
Ranking the Performance of Compiled and Interpreted Languages in
Genetic Algorithms
Juan-Juli
´
an Merelo-Guerv
´
os
1
, Israel Blancas-
´
Alvarez
1
, Pedro A. Castillo
1
, Gustavo Romero
1
,
Pablo Garc
´
ıa-S
´
anchez
1
, Victor M. Rivas
2
, Mario Garc
´
ıa-Valdez
3
, Amaury Hern
´
andez-
´
Aguila
3
and Mario Rom
´
an
4
1
CITIC and Computer Architecture and Technology Department, University of Granada, Granada, Spain
2
Department of Computer Sciences, University of Ja
´
en, Ja
´
en, Spain
3
Tijuana Institute of Technology, Tijuana, Mexico
4
University of Granada, Granada, Spain
Keywords:
Benchmarking, Implementation of Evolutionary Algorithms, OneMax, Genetic Operators, Programming
Languages, Performance Measurements.
Abstract:
Despite the existence and popularity of many new and classical computer languages, the evolutionary algo-
rithm community has mostly exploited a few popular ones, avoiding them, especially if they are not compiled,
under the asumption that compiled languages are always faster than interpreted languages. Wide-ranging
performance analyses of implementation of evolutionary algorithms are usually focused on algorithmic im-
plementation details and data structures, but these are usually limited to specific languages. In this paper we
measure the execution speed of three common operations in genetic algorithms in many popular and emerging
computer languages using different data structures and implementation alternatives, with several objectives:
create a ranking for these operations, compare relative speeds taking into account different chromosome sizes
and data structures, and dispel or show evidence for several hypotheses that underlie most popular evolution-
ary algorithm libraries and applications. We find that there is indeed basis to consider compiled languages,
such as Java, faster in a general sense, but there are other languages, including interpreted ones, that can hold
its ground against them.
1 INTRODUCTION
In the same spirit of the No Free Lunch theorem
(Wolpert and Macready, 1997) we could consider
there is a no fast lunch (Merelo et al., 2015) hypoth-
esis for the implementation of evolutionary optimiza-
tion problems, in the sense that, while there are par-
ticular languages that might be the fastest for particu-
lar problem sizes and specially fitness functions there
is no single language that is the fastest for all chro-
mosome sizes, implementations and fitness functions.
But the main problem is that implementation deci-
sions, and in many occasions reviewer reports, are
based on common beliefs such as thinking that a par-
ticular language is the fastest or other language is too
slow to even being taken into consideration for imple-
menting evolutionary algorithms.
After initial tests on a smaller number of lan-
guages (Merelo et al., 2016) and three different data
structures, in this paper we add more languages, dif-
ferent data structures and also, in the case of lan-
guages with a particularly bad result, new implemen-
tations including some made using released evolu-
tionary algorithm libraries, and finally even found and
corrected some bugs.
To use the results we already had, we have re-used
the same operations: crossover, mutation and One-
Max. In general (Merelo-Guerv
´
os et al., 2011) an
Evolutionary Algorithm (EA) application will spend
the most time running the fitness function and others,
such as ranking the population; however, these are
well covered by several general purpose benchmarks
so they are not the focus of this paper. A priori, this
result would extend only to some implementations of
genetic algorithms. However, in this paper we would
like to present not only the result itself, which is in-
teresting, but also a methodology to first assess new
languages for implementing evolutionary algorithms
164
Merelo-Guervós, J., Blancas-Álvarez, I., Castillo, P., Romero, G., García-Sánchez, P., Rivas, V., García-Valdez, M., Hernández-Águila, A. and Román, M.
Ranking the Performance of Compiled and Interpreted Languages in Genetic Algorithms.
