
Soft Variable Structure Control in Sampled-Data Systems with
Saturating Input
Przemysław Ignaciuk and Michał Morawski
Institute of Information Technology, Lodz University of Technology, 215 Wólczańska St., 90-924 Łódź, Poland
Keywords: Nonlinear Control, Sampled-Data Systems, Variable Structure Control, Actuator Saturation.
Abstract: In the effort to achieve high convergence rate, at the same time avoiding implementation difficulties and
poor robustness of time-optimal controllers, the concept of soft Variable Structure Control (VSC) may be
applied. The classical formulation of soft VSC in continuous time domain assumes smooth switching among
an infinite number of controllers. Since nowadays control laws are implemented digitally, changing the
control structure is limited to sampling instances, which leads to quasi-soft VSC. The paper investigates
how the favourable characteristics of dynamic soft VSC can be extended to input-constrained systems with
finite sampling. The design procedure and stability analysis are conducted directly in discrete time domain.
The resulting nonlinear control law is synthesised into a form substantially different from its continuous-
time counterpart. However, smooth control action and fast convergence of continuous soft VSC is retained.
The properties of the obtained control system are formally proved and confirmed experimentally.
1 INTRODUCTION
A combination of two or more control structures
with switching logic results in new properties in thus
formed variable structure control (VSC) system. As
an example, one may consider two unstable systems
which, when joint by an appropriate switching
strategy, ensure asymptotic convergence to
equilibrium (Utkin, 1977). Depending on the design
requirements, the emphasis may be placed on
different aspects and properties of the VSC system.
When robustness is of primary importance (with
the quality of generated control signal a secondary
objective), a popular approach is to introduce a high-
gain switching element and create a sliding-mode
control system. Once the system enters the sliding
phase, any deviation from the prescribed manifold in
the state space is compensated, yielding insensitivity
to matched perturbations under ideal operating
conditions. In practice, physical limitations do not
permit achieving ideal sliding motion, yet high level
of robustness can be achieved. Special
considerations, however, need to be taken to
mitigate the impact of chattering – unfavourable
high-rate input oscillations that are destructive for
mechanical components and inefficient from the
point of energy budget (Lee and Utkin, 2007).
When a smooth control action becomes a
priority, a different class of VSC systems may be
considered. In particular, if high regulation rates are
desired, one can apply the concept of soft VSC
(Adamy and Flemming, 2004). Unlike sliding-mode
control that relies on infinitely fast switching
between a finite number of control configurations, in
soft VSC, an infinite number of cooperating
controllers is used in the effort to attain fast
convergence to equilibrium. The input signal
evolves smoothly within the range permitted by
constraints.
The soft VSC was originally developed for
continuous-time systems (Adamy and Flemming,
2004), and later explored also in continuous time
domain (Lens et al., 2011; Kefferpütz et al., 2013;
Liu et al., 2015). In now commonly applied digital
control realizations (Ignaciuk and Bartoszewicz,
2011; Ignaciuk and Morawski, 2014), however, it is
not possible to obtain switching at infinite rate. The
smoothness of control structure transitions in
discrete-time implementation of soft VSC is
restricted by the sequence of sampling instants. In
this paper, the design issues of soft variable structure
controllers for sampled-data systems are considered.
Although infinite switching rate among the control
structures is not possible, the obtained quasi-soft
VSC scheme ensures fast convergence to
Ignaciuk, P. and Morawski, M.
Soft Variable Structure Control in Sampled-Data Systems with Saturating Input.
DOI: 10.5220/0006001205450550
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 1, pages 545-550
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
545
equilibrium with smoothly varying input signal. The
closed-loop stability and control signal constraints
are addressed explicitly and properties of the quasi-
soft VSC system are formally demonstrated within
discrete-time framework. The theoretical content is
supported by experimental study – stabilization of an
inverted pendulum-on-a-cart system.
