
Bridging the Reality Gap — A Dual Simulator Approach to the
Evolution of Whole-Body Motion for the Nao Humanoid Robot
Malachy Eaton
Dept. Computer Science and Information Systems, University of Limerick, Limerick, Ireland
Keywords: Evolutionary Algorithms, Humanoid Robotics, Ball Kicking, Evolutionary Robotics, Evolutionary Humanoid
Robotics, Whole-Body-Motion.
Abstract: We describe a novel approach to the evolution of whole-body behaviours in the Nao humanoid robot using a
multi-simulator approach to the alleviation of the reality gap issue. The initial evolutionary process takes
place in the V-REP simulator. Once a viable whole-body motion has been evolved, this evolved motion is
subsequently transferred for testing onto another simulation platform – Webots. Only when the evolved
kicking behaviour has been demonstrated to also be viable on the Webots platform is this behaviour then
transferred onto the real Nao robot for testing. This eliminates the time-consuming process of transferring
behaviours onto the real robot which have little chance of successfully crossing the reality gap, and also
minimises the potential for damage to the real Nao robot and/or it’s environment. By using this novel
approach of employing two different simulators, each with its own individual strengths and weaknesses, we
reduce the likelihood that any individual behaviour will be able to exploit individual simulators’ weaknesses,
as the other simulator should pick up on this weak point. Using this procedure we have successfully evolved
ball kicking behaviour in simulation, which has transferred with reasonable fidelity onto to the real Nao
humanoid.
1 INTRODUCTION
The field of humanoid robotics addresses the creation
of mobile robots that are broadly humanlike in their
gross anatomy and/or aspects of their behaviour.
Humanoid robots have several advantages, not least
of which is their potential ability to operate in
environments designed for humans, thus potentially
having the ability to handle tasks that may be time-
consuming, distasteful, or even dangerous for humans
to perform (Eaton, 2015).
A robot in common use today by researchers into
human-like behaviours is the Nao humanoid robot
from Aldebaran Robotics (Gouaillier et al., 2009).
This robot has up to 25 degrees of freedom and stands
58cm tall. A version of this robot is used in the
RoboCup Standard Platform League (SPL), with the
eventual avowed aim of producing, by the year 2050
a humanoid robot team that will be able to take on
(and beat) the current human World Cup champions
(Kitano and Asada, 1998) (Kitano et al., 1998).
Central, of course, to being able to take up this
challenge is the development of an effective kicking
action, which is the area we address in this paper.
While some work has been done to date on the
automatic generation of kicking motions through
parameter optimisation or other means (e.g.
(Jouandeau and Hugel, 2014) ,(Li et al., 2015)), little
work has been done on the direct evolution of
individual joint motions for the robot, which is the
approach we take. In general the field of evolutionary
robotics seeks to evolve some, or all aspects of a
robots controller and/or morphology (Nolfi and
Floreano, 2000), (Bongard, 2013).
Much of the work in the area of generating soccer-
centric skills has involved simulated robots for the
RoboCup3D simulation league (Depinet et al., 2014),
however our emphasis is on the evolution of
behaviours which can be transferred effectively onto
the real robot.
1.1 The “Reality Gap” Issue
A major issue that arises in this regard is the so-called
“reality gap”; that is the potential disparity between
evolved (or otherwise generated) behaviours in
simulation, and their actual implementation on the
real robot. This can be of particular importance in the
186
Eaton, M.
Bridging the Reality Gap — A Dual Simulator Approach to the Evolution of Whole-Body Motion for the Nao Humanoid Robot.
