
Towards Preventive Control for Open MAS
An Aspect-based Approach
Mohamed Sedik Chebout
1, 2
, Farid Mokhati
2
, Mourad Badri
3
and Mohamed Chaouki Babahenini
4
1
Department of Mathematics and Computer Science, University of Ouargla, Ouargla, Algeria
2
Department of Mathematics and Computer Science, RELA(CS)2 Laboratory,
University of Oum el Bouaghi, Oum el Bouaghi, Algeria
3
Department of Mathematics and Computer Science, Software Engineering Research Laboratory,
University of Quebec, Trois-Rivières, Canada
4
Department of Mathematics and Computer Science, LESIA Laboratory, University of Biskra, Biskra, Algeria
Keywords: Open MAS, Preventive Control, Aspect Paradigm, Profiling.
Abstract: In Open MAS (Open Multi Agent Systems), agents can freely join and leave systems at any time. The inherent
specificities of such systems like dynamicity, non-determinism and emergency make their target states
difficult to achieve. Agents, in Open MAS, are often heterogeneous, self-interested with conflicting individual
goals and limited trust. Consequently, newly entered (external) agents are often considered as a potential
disturbance of systems. In this paper, we present a novel preventive control approach based on Aspect-
Oriented Programming (AOP) paradigm for mastering Open MAS’ behaviour. The proposed control process
is mainly accomplished in two steps: (1) Observing agents movements by intercepting all external requests
of agents wanting accessing to the system. A request analysis process will be held in terms of compliance
capabilities presented by this agent, and (2) Deciding, based on AspectJ constructors, either to allow agents
if the capabilities they have enable a possible progress in actual system state to the target state, or prevent it
otherwise. The proposed approach is illustrated using a MaDKit-based application.
1 INTRODUCTION
Open multi-agent systems (Open MAS) are societies
in which autonomous, heterogeneous and
independently designed entities can work towards
similar or different ends (Lopez, 2003). An open
multi-agent system is a MAS where agents may be
added, removed or evolve (e.g. modify their abilities).
Moreover, open MAS should support and deal with
three possible modifications of their composition
(Vercouter, 2000): Addition of an agent to the MAS
(in order to provide new capabilities), Removal of an
agent from the MAS (if its capabilities are obsolete)
or Evolution of an agent (the agent gains new
capabilities and loses some of its old capabilities).
Although heterogeneity and autonomy are the
required properties of the agents to build open and
flexible systems, they are always subject to
unanticipated interactions, and increase the
vulnerability of the system to the introduction of
faulty or malevolent agents, because it is not possible
to directly constrain agents’ behaviour (Vercouter
and Muller, 2010). To avoid that, it is necessary to
define and implement control mechanisms to reduce
as possible the gap between the observed behaviour
and the desired one, i.e.: is it possible for a given
system starting from any initial state, to get a given
target state in a predefined fixed time? For this, it is
essential to use (or to define) control mechanisms to
guide the system toward target state.
In addition, controllability plays a crucial role in
many control problems such as openness that we are
trying to tackle it. Moreover, to ensure this property
for a given system, a control process needs, at first
time, a monitoring mechanism to measure system
behaviour in a given moment (It’s about
observability). After that, we proceed through means
of actions to redirect current measured state for the
target one. Accordingly, observability and control are
dual aspects of the same problem (Ionete et al., 2006).
In order to reach our goal, we start by identifying
the main features relating to open MAS (Table 1).
Our aim behind this collection is to focus on a very
specific aspect around open MAS. In order to well
Chebout, M., Mokhati, F., Badri, M. and Babahenini, M.
Towards Preventive Control for Open MAS - An Aspect-based Approach.
DOI: 10.5220/0006005602690274
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 1, pages 269-274
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
269
position the current research work, the following
table summarizes some characteristics that we
consider interesting for our contribution:
Table 1: Some open MAS characteristics in literature.
N
°
open MAS Characteristics ref
1
Agents are owned by various stakeholders
with different aims and objectives.
Huynh, 2006 and
Vercouter, 2000
2
No agent can know everything about its
environment.
