
Exploration of Unknown Map for Gas Searching and Picking Up Objects
using Khepera Mobile Robots
Sara Ashry Mohammed
1,3
and Walid Gomaa
1,2
1
Cyber-Physical Systems Lab (CPS), Computer Science and Engineering (CSE),
Egypt-Japan University of Science and Technology (E-JUST), Alexandria, Egypt
2
Faculty of Engineering, Alexandria University, Alexandria, Egypt
3
Computers and Systems Department, Electronic Research Institute (ERI), Giza, Egypt
Keywords:
Mobile Robots, Explore Unknown Map, Gas Detection, V-REP, Khepera III, Albers Algorithm.
Abstract:
In this paper, the integrated approach for searching, detecting the source of gas leakage and capturing object
using Khepera III mobile robot is introduced. It was tested in natural grid environments as shown in experi-
ments but it is usable in vast areas; e.g. houses and labs to pick up gas victims. Experiments are performed
using a master Khepera robot equipped with a gas sensor and two slave robots equipped with grippers to take
the best path to pick up the object. Moreover, this paper proposes an improvement of Albers exploration algo-
rithm to reduce the time required to explore an unknown map with different polygon obstacles. The proposed
approach aims at minimizing the overall exploration time, making it possible to localize gas source in an effi-
cient way, as demonstrated in V-REP simulation as well as real world experiments. A comparison among both
algorithms has shown the effectiveness of the proposed one, where the percentage of performance speedup is
about 30% to 57% depending on the size of the map and number of obstacles.
1 INTRODUCTION
Nowadays, using robots instead of humans in risk op-
erations is an interesting point in the field of robotics.
Autonomous Robots are typically designed to per-
form search operations in buildings, mines, and caves,
which are considered extremely challenging complex
environments. One of the first such challenges is the
exploration of the environment. Robotic exploration
is an online problem for map building in which mo-
bile robots use their onboard sensors to discover grad-
ually the physical and layout structure of the initially
unknown environment.
The Evaluation of the current experimental explo-
ration methods is solely based on relative compar-
isons between the robots’ performance in some test
environments (Amigoni, 2008). Subsequently, it is
hard to evaluate the room size is available for improv-
ing on-line exploration strategies. The Whole com-
parison between on-line exploration strategies and op-
timal off-line performance in test maps is needed. It
can be done based on the competitive ratio. Mainly,
the competitive ratio is P
a
/P
o
of the on-line algorithm
A, where P
a
is the performance of A in a test envi-
ronment while P
o
is the performance of the offline al-
gorithm which has knowledge of the map (Ghosh and
Klein, 2010). Lots of studies have been done in map-
ping and exploration; see for example, (Higashikawa
and Katoh, 2013), (Herrmann et al., 2010), (Icking
et al., 2010) and, (Doriya et al., 2015).
Recently, It received looking for olfactory targets
with mobile robots a great interest because of its im-
portance in the detection of a chemical leak, and
search and rescue operations. Many studies have been
done in this field in (Marjovi and Marques, 2011) and
(Le Comte et al., 2012). In this paper, map explo-
ration and gas source detection are the main topics.
In the following discussion, we focus on improv-
ing Albers exploration algorithm to explore unknown
grid maps with obstacles for detecting gas leakage
source. Then, take the optimal path to the target nodes
(potential victims). The motivation of this work is to
give an explanatory prototype of a robotic system that
saves people from fires and bottlenecks resulting from
gas leakage and the potential ignition of fires. Us-
ing a multi-robot system in risk operations instead of
firefighters ensures the safety of their lives and helps
them to perform harder tasks. Motion planning is im-
plemented on two various levels: sensor based and
model based. At the model level (Bender et al., 2002),
294
Mohammed, S. and Gomaa, W.
Exploration of Unknown Map for Gas Searching and Picking Up Objects using Khepera Mobile Robots.
DOI: 10.5220/0005978402940302
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 294-302
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

planning depends on a priori knowledge of the envi-
ronment. There is a need to search for free paths be-
tween certain start and goal states. The Sensor path
planners deal with the unexpected items in the scene
and usually, they are perfect for obstacle avoidance
using robot sensors. Both models are employed in
our work where a sensor based module is utilized by
a master Khepera robot which is supplied with a gas
sensor circuit, and a model based module is used by
two slaves Khepera robots as shown in Section 4.
The paper is organized as follows. Section 1 is an
introduction. Section 2 gives the related work. Al-
bers algorithm is discussed in section 3. Section 4
describes the Khepera III robot and the types of used
sensors. Our proposed framework and algorithm are
also introduced. Section 5 shows the accuracy of our
approach in both real world and simulation experi-
ments. Section 6 concludes the paper.