DOI: 10.5220/0006048101640170
In Proceedings of the 8th International Joint Conference on Computational Intelligence (IJCCI 2016) - Volume 1: ECTA, pages 164-170
ISBN: 978-989-758-201-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

for the value or insights they might give to the al-
gorithm mechanism, and second to make real-world
measures and benchmark them to test their speed and
performance relative to other common languages in-
stead of choosing usual languages based only on past
experience and common (maybe mis-) conceptions.
The rest of the paper is organized as follows: com-
ing up next in Section 2, we will present the state of
the art of the analysis of EA implementations. Next
we will present in Section 3 the tests we have used in
this paper and its rationale along with the languages
we have chosen for carrying them out. Finally, in Sec-
tion 4 we will present the results obtained. Finally, we
will draw the conclusions and present future lines of
work.
2 STATE OF THE ART
The first published benchmarks of evolutionary algo-
rithms (Jose Filho et al., 1994) focused on implemen-
tation details using C and C++; since then, there are
not many publications on the subject, until recently
when Alba et al. examined the performance of dif-
ferent data structures, all of them using the same lan-
guage, in (Alba et al., 2007). (Merelo-Guerv
´
os et al.,
2010) described the implementation of an evolution-
ary algorithm in Perl, also used in this paper, prov-
ing that, as a whole, Perl could run evolutionary al-
gorithms almost as fast as Java, but if we took into
consideration other factors like actual coding speed
measured by single lines of code, Perl was better.
Most papers, if not all, including this one, fo-
cus on single-threaded procedural environments; for
instance, a recent paper (Nesmachnow et al., 2015)
focuses on a single language, C++. In these cases
classical languages have a certain advantage. How-
ever, innovation has not only spawned new languages,
but also new architectures like the Kappa architecture
(Erb and Kargl, 2015), microservices (Namiot and
Sneps-Sneppe, 2014) or service-oriented frameworks
(Garc
´
ıa-S
´
anchez et al., 2010; Garc
´
ıa-S
´
anchez et al.,
2013) where we could envision that different parts of
an evolutionary algorithm might be written in differ-
ent languages, but also in new languages better suited
for certain tasks. The no fast lunch principle enunci-
ated above implies that different languages could be
used for distributed systems, with the fastest or most
appropriate language used for every part of it.
All in all, existing literature focuses either on a
single language and different data structures or dif-
ferent, and mainly popular, languages with a sin-
gle data structure. In previously published research
(Merelo et al., 2016) we focused on fewer languages
and mainly tried to measure their scaling behaviour
across different lengths, and we found that Java, C#
and C obtained the best results. However, we did not
attempt to rank languages or measure relative speeds
across all tests. This is what we do in this paper, ex-
tending the analysis of the previous paper with more
languages and implementations. Next we will explain
how the experiment was set up and the functions used
in it.
3 EXPERIMENTAL SETUP
We have used bitflip mutation, crossover and count-
ones or OneMax in this and the previous experiments,
mainly since they are the quintessential genetic algo-
rithm operators and a benchmark used in practical as
well as theoretical approaches to Genetic Algorithms
(GAs). In general, they exercise only a small part
of the language capabilities, involving mainly inte-
ger and memory-access performance through loops.
However, the implementation of these operations is
deceptively simple, specially for OneMax, a problem
frequently used in programming job interviews.
Loops are also a key component in performance.
Most languages allow for loops, however, many can
also perform map implicit loops where a function is
run over each component of a data structure, reducing
sequential or random access to arrays. When avail-
able, we have used these types of functions. This im-
plies that despite its simplicity, the results have wider
applicability, except for floating point performance,
which is not tested, mainly because it is a major com-
ponent of many fitness functions, not so much of the
evolutionary algorithm itself.
Chromosomes in EAs can be represented in sev-
eral different ways: an array or vector of Boolean val-
ues, or any other scalar value that can be assimilated
to it, or as a bitstring using generally “1” for true val-
ues or “0” for false values. Different data structures
will have an impact on the result, since the opera-
tions that are applied to them are, in many cases, com-
pletely different and thus the underlying implementa-
tion is more or less efficient. Besides, languages use
different native data structures to represent this infor-
mation. In general, it can be divided into three differ-
ent fields:
• Strings: representing a set bit by 1 and unset by 0,
it is a data structure present in all languages and
simple to use in most.
