
Recursive Total Variation Filtering Based 3D Fusion
M. A. A. Rajput
1
, E. Funk
1
, A. B
¨
orner
1
and O. Hellwich
2
1
Department of Information Processing for Optical Systems, Institute of Optical Sensor Systems,
German Aerospace Center, Berlin, Germany
2
Computer Vision and Remote Sensing, Technical University Berlin, Berlin, Germany
Keywords:
Large Scale Automated 3D Modelling, Mobile Robotics, Efficient Data Structures, 3D Database.
Abstract:
3D reconstruction from mobile image sensors is crucial for many offline-inspection and online robotic ap-
plication. While several techniques are known today to deliver high accuracy 3D models from images via
offline-processing, 3D reconstruction in real-time remains a major goal still to achieve. This work focuses on
incremental 3D modeling from error prone depth image data, since standard 3D fusion techniques are tailored
on accurate depth data from active sensors such as the Kinect. Imprecise depth data is usually provided by
stereo camera sensors or simultaneous localization and mapping (SLAM) techniques. This work proposes an
incremental extension of the total variation (TV) filtering technique, which is shown to reduce the errors of
the reconstructed 3D model by up to 77% compared to state of the art techniques.
1 INTRODUCTION
Mobile robotic applications gained strong impetus
during last years. Inspection via small vehicles,
drones, underwater robots received strong interest en-
abling to access areas which are not accessible by hu-
mans. Before sending a robot for an observation mis-
sion, this is planned a priori. In the case of drone
flights, the way points are selected on a map which
are later targeted by the drone during the flight. How-
ever, when unforeseen physical effects such as wind
or insufficient light conditions arise, the quality of the
collected data drops. Only after a mission has been
accomplished, the user can react on the missing scans
and plan a new mission. This however, is cumber-
some in most cases as the light, weather or access
permissions change.
For this and similar reasons mobile robotics com-
munity focuses on the research and development of
real time 3D reconstruction and modeling. This
would make it possible to validate the data acquired
by a robot in real time and to correct the mission ac-
cordingly. Unfortunately, 3D reconstruction is a no-
toriously difficult topic which generally suffers from
low quality of the 3D reconstruction even if the com-
putations take hours or even weeks. This issue is even
intensified when the 3D reconstruction and modeling
has to run in real time, which naturally further de-
creases the quality of the obtained 3D data.
However, building a system that can perform in-
cremental real-time dense large-scale reconstruction
is crucial for many applications such as robot navi-
gation (Dahlkamp et al., 2006; Christopher Urmson
et. al, 2008) wearable and/or assistive technology
(goo, 2014; Hicks et al., 2013), and change detection
(Taneja et al., 2013). Recently a few methods have
been proposed to perform incremental reconstruc-
tion (fusion) of the observed geometries from RGB-D
measurements (Funk and B
¨
orner, 2016; K
¨
ahler et al.,
2015; Steinbruecker et al., 2014).
These however, do not deal with the noise in the
data which prohibits to apply the methods on RGB-
D images from (stereo) camera sensors. This moti-
vated the research on an incremental noise suppres-
sion technique, which is presented in this work. The
presented approach relies on total variation (TV) fil-
tering, which is known to perform well when applied
in offline-processing. The main contribution of this
work is the extension of the time consuming TV com-
putations to a recursive form, enabling to re-use the
previously computed model and thus to enable robust
incremental 3D reconstruction in real time systems.
The underlying work presents a voxel-based in-
cremental 3D fusion approach which makes it possi-
ble to create and to store large 3D models and maps.
Section 2 introduces details from the state of the art
research on incremental 3D modeling, aligned to the
proposed approach. Section 3 states the research ob-
jectives investigated in this work. In Section 4.2
72
Rajput, M., Funk, E., Börner, A. and Hellwich, O.
Recursive Total Variation Filtering Based 3D Fusion.
DOI: 10.5220/0005967700720080
In Proceedings of the 13th International Joint Conference on e-Business and Telecommunications (ICETE 2016) - Volume 5: SIGMAP, pages 72-80
ISBN: 978-989-758-196-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

the proposed method is presented, which clarifies the
novelty of this work. Section 5 demonstrates the ap-
plication of the technique on a benchmark dataset
with an available ground truth leading to quantitative
comparison between the proposed and two selected
techniques. Finally, concluding remarks and aspects
for further research are given in Section 7.
2 LITERATURE OVERVIEW
2.1 Reconstruction
Early real-time dense approaches (St
¨
uhmer et al.,
2010; Newcombe et al., 2011) were able to estimate
the image depth from monocular input, but their use
of a dense voxel grid limited reconstruction to small
volumes and to powerful GPU devices due to high
memory and computation requirements. Also suf-
fering from the scalability issue, KinectFusion (Izadi
et al., 2011; Funk and B
¨
orner, 2016) directly sensed
depth using active sensors and fused the high qual-
ity depth measurements over time to surfaces. The
scalability issue has been resolved by voxel hierarchy
approaches (Chen et al., 2013) or direct voxel block
hashing (K
¨
ahler et al., 2015) to avoid storing unneces-
sary data for free space allowing scaling to unbounded
scenes. At the core, the mentioned approaches rely
on the volumetric fusion arithmetic from (Curless and
Levoy, 1996), which expects accurate depth measure-
ments. Thus, the issues with error prone data remains
uncovered.
