
Feature Engineering for Activity Recognition from Wrist-worn Motion
Sensors
Sumeyye Konak
1
, Fulya Turan
1
, Muhammad Shoaib
2
and Ozlem Durmaz Incel
1
1
Deapartment of Computer Engineering, Galatasaray University, Ciragan Cd. No:36, Besiktas/Istanbul, Turkey
2
Pervasive Systems Group, University of Twente, Zilverling Building, PO-Box 217, 7500 AE Enschede, The Netherlands
Keywords:
Activity Recognition, Motion Sensing, Wrist-worn Devices, Mobile Sensing.
Abstract:
With their integrated sensors, wrist-worn devices, such as smart watches, provide an ideal platform for human
activity recognition. Particularly, the inertial sensors, such as accelerometer and gyroscope can efficiently cap-
ture the wrist and arm movements of the users. In this paper, we investigate the use of accelerometer sensor for
recognizing thirteen different activities. Particularly, we analyse how different sets of features extracted from
acceleration readings perform in activity recognition. We categorize the set of features into three classes: mo-
tion related features, orientation-related features and rotation-related features and we analyse the recognition
performance using motion, orientation and rotation information both alone and in combination. We utilize a
dataset collected from 10 participants and use different classification algorithms in the analysis. The results
show that using orientation features achieve the highest accuracies when used alone and in combination with
other sensors. Moreover, using only raw acceleration performs slightly better than using linear acceleration
and similar compared with gyroscope.
1 INTRODUCTION
Mobile phones’ ubiquity and the rich set of sen-
sors available on these devices make them a suitable
platform for human activity recognition (Incel et al.,
2013; Bulling et al., 2014). More recently, wrist-worn
devices, such as smart watches are also emerging as
an alternative for activity recognition. Wrist-worn de-
vices have the advantage of capturing wrist, hand and
arm movements compared to the smart phones which
are usually carried in pockets and bags. Moreover,
the smart phones may not always be attached to the
user’s body, such that it can be left on a desk, while
the wrist-worn devices are usually attached to the user
unless removed.
While other sensors, such as GPS, microphone,
can also be used for activity recognition, motion or
inertial sensors available on wrist-worn devices, such
as accelerometer, gyroscope, are among the most ef-
fective sensors for activity recognition. They can
easily capture the user’s movements and in fact ac-
tivity recognition using inertial sensors has been an
active field of research (Avci et al., 2010; Bulling
et al., 2014; Lane et al., 2010; Shoaib et al., 2015b).
These sensors also have the advantage of consuming
less battery power compared to other resource-hungry
sensors, such as GPS.
In this paper our aim is to analyse the perfor-
mance of activity recognition with different set of
features for activity recognition from wrist-worn mo-
tion sensors, particularly the accelerometer. The main
idea is to analyse how much a wrist-worn device
move, change its orientation and rotate and how these
changes can be used to recognize the activities of a
user. For this purpose, we categorize the features to
be extracted from raw accelerometer data into three
classes: motion features, orientation features and ro-
tation features. Features from the magnitude of ac-
celeration are used as the motion-related features,
whereas features from the individual axes of the ac-
celerometer are utilized to compute the orientation-
related features. Additionally, instead of using gy-
roscope for rotation information, we extract rotation-
related features, namely pitch and roll, from the accel-
eration readings. The main motivation is to explore
the effectiveness of an only-accelerometer solution.
In order to investigate the effectiveness of these
features both alone and when fused together, we use
a dataset (Shoaib et al., 2016) collected from ten par-
ticipants. A Samsung Galaxy S2 phone was used to
emulate a smart watch and was placed on the wrist
of the participants. The sampling rate was 50Hz. In
76
Konak, S., Turan, F., Shoaib, M. and Incel, O.
Feature Engineering for Activity Recognition from Wrist-worn Motion Sensors.
DOI: 10.5220/0006007100760084
In Proceedings of the 6th International Joint Conference on Pervasive and Embedded Computing and Communication Systems (PECCS 2016), pages 76-84
ISBN: 978-989-758-195-3
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

total, 13 activities were performed: eating, typing,
writing, drinking coffee, smoking, giving a talk, walk-
ing, jogging, biking, walking upstairs, walking down-
stairs, sitting and standing. Although some activities
can easily be captured by a wrist-worn device, such
as eating, typing, some are more challenging to de-
tect by such a device, such as sitting, standing. The
second category of activities are usually used in the
studies for activity recognition with mobile phones.