2 RELATED WORK
Most of the research work on the single-robot explo-
ration of new maps relied on grid map using sensor
model. A Robot should construct a whole map us-
ing the shortest path as much as possible. This prob-
lem was studied previously by many researchers, e.g.,
(Betke et al., 1995), and (Rivest et al., 2015). The
general problem of exploring a room without obsta-
cles with a competitive ratio of examining places with
obstacles was introduced by (Deng et al., 1998). For
a simple polygon, (Hoffmann et al., 2001) achieved a
constant competitive ratio of c= 26.55, while (Albers
et al., 2002) showed that constant competitive factor
for maps with obstacles does not exist (Fekete and
Schmidt, 2010). For rectilinear polygons, (Hammar
et al., 2006) showed that the traveled distance accord-
ing to the Manhattan metric is c= 1.50 in the case of
having a starting point on the boundary. The original
Ray algorithm to explore grids with rectangular ob-
stacles is proposed by (Betke et al., 1995). In contrast
(Albers et al., 2002) proposed an algorithm for ex-
ploring grids with arbitrary obstacles. We improved
Albers algorithm with an average competitive ratio of
(c= 1.35), but there is no a constant competitive ratio.
A Wireless Sensor Network (WSN) of an olfac-
tion mobile robot to localize the odor source was
suggested by (Qi et al., 2015). (IS¸ILAK, 2010) De-
signed WSN to detect gas leakage and warns person
with sound and vibration especially for people of Al-
Zheimer disease who are more likely to forget to close
the gas in the kitchen. WSN based on smart home
for elder people to provide them with a safe living
was developed by (Ransing and Rajput, 2015). Res-
cue operation in mines is risky so (Chakkath et al.,
2012) proposed a prototype of a mobile robot with
a gas sensor, temperature sensor, and camera which
transmit the live video signal to monitor the status
in a tunnel. (Kim et al., 2015) proposed a method
to improve object identification and also complement
sensor drawbacks of the infrared and radar sensor for
imaging through smoke by firefighter robot.
3 BACKGROUND
Albers Algorithm
Albers algorithm (Albers et al., 2002) can be called
Lower Ray Traversal Algorithm (LRT) to be easily
distinguished from the newly proposed one. The al-
gorithm assumed that the outer boundary of the grid
is rectangular and that no obstacles touch the outer
boundary. The LRT algorithm is summarized as:
1) The robot starts from point x
1
and moves along
the exterior boundary of the scene clockwise until it
reaches x
1
again. By this, the robot could know the di-
mension of the map and determine the exterior lower
open segment. 2) Let S be the lower open segment
of the exterior boundary. A Lower Open Segment of
any obstacle O is a maximal sequence of consecutive
horizontal edges on the boundary of O so that the inte-
rior of O is south of the robot. Fig. 1 shows the lower
open segment in the bold lines of the grid map with ar-
bitrary obstacles. 3) Start from node x
i+1
on the open
segment S to move up in vertical ray on the northern
direction until hitting the exterior boundary. Then, go
south till hitting the open segment and go one step
east on the segment and radiate another Up-Ray in a
recursive operation till hitting the exterior boundary
or obstacle O at point X . 4) If the up ray hits an ob-
stacle O, then go around the boundary of the obstacle
in a clockwise manner, detect the open segment of O
till it reaches X again Then take the shortest path to
the first point on the segment and recursively do ray
traversal to continue exploring. If the robot faces an-
other obstacle at Y , repeat the same processes. It goes
for any new obstacle till exploring the latest obstacle,
then go back to explore the uncompleted open seg-
ment of previous constraints and so on till all the map
is entirely scanned as shown in figure 2. The obstacle
is planned thoroughly if all the nodes are explored.
A significant advantage of the ray algorithm is that
it applies the depth-first search strategy (DFS) which
traverses all edges and guarantees drawing a complete
map. However, Albers algorithm has some draw-
backs including the following: 1) The robot traverses
the same vertical ray twice because it goes up and
Exploration of Unknown Map for Gas Searching and Picking Up Objects using Khepera Mobile Robots
295

Figure 1: Left picture indicate open segment while right
picture indicate grid map with arbitrary obstacles.
Figure 2: The Lower Ray Traversal Algorithm.
Figure 3: Exploring areas in non-ordered sections at 13, 14.
down on the same line to hit the lower open segment.
Hence, this algorithm doubles the time of exploration.
The newly proposed algorithm enhances this draw-
back; see section 4.2. 2) In case, the environment
is occupied by multiple obstacles, the segment of the
last obstacle is completely explored before the previ-
ous ones which mean that the robot would go back
till the first obstacle is thoroughly explored which al-
lows some horizontal edges to be traversed more than
twice. This leads to exploring the map in a non-
ordered way where region 13 explored before region
14 as shown in figure 3.
4 PROPOSED APPROACH
In this section, we introduce the methodology of an
integrated approach to detect sources of gas leakage
and capture objects using mobile robots. Beides, we
propose an improvement to Albers algorithm.