2.2 Noise Suppression and Fusion
Regarding the noise suppression of error prone depth
measurements, direct depth image filtering became
state of the art and has been applied in several projects
(St
¨
uhmer et al., 2010; Newcombe et al., 2011). Basi-
cally, the TVL
1
technique from (Rudin et al., 1992)
is applied enforcing the photo consistency and depth
smoothness between multiple images observing the
same object. This approach delivers high quality re-
sults given depth measurements of low quality. How-
ever, the TVL
1
fusion computation is performed every
time a new depth image is added to the scene leading
to slow frame rates.
3 RESEARCH OBJECTIVES
This work addresses both critical challenges identi-
fied from the literature, which are: i) The reconstruc-
tion of unbounded environments. This is addressed
by the method of (Funk and B
¨
orner, 2016). ii) The
3D fusion of error prone depth data into a volumet-
ric 3D space, which is the main aspect of this work.
The goal of this research was to perform TV fusion
directly on the 3D voxel space while replacing the L
1
cost by a recursive L
2
optimization.
4 METHODOLOGY
4.1 Camera Model and World
Representation
In order to generalize the fusion framework, we de-
signed our system to work with series of depth im-
ages captured by pinhole based depth camera (such as
Kinect camera used in KinFu (Izadi et al., 2011)) and
color images captured from standard pinhole color
camera. We assume that scaled focal lengths ( f
x
, f
y
)
and a central point c = (c
x
, c
y
) of both cameras are
known. At every time stamp t both cameras record
respective depth image Z
t
and a color image I
t
along
with translation T
t
∈ R
3
and orientation R
t
∈ SO(3) is
also acquired. A pixel (x, y)
T
on image plane can be
related to a global 3D point P
w
∈ R
3
by
P
w
= R
t
.
(x − c
x
)
Zt(x,y)
f
x
(y − c
y
)
Zt(x,y)
f
y
Zt(x, y)
+ T
t
. (1)
P
w
represents a 3D coordinate in world space. De-
pending upon the desired scale of reconstruction P
w
can be scaled accordingly. In actual fusion stage the
model can also be re-sampled in 3D voxel space, sim-
ilar to world coordinate system each voxel can be ac-
cessed as V
(x,y,z)
∈ R
3
.
In volumetric depth fusion approaches (Curless
and Levoy, 1996; K
¨
ahler et al., 2015; Steinbruecker
et al., 2014), a signed distance function (SDF) is com-
puted for all voxels which are in near proximity of the
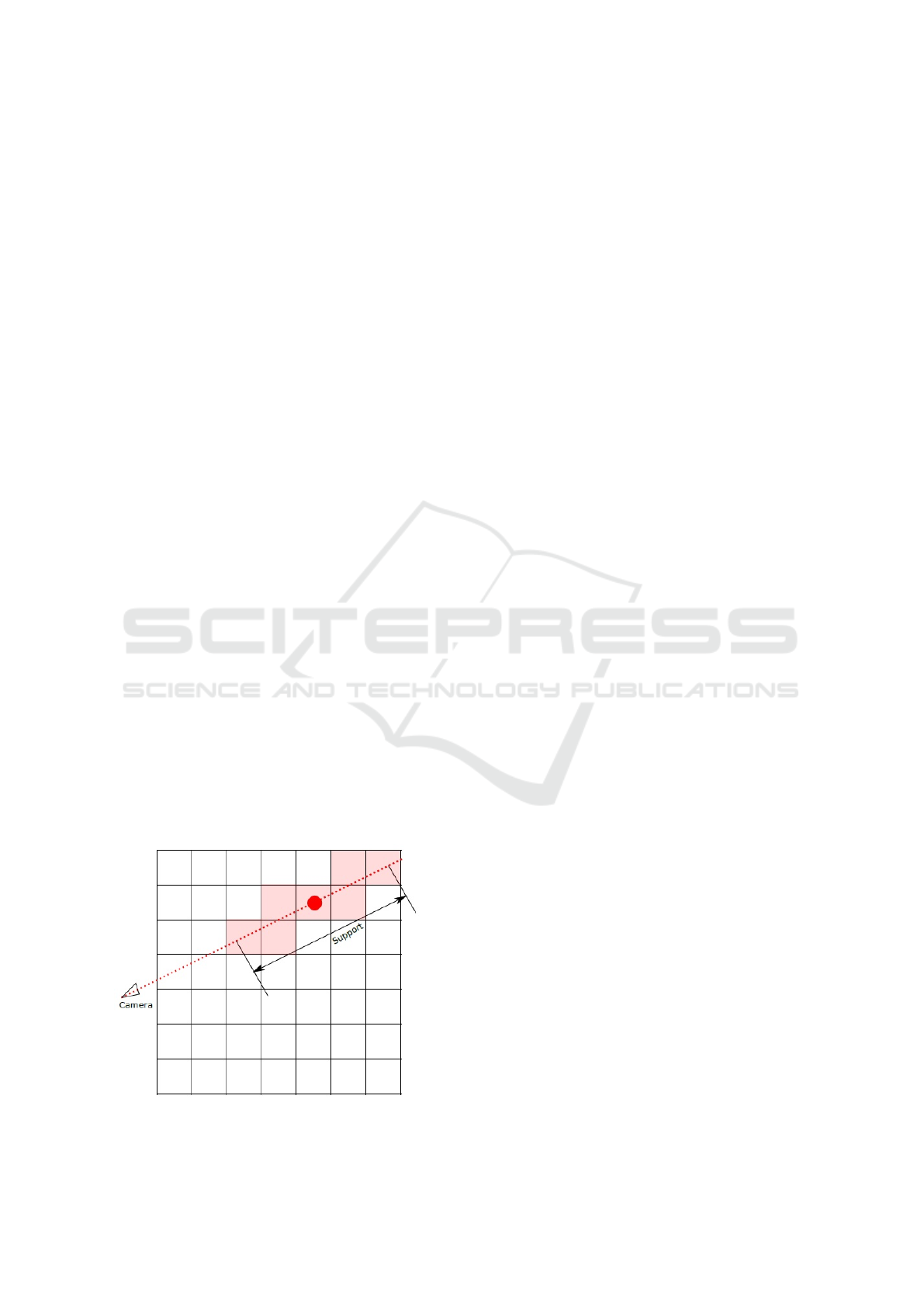
implicit surface. However our proposed scheme uses
only those voxels which lie along-the-ray from cam-