In the initial tests, we show how the recognition
performance can be increased with the use of orienta-
tion and rotation-related features besides the motion-
related features using only the accelerometer. In the
next round of tests, the use of linear acceleration is
investigated compared to the accelerometer and in
the last round, instead of computing rotation features
from accelerometer, gyroscope is used for extracting
rotation related features. The aim is to compare the
performance of an acceleration-only approach with
using extra sensors. In all the tests, performance of
different classifiers such as, decision tree, naive Bayes
and random forest is also compared. Our results show
that using orientation features achieve the highest ac-
curacies when used alone and in combination with
other sensors. Moreover, on average the random for-
est classifier performs the best compared with other
classifiers. Using only raw acceleration performs bet-
ter than using linear acceleration and similar com-
pared with gyroscope. The following lists the main
highlights of this paper:
• We extract pitch and roll features from the ac-
celerometer. The use of these features were inves-
tigated for activity recognition from smart phone
sensors in (Incel, 2015; Coskun et al., 2015), but
not from wrist-worn sensors.
• We categorize the set of features into three cat-
egories: motion related features, orientation-
related features and rotation-related features. We
analyse the performance of activity recognition
using motion, orientation and rotation information
both alone and in combination.
• We focus on activities that can be recognized
from wrist-worn sensors, such as eating, smoking,
and also activities, such as walking, running, that
are typically recognized by smart phone sensors
placed in the pocket. This makes our dataset more
challenging and different from those that only uti-
lize wrist-related activities.
• We analyse the performance of accelerometer-
only solution and compare its performance with
different classifiers.
2 RELATED WORK
Feature engineering is an important part of the activ-
ity recognition process. In recent years, it has been
studied extensively in the context of physical activ-
ity recognition as summarized in various survey stud-
ies (Lane et al., 2010; Bulling et al., 2014). How-
ever, most of the studies focus on the recognition of
simply physical activities at the pocket position. For
example, the authors in (Figo et al., 2010) studied
extensively various time and frequency domain fea-
tures which are suitable for running on smartphones.
They compared various features using their computa-
tion and storage complexity and described their suit-
ability for mobile devices. However, they evaluate
all these features using a threshold based mechanism
with only three activities such as walking, jumping,
and running. Moreover, this study used only one ac-
celerometer in the right jeans pocket position. Sim-
ilarly, the authors in (Kwapisz et al., 2011) also in-
vestigated various features for simple seven physical
activities at the pocket position.
Some of the studies also investigated various fea-
tures at the wrist position. However, they also mainly
focused on the simple physical activities. For exam-
ple, the authors in (Maurer et al., 2006) compared
various features on multiple body positions includ-
ing wrist using a decision tree classifier. However,
they only evaluated seven simple physical activities.
Moreover, they used only accelerometer. Previously,
we also investigated various time and frequency do-
main features for the wrist position, however, it was
done only for seven simple physical activities (Shoaib
et al., 2014).
We have previously studied the recognition of
simple and complex activities at the wrist posi-
tion, however, it was done using only two simple
time-domain features: mean and standard deviation
(Shoaib et al., 2016; Shoaib et al., 2015c). Moreover,
the main focus of that study was to evaluate the ef-
fect of increasing window size and combining sensor
data from pocket position with the wrist position on
the recognition performance of various activities. We
also did not consider any features based on pitch and
roll. In this study, we extend our previous work by ex-
ploring an extended set of features for both simple and
complex activities at the wrist position as described in
Section 1.
Feature Engineering for Activity Recognition from Wrist-worn Motion Sensors
77

3 METHODOLOGY OF FEATURE
ENGINEERING
3.1 Dataset Details
The dataset was collected from ten participants with
an age range: 23 to 35. All participants were given
two mobile phones (Samsung Galaxy S2) during data
collection. One was located in in their right trousers’
pocket. In order to emulate a smart watch or a wrist-
worn device, the other phone was located at their right
wrist. While in our previous work (Shoaib et al.,
2016), we investigated the fusion of data from both
phones, in this paper we only use the data collected
from the phone located at the wrist. Our aim is to
analyse the performance of wrist-worn devices with
these activities. Data was sampled at 50 Hz from the
phone’s accelerometer, its (virtual) linear acceleration
sensor and its gyroscope.
In total, 13 activities were included in the dataset.