DOI: 10.5220/0006052301860192
In Proceedings of the 8th International Joint Conference on Computational Intelligence (IJCCI 2016) - Volume 1: ECTA, pages 186-192
ISBN: 978-989-758-201-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

evolution of behaviours for multi-jointed robots with
many degrees of freedom, as in the case discussed in
this paper. Various approaches have been taken to
alleviate this issue, including the transferability
approach (Koos et al., 2013), the grounded simulated
learning approach (Farchy et al., 2013), the
leveraging multiple simulators approach (Boeing and
Bräunl, 2012), combining evolution in simulation
with pre-programmed behaviours (Duarte et al.,
2012), using an EA to tune the parameters of a
simulator (Laue and Hebbel, 2009), fitness function
correction interleaving simulated and real data
(Iocchi et al., 2007), coevolution of controller and
simulator (Lipson et al., 2006), (Bongard and Lipson,
2004), the “back to reality approach” (Zagal and
Ruiz-Del-Solar, 2007), (Zagal et al., 2004), the online
adaptation approach (Floreano and Urzelai, 2001),
the envelope of noise approach (Jakobi, 1997a),
(Jakobi, 1997b), and scaled experimentation (Eaton,
2015).
Although there has been work done to date on
leveraging the effects of multiple physics simulators
(Boeing and Bräunl, 2012), (Boeing, 2009) for
evolutionary robotics experiments, to our knowledge
this is one of the few, if any, which utilises the
advantages of using multiple simulation packages,
rather than just the core physics engines.
1.2 Simulators used — Webots and
V-REP
The two simulation packages we use are Webots
(Michel, 2004) and the Virtual Robot
Experimentation Platform (V-REP) (Freese, 2010).
Both of these packages have been used extensively in
the simulation of a wide variety of robots including
wheeled and legged robots of a variety of types, and
also for the simulation of humanoid robots. Webots,
which in original form dates from 1996, is one of the
longest running simulators in continuous
development suited for the detailed simulation of
complex robotic environments. V-REP is a more
recent arrival dating from around the start of this
decade, and which describes itself as the Swiss army
knife among robot simulators; an example scene from
the V-REP simulator is given in Fig. 1. Regarding
physics engines Webots relies on the Open Dynamics
Engine (ODE), while V-REP provides a choice of 4
engines, ODE, the Bullet physics library, the Vortex
Dynamics Engine and the Newton Dynamics engine.
For the work described here we utilise the Bullet
physics engine.
1.3 Overall Approach
Our approach, then, is to run the evolutionary
experiments on a simulated Nao robot in the V-REP
package, and then to transfer successfully evolved
controllers into the Webots environment for further
testing and validation of their overall performance.
One advantage of our approach is that it is
unlikely that simulation weaknesses that would
manifest themselves on one simulator would occur on
the other , and vice versa. Another advantage of our
approach is that while Webots is a proprietary
simulation package, a fully functional version of V-
REP is freely available for non-commercial use. We
have observed through experimentation that a
significant proportion of behaviours evolved using
the V-REP platform do not transfer successfully to
the real Nao robot. As the process of transferral to the
real robot can be quite time-consuming , and as the
potential for damage to the robot and/or its
environment on execution of an incorrectly evolved
motion involving quite rapid whole-body motion
such as kicking is nontrivial, it is highly desirable
only to transfer motions to the real Nao robot which
have a high probability of success.
We have observed that it is very unlikely that a
behaviour evolved in V-REP, but that fails to operate
successfully in Webots will transfer onto the real
robot with any degree of fidelity, however if validated
in the Webots simulator a high percentage should
transfer with reasonable accuracy. Preliminary
experimental verification of this observation is
discussed in section 3.
Another advantage is that while similar models of
the Nao robot are used in each simulator, there are
certain differences. For example, it is known that
certain problems exist in the precise positioning of the
centre of mass (COM) of some parts of the simulated
Nao in V-REP. Again, by using multiple simulators
the expectation is that exactly similar problems will
not exist in all simulators.
While the work in (Boeing and Bräunl, 2012),
(Boeing, 2009) involved a parallel evolutionary
process, with each individual being tested in parallel
on several physics simulators, and the results
obtained from the evaluations being combined to
generate an overall fitness for the individual, we
employ a serial evolutionary process, with each
individual in a generation being evaluated initially on
the V-REP simulator as part of the evolutionary
process. Only successful individuals are then
transferred to the Webots simulator for validation of
their performance before being then transferred to the
real robot.