era center Cam
w
and a 3D sample position in world
space P
w
, this selection of voxels referred as SDF-
signal as shown in figure 1. In our implementation
we use linear Truncated Signed Distance Function
(TSDF) which ranges between [+1, ..., −1], which re-
sults in implicit representation having zero-crossing
at the given depth. These SDF-Signals are then used
directly in recursive fusion framework.
Since the main objective of proposed scheme is to
optimize depth fusion and enhance overall 3D recon-
struction, we incorporate ground truth camera poses
during fusion process. This assumption prevents all
Recursive Total Variation Filtering Based 3D Fusion
73
the problems related to failed tracking in SLAM and
ensures that optimization is focused on depth fusion.
4.2 Recursive TV 3D Fusion
Proposed scheme uses the recursive aspect of Least
Square Estimation (LSE) in which depth fusion is
achieved by solving the system of linear equation. As-
suming x ∈ R
n
is SDF signal containing current state
of system and y ∈ R
n
is SDF signal generated from
particular depth sample with n being the ray support
length in voxels. In order to fuse these two SDF sig-
nals using least squares we assume that transforma-
tion function between x and y is linear in nature. Thus,
least square estimate ˆx is that value of y that mini-
mizes the residual error
kAx + yk
2
2
(2)
In order to add inherent Total Variation filtering based
regularization in proposed technique, we can take ad-
vantage by accessing the values in neighboring vox-
els. Hence minimization function for such regularized
recursive system can be re-written as
kAx + yk
2
2
+ λkg(x)k
2
2
(3)
Where λ is regularization parameter and g(x) is func-
tion which approximate the second order finite differ-
ence. Although the number of voxels in SDF signal
(referred compactly as Support in further description)
depends upon the scale of reconstruction and noise,
for explanation purpose we assume support n = 5
voxels. Assuming that v
k+1
= {a
1
, a
2
, a
3
, ...a
n
} is a
SDF signal represented as a vector containing all the
voxels on a ray through a 3D sample (Figure 1) and a
i
represents the SDF values of these voxels before the
update the Equation 3 can be written as
kAx + yk
2
2
+ λkDv +Ck
2
2
(4)
Figure 1: SDF signal and selected voxels.
Actual derivation of D, C matrices and simplifica-
tion of Equation 4 is beyond the scope of this paper
however detail steps can be found in the Appendix 7.
Next, the proposed technique is compactly referred to
as RFusion.