2 PROBLEM SETTING
Let t = 0, 1, 2, ... denote subsequent time instants in
a system sampled with period T
s
. The system
dynamics are given by
[( 1) ] ( ) ( ),
sss
tT tT utT+= +xAxb
(1)
where x ∈ ℝ
n
is the state vector, u ∈ ℝ is the input
vector, A ∈ ℝ
n×n
and b ∈ ℝ
n
for n ∈ ℕ
+
. The initial
state x
0
= x(0) belongs to a bounded set X
0
. For
notational brevity, the independent variable tT
s
will
be written shortly as t in a latter part of the text.
The control input needs to obey the constraint
0
|| ,uu≤
(2)
u
0
> 0. It is assumed that the control system is
feasible, i.e. there exists control satisfying (2) that
can bring any x
0
∈ X
0
to 0. Equivalently, one may
consider only a (nonempty) set of points X
0
for
which control system (1)–(2) is stabilizable (Hu and
Lin, 2001).
3 SOFT VSC FOR
SAMPLED-DATA SYSTEMS
3.1 Soft VSC Concept
When the linear control u(t) = kx(t) with a fixed gain
k ∈ ℝ
1×n
is applied to system (1), the convergence
rate decreases as ||x||, ||⋅|| denoting the Euclidean
norm, approaches zero. In order to speed up the
performance, a nonlinear strategy, e.g. time-optimal
control, can be used. However, time-optimal
controllers, besides difficulties in obtaining
convenient form in sampled-data systems (Gao,
2004), imply sudden changes of the control input at
the extremity of allowed interval (2).
The idea behind soft VSC is to adjust the control
system dynamics by smoothly changing the control
structure so that high regulatory rate is maintained
throughout the whole movement from x
0
to
equilibrium. However, unlike continuous-time
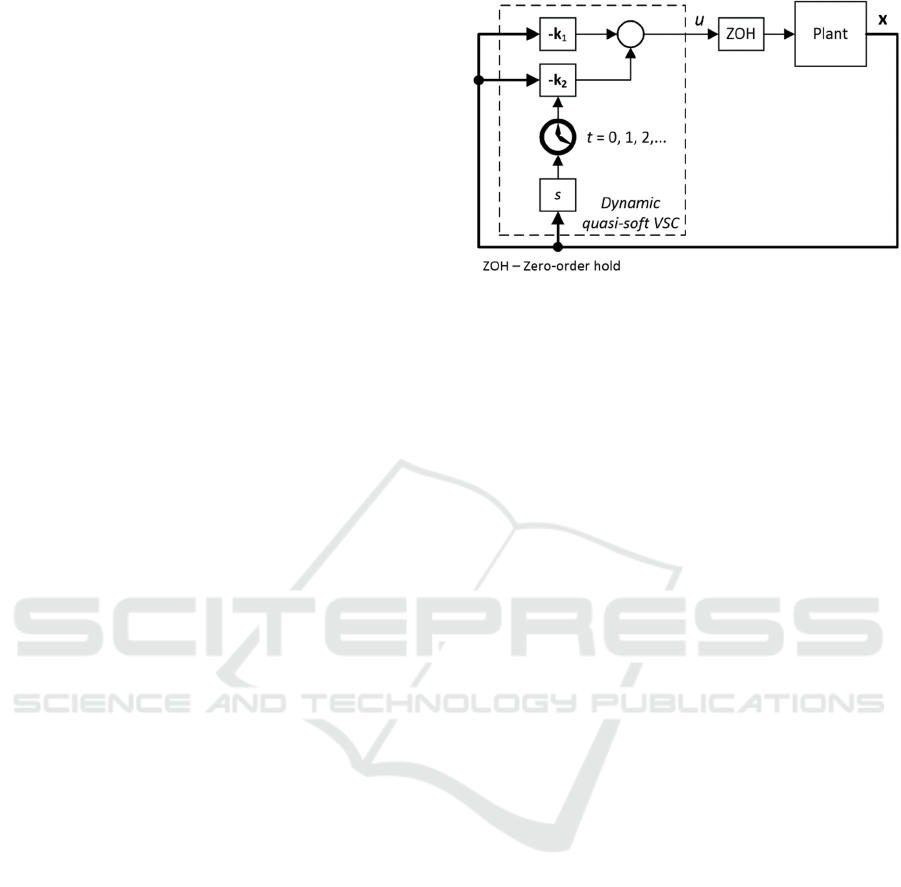
Figure 1: Dynamic soft VSC in sampled-data systems.
