Z
x
k−1
p(x
k
|x
k−1
)p(x
k−1
|z
0:k−1
)
(2)
Figure 2: Specialization steps.
where C is a normalisation factor. We assume that
this recursive framework converges toward the true
target distribution. The resolution of eq. 2 is divided
into two steps: prediction and update . These steps
are similar to the popular particle filter framework,
widely used to solve tracking problems in computer
vision (Smith et al., 2013). The details of the
two main steps of SMC filter are described in the
following subsections.
3.1 Prediction Step
The prediction step consists in applying the
Chapman-Kolmogorov equation (3):
p(x
k
|z
0:k−1
) =
Z
x
k−1
p(x
k
|x
k−1
)p(x
k−1
|z
0:k−1
)dx
k−1
(3)
This step uses the system dynamics term
p(x
k
|x
k−1
) between two iterations to produce
approximation (4):
p(x
k
|z
0:k−1
) ≈ {
˜
x
(n)
k
}
˜
N
k
n=1
(4)
We suggest to extract the proposal set {
˜
x
(n)
k
}
˜
N
k
n=1
from
the set of proposals produced by the Faster R-CNN
(see Fig.2.a) fine-tuned by {x
(n)
k
}
N
k−1
n=1
(the target set at
iteration k − 1):
{
˜
x
(n)
k
}
˜
N
k
n=1
= Θ({I
(i)
}
I
i
i=1
;R
k−1
, F
k−1
) (5)
with a first iteration (k = 1) that uses an initial generic
network (R
0
, F
0
).
Specialization of a Generic Pedestrian Detector to a Specific Traffic Scene by the Sequential Monte-Carlo Filter and the Faster R-CNN
19

3.2 Update Step
A weight
˜
π is estimated for each new target sample
of the dataset {
˜
x
(n)
k
}
˜
N
k
n=1
according to a likelihood
function (6):
p(z
k
|x
k
=
˜
x
n
k
) ∝
˜
π
n
k
(6)
The likelihood function utilizes visual
spatio-temporal information extracted from the
target video sequences. The update step gives as an
output a set of weighted target samples (see Fig.2.b),
which will be referred to as ”the weighted target
dataset” hereafter (7):
{(
˜
x
(n)
k
,
˜
π
(n)
k
)}
˜
N
k
n=1
(7)
where {
˜
x
(n)
k
,
˜
π
(n)
k
} represents a target sample and its
associated weight.
Several likelihood functions can be proposed.
More details are given in section 3.4
3.3 Fine-tuning Step
The fine-tuning step consists in training the RPN
and the Fast R-CNN networks to generate a new
specialized detector. The training of the RPN is
inspired from (Ren et al., 2015). We use a sliding
window approach to generate k bounding boxes for
each position on the feature map produced by the
last convolutional layer. Where each bounding box
is centered on the sliding window and is associated
with an aspect ratio and a scale (see Fig.3). The
overlap between the boxes of the specialized dataset
D
k
and the bounding boxes is then computed. A
proposal is designated as a positive training example
if it overlaps with a specialized dataset D
k
box
having an Intersection-over-Union (IoU) greater than
a predefined threshold, or if it is the bounding box
that has the highest IoU with D
k
. A proposal is
designated as a negative example if its maximum IoU
with any box of the specialized dataset D
k
is less than
another predefined threshold. The bounding boxes
that are neither positive nor negative do not contribute
to the training objective. After training the RPN, these
proposals are used to train the Fast R-CNN.
Therefore, a new specialized RPN network
and the Fast R-CNN network are generated being
fine-tuning with the specialized dataset. These
networks generate new pedestrians (bounding boxes)
in the target scene, according to (8):
{R
k
, F
k
} = f (I
t
, D
k
;R
k−1
, F
k−1
) (8)
The proposed specialized Faster R-CNN
framework is summarized in Algorithm 1.
Figure 3: Description of fine-tuning step for RPN.
Algorithm 1: Transfer learning for specialization.