3
The agents are likely to be unreliable and
self-interested.
4
No central authority can control all the
agents.
5
An open system should support the
addition or the removal of some functions
after its design (and generally, during its
execution).
Vercouter,
2000
6
In open MAS, the internal aspects of
agents are inaccessible. The only
accessible information about agents is their
observable behavior from the exchange of
agents' messages.
Paes, 2005a
7
Open multi-agent systems are societies in
which autonomous, heterogeneous and
independently designed entities can work
towards similar or different ends.
Silva,
2007
In Open MAS context, MaDKit: Multi-Agent
Development KIT (Gutknecht and Ferber, 2000), is a
generic multi-agent platform that allows development
of open, dynamic and distributed applications based
on an organizational model called AGR (Agent,
Group, Role) presented in (Mansour and Ferber,
2007). Furthermore, Aspect-Oriented Programming
(AOP) was proposed firstly in (kiszales et al., 1997),
and since then, it has received considerable attention
in many research works. AOP provides a band new
modularization technique by encapsulating
crosscutting concerns, leading to the production of
software systems that are easier to understand,
maintain and reuse. Crosscutting concerns are defined
as system concerns (such as logging, exception
handling, etc.) that crosscut conventional system
modules (such as objects, components, and agents)
(Kiszales et al, 1997; Kiszales et al., 2001).
The programmer specifies in the AOP language
how and where to place the instrumentation (adding
new or modifying existing program functionalities
and also extending or enhancing the execution of the
program to be observable) (Sarrab, 2015). Although
its great success as AOP language, AspectJ (Kiczales
et al, 2001) is used with an indecent manner for
profiling (David et al, 2007).
In this paper, we present a novel preventive
control approach based on Aspect-Oriented
Programming (AOP) paradigm for mastering open
MAS’ behaviour. The proposed control process is
mainly accomplished in two steps: (1) Observing
agents movements by intercepting all external
requests of agents wanting accessing to the system. A
request analysis process will be held in terms of
compliance capabilities presented by this agent, and
(2) Deciding, based on AspectJ constructors, either to
allow agents if the capabilities they have enable a
possible progress in actual system state to the target
state, or prevent it otherwise.
The remainder of this paper is organized as
follows: In section 2 we give an overview of major
related work. In section 3 we present the
organizational model and its implementation under
MaDKit agent platform. We give an overview of
Aspect oriented programming and AspectJ language
in section 4. Section 5 is devoted to the presentation
of our approach. Finally, conclusion and some future
work directions are presented in section 6.
2 STATE OF THE ART
In this section, we present briefly some works
targeting the control issue in MAS:
François Klein et al. have proposed in (Klein et
al., 2009) an experimental dynamical approach to
enhance the control of the global behaviour of
a reactive MA using a Markov decision process
(MDP). This approach is based on modeling of global
system behaviour and the possible transitions
between these behaviours that system can adopt,
exploited by a control policy defined by machine
learning. The control process implemented has the
ability to directly change agent behaviour through
parameters. However, modeling system behaviour
represents a centralized view of system status, which
conflict with the distributed nature of MAS.
In the same context, Howard Carolina Felicissimo
et al. have proposed in (Felicissimo, 2005a;
Felicissimo, 2005b; Felicissimo, 2008) an extended
study on automatic regulation of open MAS based on
normative generic ontologies:
In (Felicíssimo, 2005a), the authors have
proposed a normative ontology-based approach to
define regulations over roles in open MAS. The
ontology is independent of domain and has five
related basic concepts: Role, Norm, Penalty, Action
and Place. This ontology’s structure provides a
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
270
semantic support for agents to base their behaviour
according to norms and to reason about action
selection.