Seven activities (walking, jogging, biking, walking
upstairs, walking downstairs, sitting and standing)
were performed by all the participants with a dura-
tion of 3 minutes per activity. Seven of the partici-
pants also performed the activities of eating, typing,
writing, drinking coffee and giving a talk with a dura-
tion of 5-6 minutes. Smoking data was collected from
six of the participants, where each of them smoked
one cigarette while standing, since not all the partic-
ipants were smokers. More details of the dataset can
be found in (Shoaib et al., 2016).
3.2 Feature Extraction
In this paper, our aim is to analyse the classification
performance with different feature sets, namely the
motion features, orientation features and rotation fea-
tures. The raw acceleration readings include both the
dynamic (due to movement of the phone) and static
acceleration (due to gravity) values and it is not pos-
sible to separate them when the phone is moving with-
out using gravity readings. However, in this study, in-
stead of using computing the exact orientation of the
phone, we try to detect the changes in the acceleration
readings in the individual axes.
The magnitude of acceleration (square-root of the
sum of the squares of readings in each accelerome-
ter axis) is utilized for the extraction of motion fea-
tures. From the raw acceleration readings, the follow-
ing motion features are computed over a time-window
of 20 seconds:
• Mean: The average value of the magnitude sam-
ples over a time window.
• Variance: Average of the squared differences of
the sample values from the mean value over a time
window.
• Root Mean Square (RMS): The root mean
square is the square root of the sums of each data
over a window, divided by the sample size.
• Zero-Crossing Rate (ZCR): The number of
points where a signal crosses through a specific
value corresponding to half of the signal range. In
our case, the mean of a window is utilized.
• Absolute Difference (ABSDIFF): Sum of the
differences from between each magnitude sam-
ple and the mean of that window divided by the
number of data points. This feature was utilized
in (Alanezi and Mishra, 2013) for individual ac-
celeration axis to enhance the resolution in cap-
turing the information captured by data points.
• First 5-FFT Coefficients: the first 5 of the fast-
Fourier transform coefficients are taken since they
capture the main frequency components.
• Spectral Energy: Square sum of spectral coeffi-
cients divided by the number of samples in a win-
dow.
The readings from each of the 3-axis of the ac-
celerometer are used for the computation of orien-
tation features. The following features are extracted
from each accelerometer axis such that in total 12 fea-
tures are computed:
• Standard Deviation: Square root of variance.
• Root mean square (RMS)
• Zero-crossing rate (ZCR)
• Absolute Difference (ABSDIFF)
The rotation features are computed from the
changes in the pitch and roll angles. The rotational in-
formation can be extracted from the gyroscope or ori-
entation sensor on Android phones, however this re-
quires the use of other sensors and the orientation sen-
sor was deprecated in Android 2.2 (API level 8). In
our previous work (Incel, 2015; Coskun et al., 2015),
we extracted pitch and roll information from the ac-
celeration readings. In Equation 1 and Equation 2, it
is given how the pitch and roll values are computed
respectively. In the equations x, y and z represent the
accelerometer readings in the 3-coordinates, whereas
g is the gravitational acceleration, i.e., 9.81 m/s
2
:
β =
180
Π
.tan
−1
(y/g,z/g) (1)
α =
180
Π
.tan
−1
(x/g,z/g) (2)
PEC 2016 - International Conference on Pervasive and Embedded Computing
78

Using the pitch and roll values, the following
rotation-related features are extracted such that 12
more features are extracted:
• Mean
• Standard Deviation: Square root of variance.
• Root mean square (RMS)
• Zero-crossing rate (ZCR)
• Absolute Difference (ABSDIFF)
• Spectral energy
In total, 35 features are extracted from the ac-
celerometer readings. Similar to raw acceleration
readings, the same set of features are extracted from
linear acceleration readings. In order to evaluate the
performance of rotation features extracted from gy-
roscope we extract Standard-deviation, RMS, ZCR
and ABSDIFF of three axes, resulting in 12 fea-
tures(discussed in Section 4.3).
4 PERFORMANCE EVALUATION
In this section, we present the results obtained by fol-
lowing the methodology explained in Section 3.
We used Python programming environment for
preprocessing the data and feature extraction. For
the classification phase, we used Scikit-learn (Version
0.17), which is a also Python-based machine learn-
ing toolkit (Pedregosa et al., 2011). Three classifiers,
which are commonly used for practical activity recog-
nition, are utilized: Naive Bayes, decision tree and
random forest (Shoaib et al., 2015b; Shoaib et al.,
2015a). All the classifiers were set in their default
mode. For the decision tree, Scikit-learn uses an op-
timized version of the CART (Classification and Re-
gression Trees) algorithm.