Bridging the Reality Gap — A Dual Simulator Approach to the Evolution of Whole-Body Motion for the Nao Humanoid Robot
187
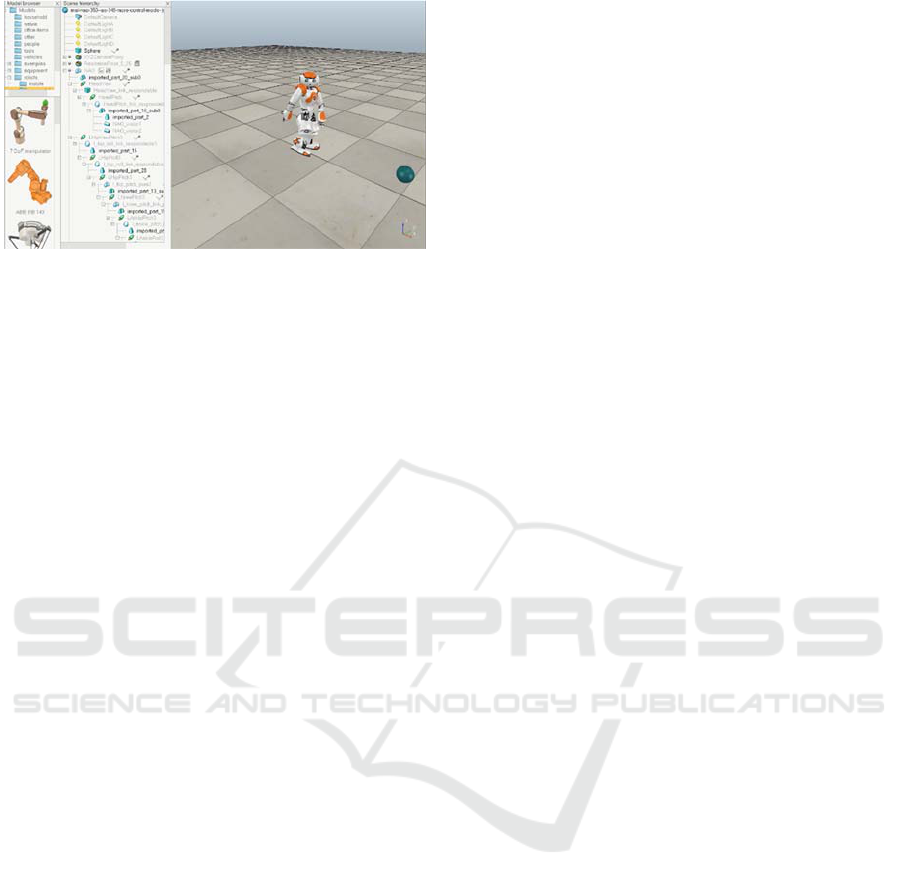
Figure 1: An example scene from the V-REP simulator. On
the far left are examples of some of the robots that can be
simulated, next to this is the scene hierarchy for the current
scene, on the right is an example of an evolved kick.
2 FITNESS FUNCTION
For the evolution of ball-kicking behaviour we base
our fitness function f on the distance travelled by the
ball in the forward direction in the time allowed for
each evaluation cycle. If the robot falls over mid-
cycle we base the fitness on the distance travelled by
the ball until the robot falls. This is to encourage
stable and replicable kicking motions which should
not cause undue strain to the real robot when
transferred from simulation. So, if the robot fails to
move the ball in the forward direction in the period in
which it remains upright, or the time limit (T) expires,
the fitness function is simply
f=100*t (1)
where t is the time that the robot remains upright
(t=T if the robot does not fall in the experimentation
period). T is set at 5 seconds for all the experiments
described here. If the robot does manage to move the
ball some distance in the forward direction the fitness
is then given by
f=(1+d)*100*t (2)
where d is the distance travelled by the ball. This
fitness function is designed in order to reward both
the robot remaining upright, and the ball being moved
in the forward direction. We note, of course, that no
constraint of remaining upright is placed on human
soccer players, it may indeed even be advantageous
to a player to conclude a kicking motion on the
ground in certain circumstances. The ball used in
these experiments was of roughly similar diameter to
that used in the RoboCup Standard Platform League
(SPL).