• Vector of Boolean values: not all languages have
a specific primitive type for the Boolean false and
true values; for those who have, sometimes they
Ranking the Performance of Compiled and Interpreted Languages in Genetic Algorithms
165

have specific implementations that make this data
structure the most efficient. In some and when
they boolean values were not available, 1 or 0
were used. Bitsets are a special case, using bits
packed into bytes for representing vector of bits,
with 32 bits packed into a single 4 byte data struc-
ture and bigger number of bytes used as needed.
• Lists are accessed only sequentially, although run-
ning loops over them might be more efficient that
using random-access methods such as the ones
above.
Besides, many languages, including functional
ones, differentiate between Mutable and Constant
data structures, with different internal representations
assigned to every one of them, and extensive opti-
mizations used in Immutable or constant data struc-
tures. Immutable data structures are mainly used in
functional languages, but some scripting languages
like Ruby or Python use it for strings too.
In this paper more than 20 languages, some of
them with several implementations, have been chosen
for performing all benchmarks; additionally, another
language, Rust, has been tested for one of them, and
Clojure using persistent vectors was tested only for
OneMax. This list includes 9 languages from the top
10 in the TIOBE index (TIOBE team, 2016), with Vi-
sual Basic the only one missing, and 1 more out of
the top 20 (or two if we include Octave instead of the
proprietary application Matlab). The list of languages
and alternative implementations is shown in Table 1.
When available, open source implementations of
the operators and OneMax were used. In all cases ex-
cept in Scala, implementation took less than one hour
and was inspired by the initial implementation made
in Perl or in Lua. In fact, we abandoned languages
such as AWK or FORTRAN when it took too long
to make a proper implementation in them. Adequate
data and control structures were used for running the
application, which applies mutation to a single gen-
erated chromosome a hundred thousand times. The
length of the mutated string starts at 16 and is doubled
until reaching 2
15
, that is, 32768. This upper length
was chosen to have an ample range, but also so small
as to be able to run the benchmarks within one hour.
Results are shown next. In some cases and when the
whole test took less than one hour, length was taken
up to 2
16
.
In most cases, and especially in the ones where
no implementation was readily available, we wrote
small programs with very little overhead that called
the functions directly. That means that using classes,
function-call chains, and other artifacts, will add an
overhead to the benchmark; besides, this implies that
the implementation is not exactly the same for all lan-
guages. However, this inequality reflects what would
be available for anyone implementing an evolutionary
algorithm and, when we think it might have an influ-
ence on the final result, we will note it.
Every program used also provides native capabil-
ities for measuring time, using system calls to check
the time before and after operations were performed.
These facilities used the maximum resolution avail-
able, which in some cases, namely Pascal, was some-
what inadequate.
All programs produced the same output, a comma
separated set of values that includes the language and
data structure used, operand length and time in sec-
onds.
4 RESULTS AND ANALYSIS
All the results have been made available in the repos-
itory that holds this paper as well as some of the
implementations, at https://git.io/bPPSN16. Imple-
mentation and results are available with a free li-
cense. The Linux system we have used for test-
ing runs the 3.13.0-34-generic #60-Ubuntu SMP
kernel on an Intel(R) Core(TM) i7-4770 CPU @
3.40GHz CPU. In this paper we will look mainly at
the aggregated results, comparing the differences in
order of magnitude between the different languages
and also how they compare to each other.