4.3 Update Algorithm
Algorithm 1 shows a simplified version of RFusion
which describes how the SDF signal is accessed and
updated. In actual implementation the algorithm was
implemented using threads to maximize the efficiency
and utilize the latest CPU architecture. We start our
fusion application by instantiating an object of data
structure proposed by (Funk and B
¨
orner, 2016) in line
1. For each pixel(row, col) individual steps for fusion
algorithm are:
• calculation of 3D world coordinate P
w
at (row,
col), line 10
• getting RGB value at (row, col), line 11
• generating linear TSDF values (i.e. [+1, ..., −1])
depending upon the support, line 12
• reading current SDF value from voxels and creat-
ing SDF signal from W , line 13
• getting value of d and c matrices using method
describe in Appendix 7
• compute the new SDF signal y
t
from previous es-
timate ˆx
t−1
, line 15
• updating the W with latest estimate for particular
depth sample in line 16
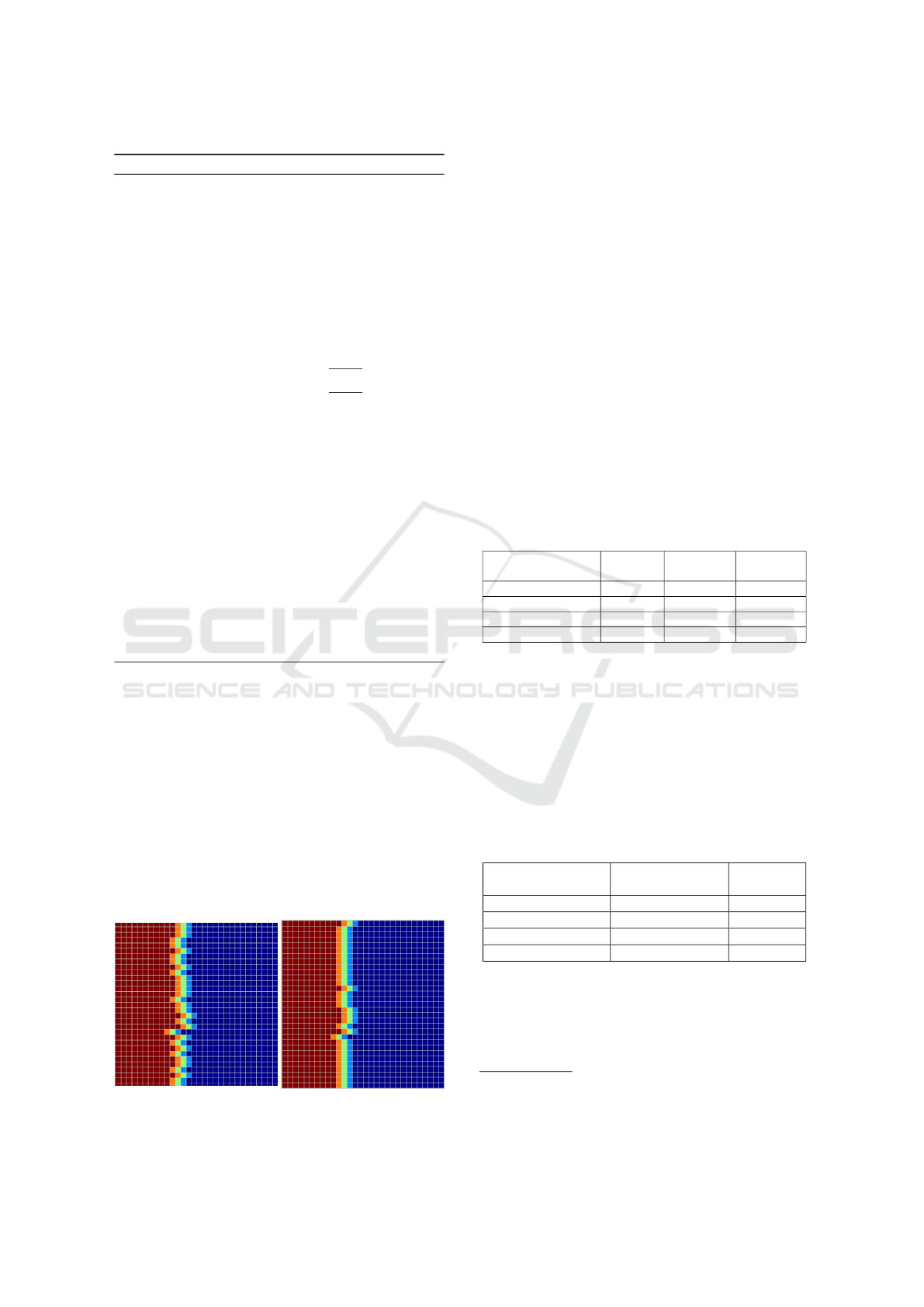
4.4 Effects of Regularization
In order to investigate and visualize the effects of
regularization parameter λ on noise suppression and
optimized depth fusion, we implemented 2D variant
of the proposed scheme. To avoid the effects of fu-
sion from regularization, single synthetic surface is
fused with itself. It was observed that TV filtering
produced inherent smoothing effect on voxels at the
time of SDF signal fusion. This regularization effect
is demonstrated in Figure 2, where red cells repre-
sent positive values and blue cells represent negative
TSDF values.
5 EXPERIMENTS
5.1 ICL RGBD Dataset
In order to analyze the working of proposed scheme
we used synthetic RGBD dataset provided by ICL-
NUIM (Handa et al., 2014) which is considered to be
SIGMAP 2016 - International Conference on Signal Processing and Multimedia Applications
74
Algorithm 1: Simplified RFusion algorithm.
1: let W ← DataStructure (from (Funk and B
¨
orner,
2016))
2: procedure FUSE
3: t ← currentFrame
4: I
t
← RGB image and Z
t
← Depth image
5: T
t
← Translation
6: R
t
← Rotation
7: support ← 5
8: for i = 0 to rows-1 do
9: for j = 0 to cols-1 do
10: P
w
← R
t
.
(x − c
x
)
Zt(x,y)
f
x
(y − c
y
)
Zt(x,y)
f
y
Zt(x, y)
+ T
t
.