3 EXPERIMENTAL DETAILS
3.1 Genome Composition
The genome length is 416 bits in total. This comprises
4 bits per joint angle (allowing for a total of 16
different angle positions per joint) for each of the 24
modelled joints of the robot, for each of 4 keyframe
values. 4 keyframes were chosen as it was considered
that this would be a sufficient number to characterise
a complete kicking motion. While a certain amount
of a-priori knowledge was involved in this decision,
very little was specified about the joint values
associated with each keyframe, apart from the fact
that each joint has to keep within the maximum and
minimum ranges as given by the specifications for the
physical Nao robot. These maximum and minimum
ranges are then modified by the joint restriction
values evolved in each individual robots’ genome as
discussed below. Lower values of this 16-bit
parameter correspond to higher joint ranges.
Typically this parameter starts at quite a low value
early in the evolutionary process as the robot tends to
move in a “thrashing” fashion, which may, or may
not, cause ball movement. This value then increases
as the robot restricts its joint movement range in order
to increase the probability of not falling over due to
“thrashing” motions. As the evolution progresses this
value typically decreases gradually as the robot “frees
up” its joints in order to more effectively perform the
actions required (Eaton, 2007), (Eaton, 2013). As an
example of this progression, for the experiment
detailed in the next section the average value of this
parameter for the best genome of generation 1 was
2.41, rising to a maximum value of 3.91 in generation
124, and reducing gradually to a value of 3 in
generation 500.
A final 16 bits encodes movement durations for
each of the 4 keyframes.
3.2 Keyframe Interpolation
The interpolation between the keyframe values is
carried out by the V-REP and the Webots simulators
themselves using inbuilt functions within each
simulator. Once a sequence of 4 keyframes is
completed the process cycles over until the time limit
is exceeded or the run terminates for some other
reason (the robot falling over).
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
188
3.3 Evolutionary Algorithm and Robot
Control
The code for the evolutionary algorithm and robot
control software in the V-REP simulator is written in
the Lua programming language, while the
corresponding controller for the Webots simulator
and subsequent transfer to the real robot is written in
Python. This transferral is semi-automated at present,
however it is planned to fully automate this process
in the future.
A population size of 120 was used using a
mutation rate of 0.01 and a crossover probability of
0.2. These values were arrived at after some
experimentation. The genetic algorithm employs
tournament selection, and single-point crossover. It
also employs elitism, where the best individual of
each generation is guaranteed safe passage to the next
generation.
4 EXPERIMENTAL RESULTS
4.1 Evolution of Kicking Behaviour
Three runs over 500 generations were performed,
each taking about a day to complete on a 64-bit Dell
2.3GHz XPS 15 computer with an Intel i7 quad-core
CPU and 16GB of RAM. The results obtained were
then averaged to produce the fitness graph as shown
in Fig.2.