systems, discrete-time implementation does not
permit adapting the control structure infinitely fast.
The inherent characteristics of discrete-time control
call for special treatment to retain the desirable
properties of soft VSC systems.
3.2 Quasi-soft VSC
The analysed dynamic VSC system is illustrated in
Fig. 1. The control structure comprises two sub-
controllers and selection logic that governs the
overall gain adjustment. The input is determined as
12
() [ () ] (),ut st t=− +kkx
(3)
where k
1
, k
2
∈ ℝ
1×n
are the control gains and
s(t) ∈ ℝ is the selection variable used for gain
adaptation. The controller design amounts to
choosing suitable vectors k
1
and k
2
, and function
s(t).
The closed-loop system under control (3)
becomes
12
12
(1)[ () ]()
[()]()
tstt
st t
+= − −
=−
xAbkbkx
Abkx
(4)
with gain k
1
to be selected so that A
1
= A – bk
1
is
stable and good closed-loop performance is
achieved.
The system is required to have a single
(asymptotically) stable equilibrium point
.
0s
⎡⎤ ⎡⎤
=
⎢⎥ ⎢⎥
⎣⎦ ⎣⎦
x0
(5)
3.3 Selection Strategy
A possible choice of selection variable s(t) so that
(5) is the unique stable equilibrium for system (4) is
given in the following theorem.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
546

Theorem 1. If there exist positive definite
matrices P, Q, and R ∈ ℝ
n×n
satisfying
11
(),
T
−=− +APA P Q R
(6)
for A
1
= A – bk
1
, and the selection strategy is
chosen as
2
12
2
22
(1) (),
1
() () ()[ 2 ()
() ] ()
TT
TT
st rt
rt ws t t st
v
st t
+=
=+ +
−
xR APbk
kbPbk x
(7)
with v > 0, 0 < w < 1, and R adjusted so that r(t) ≥ 0,
then (5) is the stable equilibrium of system (4).
Proof. Consider the Lyapunov function candidate
2
() () () ().
T
Vt t t vs t=+xPx
(8)
Since P is positive definite and v positive,
V(t) > 0 for t > 0 and V = 0 at equilibrium (5).
Therefore, in order for (8) to be a Lyapunov function
for system (4), the forward difference
() ( 1) ()Vt Vt VtΔ=+−
(9)
needs to be negative along the state trajectory.
Using (4) and (8), ΔV becomes
2
2
1212
22
22
11
12 2 1
2
22
() ( 1) ( 1) ( 1)
() () ()
()[()][()]()
(1) ()() ()
()[ ] () ( 1) ()
()[ () ()( )
()( ) ] ()
T
T
TT
T
TT
TT T
T
Vt t t vs t
ttvst
tst st t
vs t t t vs t
ttvstvst
tst st
st t
Δ=+ ++ +
−−
=− −
++− −
=−++−
+− −
+
xPx
xPx
x A bk P A bk x
xPx
xAPAPx
xAPbkbkPA
bk Pbk x
22
11
2
12 2 2
()[ ] () ( 1) ()
()[ 2() () ] ().
TT
TT TT
ttvstvst
tst st t
=−++−
+− +
xAPAPx
xAPbkkbPbkx
(10)
Substituting (7) for s
2
(t + 1) in (10), yields
11
2
() ()[ ] () () ()
(1 ) ( ).