4.1 Search and Picking Up Objects
Map exploration, gas source detection and picking up
objects (potential gas leakage victim) using Khepera
III robot are the main ideas in this paper. We de-
veloped a prototype integrated approach for the pur-
pose of saving people from gas bottlenecks where the
multi robot system consists of one master robot (R1)
equipped with the gas sensor to search a rectangular
grid map using our proposed zigzag ray traversal al-
gorithm and detects the source of gas leakage. Then,
It sends the environment map and the target point (ob-
ject found beside gas source node) to two slave robots
(R2,R3) by an intermediate computer with Ubuntu
12.04 operating system. Slave robots receive the map
as well as the target point from the an intermediate
computer through a Wireless compact flash card Wi-
fi B/G: Ambicom WL5400G-CF module for network
connection. They equipped with grippers to capture
the object in the face to face.
In experiments in section 5, the two robots took
the Dijkstra shortest path algorithm (E.W.Dijkstra,
1959) to the target point as shown in figure 8. R3
took the same path of R2 as it is the shortest one but
it’s path was increased with last three steps to face
R2. R3 was delayed with an edge from R2 to avoid
the collision between them. R2 reached before the
object with a node and then checked arriving of R3
each time by using three front ultrasound sensor with
threshold (T ≤ 55) where T is the edge length in cen-
timeter. R2 waited until R3 reach after the object with
a node in a face to face position. Then, both of them
began together to open the fingers of the gripper, fall
to touch the ground, catch the object and go up.
4.2 Zigzag Ray Traversal Algorithm
(Proposed Algorithm)
Let’s call this algorithm lower upper ray traversal
(LURT) which avoids the defects of the previous
algorithm (LRT). The outline of the proposed LURT
algorithm is explained in details in the following
steps: 1) Start from any point on the corner of the
map (e.g. x
i
) and move along the exterior boundary
of the scene until the robot reaches to x
i
again. 2)
Let S be the upper and lower segments of the outer
boundary where An Upper Segment of any object O
is a consecutive horizontal edges on the boundary of
O so that the interior of O is north of the robot and
Lower Segment is defined in Section 3. Fig. 4 shows
the lower/upper segment in the bold blue/green lines
respectively at the grid map with arbitrary obstacles.
3) Start from node x
i+1
on the lower segment S to
move up in a vertical ray in the northern direction
until hitting the exterior boundary or an obstacle.
When the ray hits the lower/upper exterior segment,
it executes the zigzag process. If the ray hits the
obstacle at point X
1
, then it executes the obstacle
boundary scan and explores segments. 4) At the end
of exploring all obstacles, complete the exploration
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
296

Algorithm 1: Search and capture Object.
switch RobotsState do
case Exploring do
Master robot starts working;
Apply zigzag ray traversal algorithm;
Check gas odor at each node;
if GasOdor == true then
Mark this node as gas source node;
if (ObjectBesideGasOdor == true)
then
Mark this node as a target point;
Send the environment map and the
target point to slave robots using
an intermediary computer;
Move the master robot to final
corner on the boundary;
Stop the master robot;
RobotsState = TakingPath;
case TakingPath do
Slave robots start working;
Apply Dijkstra algorithm;
if (Robot1-ReachTarget == true) &
(Robot2-ReachTarget == true) then
Move gripper down;
Catch Object, move gripper up;
end
by the zigzag traversal process.
The zigzag process can be outlined as follows:
After radiating a ray to the north, move one step in
the east and emit a ray in the reverse direction from
the previous one (up/east/down).
The Obstacle boundary scan can be outlined as
follows: 1) Move around the first obstacle clockwise
until reaching X
1
again. 2) While moving, detect
the up/down obstacle segment, store critical points
(points of rotation) for each segment in a queue and
mark them as visited. 3) After the boundary scan, go
to the first point at the first segment of the obstacle to
execute the exploration process.
The Segment exploration can be outlined as fol-
lows: 1) Start a zigzag ray traversal exploring from
the first point at the first segment detected by the cur-
rent obstacle. After exploring the first segment, move
around the obstacle clockwise and go to the lowest
point of the contiguous segment (lowest sum of x and
y value of this point). 2) If any ray hits a new obstacle,
then execute the boundary scan of the new obstacle,
give priority to the new obstacle to be explored first,
and execute the segment exploration. Recursively, do
that for each new obstacle and then take the short-
est path to the previous uncompleted obstacle to com-
plete exploring. 3) If the ray radiated from any obsta-
cle segment hits a visited point on a previous obstacle
(which its exploring process has not been completed
yet), then swap the priority of the exploration between
the two obstacles to complete exploring the previous
obstacle segments. 4) If the ray reaches the end-lock
state, go in the reverse direction of the same line and
execute a zigzag process. End-lock: If the right or the
left side of the ends of the ray is an obstacle, it ’s hard
to move to move one step east in the zigzag process.
Then, go in the reverse direction.
Figure 4: Zigzag Ray lines and lower/upper segment.
Figure 5: Exploring area in sequence at regions 13 and 14.
The following algorithm is the pusedo code of
Zigzag Ray Traversal where symbols S1 is the left
infrared sensor, S3 is the front sensor and S5 is the
right sensor. Rdir is the robot direction.
