
Making and Understanding
A Vision for IoT Makerspaces
Julian Dax and Volkmar Pipek
Institute for Information Systems, University of Siegen, Siegen, Germany
Keywords: Making, IoT, Embedded Devices, End-User Development, End-User Software Engineering, Infrastructuring.
Abstract: We present a vision for the IoT makerspace of the future. Currently, makers design their spaces with a focus
on building (or making), but the core challenge they face in the IoT era is understanding. In our vision this is
archived by gathering data about the IoT devices and their environment, storing that data in a central
repository, consolidating it and making it easily accessible. We also describe the first steps we took towards
this vision.
1 INTRODUCTION
Consider the following scenario: Alice is building a
small robot in her local makerspace, which
automatically drives towards the nearest light source.
Two weeks ago, she almost got it working: It could
follow a light source, but the wheels don’t work well
on smooth surfaces. Now, that Alice has time again,
she wants to fix that. After she puts it on the big
working table in the hackspace and shines towards it
using her flashlight it does not move one bit. She is
puzzled and asks herself what she did do differently
this time.
Problems like these are quite common and
illustrate several concrete challenges makers face
every day. Software-controlled devices like the robot
behave in complex ways. Understanding the behavior
of a robot is therefore very challenging. As an IoT
device, is does not only have internal complexity; it
also reacts to the environment. In the robot's case, this
environment comprises its light sensors. In IoT in
general, it can be all kinds of sensors and also the
network. With IoT, the challenge is not building
anymore - the challenge is understanding the
behavior of the things you are building.
In this position paper, we present a vision of the
IoT makerspace (IoTMS) of the future, where the
IoTMS itself is an infrastructure which provides tools
for understanding. Concretely this means that:
The IoTMS captures and stores sensor data
automatically.
The IoTMS allows Makers to run simulations of
the developed IoT devices.
The IoTMS supports data analysis, retrieval, and
sharing.
We will also describe the first steps we took to arrive
at such a future by implementing a prototype
application.
2 REQUIREMENTS FOR AN IoT
MAKERSPACE
Back to Alice’s robot problem: After two hours of
checking the cables, debugging the source code and
replacing the motor she realizes, that when she last
worked on her project it was a Tuesday evening, and
now it is a Sunday afternoon. The lighting conditions
changed, and her algorithm has to change with them.
After some trial and error and a lot of recompilation,
she finds a setting for the light sensors which works
in the afternoon sun.
How can Alice be supported in understanding
what her robot does? At a very basic level, it is a
matter of gathering data. All sensor input and network
traffic should be directly visible to her. In general, we
derive requirement R1 from this:
The current state of the IoT device and its
environment should be visible to makers at all
times.
Fulfilling this requirement will help Alice see
previously hidden information which her robot
314
Dax, J. and Pipek, V.
Making and Understanding - A Vision for IoT Makerspaces.
DOI: 10.5220/0006094603140317
In Proceedings of the 8th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2016) - Volume 3: KMIS, pages 314-317
ISBN: 978-989-758-203-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reser ved
depends on. In this case, making visible the
previously invisible light sensor reading will help her
realize, that she needs to change her algorithm to
reflect the different input values. This will help with
many problems in the makerspace. However, Alice's
predicament is an exceptionally complicated one. She
can only solve it by also taking into account data from
her last visit to the space because if she adopts her
algorithm now to working in the afternoon, she also
wants to know which light sensor readings were taken
in the evening or her algorithm will not operate under
all circumstances. Abstractly, we derive requirement
R2 from this:
The past states of the IoT device and its
environment should be visible to makers at all
times.
Even if she could see the state of her robot and its
environment in past and the present, Alice would still
have a problem: She cannot test, if her updated
algorithm would work in the dark or if she just broke
it for that use-case. What would the robot do, if there
would be different lighting conditions? This question
can be addressed by allowing the simulation of
different scenarios.
We derive Requirement R3 from this:
Makers should be able to simulate environment
and device state parameters.
After she had finished her robot, Alice moved to
another city. Half a year later, Bob is interested in
building his own light-following robot. During the
project, he runs into the same problems Alice faced
before. However, he is not aware that someone in the
same makerspace built the same project as he does.
From this, we derive two requirements, R4 and R5.
Firstly, Alice should be supported in capturing
knowledge and secondly, Bob should be supported in
retrieving it:
IoTMS should help makers proactively when
they run into problems by providing information
relevant to the current context.
Makerspaces should support makers in
reviewing the gathered data and procure material
for future reference from it.