In the classification phase, we used 10-fold strat-
ified cross-validation without shuffling. In this vali-
dation method, the whole dataset is divided into ten
equal parts or subsets and at each iteration, nine of
these parts are used for training and one part for test-
ing. The window size was selected as 20 seconds
since in our previous work (Shoaib et al., 2016), it was
shown that larger window sizes achieve higher accu-
racies with activities where wrist movements domi-
nate and are less-repetitive.
4.1 Recognition with Accelerometer
In this section, we present the results obtained by us-
ing raw acceleration readings and discuss how mo-
tion, orientation and rotation features perform when
both used alone and in combination. We also com-
pare the recognition performance of different classifi-
cation algorithms, namely naive Bayes, decision tree
and random forest.
In Figure 1, the results of experiments using de-
cision tree classifier are presented. In this test, the
aim is to analyse different combinations of features in
detail.The y axis represents the accuracy values. Al-
though the accuracy values range between zero and
one, in the text, we mention the accuracies in terms of
percentages, for the ease of reading.
When the results of individual sets of features
are analysed (only motion, only orientation, only
rotation), in general using only orientation features
achieves the highest accuracy for most activities with
a few exceptions. For example, the motion features
perform better for walking, biking, walking down-
stairs and rotation features for sitting, smoking and
eating.
For various combinations of different feature sets,
such as motion and orientation (MO), motion and ro-
tation (MR) and orientation and rotation (OR), the
combination of motion and orientation features (MO)
achieves the highest accuracies for different activities.
Compared with the single sets of features, the com-
bination of feature sets performs better for drinking
coffee, talking, smoking, eating and walking down-
stairs. For other activities, either motion or orienta-
tion features perform better, except sitting where ro-
tation features achieve the highest accuracy. When
all feature sets are used together (MOR), accuracies
either remained the same, or decreased in few cases.
It could be that adding rotation features increased the
confusion rate between activities. Only exception is
the sitting activity, where rotation and motion-rotation
features (MR) achieve the best results.
The average accuracy for all activities is 69% for
motion features, 78% for orientation, 76% for rota-
tion, 81% for motion-orientation, 79% for motion-
rotation, 79% for orientation-rotation and 77% for
motion-orientation-rotation combinations. Overall,
using motion and orientation features achieves the
highest accuracy on average. We achieve the highest
accuracy for biking and jogging and lowest accuracy
for walking, walking upstairs and downstairs, because
these activities were confused with each other. An
example confusion matrix for Random Forest classi-
fier using motion-orientation features is given in Ta-
ble 1. Additional sensors, such as pressure, can be
used in differentiating these activities or they can be