The main advantages of the proposed algorithm:
1) Exploring the map totally in (half the duration
achieved by the Albers algorithm + small factor σ ) as
will be showed in Section 5. σ factor is the same equal
time of the exterior boundary travel, obstacles bound-
ary travels and some vertical edge traverse of the two
algorithms. To simply understand the difference be-
tween Albers algorithm and the proposed algorithm:
assume the same map with obstacles as shown in Fig-
ures 2 and 4. The number of rays that passed the map
is 187 in figure 2. In contrast, the number of rays is
102 in figure 4. Thus, the LURT algorithm explores
the map in 0.545 + σ of the LRT. 2) The proposed
algorithm scans the whole map in contiguous areas
mostly as in figure 5. In contrast, Albers algorithm
scans the same map in mostly non-contiguous areas
as shown in figure 3. So, the main feature of the pro-
posed algorithm is saving the time of traversing the
map and saving the energy of the robot’s battery in
Exploration of Unknown Map for Gas Searching and Picking Up Objects using Khepera Mobile Robots
297

Algorithm 2: Zigzag Ray Traversal.
while true do
Execute Zigzag Ray Traversal Algorithm
end
switch state do
case Idle do
state=BoundaryScan
Explore Forward;
case BoundaryScan do
if (x==0) & (y==0) then
state=VerticalSweep
SetMapDimension
Explore Backward, Forward , Left
else if (S3==false) & (S1==true) then
Explore Forward
else if (S3==true) then Explore Right
case ObsMap do
if (x==ObsCell1.x)&(y==ObsCell1.y)
then state=BoundaryTravel
Explore Forward
else if (S3==false)&(S5==false) then
Explore Right, Forward
else if (S3==false) then
if Rdir==Forward then
Map(x+1,y)=obsIndex
if Rdir==Backword then
Map(x-1,y)=obsIndex
if Rdir==Right then
Map(x,y-1)=obsIndex
Fill UpSegment Array
if Rdir==Left then
Map(x,y+1)=obsIndex
Fill DownSegment Array
Explore Forward
else if (S3==true) then
if Rdir==Forward then
Map(x,y+1)=obsIndex
if Rdir==Backword then
Map(x,y-1)=obsIndex
if Rdir==Right then
Map(x+1,y)=obsIndex
Fill UpSegment Array
if Rdir==Left then
Map(x-1,y)=obsIndex
Fill DownSegment Array
Explore Left
case SegmentCheck do
if (Rdir==Right)&(S5==true) then
state=VerticalSweet; ExploreLeft;
else if (Rdir==Right)&(S5==false)
then
state=BoundaryTravel;
ExploreRight
else Explore Nothing
end
Algorithm 3: Complete Zigzag Ray Traversal.
switch state do
case BoundaryTravel do
if (x == ObsCell1.x)&(y ==
ObsCell1.y) then
state=VerticalSweep
Explore Left , Forward
else if (S3==false)&(S5==false) then
Explore Right, Forward
else if (S3==false)&(Rdir==Right)
then
state=SegmentCheck
Explore Forward
else if S3==false then
Explore Forward
else if S3==true then
Explore Left , Forward
case VerticalSweep do
if (S3==false) then Explore Forward
if (S3==true)&(Rdir==Forward) then
if (y≤ vertCells-1) &
Map(x,y+1)==0 then
state=ObsMap
obsIndex++
Map(x,y+1)=obsIndex
obsCell1.x= x
obsCell1.y= y
Explore Left , Forward
else if (S5 ==
true)&(Map(x,y+1)≥ 1) then
Explore Backward
else if (S5 == true)&(y
==vertCells) then
state=Finish
else Explore Right, Forward, Right
if (S3==true)&(Rdir==Backword)
then
if (y≥ 1)&(Map(x,y-1)==0) then
state=ObsMap
obsIndex++
Map(x,y-1)=obsIndex
obsCell1.x=x
obsCell1.y=y
Explore Left , Forward
else if (S1 == true)&(y ==0) then
state=Finish;
else if (S1==true)& Map(x,y-1)≥ 1
then
Explore Backward
else
state=BoundaryTravel
Explore Left , Forward
case Finish do
Explore Halt
Print explore all map
end
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
298

addition to usefulness for critical applications as res-
cue operations.
The disadvantage of the proposed algorithm is
that it needs higher space storage than the LRT to
store critical points for segments of any obstacle. The
storage space is the number of queues needed to store
critical points only. However, the storage cost is very
small compared to the double rays of traversing a map
in the real world.
4.3 Khepera Robot Platform
The Khepera III is a small mobile robot developed
by K-Team, it has two wheels. The features of this
robot could match the performance of much larger
robots. The robot consists of 9 infrared sensors to
detect an obstacle and five ultrasonic sensors to detect
long-range objects. It also has two infrared sensors
on its ground to follow the lines. Moreover, it allows
for expansion using the Korebot II extension board
for any external sensor, camera, or gripper as in figure
7 and 8. C/ C++ programming language are used to
program the robot (Lambercy and Bureau, 2007).