In (Felicíssimo, 2008) an approach called
DynaCROM (DYNAmic Contextual Regulation in
formation provision in open MAS) has been proposed
for smoothly applying and managing regulations in
open MASs as well as for enforcing precise
contextual norms. The DynaCROM’s main
contributions are: “(i) a definition of a top-down
classification for contextual norms, which facilitates
the tasks of elucidation, organization and
management of norm information; (ii) a contextual
normative ontology to explicitly represent the
semantic of classified norms in a meaningful way
(i.e., with a common understanding) for
heterogeneous agents; (iii) a definition of a norm
composition process, based on ontology-driven rules,
that makes it easy to update the system regulation by
both evolving norms in a unique resource (an
ontology) and by activating particular rules for
acquiring customized compositions of contextual
norms; and (iv) a solution for enforcing contextual
norms”. DynaCROM is still a work in progress.
Although these works have considerably
forwarded the domain by proposing novel approaches
for Open MAS control, they did not deal with
preventive control, which allows to avoid as soon as
possible falling into an unpredictable situation caused
by external agent’s heterogeneity and their suspect
behaviour.
The approach we propose in this paper focuses,
particularly, on the control in open MAS, in order to
provide control mechanisms to them. For this reason,
our goal is to predict disturbance source caused by the
entry of new external agents in the system. These
latters share some properties such as: heterogeneity,
different aims and objectives, internal architecture
that is inaccessible, etc. Therefore, we aim to benefit
from Aspect-Oriented Programming advantages to
avoid any kind of system disturbance caused by
external agent’s movement.
3 MADKIT AGENT PLATFORM
MaDKit: Multi-Agent Development KIT (Gutknecht
and Ferber, 2000), is a generic platform for design
and implementation of multi-agent systems. This
platform is based on an organizational model (Figure
1), named AGR (Agent, Group, Role) (Ferber et al.,
2003), rather than an agent architecture or specific
interaction model. MaDKit, also, uses an execution
engine wherein each agent is built starting from a
microkernel.
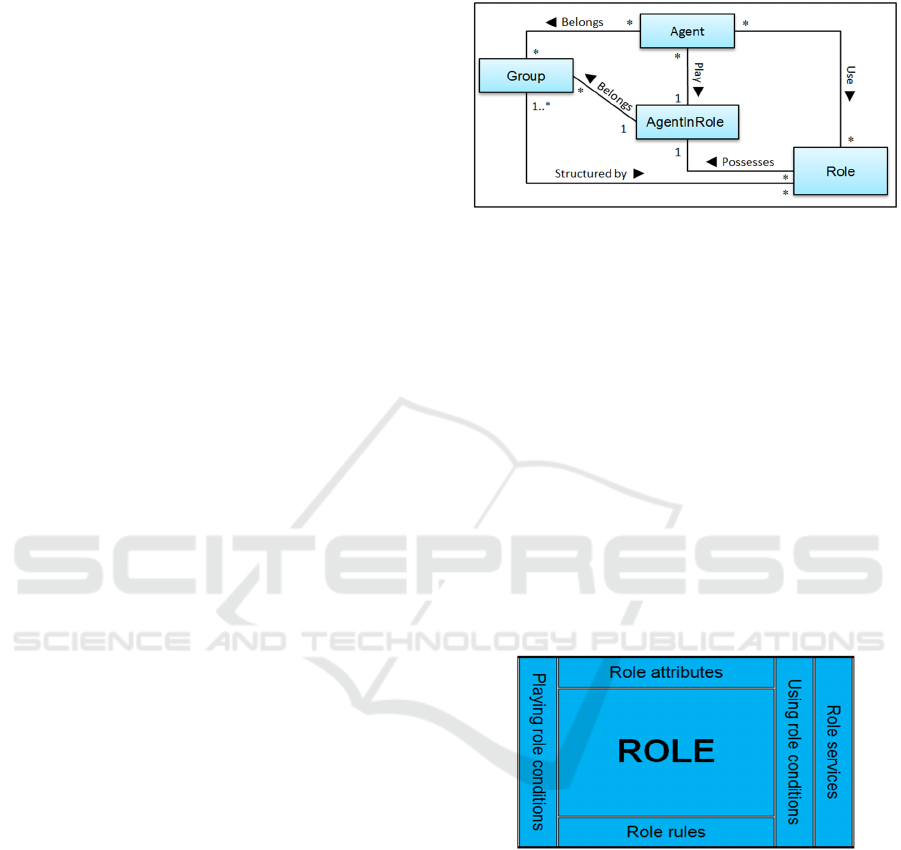
Figure 1: Simplified UML model for AGR (Mansour and
Ferber, 2007).