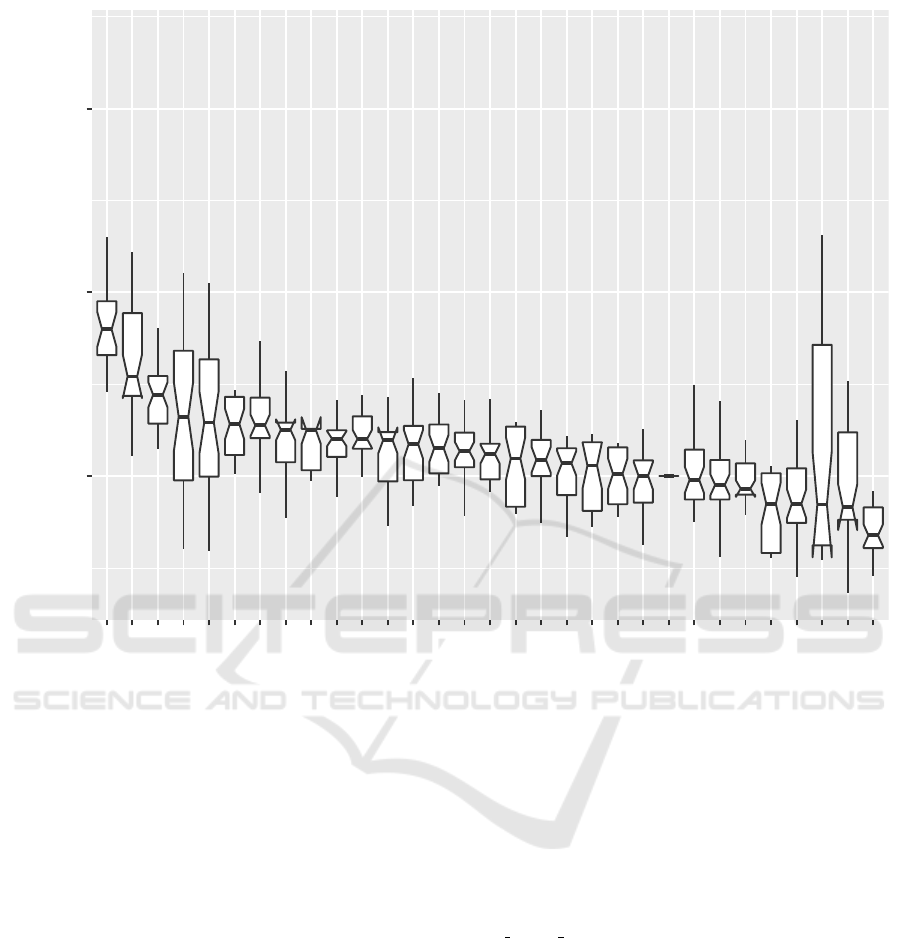
To have a general idea of performance and be able
to compare across benchmarks and sizes, we have
used the language Julia, whose performance is more
or less in the middle, as a baseline for comparison
and expressed all times as the ratio between the time
needed for a particular language and length and the
speed for Julia. Ratios higher than 1 mean that the
particular language+data structure is faster than Julia,
<1 the opposite. Please check the boxplot in Figure 1
for the average and standard deviation across all func-
tions and lengths, when the comparison is possible.
We should first refer to the remarkable perfor-
mance of Clojure using persistent vectors. Clojure
is a functional language, and immutable structures
lend themselves better to functional processing. Clo-
jure includes some specific functions for this kind of
counting. However, it should be noted that then we
could not run Clojure on the rest of the functions, bit-
flip and crossover.
Next comes Java, with a performance that is
around two orders of magnitude better than baseline.
In some cases, Clojure using mutable vectors can be
very fast too, but its overall performance takes it to
the third worst overall performance. This also implies
that simply choosing a language is not a guarantee of
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
166
Table 1: Languages, versions, URLs, data structure and type of language used to carry out the benchmarks. No special flags
were used for the interpreter or compiler.