TT T
Vt t t t t
wvs t
Δ= − +
−−
xAPAPxxRx
(11)
Since v > 0 and 0 < w < 1, using assumption (6)
leads to
2
() () () (1 ) () 0.
T
Vt t t wvs tΔ=− −− <xQx
(12)
Consequently, since ΔV(t) < 0, V(t) given by (8) is a
Lyapunov function for system (4), and the system is
stable.
Note that for a stable matrix A
1
(whose
eigenvalues can be moved into the open unit disc by
proper selection of vector k
1
), (6) represents a
Lyapunov equation with positive definite solution P
obtained for arbitrary positive definite matrix Q + R.
Thus, since the sum of positive definite matrices is
positive definite, one can always find positive
definite matrices P, Q, and R satisfying relation (6).
On the other hand, for sufficiently large R and v one
can guarantee that the expression under the square
root in (7) will be nonnegative, which results in a
feasible function s(t). Q can be arbitrary, e.g. an
identity matrix.
3.4 Actuator Saturation
The selection variable needs to be chosen in such a
way that the closed-loop system is stable, and input
constraint (2) is satisfied at all times. Directly from
(3), it follows that condition (2) is met whenever
01 20
[()],ustu−≤− + ≤kkx
(13)
which is equivalent to the pair of inequalities
01 01
2
22
01 01
2
22
( ) for 0,
( ) for 0.
uu
st
uu
st
−− −
≤≤ >
−−−
≤≤ <
kx kx
kx
kx kx
kx kx
kx
kx kx
(14)
When x approaches the equilibrium thus formed
bounds extend to infinity. Therefore s should be
further limited as
0
|()|
s
ts≤
(15)
with s
0
being a positive constant. Combining (14)
and (15) one arrives at
() () ()
LU
ssts≤≤xx
(16)
where
01 01
2
20
01 01
02
00
01 01
2
20
,,
() , ,
,,
L
uu
s
uu
ss
ss
uu
s
⎧
−−+
≤
⎪
⎪
⎪
−+ +
⎪
=− <<
⎨
⎪
⎪
−− +
≥
⎪
⎪
⎩
kx kx
kx
kx
kx kx
xkx
kx kx
kx
kx
(17)
and
Soft Variable Structure Control in Sampled-Data Systems with Saturating Input
547

01 01
2
20
01 01
02
00
01 01
2
20
,,
() , ,
,.
U
uu
s
uu
ss
ss
uu
s
⎧
−− −−
≤
⎪
⎪
⎪
−− −
⎪
=<<
⎨
⎪
⎪
−−
≥
⎪
⎪
⎩
kx kx
kx
kx
kx kx
xkx
kx kx
kx
kx
(18)
Theorem 2. If there exist positive definite
matrices P, Q, and R satisfying (6) with R and v
adjusted so that r(t) given by (7) is nonnegative, then
the selection strategy
(1) (,)(),
s
trrt
μ
+= x (19)
with
()
,sgn[()](),
( , ) sgn[ ( )], ( ) sgn[ ( )] ( ),
()
,sgn[()] (),
L
L
LU
U
U
s
st r s
r
rstsstrs
s
st r s
r
μ
⎧
≤
⎪
⎪
⎪
=<<
⎨
⎪
⎪
≥
⎪
⎩
x
x
xx x
x
x
(20)
s
L
(x) and s
U
(x) given by (17) and (18), and
1, 0,
sgn( )
1, 0.
s
s
s
−≤
⎧
=
⎨
>
⎩
(21)
stabilises system (4) at equilibrium (5) while
upholding input constraint (2).
Proof. First, note that (20) makes s given by (19)
confined to interval (16), which is equivalent to the
constraint |u| ≤ u
0
.