11: color ← I
t
.getColor(i,j)
12: y
t
←getTSDF()
13: ˆx
t−1
← W.readVoxels(P
w
,T
t
,support)
14: [d,c] ← W.getDC(x) (from eq. 20)
15: ˆx
t
← ˆx
t−1
+P
t
φ(y
t
−λd
T
c)−(φ
T
φ+
λd
T
d) ˆx
t−1
(from eq. 13)
16: W .updateSystem( ˆx
t
,color)
17: end for
18: end for
19: t ← t + 1
20: end procedure
standard in depth fusion and 3D reconstruction eval-
uation. We have tested proposed scheme with and
without noise for thorough evaluation.
5.2 Evaluation
Since the dataset is synthetic in nature, it is possi-
ble to evaluate reconstructed model with actual model
afterwards. After necessary alignment and scaling,
for each vertex in the reconstructed model a clos-
est triangle is registered and perpendicular distance
is recorded. Five standard statistics (Mean, Median,
Figure 2: (left) illustrates an implicit surface with noise;
(right) demonstrates the effects of regularization parameter.
Standard Deviation, Min and Max etc) can be com-
puted from the recorded distance as suggested by
(Handa et al., 2014).
However we will analyze the performance of each
framework with mean and standard deviation of stan-
dard statistics.
Candidates for quantitative comparison are fol-
lowing fusion frameworks:
1. Fast Fusion (Steinbruecker et al., 2014)
2. RFusion
3. InfiniTAM
1
(K
¨
ahler et al., 2015)
It is worth mentioning that similar to proposed tech-
nique, ground truth camera poses ware used instead
of tracking to avoid any biased evaluation. Figure 3
illustrates the reconstruction with our proposed tech-
nique vs the reconstruction from FastFusion. It was
observed that RFusion was able to fuse minute details
of model (such as lamp pole, leaves of plant etc) into
single connected mesh however FastFusion generated
multiple inconsistent meshes.
Table 1: Comparision of absolute surface error (in meters).
X
X
X
X
X
X
X
X
X
X
Dataset
Method
RFusion FastFusion InfiniTAM
LR0 0.003045 0.011895 0.008900
LR1 0.002947 0.011204 0.002900
LR2 0.003183 0.006634 0.008800
LR3 0.002978 0.018180 0.041000
During experimentation phase it was observed
that RFusion gives improved performance compared
to state of art fusion techniques and achieved 4-5
frames per second on pure CPU based implementa-
tion.
System used for experimentation has the follow-
ing specifications: Intel Core i7-4790, 8GB RAM
with Windows 7 (64-bit) OS.
Table 2: Comparision of absolute surface error on noisy
dataset (in meters).
X
X
X
X
X
X
X
X
X
X
Dataset
Method
RFusion (λ = 0.3) FastFusion
LR0 0.01336 0.05672
LR1 0.01416 0.07523
LR2 0.01979 0.07082
LR3 0.02090 0.06643
1
Since we ware not able to modify the working of Infini-
TAM with ICL-NUIM dataset we are using the Mean val-
ues published in (K
¨
ahler et al., 2015) for this dataset
Recursive Total Variation Filtering Based 3D Fusion
75
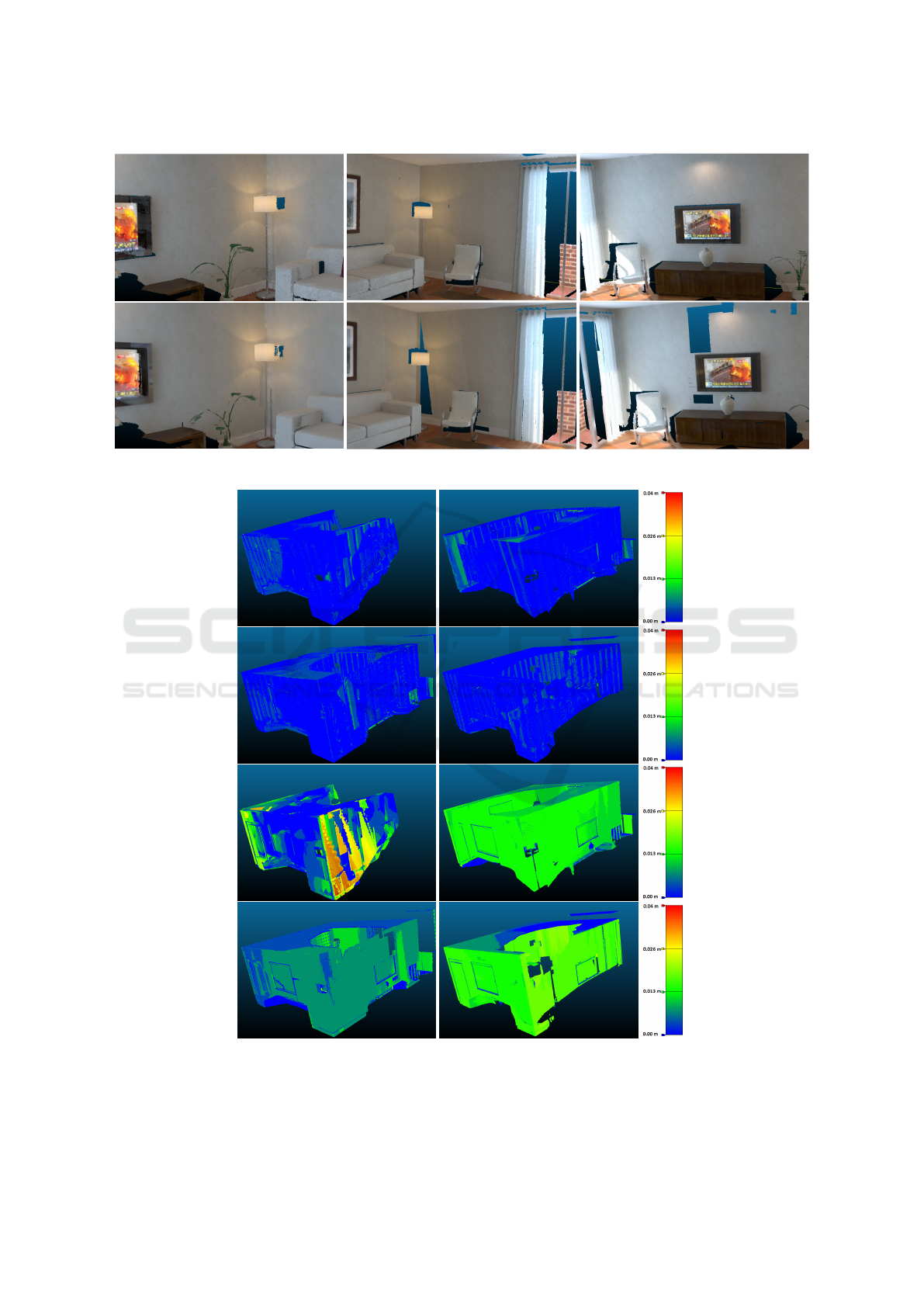
Figure 3: Screenshots from reconstructed model with RFusion (upper row) and FastFusion (bottom row).
Figure 4: Color coded errormaps from RFusion (Upper 2 rows) vs FastFusion (Bottom 2 rows) along with absolute color scale