Architecture of the Khepera III Robot: To
reduce the compilation time of running the code on
khepera III processor, the following parameter should
be taken in consideration as explained in (XScale,
2002).
• Processor: Marvell PXA270 with XScale, 7
Stage pipeline and32 KB instruction cache.
• Dynamic Branch Prediction to reduce the penal-
ties of changing the flow of program execution.
• Supports Write-back or write-through caching.
• Loop Unrolling: loop with a fixed number of iter-
ations may be faster if the loop is unrolled rather
than trying to schedule prefetch instructions.
• SDRAM resources are typically: 4 memory
banks, 1 page buffer per bank referencing a 4k ad-
dress range and 4 transfer request buffers.
• Out of Order Completion: instructions may com-
plete out of order because there are no data depen-
dencies exist.
• Use of Bypassing: The pipeline makes extensive
use of bypassing to minimize data hazards. It
allows results forwarding from multiple sources,
eliminating the need to stall the pipeline.The
pipeline issues a single instruction per clock.
Calculate Real Speed in mm: In speed mode, the
controller has a speed value of the wheels as input,
and it controls the motor to keep this speed. The speed
value is a division of a constant factor (16776960) by
the time between encoder pulsations (Lambercy and
Bureau, 2007).
MotorSpeed =
16776960
Timer5value
=
Timer5value
Postscaler
f
osc
4
T mr5Prescaler
(1)
RealSpeed
mm
= ConversionFactor ∗ MotorSpeed
RealSpeed
mm
=
WheelCircumference
Time ∗ 2764
(2)
where ConversionFactor = 6.9439 ∗ 10
−3
, fosc =
20MHz, Tmr5Prescaler = 8, Postscaler = 4, Wheel-
Circumference is 128.8mm and 2764 corresponds to
the number of measures per a wheel revolution.
Odometry Distance and Orientation: The
equations that govern the dynamics of the robot are
as follows.
V =
V
R
+V
L
2
W =
V
R
−V
L
WheelSpacing
θ =
k
∑
i=0
W
i
δt
r =
k
∑
i=0
V
i
δt[−sinθa
x
+ cosθa
y
]
(3)
Where V is the robot’s velocity, V
R
is the velocity of
the right wheel, and V
L
is the left wheel velocity. So
the resultant velocity is the average of the velocities
of the left and right wheels. W is the angular velocity
and WheelSpacing = 88.41mm. θ is the odometer
angle orientation, and r is the odometer distance, δt
is the timestamp difference, the a
x
is X direction, a
y
is Y direction.
The Direction of the Robot is Relative to its Initial
Position: Adjusting the robot’s movement direction
is relative to the initial position; we proposed this state
diagram as shown in the following figure 6.
Figure 6: Robot state diagram to adjust movement direc-
tion.
Exploration of Unknown Map for Gas Searching and Picking Up Objects using Khepera Mobile Robots
299
Sensors used in the Experiments: Infrared sensors
provide low range coverage, less than 0.5m in most
cases, this is because the emitted energy is not con-
centrated. However, infrared sensors are cheap and
reliable for many applications. For instance, they can
be used successfully to detect obstacles that are close
to the robot. The threshold of the two ground infrared
proximity sensors to distinguish between white and
black lines on the floor is 3000 while the threshold of
the IR sensors to detect obstacle is greater than 65.
It is better to use the ultrasound sensor to detect
obstacles in long distances. Each sonar sensor
measurement provides information about the empty
and occupied spaces in the cone in front of the
sensor. The multiple measurements are integrated
in a sonar sensor map, using a powerful tool that
combines information from sensors in such a way
to deal with errors and uncertainties in the data. We
propose to take the best sonar reading as follows;
take N measurements from each sensor, arrange them
in ascending order, and then take the median value.
This is probably the best reading.
Gas Sensor Circuit and Gripper: During explo-
ration and navigation, the master robot is equipped
with a gas sensor board developed manually by us as
shown in figure 7. It can be used for detecting leakage
gas equipment both in residential areas and industry.
The gas sensor module name is MQ-6. It is sen-
sitive to LPG, iso-butane gas, propane, natural gas
and town gas. It avoids the noise of alcohol, cook-
ing fumes and, cigarette smoke. The sensor needs a
resistor at the output to ground. Its value is ranging
from 2kOhm to 47kOhm, the lower the value is, the
less sensitive the sensor is. Also, the higher the value
is, the less accurate, it is for higher concentrations of
gas (Datasheet, ). We choose 12kOhm as a suitable
value in our designed circuit. The designed circuit
in figure 7 is composed of the MQ-6 gas module. It
has two leds; one of them is a power indicator, and
the other one is an indicator of sensing the gas odor.
Reading take digitally from bin number IO1 in Kor-
eIOLE Extension Board.