Input: Generic network (R
0
, F
0
)
Number of iterations: K
Likelihood function: p(z|x)
Target video sequence : {I
(i)
}
I
i=1
Output: Final Specialized Faster R-CNN (R
K
, F
K
)
———————————-
for k=1,...,K do
/* Prediction step */
{
˜
x
(n)
k
}
˜
N
k
n=1
= Θ({I
(i)
}
I
i
i=1
;R
k−1
, F
k−1
)
/* Update step */
˜
π
(n)
k
= p(z
k
|x
k
=
˜
x
(n)
k
)
/* Fine-tuning step */
{R
k
, F
k
} = f (I
t
, D
k
;R
k−1
, F
k−1
)
end for
3.4 Likelihood Function
We put forward a likelihood function adapted from
(Ma
ˆ
amatou et al., 2016) that assigns a weight π
(n)
k
for each sample
˜
x
(n)
k
returned by the prediction step,
according to (9):
π
(n)
k
=
(
s
(n)
k
if s
(n)
k
≥ α
k
f
L
(
˜
x
(n)
k
) if s
(n)
k
< α
k
(9)
Where f
L
is an observation function proposed
by Maamatou et al.in (Ma
ˆ
amatou et al., 2016) and
modified to be adapted to our work. It assumes
that the pedestrians to be detected in the target
video sequence have to be moving objects. The
observation function uses visual contextual cues and
prior information extracted from the target video
sequence like background subtraction to select the
positive samples. The output of this function is a
set of weighted target samples that approximates the
posterior probability function.
α
k
is a score threshold that has to be fixed to 0.7
for our experiments and s
(n)
k
is the score generated by
the Faster R-CNN for each sample
˜
x
(n)
k
.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
20

4 EXPERIMENTS
In this section, we evaluate the effectiveness of the
proposed specialization framework with the relevant
methods on several popular datasets including MIT
(Wang et al., 2009) and CUHK (Wang et al., 2012)
datasets.
4.1 Datasets
The PASCAL VOC 2007 dataset (Everingham et al.,
2010) was utilized to learn the generic Faster. To do
this, we used 2,008 annotated pedestrians.
The evaluation was achieved on two public
datasets.
• CUHK Square dataset (Wang et al., 2012):
This is a video sequence of road traffic which
lasts 60 minutes. 352 images were used for
specialization, uniformly extracted from the first
half of the video. 100 images were utilized for
the test, extracted from the latest 30 minutes.
Annotations were provided by Wang (Wang et al.,
2012) for pedestrian detection (called CUHK
after). However, we have noticed that some
annotation errors were made in the public ground
truth and we have proposed a new annotation
(called CUHK M after).
• MIT Traffic dataset (Wang et al., 2009): This
is a 90-minute video. We used 420 images
from the first 45 minutes for specialization. 100
images were uniformly sampled from the last 45
minutes for the test. Annotations were available
for pedestrians (Wang et al., 2009) (called MIT).
4.2 Implementation Details
We describe the implementation details of the SMC
Faster R-CNN algorithm. The Faster R-CNN network
consists of two networks, the RPN network for
localization task and the Fast R-CNN network for
detection task. The two networks are initialized with
an ImageNet-pre-trained network (VGG16).
Following multiple experiments, we used the
following parameters: 9 as the number bounding
boxes (3 aspect ratios [2:1, 1:1, 1:2] and 3 scales
[128
2
, 256
2
, 512
2
] generated on each position of the
sliding windows, 0.7 as the threshold of IoU to select
the positive samples and 0.3 for the negatives to build
the training dataset. The parameter K (number of
iterations of the SMC process) is fixed to K = 2, the
specialization converges after two iterations on two
public datasets.
Table 1: Comparison of detection rate for pedestrian with
state of the art (at 0.5 FPPI).