Considering the role definition that represents the
primordial concept in the organizational model,
(Mansour and Ferber, 2007) have defined role as a
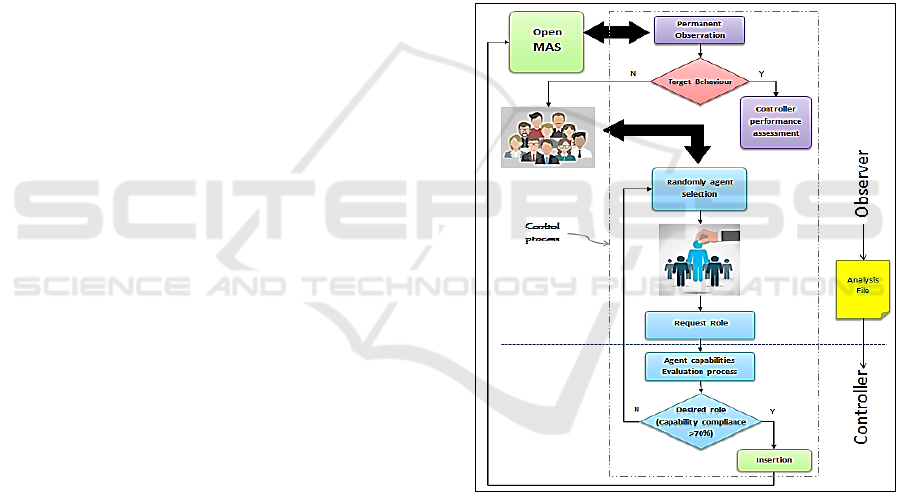
sixfold : <Gr, Nm, Cd, Sv, At, Rl> where:
• Gr : the group identifier in which the role
belongs,
• Nm : Role name,
• Cd : Role conditions, there are two types :
Cdj: conditions that must meet an agent
wishing play a role.
CdU: conditions that must meet an
agent playing a role.
• Sv : a set of services defined in the role,
• At : Internal attributes of the role,
• Rl: a set of rules that govern role.
Figure 2: Role’s Architecture (Mansour and Ferber, 2007).
We use in the rest of this paper, the term capability
rather than service. According to (Mansour and
Ferber, 2007), a service is a set of functionality that
agent should suggest or ask even basic functions:
send/receive message, creation of groupe/role,
exploration of acquaintance agent list, etc. Moreover,
there are two aspects of reasoning about the
capabilities of an agent to achieve its goals,
according to (He and Ioerger, 2003) :
• Logical reasoning, which is based on whether
the agent can determine a plan that can be used
to achieve a goal (i.e. “know-how”).
Towards Preventive Control for Open MAS - An Aspect-based Approach
271
• Quantitative reasoning about levels of skill and
whether a set of tasks can be achieved within a
specified time and with quality constraints.
Capabilities in this sense are determined by
the limits of internal processing capacity”
Therefore, capability is an intrinsic functionality
attribute. Furthermore, Agent cannot realize either
functionality or achieves its goals if it does not have
the necessary capabilities. As well, capability is an
attribute related much more to performance or how
much time and effort required for doing such task,
against, service is a concept purely related to design.
4 ASPECTJ FOR PROFILING
AspectJ (Kiczales et al., 2001) is a practical aspect-
oriented extension to the Java programming
language. AspectJ is the most widely used aspect-
oriented programming language; it supports the
definition of aspects, advices, join points, and
pointcuts. Join points (Kiczales, 2001) are well-
defined points in the execution of the program;
pointcuts are collections of join points; advices are
special method-like constructs that can be attached to
pointcuts and aspects which are modular units of
crosscutting implementation, comprising pointcuts,
advice, and ordinary Java member declarations.
For more information and details about AspectJ
constructs, the reader is invited to consult (Laddad,
2009), (Apel and Batory, 2010).