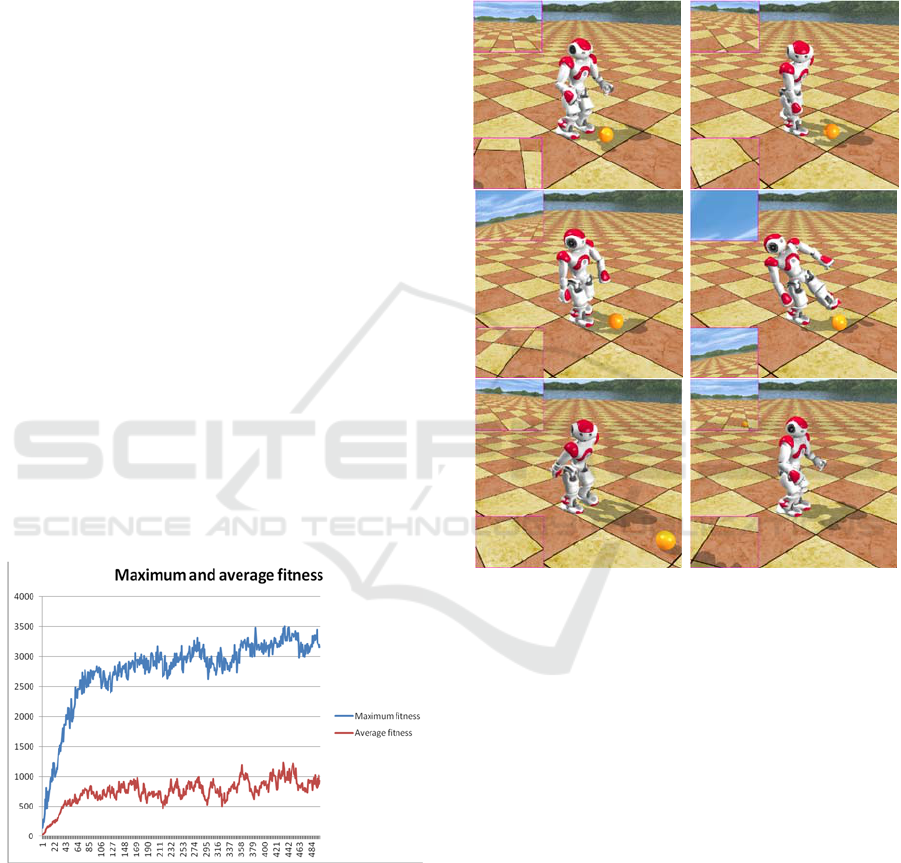
Figure 2: Maximum and average fitness, averaged over
three runs for 500 generations for the evolution of ball
kicking behaviour.
An effective kicking behaviour involves learning
to stand on one foot, and the maintenance of balance
on this foot while delivering a substantial blow to the
ball with the other foot. For our work we also wish
to maintain this balance (i.e. the robot does not fall
over on completion of the kicking motion), if
possible. Once the robot has learned to maintain its
balance its kicking efficiency (as measured by the
distance travelled by the ball) increases quite rapidly
up to about generation 100, with more modest gains
thereafter. Fig. 3 gives an example of an evolved kick
as modelled in the Webots simulator.
Figure 3: An example of an evolved kick, as transferred
from V-REP to the Webots simulator; read from top left to
bottom right.