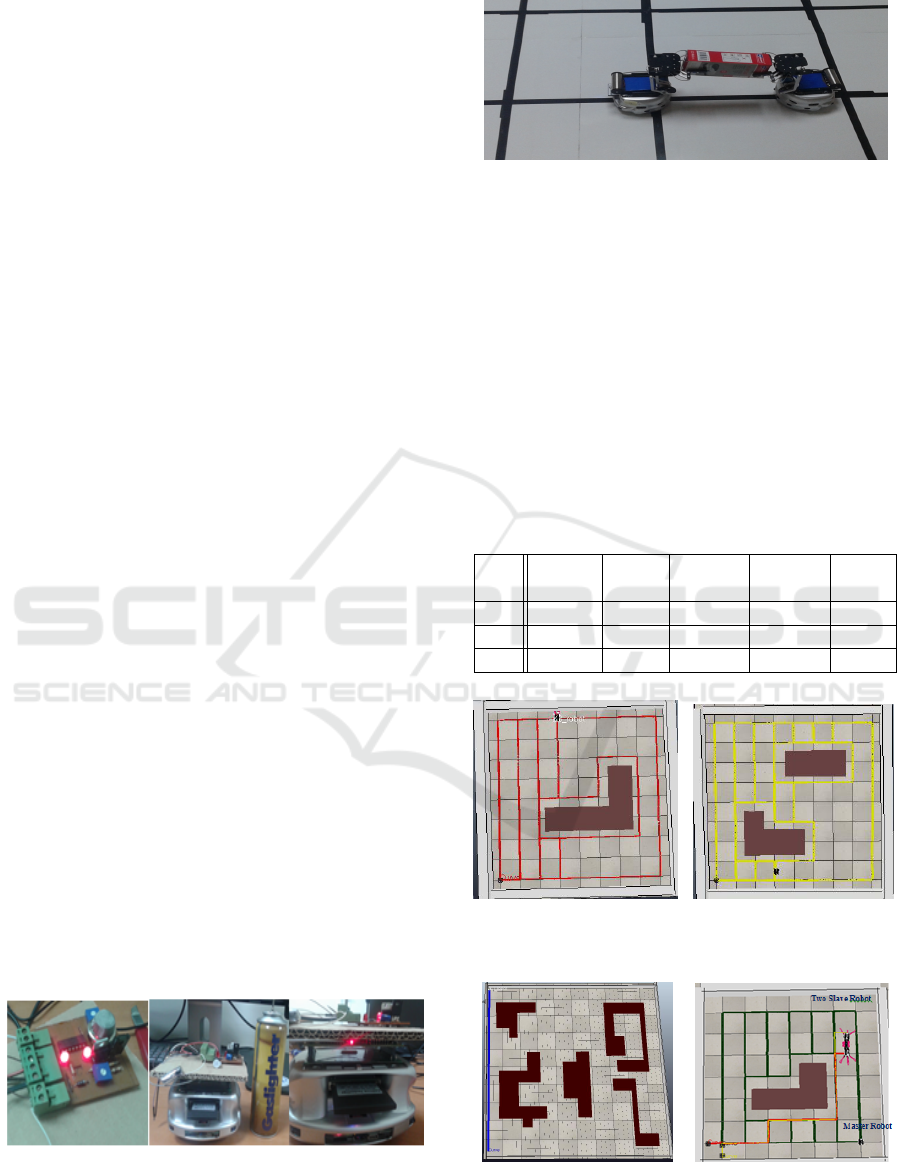
Figure 7: Gas sensor circuit combined with khepera III.
Figure 8: Two khepera III with grippers to capture object
(potentional victim).
5 EXPERIMENTS
5.1 V-REP Simulation
V-REP is a very nice tool for fast prototyping and ver-
ification, remote monitoring and swift algorithm de-
velopment. A V-REP plug-in was specially developed
to allow an axiomatical and realistic Khepera robot
simulation in (Rohmer et al., 2013).
Table 1: Comparison between the proposed approach and
Albers approaches in vrep simulation.
Test Map
Nodes
Obsta-
cles
Albers
in min
Zigzag
in min
Speed
Up
T1 9*9 1 22.5 14.5 35%.
T2 9*9 2 25 17.25 30%
T3 19*39 5 326.16 191.76 41.2%
(a) (b)
Figure 9: (a) Map with one obstacle in test-1, (b) Map with
two obstacles in test-2.
(a) (b)
Figure 10: Left is a large map with five obstacles in test-3
and right shows the master robot track in green line, red and
yellow lines are the tracks of the two slave robots in test-4.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
300
The current section describes the experimental de-
tails, assumptions, and the obtained results tested by
V-REP where the Lua programming language is used.
Use a Khepera robot to explore a map consisting
of n × m nodes and N obstacles where n is the hori-
zonal nodes, and m is vertical nodes and N is the num-
ber of barriers in the environment. Table 1 compares
the result of Albers algorithm, and the Zigzag pro-
posed algorithm. Test-1, Test-2, and Test-3 are shown
in Figures 9 and 10 respectively.