Consider the Lyapunov function candidate
2
2
() () () (),
T
v
Vt t t s t
μ
=+xPx
(22)
Since
P is positive definite and v positive,
V(t) > 0 for t > 0 and V = 0 at equilibrium (5). Using
(4) and (19), the forward difference
2
11
2
2
12 2 2
22
11
2
()
()[ ] () () ()
()[ 2 () () ] ()
()[ ] () () (),
TT
TT TT
TT
Vt
v
ttvrtst
tst st t
v
t t vwst st
μ
μ
Δ
=−+−
+− +
=−++−
xAPAPx
xAPbkkbPbkx
xAPAPRx
(23)
which after applying (6) becomes
22
() () () (1/ ) ().
T
Vt t t wvs t
μ
Δ=− − −xQx
(24)
Since v > 0, for sufficiently small w > 0, ΔV(t) < 0,
and closed-loop system (4) with input constraint (2)
is Lyapunov stable.
3.5 Convergence
It remains to be determined whether the control
system governed by the soft VSC strategy indeed
results in faster convergence than a linear scheme
with one controller. Note that
122 2
2
|( 1)|| ()|
12
()[ ] ().
()
()
TTTT
st st
wt t
vst
st
μ
+= ×
++−
R
xAPbkkbPbkx
(25)
Assume |s| to be initially small (and disregard the
saturation effect). Then, the first term dominates the
quadratic form under the square root and |s| grows as
2
1
|( 1)||()| () ()
()
T
s
tstw tt
vs t
+≅ + xRx
(26)
providing increasingly faster decrease of V
according to (12). In consequence, the trajectory
approaches the origin at a faster rate than in the case
of static-gain linear control.
On the other hand, at the conclusion of the
regulation process, as x approaches zero,
|( 1)||()| .
s
tstw+≅ (27)
Since w < 1, |s| reduces to zero as well, effectively
leaving the system regulated by k
1
(which ensures
stable performance by definition).
4 EXPERIMENTAL STUDY
The controlled plant, illustrated in Fig. 1, reflects a
structurally unstable 4th-order inverted pendulum-
on-a-cart system. The plant parameters are as
follows: mass of the cart 0.768 [kg], mass of the
pendulum 0.064 [kg], moment of inertia (around the
centre of gravity) 0.00231 [kg⋅m
2
], and distance
between the pendulum gravity centre and the shaft
0.205 [m]. For the purpose of controller design a
linearized plant model is considered – the neglected
friction, nonlinearities, and actuator dynamics
constitute the plant uncertainty. Thus obtained
nominal plant dynamics are given by
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
548

01 0 0 0
0 0 0.291 0 1.166
,
00 0 1 0
0 0 27.984 0 3.429
u
⎡⎤⎡⎤
⎢⎥⎢⎥
⎢⎥⎢⎥
=+
⎢⎥⎢⎥
⎢⎥⎢⎥
−
⎣⎦⎣⎦
xx
(28)
where x = [x
1
... x
4
]
T
with x
1
– cart position, x
2
– cart
velocity, x
3
– pendulum angular position, and x
4
–
pendulum angular velocity. Input u is the motor
driving force adjusted through a PWM wave
generated from a microcontroller unit. The position
of the cart and pendulum is obtained from
incremental encoders with 1024 impulses per
rotation. The remaining state variables – the cart and
pendulum velocities – are determined from (noisy)
position measurements using a differentiating filter
with coefficients [1, –1]. Sampling time is set to
T
s
= 10 ms. The input constraint |u| ≤ 6.