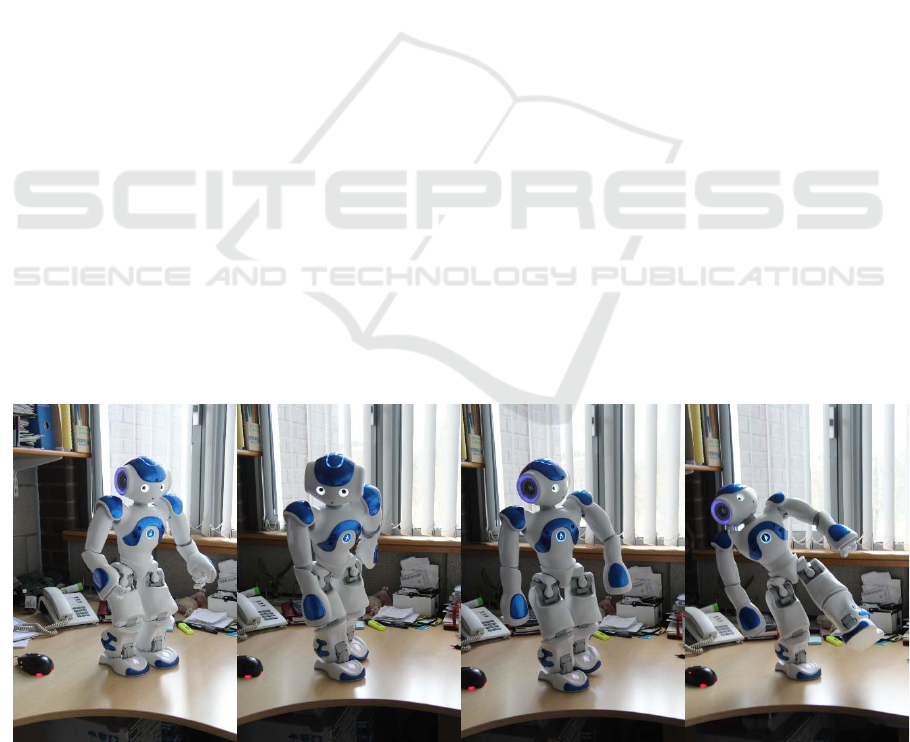
Fig. 4 then shows this kick as transferred to the
Nao humanoid robot using the procedure outlined
earlier. The main portion of this kicking motion
transfers directly onto the robot without need for
human intervention. The only minor point of
instability occurs in the final steadying motion before
the robot comes to rest on completion of the kick, we
conjecture that this is due to a friction mismatch
between the surface the real robot rests on, and the
values used in the V-REP and Webots simulators.
However the majority of the kicking behaviour
transferred directly to the robot resulting in an
effective and quite human-like striking action. The
entire behaviour sequence depicted in Fig.4 took
place without the need for human intervention.
Effective kicking behaviour evolved in all three
runs. In one of the runs predominately right-footed
kicks were evolved, whereas a left-footed kick, as
Bridging the Reality Gap — A Dual Simulator Approach to the Evolution of Whole-Body Motion for the Nao Humanoid Robot
189
demonstrated in Fig. 3 and Fig. 4, was evolved in the
other two runs, thus demonstrating the robustness and
flexibility of our approach.
It should be noted that tests conducted on the real
Nao robot were conducted at a reduced speed than the
V-REP and Webots environments to reduce the
likelihood of damage to the robot; it was also found
that a behaviour was more likely to transfer
successfully from simulated to real robot if conducted
at a lower speed. However this reduction of speed
was not, in general, found to cause a major diminution
in the effectiveness of the behaviours evolved.
4.2 Validation of Our Approach
As an additional preliminary test of the effectiveness
of our approach we chose 10 genomes at random from
the first of the 3 runs. All of the fitness’s of the
evolved behaviours were the best of their generation
and were around the 3000 mark, corresponding to an
effective kick as evolved in the V-REP simulator.
Of these 10 behaviours two resulted in
consistently unstable behaviour over several
evaluations in the Webots environment. When
transferred to the real Nao humanoid unstable
motions also resulted, with the robot falling over and
having to be manually restrained to avoid damage to
the robot.
Of the remaining 8 motions three resulted in
motions in which the either the robot either fell over
in one of the Webots test evaluations, or, while not
falling over exhibited significant instability at some
point in the sequence. Of these three test runs, when
transferred to the real Nao robot, two resulted
instability (robot falling over), and one corresponded
to an effective kicking motion, however exhibiting
significant instability towards the end of the motion
sequence.
Five of the 10 motions tested in the Webots
simulator resulted in effective stable kicking motions.
Of these 5 motions when transferred to the real Nao,
all but one resulted in successful stable kicks.
Based on the results of these initial experiments
we would not now generally consider testing any
evolved motion on the real Nao robot that had not
been successful in both the V-REP and Webots
environments, to avoid potential strain on the Nao
robots’ actuators and/or actual damage to the robot or
its environs.