3 THE VISION
We envision an integrated hard- and software system,
which is distributed throughout and also an integral
part of the makerspace. We also see the IoTMS as one
holistic system. It is an infrastructure which provides
tools for building and understanding IoT devices.
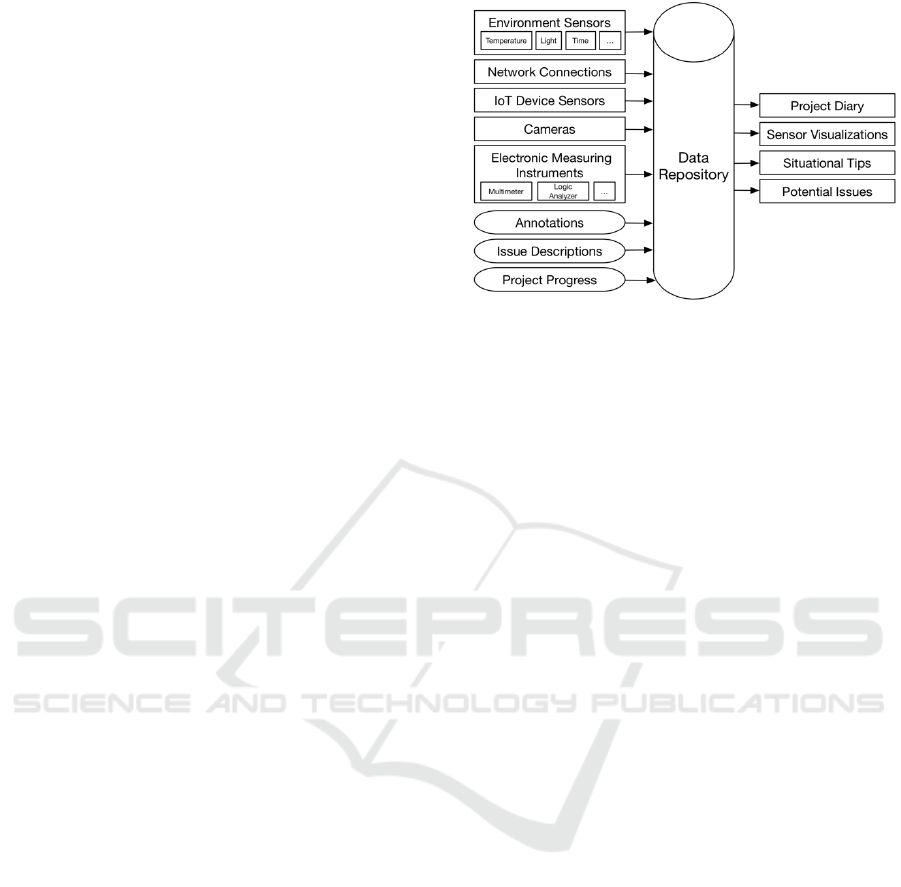
Figure 1: Overview of the data-flow through the IoTMS.
To address R1, it builds on connected sensors. For
electronics, this can be standard tools like
oscilloscopes and multimeters which transmit their
readings to a central data repository. Equally
important is reusing the already existing sensors in
IoT devices. In the robot example, the robot should
not only use the light sensor internally; it should send
all gathered data to the repository as well. Moreover,
we envision that computer vision technology can
automatically identify electronic components, like
resistors or diodes. After the sensors capture the data,
the system visualizes it. For that makers can use their
own laptops but the space also comes with projectors
or big screens. Makers should be able to visualize the
data by picking from a set of pre-defined
visualizations. The data repository and data
visualization also address requirement R2. A modern
time series database which allows quick access to all
captured information would allow makers to search
for past sensor data. To allow the simulations
described in R3, the software running on the IoT
device under development would also have to run in
the simulator. For that, the system should emulate or
simulate the microcontroller used in the IoT device.
Lastly, there would be a system for annotating the
captured data with the current project (for example
"Building a light-following robot"), project progress
and issues the maker faced. This way, a lab diary is
automatically generated. This diary can help makers
who do the same or similar projects in the future. For
this, we envision a context-dependent ambient
learning system which assists makers with their
concrete problem. The system could analyze current
sensor- and metadata data and automatically find
similar situations in the past using clustering
algorithms. Based on these past situations, the system
could then provide the maker with tips and point out
possible issues.