Language Version URL Data structures Type
C 4.8.2 http://git.io/v8T57 Bit String Compiled
C++ 4.8.4 http://git.io/v8T57 Bit Vector Compiled
C# mono 4.2 https://git.io/vzHDI Bit Vector Compiled
Clojure 1.8.0 https://git.io/vzHDe Bit Vector Compiled
Common Lisp 0.13.7 https://git.io/vzHyR Simple Bit Vector Compiled
Go go1.2.1 http://git.io/vBSYp Bit Vector Compiled
Haskell ghc 7.10.3 https://git.io/vzHMw Mutable Vector Compiled
Java 1.8.0 66 http://git.io/v8TdR Bitset Compiled
JavaScript node.js 5.0.0 http://git.io/vBSYd String Interpreted
Julia 0.2.1 http://git.io/vBSOe Bit Vector Interpreted
Lua 5.2.3 http://git.io/vBSY7 String Interpreted
Octave 3.8.1 http://git.io/v8T57 BitVector Interpreted
PHP 5.5.9 http://git.io/v8k9g String Interpreted
Perl v5.20.0 http://git.io/bperl String, Bit Vector Interpreted
Python 2.7.3 http://git.io/vBSYb String Interpreted
Python 3 3.4.3 https://git.io/p3deap Bit Vector, List Interpreted
Rust 1.4.0 https://git.io/EOr Bit Vector Compiled
Scala 2.11.7 http://git.io/vBSYH String, Bit Vector Compiled
Ruby 1.9.3p551 https://git.io/rEO Bit Vector Interpreted
JRuby 9.0.5.0 (2.2.3) https://git.io/rEO Bit Vector Interpreted
Free Pascal 2.6.2-8 https://git.io/fpeo Bit Vector Compiled
Kotlin 1.0.1 https://git.io/kEO Bit Vector Compiled
Dart 1.15.0 https://git.io/dEO List Interpreted
performance; data structures chosen and implementa-
tion play also a major role.
The top 5 is completed with C#, Haskell and
Scala, this last using also a particular implementa-
tion, BitVector; if a more natural BitString is used,
its performance is on a par with the aforementioned
Clojure. Out of the top 5, three of them are functional
languages: Haskell, Clojure and Scala; Clojure is also
an interpreted language, with a JIT compiler that tar-
gets the Java Virtual Machine. Three of them also use
the Java Virtual Machine: Clojure, Java and Scala; C#
has its own runtime too, with Haskell having a com-
piler to native object code, being thus the only pure
compiled language in this set.
The biggest differences reside among the top 3
languages. Haskell, Scala, Go, C and Perl have a very
similar performance, and it should be remarked that
Perl is the first interpreted language in the list. Other
compiled languages, including C++, have worse per-
formance, and the worst 10 include several compiled
languages, as well as functional languages such as
clisp. Also Perl in a different implementation, show-
ing once again that a particular language, by itself,
need not be a guarantee of performance.
From the best to the worst implementation, there
are 4 orders of magnitude of difference. This can be
quite important because the range of running time be-
tween the slowest and the fastest can go from 1 second
to several hours. Languages such as Octave or clisp,
maybe even Python and Julia, should be avoided ex-
cept for problems with a size that allows them to be
run in a few seconds.