Our proposal for observing open MAS behaviour
is to use AspectJ for profiling MAS specific attributes
(i.e. dynamic analysis). This choice is motivated by
the fact that traditional profilers like (JVMPI: Java
Virtual Machine Profiler Interface) (Liang and
Viswanathan, 1999) and its successor (JVMTI: Java
Virtual Machine Tool Interface) (O’Hair, 2006)
present some drawbacks: (1) it is a fixed interface
and, as such, can only enable predefined types of
profiling; (2) enabling the JVMPI often dramatically
reduces performance. Thus, in AspectJ, the
programmer specifies how and where to place the
instrumentation. AspectJ also allows for both compile
time and load time instrumentation and makes use of
BCI (ByteCode Instrumentation) libraries to
instrument the application.
In (David et al., 2007), the authors have
demonstrated that AspectJ, after investigating four
common profiling problems (heap usage, object life
time, wasted time and time-spent), was sufficiently
flexible to support the four profiling examples. In
addition, it was reasonably efficient in most cases, of
course with some uncovered limitations according to
(David et al., 2007), like: load-time weaving standard
libraries, state association, array allocation join point
and synchronization.
5 PROPOSED APPROACH
Our proposal (Figure 3) is to control a priori open
MAS by intercepting all external requests from agents
that want to enter in the system. As it is quoted above,
open MAS share properties according to agent’s
heterogeneity, different agent’s aims and objectives.
This explains that the integration of a new agent in the
system might be a potential source of current state
disruption, and therefore emergent behaviour will
take place.
Figure 3: The methodologies of our approach.
In order to avoid falling into such situation, we
propose to implement an observer aspect, which is
responsible for the permanent monitoring of the entry
of new agents, once this last wants to get in system.
On the one hand, observer aspect represents,
actually, a part of control process, which is also
composed of a module that deals with evaluation of
agent capabilities; this last, is the core of the control
process. On the other hand, agent’s role request is
composed, as it is mentioned in section 3, by a set of
fields. We focus in our context on Cd (Role
Condition) especially CdU field that denote
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
272
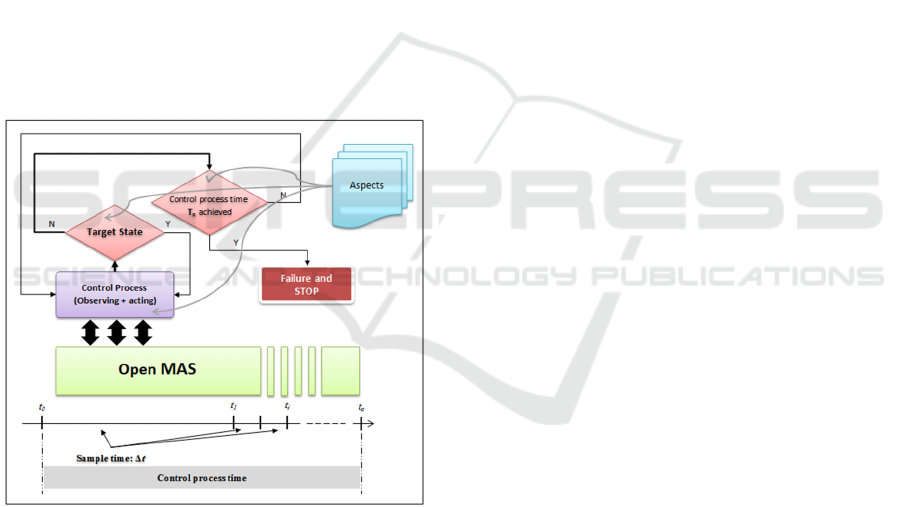
conditions that must meet an agent playing a role. In
this case, Agent capabilities evaluation process
analyses the compliance of role in terms of agent
capabilities. We suppose that provided role by agent
includes several capabilities, every capability is
associated with a control degree. We assume, also,
that we cannot judge the reliability of the capability
offered by the agent (Table1, characteristic n°3).