Approach CUHK CUHK M MIT
Nair (2004) 0.24 – 0.35
Wang (2014) 0.45 – 0.42
Htike (2014) 0.49 – –
MAO (2015) 0.58 – –
Maamatou (2016) 0.62 0.58 0.40
Generic Faster 0.60 0.69 0.07
Our approach 0.63 0.80 0.44
Improvement/gen 6% 22% 564%
4.3 Evaluated Algorithms
Evaluation was performed in terms of recall False
Positives Per Image (FPPI) curves. The PASCAL 50
percent overlap criterion (Everingham et al., 2010)
was used to give a score for the pedestrian bounding
boxes. The SMC Faster R-CNN algorithm was
compared with several state-of-the-art algorithms:
• Generic Faster R-CNN: It is a detector fine-tuned
on the generic dataset. This is the baseline for our
comparison.
• Maamatou (2016) (Ma
ˆ
amatou et al., 2016): An
SMC framework was applied to specialize a
generic HOG-SVM for pedestrian detection.
• Mao (2015) (Yunxiang Mao, 2015): an algorithm
to automatically train scene-specific pedestrian
detectors based on tracklets.
• Htike (2014) (Htike and Hogg, 2014): a
non-iterative domain adaptation algorithm used to
specialize a pedestrian detector to video scenes.
• Wang (2014) (Wang et al., 2014): a specific-scene
detector trained on only relevant samples selected
from both source and target datasets.
• Nair (2004) (Nair and Clark, 2004): an iterative
self-training algorithm for detector adaptation
using background subtraction.
4.4 Results and Analysis
Given each dataset and its groud-truth, we give a
comparative synthetic table for pedestrian detection
(cf. Table 1). We compare the true detection rate
for a constant false positive per image detection rate
of several methods related to several datasets and
annotations. Moreover, on the last line of table 1,
the improvement between the generic Faster R-CNN
pedestrian detector and the SMC Faster R-CNN is
given.
The SMC Faster R-CNN has a higher detection
rate than the generic Faster R-CNN in all the
Specialization of a Generic Pedestrian Detector to a Specific Traffic Scene by the Sequential Monte-Carlo Filter and the Faster R-CNN
21

(a)
(b)
Figure 4: (a), (b): improvement of our proposed specialized
framework (the left images shows the detection results for
the generic detector and the right for the specialized one) in
CUHK and MIT datasets.
experiments (Fig.4). The median improvement is
22%.
For the CUHK pedestrian detection, the
SMC Faster R-CNN outperforms all the other
state-of-the-art algorithms. Besides, the detection
rate achieved with our annotations is nearly 80% for
0.5 FPPI.
For the MIT pedestrian detection, the SMC Faster
R-CNN is ranked first.
5 CONCLUSIONS
In this paper, we have proposed a specialization
framework for pedestrian detection based on
the sequential Monte Carlo filter and the Faster
R-CNN deep model. Given a generic pedestrian
detector and a target video sequence, our method
automatically provides a specialized detector.
Moreover, the experimental results show that the
algorithm outperforms the generic detector and the
state-of-the-art specialization approaches on two
challenging datasets. Our future works will deal with
an extension of the algorithm to a multi-traffic object.
ACKNOWLEDGEMENTS
This work is within the scope of a co-guardianship
between the university of Sousse (Tunisia) and Blaise
Pascal University (France). It is sponsored by the
Tunisian Ministry of Higher Education & Scientific
Research.
REFERENCES
Duan, L., Tsang, I. W., Xu, D., and Maybank, S. J. (2009).
Domain transfer svm for video concept detection. In
CVPR, pages 1375–1381. IEEE.
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. IJCV.
Glorot, X., Bordes, A., and Bengio, Y. (2011). Domain
adaptation for large-scale sentiment classification:
A deep learning approach. In Proceedings of the
28th International Conference on Machine Learning
(ICML-11), pages 513–520.
Goodfellow, I. J., Courville, A., and Bengio, Y. (2012).
Spike-and-slab sparse coding for unsupervised feature
discovery. arXiv.