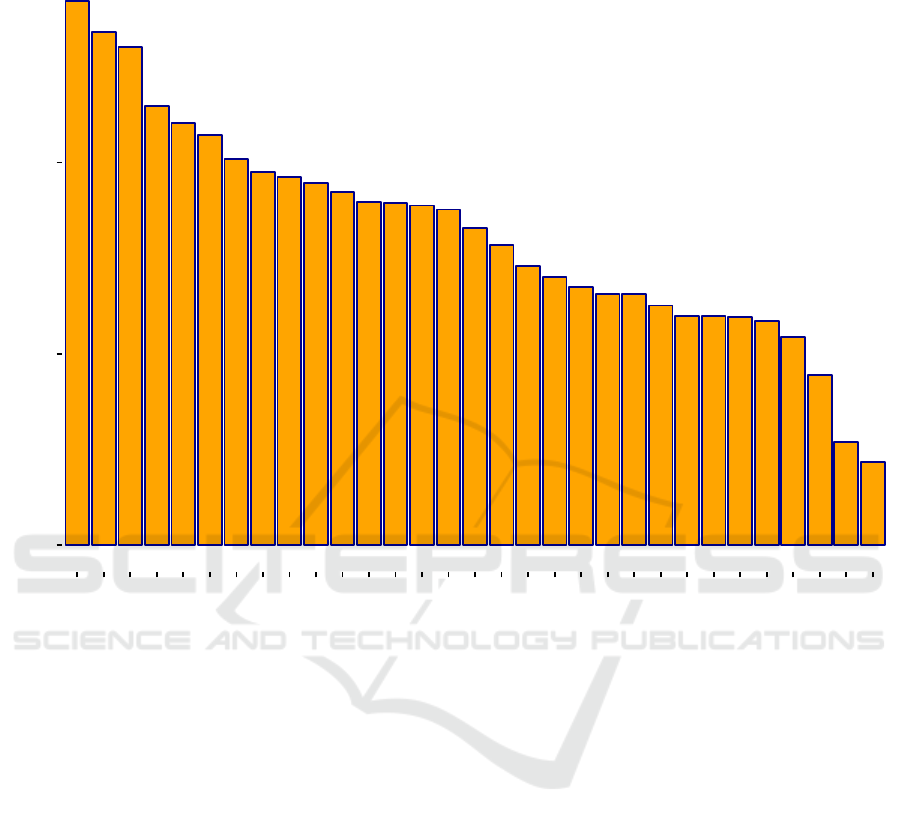
However, let us rank the languages looking at how
they fare, comparing with the other implementations.
The averaged ranking shown in Figure 2 averages the
position reached for all sizes and functions, and sub-
tracts it from the total number of languages tested,
so that bigger is better. Even if on average and con-
strained to OneMax Clojure is better than Java, this
language beats it more times than the contrary, so it
becomes first in the ranking. C also achieves a bet-
ter position than in the previous graph, and Perl a
worse position. Two emerging languages which have
been added for this paper, Kotlin and Dart, together
with JRuby, the implementation of Ruby for the JVM,
close the top 10 ranking. You need to look at this
averaged rankings as the probability that a particular
language is the best for a particular function and size.
Languages such as Pascal or Go are more likely to
win than JRuby or node. However, some groupings
can also be detected. The three best (Java, Clojure and
C#) form the first, with a second group of three, up to
Free Pascal, and then a gap to #7, which is Haskell.
The worst 10, in this case, include two compiled lan-
Ranking the Performance of Compiled and Interpreted Languages in Genetic Algorithms
167
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
1e+00
1e+04
1e+08
clojure−persistentvector
Java−BitSet
CSharp−BitVector
Haskell−BitVector
Scala−BitVector
Go−BitVector
C−BitString
perlsimple−BitString
perl5.20−BitString
Kotlin−BitVector
Pascal−BitVector
node−BitString
PHP−BitString
Dart−List
JRuby−BitVector
Ruby−BitVector
python−BitString
Rust−BitVector
lua−BitString
Python−BitString
Python_DEAP_numpy−BitVector
perl5.22−BitString
julia−BitString
clisp−BitVector
C++−BitString
Python_DEAP−List
perl−BitVector
Scala−BitString
clojure−BitVector
Octave−BitVector
perl−BitString
Language
Ratio
Figure 1: Boxplot of scaled performance compared to baseline Julia. Please note that y has a logarithmic scale. The strings
indicate the language and the implementation; for instance, Python DEAP numpy is a python implementation using the
operators in the DEAP framework (Fortin et al., 2012) and numpy implementation for vectors.
guages: C++ and Scala with a BitString implementa-
tion. The rest are all interpreted languages.