After that, if the rate of agent capability reaches
certain level (we choose initially a considerable rate:
up then 70%), the agent is allowed to enter, otherwise,
it will be prevented using a specific aspect. As well,
capabilities evaluation process must analyse another
agent’s request and so on.
The control process proceeds until the target
system state is reached. According to (Klein et al.,
2009), current system state measurement, depend
strongly of the studied system. Therefore, each
system has a different configuration compared to
other systems. Thus, we adopt a performance measure
related to control time, i.e.: the control process
elapsed time to master the behaviour of the studied
system.
Figure 4: Control process time.
For that, we propose to implement an aspect
named profiler Aspect. This latter enables
intercepting the first call to the first explicit agent
requesting role. Then, we will capture current state
each sample time (Figure 4), to compare it with the
target state (i.e expected system result). We check
also, if the total control time is reached without
getting desired result, the preventive control process
present a failure, and in this case the system no longer
has the controllability property.
6 CONCLUSION AND FUTURE
WORK
In this paper, we have studied the controllability of
Open multi-agent system, using Aspect oriented
programming paradigm under MaDKit platform.
Our approach consists, initially, to predict any
potential source of system disturbance caused by
openness property, by analyzing system dynamics in
terms of external agents that get in the system,
through profiling mechanism using AspectJ
language. Thus, we exhibit that AspectJ has
demonstrated its efficiency in such situation against
existing profilers that limit profiling types in a very
reduce number and its negative impact on analysed
system performance. Furthermore, the controller uses
the power of AspectJ constructs to act in a way to
enable or block all requests coming from entering
agents, having a certain degree of impeding of current
system state.
In fact, this work is in progress, and the approach
explained in this paper represents a first step of a
novel open MAS control process. As future work, we
plan to extend the proposed approach in order to
support more features relating to open MAS control,
especially, posteriori control, using reinforcement
learning, or simply, how to endow agents with
learning mechanisms for achieving their goals?
REFERENCES
Apel, S., Batory, D. 2010. ‘How aspectj is used: an analysis
of eleven aspectj programs’. Journal of Object
Technology (JOT), 117-142.
David, J, P., Matthew, W., Robert, B ., Paul, H, J, K., 2007
. ‘Profiling with AspectJ’, Software—Practice &
Experience, 37(7), 747-777.
Felicíssimo, C., Lucena, D., Carvalho, G., Paes, R., 2005.
‘Normative ontologies to define regulations over roles
in open multi-agent systems’ , In Proceedings AAAI
Fall Symp, 171 -176.
Felicíssimo, C., Lucena, D., 2005. ‘An approach to regulate
open multi-agent systems based on a generic normative
ontology’ In Proceedings of the 1st Workshop on
Software Engineering for Agent-oriented Systems
(SEAS).
Felicíssimo, C., Chopinaud, C., Briot, J, P., Seghrouchni,
A., Lucena, C., 2008. ‘Contextualizing normative open
multi-agent systems’. In Proceedings of 23rd Annual
ACM Symposium on Applied Computing (SAC 2008), 1,
52-59.
Ferber, J., Gutknecht, O., Michel, F., 2004. ‘From Agents
to Organizations, an Organizational View of Multi-
Agent Systems’. Agent-Oriented Software Engineering
Towards Preventive Control for Open MAS - An Aspect-based Approach
273

(AOSE) IV, P. Giorgini, Jörg Müller, James Odell, eds,
Melbourne, July 2003, LNCS 2935, 214-230.
Gradecki, J, D., Lesiecki, N., 2003. ‘Mastering AspectJ:
Aspect- Oriented Programming in Java’. Wiley
Publishing, Inc., Indianapolis, Indiana.
Gutknecht, O., Ferber, J., 2000. ‘MaDKit : une architecture
de plate-forme multi-agent générique’. Rapport de
recherche, Laboratoire d’Informatique, de Robotique
et de Microélectronique de Montpellier (LIRM),
Université de Montpellier II.
He, L., and Ioerger, T, R., 2003. ‘A quantitative model of
capabilities in multi-agent systems’. In Proceedings of
International Conference on Artificial Intelligence,
730-736.