used to genarate errormaps.
SIGMAP 2016 - International Conference on Signal Processing and Multimedia Applications
76

Figure 5: RGB images (upper row), depth images (second row) and reconstructed 3D model (last row).
Figure 6: RGB images (upper row), depth images (second row) and reconstructed 3D model (last row).
Recursive Total Variation Filtering Based 3D Fusion
77

6 EXPERIMENTATION RESULTS
FROM IPS DATA
In order to evaluate the working of proposed system
with real data, we used dataset captured from stereo
camera based IPS (Baumbach and Zuev, 2014). Since
the data is real in nature, it is not feasable to evaluate
the absolute surface error of reconstructed model and
actual environment. Therefore Screenshots of such
reconstruction are illustrated in figure 5 and 6 for vi-
sual inspection and evaluation.
7 CONCLUSION AND OUTLOOK
In this paper, we presented a novel approach to ad-
dress the challenges related to 3D depth fusion and
reconstruction with the use of L2 regularization based
recursive fusion framework. We demonstrated that
the proposed system has potential of reducing noise
along with capability of incremental 3D depth fusion.
At current state, implementation of proposed scheme
is purely threads based CPU processing, however fur-
ther implementation is required to extend the frame-
work to utilize latest GPU computation power along
with CPU processing. Furthermore, since the system
handles noise inherently, it would be interesting to in-
tegrate planar simplification techniques for improved
3D reconstruction in future research exploration.
REFERENCES
(2014). ATAP Project Tango Googl. http://www.google.
com/atap/projecttango/. Accessed: 2015-11-22.
Baumbach, D. G. D. and Zuev, S. (2014). Stereo-Vision-
Aided Inertial Navigation for Unknown Indoor and
Outdoor Environments. In Proceedings of the Interna-
tional Conference on Indoor Positioning and Indoor
Navigation (IPIN), 2014 . IEEE.
Chen, J., Bautembach, D., and Izadi, S. (2013). Scalable
real-time volumetric surface reconstruction. ACM
Trans. Graph., 32(4):113:1–113:16.
Christopher Urmson et. al (2008). Autonomous driving in
urban environments: Boss and the urban challenge.
Journal of Field Robotics Special Issue on the 2007
DARPA Urban Challenge, Part I, 25(8):425–466.
Curless, B. and Levoy, M. (1996). A volumetric method for
building complex models from range images. In Pro-
ceedings of the 23rd Annual Conference on Computer
Graphics and Interactive Techniques, SIGGRAPH
’96, pages 303–312, New York, NY, USA. ACM.
Dahlkamp, H., Kaehler, A., Stavens, D., Thrun, S., and
Bradski, G. (2006). Self-supervised monocular road
detection in desert terrain. In Proceedings of Robotics:
Science and Systems, Philadelphia, USA.
Funk, E. and B
¨
orner, A. (2016). Infinite 3d modelling vol-
umes. In VISAPP 2016.
Handa, A., Whelan, T., McDonald, J., and Davison, A. J.
(2014). A benchmark for rgb-d visual odometry, 3d
reconstruction and slam. In Robotics and Automa-
tion (ICRA), 2014 IEEE International Conference on,
pages 1524–1531. IEEE.