Another interesting result that can be observed in this
ranking is the domination of the Bit Vector structure
over the rest, bearing in mind that the BitSet used by
Java is actually a type of bit vector with a particular
implementation. The best bit string implementation
is C, followed by Perl, which is actually very close.
The best List implementation, by the Dart language
is in the middle region by performance and the 9th
by ranking. Let us discuss these findings in the next
section, together with the conclusions.
5 CONCLUSIONS
In this paper we have measured the performance of
an extensive collection of languages in simple and
common evolutionary algorithm operations: muta-
tion, crossover and OneMax, with the objective of
finding out which languages are faster at these opera-
tions and what are the actual differences across lan-
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
168
0
10
20
Java−BitSet
clojure−persistentvector
CSharp−BitVector
C−BitString
Go−BitVector
Pascal−BitVector
Haskell−BitVector
Kotlin−BitVector
Dart−List
JRuby−BitVector
PHP−BitString
node−BitString
perl5.20−BitString
Scala−BitVector
perlsimple−BitString
Ruby−BitVector
Rust−BitVector
clojure−BitVector
clisp−BitVector
lua−BitString
julia−BitString
C++−BitString
Python_DEAP_numpy−BitVector
perl5.22−BitString
Python−BitString
Octave−BitVector
Python_DEAP−List
Scala−BitString
python−BitString
perl−BitString
perl−BitVector
Language+Data Structure
30−average rank
Average rank
Figure 2: Ranking averaged across all measures, subtracted from the total number of measured languages, so bigger is better.
guages, language types and data structures, the main
objective being that the EA practitioner can use these
results to make decisions over which language or lan-
guages to use when implementing evolutionary lan-
guages.
We can conclude that the language usually con-
sidered the fastest among the practitioners, Java, in-
deed holds that position on average, although it can be
beaten by Clojure in some functions. Functional lan-
guages have a remarkable performance, despite their
lack of popularity in the EA community. Using vector
of bits rather than bit strings or lists provides, in gen-
eral, a better performance, and immutable data struc-
tures, such as the ones used in functional languages
can be accessed and used, in general, faster than mu-
table structures if available in the same language.
Future lines of work might include a more exten-
sive measurement of other operators such as tourna-
ment selection and other selection algorithms. A pri-
ori, these are essentially CPU integer operations and
their behavior might be, in principle, very similar to
the one shown in these operations. It would also be in-
teresting to mix and match different languages, choos-
ing every one for its performance, in a hybrid archi-
tecture. Communication might have some overhead,
but it might be offset by performance. Combining
Ranking the Performance of Compiled and Interpreted Languages in Genetic Algorithms
169

some compiled languages such as Go or C with others
characterized by its speed in some string operations,
like Perl or programming ease, like Python, might re-
sult in the best of both worlds: performance and rapid
prototyping. Creating a whole multi-language frame-
work along these lines is a challenge that might be
interesting in the future.
Besides, in some cases the languages have not
been used to their full potential. Concurrent lan-
guages such as Scala or Go are actually used sequen-
tially, missing features that a priori would make them
stand out over languages not designed with that fea-
ture, such as Java.
The full set of languages and tests will also be
made available as a Docker container, which can be
downloaded easily to run it in particular environments
and machines.
ACKNOWLEDGEMENTS
This paper is part of the open science effort at the
university of Granada. It has been written using
knitr, and its source as well as the data used
to create it can be downloaded from the GitHub
repository
1
https://github.com/geneura-papers/
2016-ea-languages-PPSN/. It has been supported
in part by GeNeura Team
2
, projects TIN2014-
56494-C4-3-P (Spanish Ministry of Economy and
Competitiveness), Conacyt Project PROINNOVA-
220590.