5 CONCLUSIONS
In this paper we have demonstrated the evolution of
kicking behaviour in the Nao humanoid robot. Using
a novel dual-simulator approach with a fitness
function based solely on the stability of the robot and
the distance travelled by the ball, effective kicking
behaviours were developed which were demonstrated
to transfer, with reasonable fidelity, to the real Nao
robot.
To our knowledge this is the first time a multi-
simulator approach to the evolution of robot
behaviours in the manner described in this paper.
Also to our knowledge this is one of the few, if not
the only, work which involves the evolution of
kicking behaviours for direct transferral to the real
Nao humanoid, rather than for use in the RoboCup
simulation environment.
Figure 4: The evolved kick from Fig.3 as transferred to the real Nao robot. Compare these whole-body motions with the first
four frames of Fig. 3.
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
190

We intend to extend the approach presented in this
paper to the evolution of further behaviours of a more
complex nature, including involving multiple robots.
ACKNOWLEDGEMENTS
My thanks to Jason Brownlee for his Lua GA
implementation which provided the inspiration for
our GA coding. My appreciation also to Norah Power
for her assistance in the experimental phase of this
work. Finally, also thanks to the reviewers of this
paper for their helpful and constructive comments.
REFERENCES
Boeing, A., 2009. Design of a Physics Abstraction Layer
for Improving the Validity of Evolved Robot Control
Simulations. Ph.D Dissertation, School of Electrical,
Electronic and Computer Engineering, The University
of Western Australia, WA, 2009.
Boeing, A., and Bräunl, T., 2012. Leveraging multiple
simulators for crossing the reality gap. In: Control
Automation Robotics and Vision (ICARCV), 2012 12th
International Conference on (pp. 1113–1119). IEEE.
Bongard, J. C. , 2013. Evolutionary robotics.
Communications of the ACM, 56(8), 74–83.
Bongard, J. C., and Lipson, H., 2004. Once more unto the
breach: Co-evolving a robot and its simulator. In:
Proceedings of the Ninth International Conference on
the Simulation and Synthesis of Living Systems
(ALIFE9) (pp. 57–62).
Depinet, M., MacAlpine, P., & Stone, P. ,2014. Keyframe
sampling, optimization, and behavior integration:
Towards long-distance kicking in the robocup 3d
simulation league. In RoboCup 2014: Robot World Cup
XVIII (pp. 571-582). Springer International Publishing.
Duarte, M., Oliveira, S., and Christensen, A. L., 2012.
Automatic synthesis of controllers for real robots based
on preprogrammed behaviors. In: From Animals to
Animats 12 (pp. 249–258). Springer Berlin Heidelberg.
Eaton, M., 2007. Evolutionary humanoid robotics: past,
present and future, In: 50 Years of Artificial
Intelligence: Essays Dedicated to the 50th Anniversary
of Artificial Intelligence LNAI 4850, Springer, pp. 42–
53.
Eaton, M., 2013. An Approach to the Synthesis of
Humanoid Robot Dance Using Non-interactive
Evolutionary Techniques. In: Systems, Man, and
Cybernetics (SMC), 2013 IEEE International
Conference on (pp. 3305–3309). IEEE.
Eaton, M., 2015. Evolutionary Humanoid Robotics.
Springer Berlin Heidelberg.
Farchy, A., Barrett, S., MacAlpine, P., and Stone, P., 2013.
Humanoid robots learning to walk faster: From the real
world to simulation and back. In: Proceedings of the
2013 international conference on Autonomous agents
and multi-agent systems (pp. 39–46). International
Foundation for Autonomous Agents and Multiagent
Systems.
Floreano, D., and Urzelai, J., 2001. Evolution of plastic
control networks. Autonomous robots, 11(3), 311–317.
Freese, M.S., Singh, S, Ozaki, F, and Matsuhira N., 2010.