combined into a single activity if possible.
In Figure 2, results with naive Bayes classifier are
presented. Compared with decision tree results given
in Figure 1, accuracies for all the activities have in-
Feature Engineering for Activity Recognition from Wrist-worn Motion Sensors
79
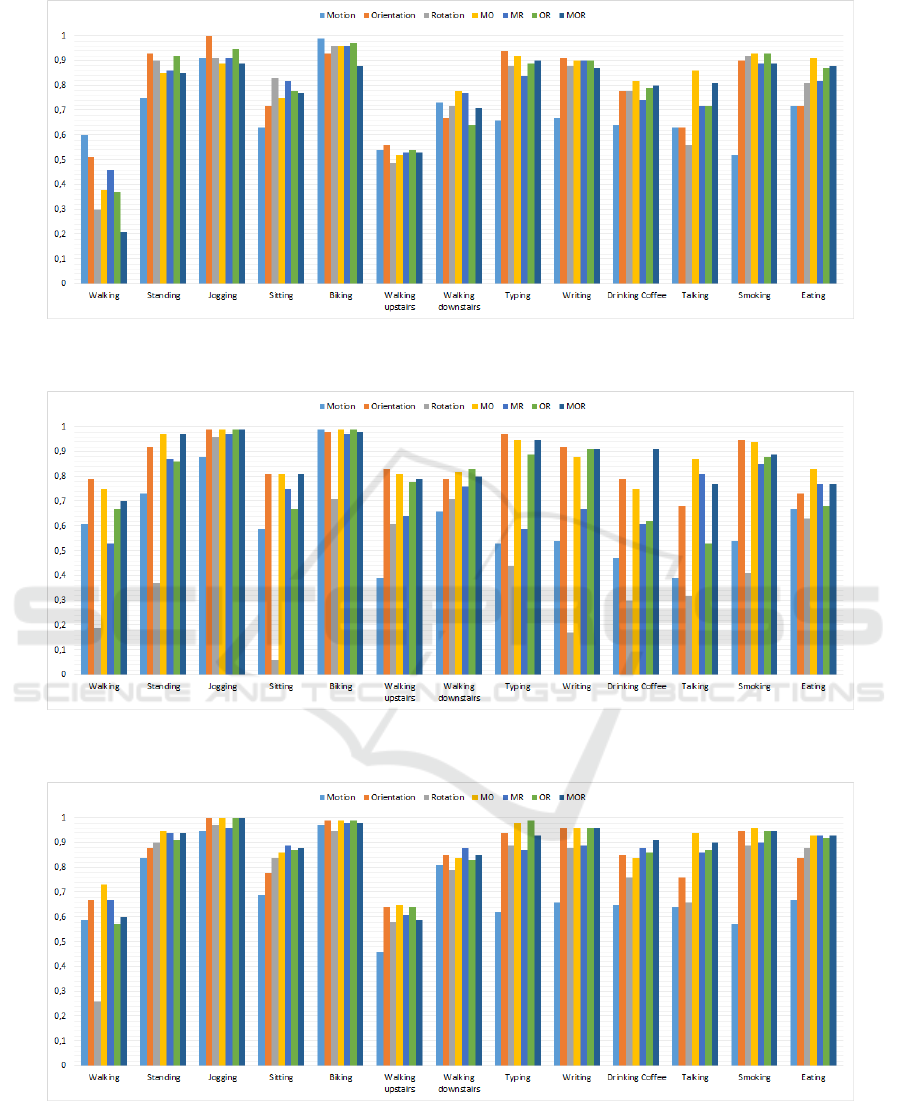
Figure 1: Recognition performance of accelerometer with different feature combinations using decision tree classifier
(M:Motion, O:Orientation, R: Rotation).
Figure 2: Recognition performance of accelerometer with different feature combinations using Naive Bayes classifier
(M:Motion, O:Orientation, R: Rotation).
Figure 3: Recognition performance of accelerometer with different feature combinations using Random Forest classifier
(M:Motion, O:Orientation, R: Rotation).
creased except for eating and sitting activities. Partic-
ularly, walking, walking upstairs and downstairs ac-
tivities are recognized with higher accuracies. Simi-
lar to the decision tree results, the orientation features
are the dominant set of features in achieving high ac-
curacy. Walking, walking upstairs, typing, writing
PEC 2016 - International Conference on Pervasive and Embedded Computing
80

Figure 4: Comparison of Decision Tree, Naive Bayes and
Random Forest in terms of average accuracy (M:Motion,
O:Orientation, R: Rotation).
and smoking are recognized with the highest accu-
racy when only orientation features were used. The
highest average accuracies for all the activities are
computed as 86% with motion features and 87% with
motion-orientation features.
In Figure 3, the results of the experiments us-
ing random-forest classifier are presented. In par-
ticular, the maximum average accuracy is achieved
with motion and orientation features which is 89%.
This is higher compared with other classifiers where
maximum average accuracy is 81% for decision tree
with motion-orientation features, and 87% with naive
Bayes classifier again using motion-orientation fea-
tures. In Figure 4 we present a comparison of the
classifiers in terms of their average performance.
In general, random forest achieves the highest ac-
curacies for most of the activities. However, naive
Bayes achieves higher accuracies for walking and
walking upstairs activities. As mentioned, these ac-
tivities are confused with each other and an example
confusion matrix is given in Table 1 using motion-
orientation features.
4.2 Recognition with Linear
Acceleration
In this section, our aim is to analyse the performance
with linear acceleration readings instead of using raw
acceleration. The accelerometer sensor on Android
phones, measures the gravitational acceleration, if the
device is stationary or its speed does not change. If
the phone is accelerating, it measures the combina-
tion of the gravitational acceleration and the acceler-
ation due to movement and this acceleration due to
movement, is named as the “linear acceleration”. We
only provide the results with the random forest clas-
sifier in this section due to space limitation. We also
experimented with the other two classifiers, however
random forest achieved the highest accuracies similar
to raw acceleration results.