Huynh, T. D., Jennings, N. R., Shadbolt, N. R. 2004b.
‘FIRE: An integrated trust and reputation model for
open multi-agent systems’. In Proceedings of the 16th
European conference on artificial intelligence (ECAI),
18–22.
Ionete, C., Cela, A., Gaid, M, B., 2006. ‘Controllability and
observability of input/output delayed discrete
systems’, In Proceedings of IEEE Amer. Control
Confeerence, 3513-3518.
Kiczales, G.,Hilsdale, E., Hugunin, J., Kersten, M., Palm, J.
& Griswold, W.G., 2001. ‘An Overview of aspectJ’. In
proceedings of the European Conference on Object-
Oriented Programming.
Kiczales, G., Lamping, J., Menhdekar, A., Maeda, C.,
Lopes, C., Loingtier, J-M., Irwin, J., 1997. ‘Aspect-
oriented programming’. In Mehmet Aksit and
Satoshi Matsuoka, editors, European Conference on
Object-oriented Programming, Vol 1241 of Lecture
Notes in Computer Science, 220–242. Springer.
Klein, F., Bourjot, C, Chevrier, V., 2009. ‘Contribution to
the Control of a MAS's Global Behaviour:
Reinforcement Learning Tools’. Alexander Artikis and
Gauthier Picard and Laurent Vercouter. Engineering
Societies in the Agents World IX - 9th International
Workshop, ESAW 2008, Saint-Etienne, France,
September 24-26, 2008, Revised Selected Papers, 5485,
Springer-Verlag Berlin Heidelberg, P.173-190, Lecture
Notes in Computer Science, 978-3-642-02561-7.
<10.1007/978-3-642-02562-410>. <inria-00400348>
Laddad, R., 2009. ‘AspectJ in Action’ . Enterprise AOP
with Spring Applications. Manning, 2nd edition.
Liang, S., Viswanathan, D., 1999. ‘Comprehensive
profiling support in the Java Virtual Machine’.
Proceedings of the USENIX Conference On Object
Oriented Technologies and Systems. USENIX
Association: Berkeley, CA, 229–240.
López, F., 2003 ‘Social Power and Norms : Impact on agent
behaviour’. PhD thesis, Univ. of Southampton.
Mansour, S., Ferber, J., 2007. ‘Agent Groupe Role‚ et
Service: Un modèle organisationnel pour les systèmes
multi-agents ouverts’. JFSMA07.
O’Hair, K., 2006. ‘The JVMPI transition to JVMTI’.
http://java. sun.com/developer /technicalArticles/
Programming/jv mpitransition/.
Paes, R., Carvalho, G.R., Lucena, C.J.P., Alencar, P.S.C.,
Almeida, H.O., Silva, V.T. 2005a. ‘Specifying Laws in
Open Multi-Agent Systems’. In Agents, Norms and
Institutions for Regulated Multi-agent Systems
(ANIREM), AAMAS.
Sarrab, M. 2015. ‘Bytecode instrumentation mechanism for
monitoring mobile application information flow’. In
International Journal on Security and Networks, 10(3).
Silva, V., Duran, F., Guedes, J., & Lucena, C. 2007.
‘Governing multi-agent systems’. Journal of Brazilian
Computer Society. Special Issue in Software
engineering for multi-agent systems, 13(2).
Vercouter L., 2000. ‘A Distributed Approach to Design
Open Multi-agent Systems’. In 2nd International
Workshop Engineering Societies in the Agents' World
(ESAW).
Vercouter, L., Muller, G., 2010. ‘L.I.A.R.: Achieving social
control in open and decentralized multiagent systems’.
Applied Artificial Intelligence: An International
Journal, 24(8), 723-768, DOI: 10.1080/
08839514.2010.499502.
Wang, Q., Gao, H., Alsaadi, F and Hayat, T. 2014. ‘An
overview of consensus problems in constrained multi-
agent coordination’. Systems Science and Control
Engineering, 2(1), 275.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
274