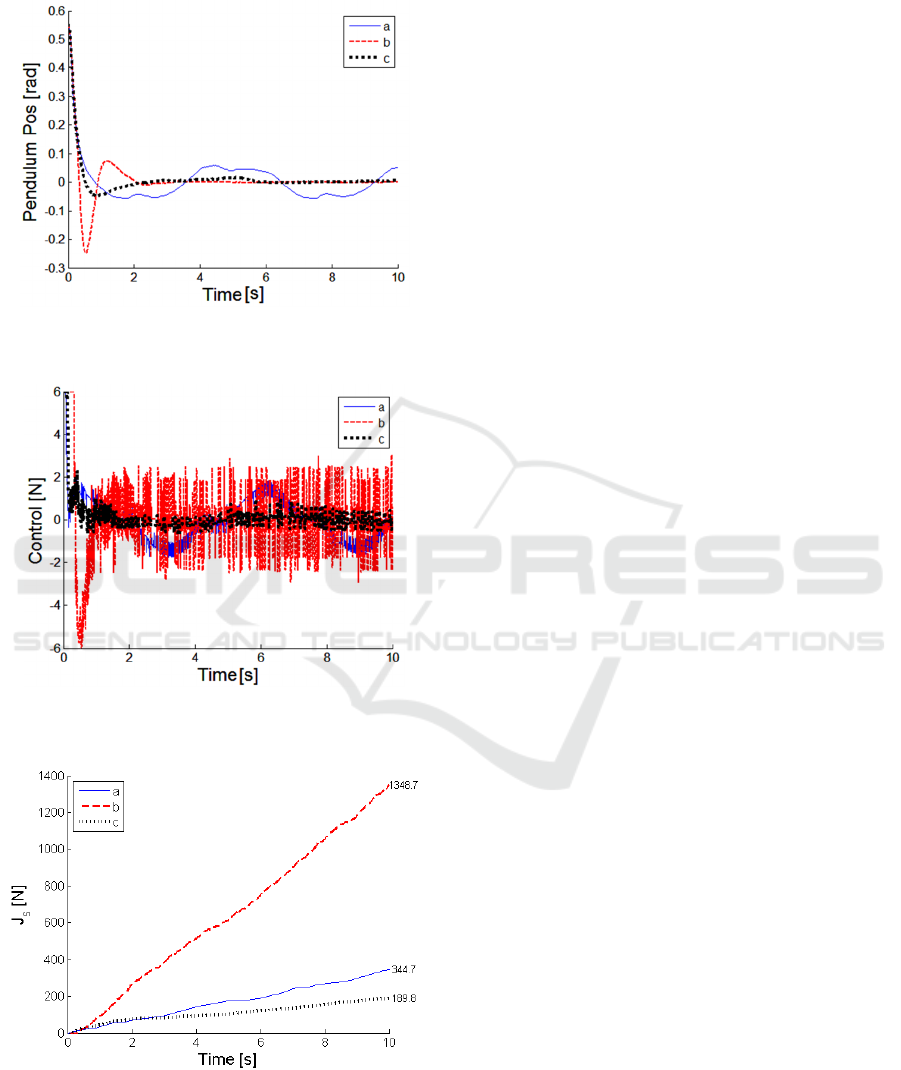
Performance of three control strategies is
compared:
a)
linear controller u(t) = – kx(t) with the gain
adjusted as k = [1.83, 2.58, 22.25, 4.12]. This
setting corresponds to the closed-loop
eigenvalues λ
∗
= 0.98 that yield the shortest
transient time without violating the input
constraint so that the system stabilizes in spite of
uncertainties;
b)
fast controller with saturation limiting the input
to interval [–6, 6] [N] with the gain, set as
k = [38.52, 25.10, 81.76, 15.27], that
corresponds to the closed-loop eigenvalues
λ
∗
= 0.94 in the linear region. The gain is selected
so that the fastest convergence permitted by
modelling inaccuracy and saturation nonlinearity
is achieved;
c)
dynamic quasi-soft VSC (3) with selection
strategy (19): the control gains k
1
= [0.15, 0.40,
12.11, 1.91] (closed-loop eigenvalues λ
∗
= 0.985)
and k
2
= [12.19, 10.65, 46.69, 8.74] (closed-loop
eigenvalues λ
∗
= 0.955), s
0
= 100, v = 100,
w = 0.9, R = diag{0.2, 1, 0.2, 1}.
The cart is initially at rest with the pendulum
diverted from the upper unstable equilibrium by 30°
(which further strains the test owing to larger
inaccuracy in plant model linearization). The
objective is to drive the state to zero.