The results are given in Figure 5. When we com-
pare these results with the results obtained with raw
acceleration, given in Figure 3, we see that results
are either the same or slightly lower with linear ac-
celeration. Particularly, the walking activity is rec-
ognized with 64% accuracy using motion features
with linear acceleration whereas it is recognized with
73% accuracy using raw acceleration with motion-
orientation features, which results in 9% lower accu-
racy. Computing linear acceleration readings gener-
ally consumes more battery power and may not be
preferred in real-time, continuous-running applica-
tions of activity recognition (Incel, 2015).
4.3 Recognition with Acceleration and
Gyroscope
In this section, we aim to analyse whether gyroscope
should be used for extracting rotation features. As
mentioned we extracted features from pitch and roll
values which were computed from raw acceleration
readings. Hence, in this section we extract rota-
tion features from gyroscope and use them either in
combination with motion and orientation features ex-
tracted from raw acceleration or alone. We replace
the twelve rotation features extracted from accelera-
tion with the twelve features extracted from the indi-
vidual axes of gyroscope: Standard-deviation, RMS,
ZCR and ABSDIFF. The evaluation is performed with
the random forest classifier.
Results are given in Figure 6. In general, us-
ing only rotation, i.e. the gyroscope, performs
worse than using combinations of features. Com-
pared with the results obtained with raw accelera-
tion, given in Figure 3, most of the activities are
recognized with a similar accuracy. However, sit-
ting, walking upstairs and downstairs are recog-
nized with 4%, 12% and 9% higher accuracies com-
pared with raw acceleration. The average accuracy
considering all the activities is around 90% when
using motion-rotation or motion-orientation-rotation
features, which was 88% when motion-orientation-
rotation features are calculated from raw acceleration.
Although an accelerometer-only solution provides an
efficient solution, gyroscope can compute exact ro-
tation information, compared to using accelerometer
for computing pitch and roll values. However, the
average performance with only acceleration solution
is still acceptable with 89% accuracy using motion-
orientation features.
Feature Engineering for Activity Recognition from Wrist-worn Motion Sensors
81
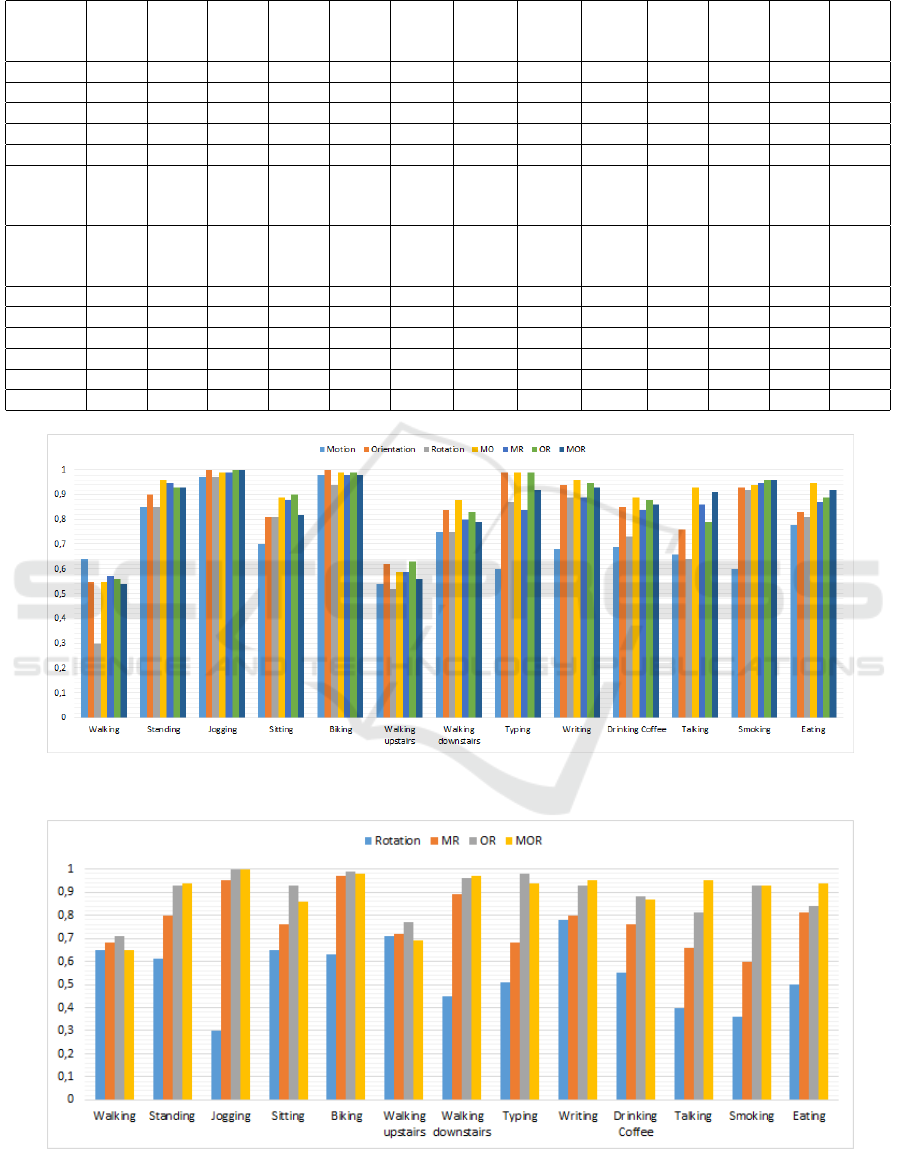
Table 1: Confusion Matrix with Random Forest using motion-orientation features, in %.