Test-4: Use a master robot to explore a map that con-
sists of 7 × 7 nodes with one obstacle and two slave
robots to catch goal which demonstrates in Algorithm
1 as shown in figure 10.
5.2 Real World Experiment
Use a Khepera robot to explore a map consisting of
S ×R nodes and M obstacles where S is the horizonal
nodes, and R is vertical nodes and M is the number of
obstacles in the environment. Table 2 compares the
result of Albers algorithm, and the Zigzag proposed
algorithm. Test-1 and Test-2 are shown in Figure 11.
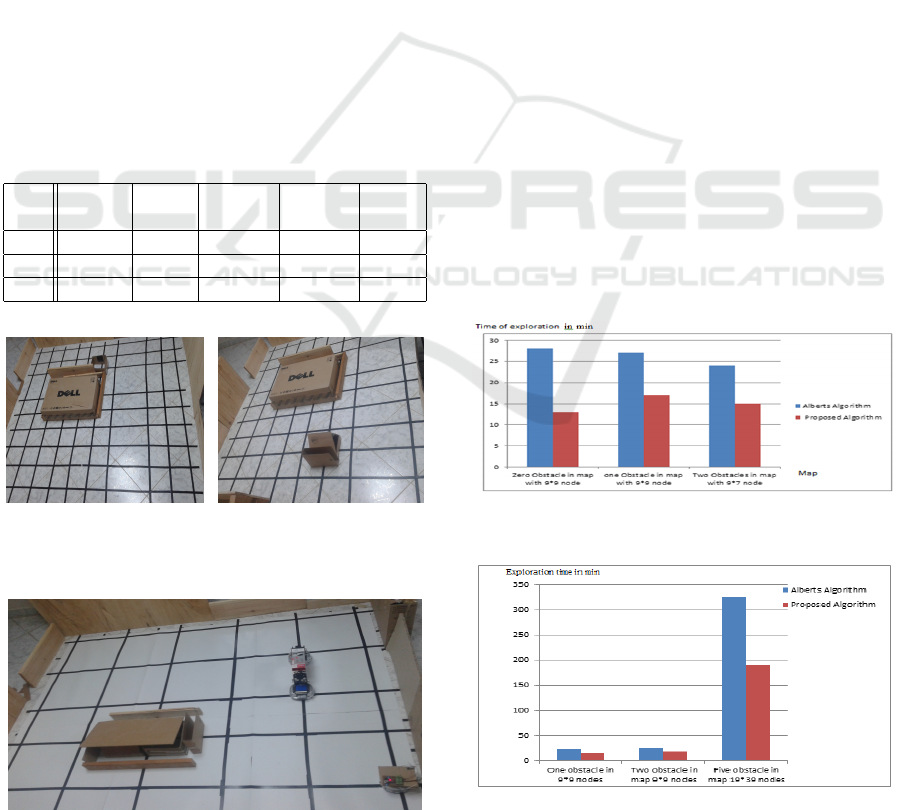
Table 2: Comparison between the proposed approach and
Albers approaches in Real World.
Test Map
Nodes
Obsta-
cles
Albers
in min
Zigzag
in min
Speed
Up
T1 9*9 0 28 13 57%
T2 9*9 1 27 17 37%
T3 9*7 2 24 15 35%
(a) (b)
Figure 11: (a) Map with one obstacle in experiment-1 at
real world, (b) Map with two obstacles in experiment-2.
Figure 12: Master and slave robots in test-4 at real world.
Test-4: This experiment is a whole system where a
master robot with the gas sensor is used in searching,
and two slave robots with grippers are used for pick-
ing up the object as shown in figure 12.
6 CONCLUSIONS
This paper enhance Albers algorithm (LRT) by using
proposed Zigzag Ray Traversal algorithm (LURT).
The proposed (LURT) algorithm reduces the ex-
ploration time compared to the LRT. These algo-
rithms are tested using the V-REP simulation and
real world experiments. The percentage of per-
formance speedup is about 30% to 57% depend-
ing on the size of the map and the number of ob-
stacles as shown in figure 13, 14 . Also, this
paper developped an itegrated approach for using
Khepera robots in detecting gas leakage and captur-
ing objects. All experiment as shown in vedio list
link https://www.youtube.com/playlist?list=
PLzxdjgyt-2Qy6G-pAJ4zdXeK_V-OqDPM- .
In future work, we will develop algorithms for
multi-robot to explore large geometric maps without
an intermediate computer in order to reduce the ex-
ploration time and enhance the overall performance.
Dispensing an intermediate computer will make hard
challenging in cooperation between robots and how
much signals could transfer between them. Also, we
will use laser range finder to detect far obstacles and
objects easily and accurately.
Figure 13: Comparing the results of Albers with our pro-
posed algorithm in real world.
Figure 14: Comparing the results of Albers with our pro-
posed algorithm in V−REP.