Guyon, I., Dror, G., Lemaire, V., Taylor, G., and Aha, D. W.
(2011). Unsupervised and transfer learning challenge.
In IJCNN, pages 793–800. IEEE.
Htike, K. K. and Hogg, D. C. (2014). Efficient non-iterative
domain adaptation of pedestrian detectors to video
scenes. In 2014 22nd International Conference on
Pattern Recognition (ICPR), pages 654–659. IEEE.
Huang, G. B., Lee, H., and Learned-Miller, E.
(2012). Learning hierarchical representations for face
verification with convolutional deep belief networks.
In CVPR, pages 2518–2525. IEEE.
Jia, Y., Shelhamer, E., Donahue, J., Karayev, S., Long,
J., Girshick, R., Guadarrama, S., and Darrell, T.
(2014). Caffe: Convolutional architecture for fast
feature embedding. In ACM, pages 675–678. ACM.
LeCun, Y., Bottou, L., Bengio, Y., and Haffner, P.
(1998). Gradient-based learning applied to document
recognition. Proceedings of the IEEE, pages
2278–2324.
Li, X., Ye, M., Fu, M., Xu, P., and Li, T. (2015). Domain
adaption of vehicle detector based on convolutional
neural networks. International Journal of Control,
Automation and Systems, pages 1020–1031.
Ma
ˆ
amatou, H., Chateau, T., Gazzah, S., Goyat, Y., and
Essoukri Ben Amara, N. (2016). Transductive transfer
learning to specialize a generic classifier towards a
specific scene. In VISAPP, pages 411–422.
Mesnil, G., Dauphin, Y., Glorot, X., Rifai, S., Bengio, Y.,
Goodfellow, I. J., Lavoie, E., Muller, X., Desjardins,
G., Warde-Farley, D., et al. (2012). Unsupervised and
transfer learning challenge: a deep learning approach.
ICML Unsupervised and Transfer Learning, pages
97–110.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
22

Nair, V. and Clark, J. J. (2004). An unsupervised, online
learning framework for moving object detection. In
CVPR, pages II–317. IEEE.
Ren, S., He, K., Girshick, R. B., and Sun, J. (2015).
Faster R-CNN: towards real-time object detection
with region proposal networks. CoRR.
Simonyan, K. and Zisserman, A. (2014). Very
deep convolutional networks for large-scale image
recognition. arXiv preprint arXiv:1409.1556.
Smith, A., Doucet, A., de Freitas, N., and Gordon, N.
(2013). Sequential Monte Carlo methods in practice.
Springer Science & Business Media.
Taigman, Y., Yang, M., Ranzato, M. A., and Wolf, L.
(2014). Deepface: Closing the gap to human-level
performance in face verification. In CVPR, pages
1701–1708.
Wang, M., Li, W., and Wang, X. (2012). Transferring a
generic pedestrian detector towards specific scenes. In
CVPR, pages 3274–3281. IEEE.
Wang, X., Ma, X., and Grimson, W. E. L. (2009).
Unsupervised activity perception in crowded and
complicated scenes using hierarchical bayesian
models. PAMI, pages 539–555.
Wang, X., Wang, M., and Li, W. (2014). Scene-specific
pedestrian detection for static video surveillance.
PAMI, pages 361–362.
Will Y. Zou, Serena Y. Yeung, A. Y. N. (2011). Learning
hierarchical invariant spatio-temporal features for
action recognition with independent subspace
analysis. In CSD, pages 3361–3368.
Yunxiang Mao, Z. Y. (2015). Training a scene-specific
pedestrian detector using tracklets. pages 170–176.
Zeng, X., Ouyang, W., Wang, M., and Wang, X.
(2014). Deep learning of scene-specific classifier
for pedestrian detection. In ECCV, pages 472–487.
Springer.
Specialization of a Generic Pedestrian Detector to a Specific Traffic Scene by the Sequential Monte-Carlo Filter and the Faster R-CNN
23