Walk Stand Jog Sit Bike Walk
Up-
stairs
Walk
Down-
stairs
Type Write Drink Talk Smoke Eat
Walk 72.22 0 0 0 0 23.33 4.44 0 0 0 0 0 0
Stand 0 92.22 0 0 0 0 0 0 0 2.22 2.22 3.33 0
Jog 0 0 100 0 0 0 0 0 0 0 0 0 0
Sit 0 0 0 84.44 0 0 0 1.11 4.44 7.78 0 0 2.22
Bike 0 0 0 2.22 97.78 0 0 0 0 0 0 0 0
Walk
Up-
stairs
23.33 0 0 0 0 64.44 12.22 0 0 0 0 0 0
Walk
Down-
stairs
2.22 0 0 0 0 11.11 84.44 0 0 0 2.22 0 0
Type 0 0 0 0 0 0 0 97.78 1.11 1.11 0 0 0
Write 0 0 0 0 0 0 0 1.11 97.78 0 0 0 1.11
Drink 0 1.11 0 10 0 0 0 0 0 83.33 1.11 1.11 3.33
Talk 0 0 0 0 0 0 0 0 0 0 93.33 2.22 4.44
Smoke 0 0 0 0 0 0 0 0 0 1.11 0 98.89 0
Eat 0 0 0 0 0 0 0 0 0 3.33 0 0 96.67
Figure 5: Recognition performance of linear accelerometer with different feature combinations using Random Forest classifier
(M:Motion, O:Orientation, R: Rotation).
Figure 6: Recognition performance of acceleration and gyroscope with different feature combinations using Random Forest
(M:Motion, O:Orientation, R: Rotation).
PEC 2016 - International Conference on Pervasive and Embedded Computing
82

5 CONCLUSION AND FUTURE
WORK
In this paper, the main motivation is to evaluate the
performance of activity recognition with wrist-worn
devices using inertial sensors and particularly anal-
yse the performance with different feature sets. We
categorize the set of features into three classes: mo-
tion related features, orientation-related features and
rotation-related features and we analyse the perfor-
mance using motion, orientation and rotation infor-
mation both alone and in combination. We utilize
a dataset collected from 10 participants with thir-
teen activities and use decision tree, naive Bayes and
random forest classification algorithms in the analy-
sis. The results show that using orientation features
achieve the highest accuracies when used alone and in
combination with other sensors. However, the com-
bination of all features (motion, orientation and ro-
tation) does not usually improve the results. Con-
sidering the average accuracies, random forest clas-
sifier achieves the highest performance. Additionally,
using only raw acceleration performs slightly better
(89%) than using linear acceleration and similar com-
pared with gyroscope. Hence, our results show that
using an accelerometer only solution can perform as
well as using linear acceleration or using both an ac-
celerometer and gyroscope. The main advantage is
that an acceleration-only solution consumes less bat-
tery power and this is an important factor for real-
time, continuous-running applications.