Virtual robot experimentation platform v-rep: a
versatile 3d robot simulator. In Simulation, Modeling,
and Programming for Autonomous Robots, pages 51–
62. Springer, 2010.
Gouaillier, D., Hugel, V., Blazevic, P., Kilner, C.,
Monceaux, J., Lafourcade, P., Mariner, B., Serre, J., and
Maisonnier, B.,2009 . Mechatronic design of NAO
humanoid. In: Robotics and Automation, 2009. ICR’09.
IEEE International Conference on (pp. 769–774).
IEEE.
Iocchi, L., Libera, F. D., and Menegatti, E. , 2007. Learning
Humanoid soccer actions interleaving simul ated and
real data, in: Proc. of The Second Workshop on
Humanoid Soccer Robots, IEEE-RAS 7th International
Conference on Humanoid Robots, Pittsburgh, 2007
Jakobi, N. , 1997b. Half-baked, ad-hoc and noisy: minimal
simulations for evolutionary robotics. In: P. Husbands
and I. Harvey, Proceedings of the Fourth European
Conference on Artificial Life. Cambridge, MA: MIT
Press.
Jakobi, N., 1997a. Evolutionary robotics and the radical
envelope-of-noise hypothesis. Adaptive Behavior, 6(2),
325–368.
Jouandeau, N., & Hugel, V. ,2014. Optimization of
parametrised kicking motion for humanoid soccer
player. In Autonomous Robot Systems and
Competitions (ICARSC), 2014 IEEE International
Conference on (pp. 241-246). IEEE.
Kitano, H., and Asada, M.,1998. RoboCup humanoid
challenge: That's one small step for a robot, one giant
leap for mankind. In: Intelligent Robots and Systems,
1998. Proceedings, 1998 IEEE/RSJ International
Conference on (Vol. 1, pp. 419–424). IEEE.
Kitano, H., Asada, M., Kuniyoshi, Y., Noda, I., Osawai, E.,
and Matsubara, H., 1998. Robocup: A challenge
problem for AI and robotics. In: RoboCup-97: Robot
Soccer World Cup I (pp. 1–19). Springer Berlin
Heidelberg.
Koos, S., Mouret, J. B., and Doncieux, S..,2013. The
transferability approach: Crossing the reality gap in
evolutionary robotics. Evolutionary Computation,
IEEE Transactions on, 17(1), 122–145.
Laue, T., and Hebbel, M., 2009. Automatic parameter
optimization for a dynamic robot simulation. In:
RoboCup 2008: Robot Soccer World Cup XII (pp. 121–
132). Springer Berlin Heidelberg.
Li, X., Liang, Z., & Feng, H. ,2015. Kicking motion
planning of Nao robots based on CMA-ES. In Control
and Decision Conference (CCDC), 2015 27th Chinese
(pp. 6158-6161). IEEE.
Lipson, H., Bongard, J. C., Zykov, V., and Malone, E.,
2006. Evolutionary Robotics for Legged Machines:
From Simulation to Physical Reality. In: Arai, T. et al
Bridging the Reality Gap — A Dual Simulator Approach to the Evolution of Whole-Body Motion for the Nao Humanoid Robot
191

(eds.), Intelligent Autonomous Systems 9(IAS-9),
pp.11–18.
Michel, O., 2004. Webots: Professional Mobile Robot
Simulation. International Journal of Advanced Robotic
Systems, Vol. 1, No. 1, 39–42.
Nolfi, S., and Floreano, D.,2000. Evolutionary robotics.
The biology, intelligence, and technology of self-
organizing machines. MIT Press.
Zagal, J. C., and Ruiz-Del-Solar, J., 2007. Combining
simulation and reality in evolutionary robotics. Journal
of Intelligent and Robotic Systems, 50(1), 19–39.
Zagal, J. C., Ruiz-del-Solar, J., and Vallejos, P., 2004. Back
to reality: Crossing the reality gap in evolutionary
robotics. In: IAV 2004 the 5th IFAC Symposium on
Intelligent Autonomous Vehicles, Lisbon, Portugal.
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
192