REFERENCES
Alba, E., Ferretti, E., and Molina, J. M. (2007). The in-
fluence of data implementation in the performance of
evolutionary algorithms. In Computer Aided Systems
Theory–EUROCAST 2007, pages 764–771. Springer.
Erb, B. and Kargl, F. (2015). A conceptual model for event-
sourced graph computing. In Proceedings of the 9th
ACM International Conference on Distributed Event-
Based Systems, DEBS ’15, pages 352–355, New York,
NY, USA. ACM.
Fortin, F.-A., Rainville, D., Gardner, M.-A. G., Parizeau,
M., Gagn
´
e, C., et al. (2012). Deap: Evolutionary algo-
rithms made easy. The Journal of Machine Learning
Research, 13(1):2171–2175.
Garc
´
ıa-S
´
anchez, P., Gonz
´
alez, J., Castillo, P., Merelo, J.,
Mora, A., Laredo, J., and Arenas, M. (2010). A Dis-
tributed Service Oriented Framework for Metaheuris-
tics Using a Public Standard. In Nature Inspired Co-
operative Strategies for Optimization (NICSO 2010),
pages 211–222. Springer.
1
https://github.com/JJ/2016-ea-languages-PPSN
2
http://geneura.wordpress.com
Garc
´
ıa-S
´
anchez, P., Gonz
´
alez, J., Castillo, P.-A., Garc
´
ıa-
Arenas, M., and Merelo-Guerv
´
os, J.-J. (2013). Ser-
vice oriented evolutionary algorithms. Soft Comput.,
17(6):1059–1075.
Jose Filho, L. R., Treleaven, P. C., and Alippi, C. (1994).
Genetic-algorithm programming environments. Com-
puter, 27(6):28–43.
Merelo, J. J., Castillo, P. A., Blancas, I., Romero, G.,
Garc
´
ıa-S
´
anchez, P., Fern
´
andez-Ares, A., Rivas, V. M.,
and Valdez, M. G. (2016). Benchmarking languages
for evolutionary algorithms. In Squillero, G. and Bu-
relli, P., editors, Applications of Evolutionary Compu-
tation - 19th European Conference, EvoApplications
2016, Porto, Portugal, March 30 - April 1, 2016, Pro-
ceedings, Part II, volume 9598 of Lecture Notes in
Computer Science, pages 27–41. Springer.
Merelo, J.-J., Garc
´
ıa-S
´
anchez, P., Garc
´
ıa-Valdez, M., and
Blancas, I. (2015). There is no fast lunch: an exami-
nation of the running speed of evolutionary algorithms
in several languages. ArXiv e-prints.
Merelo-Guerv
´
os, J.-J., Romero, G., Garc
´
ıa-Arenas, M.,
Castillo, P. A., Mora, A.-M., and Jim
´
enez-Laredo,
J.-L. (2011). Implementation matters: Program-
ming best practices for evolutionary algorithms. In
Cabestany, J., Rojas, I., and Caparr
´
os, G. J., editors,
IWANN (2), volume 6692 of Lecture Notes in Com-
puter Science, pages 333–340. Springer.
Merelo-Guerv
´
os, J.-J., Castillo, P.-A., and Alba, E. (2010).
Algorithm::Evolutionary, a flexible Perl mod-
ule for evolutionary computation. Soft Computing,
14(10):1091–1109. Accesible at http://sl.ugr.es/000K.
Namiot, D. and Sneps-Sneppe, M. (2014). On micro-
services architecture. International Journal of Open
Information Technologies, 2(9):24–27.
Nesmachnow, S., Luna, F., and Alba, E. (2015). An em-
pirical time analysis of evolutionary algorithms as
c programs. Software: Practice and Experience,
45(1):111–142.
TIOBE team (2016). Tiobe index for april 2016. Technical
report, TIOBE.
Wolpert, D. H. and Macready, W. G. (1997). No free
lunch theorems for optimization. IEEE Transactions
on Evolutionary Computation, 1(1):67–82.
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
170