We are currently collecting a dataset using smart
watches and particularly focusing on the recognition
of smoking. As a future work, we plan to apply the
same methodology to the new dataset. Moreover, we
aim to apply feature selection methods and reduce the
number of features used and analyse the battery con-
sumption on a smart watch.
ACKNOWLEDGEMENTS
This work is supported by the Galatasaray Univer-
sity Research Fund under Grant Number 15.401.004,
by Tubitak under Grant Number 113E271 and by
Dutch National Program COMMIT in the context of
SWELL project.
REFERENCES
Alanezi, K. and Mishra, S. (2013). Impact of smartphone
position on sensor values and context discovery. Tech-
nical Report 1030, University of Colorado Boulder.
Avci, A., Bosch, S., Marin-Perianu, M., Marin-Perianu, R.,
and Havinga, P. (2010). Activity recognition using
inertial sensing for healthcare, wellbeing and sports
applications: A survey. In 23th International Con-
ference on Architecture of Computing Systems, ARCS
2010, pages 167–176.
Bulling, A., Blanke, U., and Schiele, B. (2014). A tuto-
rial on human activity recognition using body-worn
inertial sensors. ACM Computing Surveys (CSUR),
46(3):33.
Coskun, D., Incel, O., and Ozgovde, A. (2015). Phone posi-
tion/placement detection using accelerometer: Impact
on activity recognition. In Intelligent Sensors, Sensor
Networks and Information Processing (ISSNIP), 2015
IEEE Tenth International Conference on, pages 1–6.
Figo, D., Diniz, P. C., Ferreira, D. R., and Cardoso, J. M.
(2010). Preprocessing techniques for context recogni-
tion from accelerometer data. Personal and Ubiqui-
tous Computing, 14(7):645–662.
Incel, O., Kose, M., and Ersoy, C. (2013). A review and
taxonomy of activity recognition on mobile phones.
BioNanoScience, 3(2):145–171.
Incel, O. D. (2015). Analysis of movement, orientation and
rotation-based sensing for phone placement recogni-
tion. Sensors, 15(10):25474.
Kwapisz, J. R., Weiss, G. M., and Moore, S. A. (2011).
Activity recognition using cell phone accelerometers.
ACM SigKDD Explorations Newsletter, 12(2):74–82.
Lane, N. D., Miluzzo, E., Lu, H., Peebles, D., Choudhury,
T., and Campbell, A. T. (2010). A survey of mobile
phone sensing. Communications Magazine, IEEE,
48(9):140–150.
Maurer, U., Smailagic, A., Siewiorek, D. P., and Deisher,
M. (2006). Activity recognition and monitoring using
multiple sensors on different body positions. In Wear-
able and Implantable Body Sensor Networks, 2006.
BSN 2006. International Workshop on, pages 4–pp.
IEEE.
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., Blondel, M., Prettenhofer,
P., Weiss, R., Dubourg, V., Vanderplas, J., Passos,
A., Cournapeau, D., Brucher, M., Perrot, M., and
Duchesnay, E. (2011). Scikit-learn: Machine learning
in Python. Journal of Machine Learning Research,
12:2825–2830.
Shoaib, M., Bosch, S., Durmaz Incel, O., Scholten, J., and
Havinga, P. J. (2015a). Defining a roadmap towards
comparative research in online activity recognition on
mobile phones.
Shoaib, M., Bosch, S., Incel, O. D., Scholten, H., and
Havinga, P. J. (2014). Fusion of smartphone mo-
tion sensors for physical activity recognition. Sensors,
14(6):10146–10176.
Shoaib, M., Bosch, S., Incel, O. D., Scholten, H., and
Havinga, P. J. (2015b). A survey of online ac-
tivity recognition using mobile phones. Sensors,
15(1):2059–2085.
Shoaib, M., Bosch, S., Incel, O. D., Scholten, H., and
Havinga, P. J. M. (2016). Complex human activity
Feature Engineering for Activity Recognition from Wrist-worn Motion Sensors
83

recognition using smartphone and wrist-worn motion
sensors. Sensors, 16(4):426.
Shoaib, M., Bosch, S., Scholten, H., Havinga, P. J., and In-
cel, O. D. (2015c). Towards detection of bad habits by
fusing smartphone and smartwatch sensors. In Perva-
sive Computing and Communication Workshops (Per-
Com Workshops), 2015 IEEE International Confer-
ence on, pages 591–596. IEEE.
PEC 2016 - International Conference on Pervasive and Embedded Computing
84