Exploration of Unknown Map for Gas Searching and Picking Up Objects using Khepera Mobile Robots
301

ACKNOWLEDGMENTS
The author would like to thank Dr. Alaa sheta
from Electronic Research Institute, Dr. Mohammed
Hamdy from Fayoum University and Dr. Mohammed
Abdel-Aziz Khamis from E-JUST for their continu-
ous help. The first author is supported by a scholar-
ship from the Mission Department, Ministry of Scien-
tific Research of Egypt which is gratefully thankful.
REFERENCES
Albers, S., Kursawe, K., and Schuierer, S. (2002). Explor-
ing unknown environments with obstacles. Algorith-
mica, 32(1):123–143.
Amigoni, F. (2008). Experimental evaluation of some ex-
ploration strategies for mobile robots. In Robotics
and Automation. ICRA, IEEE International Confer-
ence on, pages 2818–2823. IEEE.
Bender, M. A., Fern
´
andez, A., Ron, D., Sahai, A., and Vad-
han, S. (2002). The power of a pebble: Exploring and
mapping directed graphs. Information and Computa-
tion, 176(1):1–21.
Betke, M., Rivest, R. L., and Singh, M. (1995). Piecemeal
learning of an unknown environment. Machine Learn-
ing, 18(2-3):231–254.
Chakkath, M. S., Hariharansiddharath, S., and Hemalatha,
B. (2012). Mobile robot in coal mine disaster surveil-
lance. Transportation, 261:230.
Datasheet, M.-. L. S.
Deng, X., Kameda, T., and Papadimitriou, C. (1998). How
to learn an unknown environment. i: the rectilinear
case. Journal of the ACM (JACM), 45(2):215–245.
Doriya, R., Mishra, S., and Gupta, S. (2015). A brief sur-
vey and analysis of multi-robot communication and
coordination. In Computing, Communication & Au-
tomation (ICCCA), 2015 International Conference on,
pages 1014–1021.
E.W.Dijkstra (1959). A note on two problems in connexion
with graphs. Numerische mathematik, 1(1):269–271.
Fekete, S. P. and Schmidt, C. (2010). Polygon exploration
with time-discrete vision. Computational Geometry,
43(2):148–168.
Ghosh, S. K. and Klein, R. (2010). Online algorithms for
searching and exploration in the plane. Computer Sci-
ence Review, 4(4):189–201.
Hammar, M., Nilsson, B. J., and Persson, M. (2006). Com-
petitive exploration of rectilinear polygons. Theoreti-
cal computer science, 354(3):367–378.
Herrmann, D., Kamphans, T., and Langetepe, E. (2010).
Exploring simple triangular and hexagonal grid poly-
gons online.
Higashikawa, Y. and Katoh, N. (2013). Online vertex explo-
ration problems in a simple polygon. IEICE TRANS-
ACTIONS on Information and Systems, 96(3):489–
497.
Hoffmann, F., Icking, C., Klein, R., and Kriegel, K. (2001).
The polygon exploration problem. SIAM Journal on
Computing, 31(2):577–600.
Icking, C., Kamphans, T., Klein, R., and Langetepe, E.
(2010). Exploring grid polygons online. arXiv
preprint arXiv:1012.5240.
IS¸ILAK, A. H. (2010). Smart home applications for dis-
abled people by using wireless sensor network. Engi-
neering Project Report.
Kim, J.-H., Starr, J. W., and Lattimer, B. Y. (2015). Fire-
fighting robot stereo infrared vision and radar sensor
fusion for imaging through smoke. Fire Technology,
51(4):823–845.
Lambercy, F. and Bureau, P. (2007). Khepera iii user man-
ual. User manual, K-Team.
Le Comte, B. R., Gupta, G. S., and Chew, M. T. (2012).
Distributed sensors for hazard detection in an urban
search and rescue operation. In Instrumentation and
Measurement Technology Conference (I2MTC), 2012
IEEE International, pages 2385–2390. IEEE.
Marjovi, A. and Marques, L. (2011). Multi-robot olfactory
search in structured environments. Robotics and Au-
tonomous Systems, 59(11):867–881.
Qi, Q., Cheng, L., Wu, H., Liu, N., Huang, J., and Wang,
Y. (2015). Mobile olfaction robot odor source local-
ization based on wireless sensor network. In Chinese
Automation Congress (CAC), 2015, pages 366–370.
Ransing, R. S. and Rajput, M. (2015). Smart home for
elderly care, based on wireless sensor network. In
Nascent Technologies in the Engineering Field (IC-
NTE), 2015 International Conference on, pages 1–5.
Rivest, R. L., Singh, M., and Betke, M. (2015). Piecemeal
learning of an unknown environment.
Rohmer, E., Singh, S. P., and Freese, M. (2013). V-rep:
A versatile and scalable robot simulation framework.
pages 1321–1326.
XScale, I. (2002). Core developer’s manual. 2007-10-10].
http://developer. intel. com/design/intelxscale.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
302