The system output (pendulum position) is plotted
in Fig. 3 and the corresponding input signal in
Fig. 4. All three controllers bring the output to the
vicinity of zero. As expected, the slowest
convergence is attained by the linear controller,
which also results in the largest limit cycle induced
by the nonlinearities of the physical plant. The
saturating and quasi-soft VSC strategies achieve
Figure 2: Experimental setup: A – inverted pendulum
mounted on cart E; B – motor; C – signal manipulation
device; D – microcontroller unit with the control logic.
similar convergence time with smaller overshoot
exhibited by the latter. The quasi-soft VSC shows
much improvement over the linear scheme in terms
of convergence, at the same time avoiding
oscillatory input generated by the saturating
controller. The smoothness of input signal quantified
through J
s
(t) =
1
0
(1) ()
t
i
ui ui
−
=
+−
∑
, is illustrated in
Fig. 5.
5 CONCLUSIONS
The paper investigates application of soft VSC
concept in sampled-data control systems with
saturating input. Unlike the classical continuous-
time formulation, the control action is adjusted at
finite intervals permitted by the sampling period,
which results in quasi-soft behaviour. The presented
design procedure, specific to discrete-time systems,
allows one to preserve the favourable properties of
continuous-time VSC. In particular, the quasi-soft
VSC combines the benefits of fast convergence and
smooth control signals, leading to an attractive
solution to be implemented in digital control systems
with magnitude-constrained inputs.
ACKNOWLEDGEMENTS
This work has been performed in the framework of
project no. 0156/IP2/2015/73, 2015–2017, under
“Iuventus Plus” program of the Polish Ministry of
Science and Higher Education. P. Ignaciuk holds the
Soft Variable Structure Control in Sampled-Data Systems with Saturating Input
549
Ministry Scholarship for Outstanding Young
Researchers.
Figure 3: Pendulum angular position: a) linear, b)
saturating, c) soft VSC strategy.
Figure 4:
Control input
:
a) linear, b) saturating, c) soft
VSC strategy.
Figure 5: Input s
moothness
:
a) linear, b) saturating, c)
soft VSC strategy.
REFERENCES
Adamy, J., Flemming, A. 2004. Soft variable-structure
controls: a survey. Automatica 40(11): 1821-1844.
Gao, Z. 2004. On discrete time optimal control: a closed-
form solution. In American Control Conference,
Boston, MA, USA, 52-58.
Hu, T., Lin, Z. 2001. Control Systems with Actuator
Saturation. Boston: Birkhäuser.
Ignaciuk, P., Bartoszewicz, A. 2011. Discrete-time
sliding-mode congestion control in multisource
communication networks with time-varying delay.
IEEE Transactions on Control Systems Technology
19(4): 852-867.
Ignaciuk, P., Morawski, M. 2014. Linear-quadratic
optimization in discrete-time control of dynamic plants
operated with delay over communication network. In
Mediterranean Conference on Control and
Automation, Palermo, Italy, 412-417.
Kefferpütz, K., Fischer, B., Adamy, J. 2013 A nonlinear
controller for input amplitude and rate constrained
linear systems. IEEE Transactions on Automatic
Control 58(10): 2693-2697.
Lee, H., Utkin, V.I. 2007. Chattering suppression methods
in sliding mode control systems. Annual Reviews in
Control 31(2): 179-188.
Lens, H., Adamy, J., Domont-Yankulova, D. 2011. A fast
nonlinear control method for linear systems with input
saturation. Automatica 47(4): 857-860.
Liu, Y., Kao, Y., Gu, S., Karimi, H.R. 2015. Soft variable
structure controller design for singular systems.
Journal of The Franklin Institute 352(4): 1613-1626.
Utkin, V.I. 1997. Variable structure systems with sliding
modes. IEEE Transactions on Automatic Control
22(2): 212-222.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
550