Hicks, S. L., Wilson, I., Muhammed, L., Worsfold, J.,
Downes, S. M., and Kennard, C. (2013). A depth-
based head-mounted visual display to aid naviga-
tion in partially sighted individuals. PLoS ONE,
8(7):e67695.
Izadi, S., Kim, D., Hilliges, O., Molyneaux, D., Newcombe,
R., Kohli, P., Shotton, J., Hodges, S., Freeman, D.,
Davison, A., and Fitzgibbon, A. (2011). Kinectfu-
sion: Real-time 3d reconstruction and interaction us-
ing a moving depth camera. In ACM Symposium on
User Interface Software and Technology. ACM.
K
¨
ahler, O., Prisacariu, V. A., Ren, C. Y., Sun, X., Torr,
P. H. S., and Murray, D. W. (2015). Very High
Frame Rate Volumetric Integration of Depth Images
on Mobile Device. IEEE Transactions on Visualiza-
tion and Computer Graphics (Proceedings Interna-
tional Symposium on Mixed and Augmented Reality
2015, 22(11).
Newcombe, R. A., Lovegrove, S. J., and Davison, A. J.
(2011). Dtam: Dense tracking and mapping in real-
time. In Proceedings of the 2011 International Con-
ference on Computer Vision, ICCV ’11, pages 2320–
2327, Washington, DC, USA. IEEE Computer Soci-
ety.
Rudin, L. I., Osher, S., and Fatemi, E. (1992). Nonlinear to-
tal variation based noise removal algorithms. Physica
D: Nonlinear Phenomena, 60(14):259 – 268.
Steinbruecker, F., Sturm, J., and Cremers, D. (2014). Volu-
metric 3d mapping in real-time on a cpu. In Int. Conf.
on Robotics and Automation, Hongkong, China.
St
¨
uhmer, J., Gumhold, S., and Cremers, D. (2010). Real-
time dense geometry from a handheld camera. In Pat-
tern Recognition (Proc. DAGM), pages 11–20, Darm-
stadt, Germany.
Taneja, A., Ballan, L., and Pollefeys, M. (2013). City-scale
change detection in cadastral 3d models using images.
In Computer Vision and Pattern Recognition (CVPR),
Portland.
APPENDIX
Derivation of RFusion
In this section we derive the equations of RFusion,
for the sake of better readability we will simplify the
equations for 2D fusion system rather than 3D fusion
system. Assuming n = support of SDF signal, ˆx is
estimated state of system for particular 3D voxel and
y = new TSDF signal. Then such system can easily be
SIGMAP 2016 - International Conference on Signal Processing and Multimedia Applications
78

describe by the following equation.
y = φ ˆx
ˆx = (φ
T
φ)φ
T
y (5)
In order to integrate the true aspect of second order
finite difference it is assumed that
ˆ
Y = Y − λD
T
C (6)
Since equation 5 is only valid if we have single in-
put SDF signal, we assume that we have multiple
SDF signals, Then we can extend equation 5 for batch
based least square system as follows
y
0∗1
y
0∗2
...
y
0∗n
y
1∗1
...
y
m∗n
=
1 0 0 0 0
0 1 0 0 0
...
0 0 0 0 1
1 0 0 0 0
...
0 0 0 0 1
ˆx
where m is the number of SDF signals about to be
merged
ˆ
Y = Φx
x = (Φ
T
Φ)Φ
T
ˆ
Y
The regularized variant of batch-based system can be
re-written as
ˆx =
Φ
T
Φ + λD
T
D
Φ
T
ˆ
Y (7)
where λ is a regularization parameter. In order to con-
vert batch based system to recursive system we as-
sume that Φ,Y and D follow recursive succession
Φ
k+1
=
Φ
K
φ
ˆ
Y
k+1
=
ˆ
Y
K
ˆy
andD
k+1
=
D
k
d
Equation 7 for k + 1 instance can be written as
ˆx
k+1
=
Φ
T
k+1
Φ
k+1
+ λD
T
k+1
D
k+1
−1
φ
T
k+1
ˆ
Y
k+1
(8)
For better readability we use substitution of P
−1
k+1
from
equation (15) and using the recursive versions of Φ
and Y we get
ˆx
k+1
= P
k+1
Φ
T
k+1
ˆ
Y
k+1
P
−1
k+1
ˆx
k+1
= Φ
T
k+1
ˆ
Y
k+1
(9)
Similarly for k
th
instance
Φ
T
k
ˆ
Y
k
= P
−1
k
ˆx
k
(10)