Making and Understanding - A Vision for IoT Makerspaces
315

4 FIRST STEPS TAKEN
As a first step towards the vision just described, we
implemented a desktop application called ‘Remotino’
(Dax et al., 2016) using web technologies (Electron,
Redux, React) which allows makers to remotely
control and instrument Arduino microcontrollers.
As shown in figure 2, Remotino allows makers to
visualize analog and digital inputs to the
microcontroller. Data from the Arduino is transferred
via USB to the desktop application using the Firmata
protocol (Steiner, 2009) . The main aim of the app is
to make the current state of the Arduino visible to the
user (R1).
Figure 2: A screenshot of the Remotino tool, showing
several analog inp ut pins and visualizing one of them.
It also provides some information about the past
state of the Arduino (R2), as the visualization uses a
sliding time window of one minute. Besides the input
visualization, Remotino also shows all available pins
and which modes these pins support (digital in, digital
out, analog in, analog out). It also recognizes which
kind of Arduino is connected. All these features aim
to make information visible and understandable
which was previously invisible.
Remotino is a first step towards the IoTMS and
currently only implements some of the aspects of a
IoTMS for a single maker. It only runs locally on a
PC and does not connect to a central repository (like
described in figure 1). It also only works with the
Arduinos it is directly connected to via USB. To
address these issues and develop it into the basis of an
IoTMS we are currently working on the first version
of the central data repository described above and on
an integration between this repository and Remotino.
Figure 3: A screenshot of the Remotino tool, showing
the two Arduinos which are automatically detected
when plugging them into the PC.
5 RELATED WORK
In our work, we draw on three research areas:
Making, Infrastructuring and End-User-Development
(EUD) (Ko et al., n.d.; Lieberman et al., 2006).
In the making and personal fabrication area,
Sheridan et al. describe and analyze current practices
in three makerspaces (Sheridan et al., 2014). Mellis
and Buechley studied DIY-communities with a focus
on online communities and electronic products. They
emphasize the need for “new Forms of knowledge
transfer" and find that in online communities about
DIY electronics text-based communication in a
question-and-answer format is very common but
ineffective (Mellis and Buechley, 2012).
In EUD, there has recently been more interest in
the development of physical objects and making.
Booth et al. identified challenges, which makers face
when building IoT devices (Booth et al., n.d.).
In infrastructure research (Star and Ruhleder,
1996) there has been interest in how to design
infrastructures, which help people in the
appropriation of technology (Ludwig et al., 2014).
We see the IoTMS as an infrastructure for
collaboratively understanding and building IoT.
KITA 2016 - 2nd International Workshop on the design, development and use of Knowledge IT Artifacts in professional communities and
aggregations. Knowledge Artifacts as resources in the maker and DIY communities
316

REFERENCES
Booth, T., Stumpf, S., Bird, J., Jones, S., n.d. Crossed
Wires: Investigating the Problems of End-User
Developers in a Physical Computing Task. ACM, New
York, New York, USA.
Dax, J., Ludwig, T., Pipek, V., 2016. Remotino: Supporting
End-User Developers in Prototyping Embedded
Devices CEUR Workshop Proceedings, Bari, Italy, pp.
7–11.
Ko, A. J., Abraham, R., Beckwith, L., Blackwell, A.,
Burnett, M., Erwig, M., Scaffidi, C., Lawrance, J.,
Lieberman, H., Myers, B., Rosson, M., Rothermel, G.,
Shaw, M., Wiedenbeck, S., n.d. ACM Computing
Surveys (CSUR) 43, 21–44.
Lieberman, H., Paternò, F., Klann, M., Wulf, V., 2006.
End-User Development: An Emerging Paradigm, in:
Lieberman, H., Paternò, F., Klann, M., Wulf, V. (Eds.),
Springer Netherlands, Dordrecht, pp. 1–8.
Ludwig, T., Stickel, O., Boden, A., Pipek, V., 2014.
Towards sociable technologies: an empirical study on
designing appropriation infrastructures for 3D printing.
ACM.
Mellis, D., Buechley, L., 2012. . Journal of the Designing
Interactive Systems Conference.
Sheridan, K., Halverson, E., Litts, B., Brahms, L., Jacobs-
Priebe, L., Owens, T., 2014. . Harvard Educ Rev 84,
505–531.
Star, S., Ruhleder, K., 1996. . Information Systems
Research 7, 111–134.
Steiner, H.-C., 2009. Firmata: Towards Making
Microcontrollers Act Like Extensions of the Computer.
pp. 125–103.
Making and Understanding - A Vision for IoT Makerspaces
317