Resuming from equation (9) we get
ˆx
k+1
= P
k+1
Φ
T
k
ˆ
Y
k
+ φ
T
ˆy
k+1
By using the value of Φ
T
k
Y
k
from equation (10) we
get
ˆx
k+1
= P
k+1
P
−1
k
ˆx
k
+ φ
T
ˆy
k+1
By using the value of P
−1
k
from equation (16) we
get
ˆx
k+1
= P
k+1
P
−1
k+1
− (φ
T
φ + λd
T
d)
ˆx
k
+ φ
T
ˆy
k+1
=
P
k+1
P
−1
k+1
− P
k+1
(φ
T
φ + λd
T
d)
ˆx
k
+ P
k+1
φ
T
ˆy
k+1
= P
k+1
P
−1
k+1
ˆx
k
− P
k+1
(φ
T
φ + λd
T
d) ˆx
k
+ P
k+1
φ
T
ˆy
k+1
= ˆx
k
− P
k+1
φ
T
φ + λd
T
d
ˆx
k
+ P
k+1
φ
T
ˆy
k+1
ˆx
k+1
= ˆx
k
+ P
k+1
φ ˆy
k+1
− (φ
T
φ + λd
T
d) ˆx
k
(11)
by using the assumption from equation (6) we can fur-
ther assume that
ˆy
k+1
= y
k+1
− λd
T
c
Hence final equation (11) for RFusion will be-
come
ˆx
k+1
= ˆx
k
+ P
k+1
φ(y
k+1
− λd
T
c) − (φ
T
φ + λd
T
d) ˆx
k
(12)
From the fundamental regularized LSE equation
ˆx
k+1
=
Φ
T
Φ + λD
T
D
−1
Φ
T
y
Let P
k
=
Φ
T
Φ + λD
T
D
−1
(13)
P
−1
k
=
Φ
T
Φ + λD
T
D
(14)
For the recursive part we can extend the Φ and D
matrices as follows
Φ
k+1
=
Φ
K
φ
and D
k+1
=
D
k
d
Recursive Total Variation Filtering Based 3D Fusion
79

Then equation (14) will become
P
k+1
=
Φ
K
φ
Φ
K
φ
+ λ
D
K
d
D
K
d
−1
P
k+1
=
Φ
T
k
Φ + φ
T
φ + λD
T
k
D + λd
T
d
−1
P
k+1
=
(Φ
T
k
Φ + λD
T
k
D) + φ
T
φ + λd
T
d
−1
P
k+1
=
P
−1
k
+ (φ
T
φ + λd
T
d)
−1
(15)
P
−1
k+1
= P
−1
k
+ (φ
T
φ + λd
T
d)
P
−1
k
= P
−1
k+1
− (φ
T
φ + λd
T
d) (16)
P
k+1
=
P
−1
k
+
φ
T
φ I
I
λd
T
d
−1
For simplicity assuming
B =
φ
T
φ I
and C =
I
λd
T
d
we get
P
k+1
=
P
−1
k
+ BC
−1
Using matrix inversion lemma
(A + BC)
−1
= A
−1
− A
−1
B(I +CA
−1
B)
−1
CA
−1
P
k+1
= P
k
− P
k
B(I +CP
k
B)
−1
CP
k
(17)
Formulation of D Matrix
Since we are dealing with elements in a 2D matrix
each cell and respective neighboring cells can be ac-
cessed by their respective spatial information (i.e. row
and column values in case of 2D), however actual im-
plementation of proposed technique is carried to han-
dle 3D depth fusion. For each voxel value a
k
(where
0>k>support) in vector SDF signal v, assuming that
i and j are index values of row and column respec-
tively for accessing a
k
in equation (15), finite differ-
ence in vector form can be written as
∇a
k
=
∇
xx
∇
yy
∇
xy
∇
yx
∇
xx
∇
yy
∇
xy
∇
yx
=
a(i − 1, j) − 2a(i, j) + a(i + 1, j)
a(i, j − 1) − 2a(i, j) + a(i, j + 1)
a(i+1, j+1)−a(i+1, j)−a(i, j+1)+2a(i, j)−a(i−1, j)−a(i, j−1)+a(i−1, j−1)
2
a(i+1, j+1)−a(i+1, j)−a(i, j+1)+2a(i, j)−a(i−1, j)−a(i, j−1)+a(i−1, j−1)
2
(18)
Elements of equation (15) can be separated depend-
ing upon if the elements are in the incident ray which
is currently being fused or in neighboring cell. The
separated elements can then be written using multiple
matrix form as
∇a
k
= D
k
v +C
k
(19)
where
D
k
=
−2 1 0 ... 0
−2 0 0 ... 0
1 0.5 0 ... 0
1 0.5 0 ... 0
C
k
=
a(i − 1, j)
a(i, j − 1) + a(i, j + 1)
a(i+1, j+1)−a(i+1, j)−a(i−1, j)−a(i, j−1)+a(i+1, j+1)
2
a(i+1, j+1)−a(i+1, j)−a(i−1, j)−a(i, j−1)+a(i+1, j+1)
2
D
k
and C
k
matrix in equation (19) are only valid
2
for a
k
(where k = 1). However by using the same
method, composite D and C matrix can be formulated
and written as
∇v =
∇a
1
∇a
2
...
∇a
n
=
D
1
D
2
...
D
n
v +
C
1
C
2
...
C
n
∇v = Dv +C (20)
Matrix C from equation (20) is used in the later stages
of RFusion to incorporate the integrated smoothing.
2
Values of D and C matrices are calculated on run time,
hence elements depend upon the angle of ray, size of SDF
width etc.
SIGMAP 2016 - International Conference on Signal Processing and Multimedia Applications
80
