
Grasp Quality Improvement with Particle Swarm Optimization
(PSO) for a Robotic Hand Holding 3D Objects
Venkataramani Rakesh
1
, Utkarsh Sharma
2
, Murugan S
1
, Venugopal Srinivasan
1
and Thondiyath Asokan
2
1
Robotics & Remote Handling Section, Indira Gandhi Centre for Atomic Research, Chennai-603 102, India
2
Department of Engineering Design, Indian Institute of Technology Madras, Chennai-600 036, India
Keywords: Grasping, Robot Hand, Synthesis, Particle Swarm Optimisation (PSO), Grasp Quality.
Abstract: Automated grasp planning for robotic hands is a complex problem when compared with the ease with which
human hands grasp objects. Research in robotic grasp synthesis attempts to find novel ways in which a
stable grasp can be achieved reliably. In this work, we present a grasping methodology that achieves
optimized force closure grasps on 3D irregular objects. 3D objects in the form of polygonal meshes are
parameterized to 2D shapes in order to reduce the search space by constraining robotic hands finger tips to
be in contact with the objects surface. We use a Particle Swarm Optimization (PSO) based framework to
optimize an initial grasp. The scheme has been validated on test-case 3D objects represented with surface
tessellation for a 5-fingered DLR robotic hand.
1 INTRODUCTION
Robotic arms are one of the most common
applications in automation and intelligence based
systems. The robot arm is usually a serial link
manipulator, and is provided with a parallel jaw
gripper fitted as the end effector. Parallel jaw
grippers suffer major disadvantages, while handling
objects to be handled with arbitrary shapes and
uneven surfaces (Shimoga, 1996). Better robot
grasping abilities are assured by fitting robotic arms
with end effectors, which are adept at matching
human hand-like motions. The research in the field
of robot grasping tries to address three different
issues viz. existence, analysis and synthesis of
grasps. The study of robot hands and grasping are
sharply differentiated from the design of fixtures and
industrial grippers, which have extensive usage
currently. Moreover, grasping research (especially
synthesis) is devoted to generating schemes to find
the best possible location to hold the object.
The design of the 3-fingered robot hand (Mason
and Salisbury, 1985) largely initiated the tone for
research in the field along with studies on
prehension (Asada, 1979). The notion of grasp
quality was introduced in order to provide a metric
for successful grasps, (Ferrari and Canny, 1992).
This was defined as the radius of the largest wrench
space ball, centered at the origin, which can just fit
within the unit grasp wrench space. Mathematical
analyses were also presented by comparing various
metrics (Mishra, 1995).
Grasp synthesis problems are tackled using
analytical and empirical methods in literature and
using a few other different grasp quality measures
were also reviewed (Suárez et al., 2006).
Analytical grasp synthesis studies are based on a
combination of geometric, kinematic and dynamic
formulations. Modeling and solving problems by
this approach is computationally intensive. The
earliest works (Lakshminarayana, 1978) specify
sufficient conditions of form closure of 2-D and 3-D
objects. Thereafter, necessary conditions for 4-finger
force closure grasps were published (Ponce et al.,
1997).
Empirical methods give emphasis to techniques
co-relating object features with robot hand. A case in
example (Li et al., 2007) uses 3-D models of the
object for shape matching with samples from a
database of grasps. Another offshoot of this thread
uses learning algorithms (Romero et al., 2008)
where grasp images are searched for fundamental
matching with the one demonstrated.
It is interesting to note that robotics research in
grasping also leans on the study of an elaborate
taxonomy of human grasps (Cutkosky, 1989). As
Rakesh, V., Sarma, U., S, M., Srinivasan, V. and Asokan, T.
Grasp Quality Improvement with Particle Swarm Optimization (PSO) for a Robotic Hand Holding 3D Objects.
DOI: 10.5220/0005959901850191
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 2, pages 185-191
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
185

mentioned, in the introduction, the pinnacle of grasp
perfection would need to exploit designs based on
anthropomorphism (even partially) in order to mimic
the human hand (Biagiotti et al., 2004).
As a natural consequence, due to the complexity
of such hands, attempts are made to reduce the search
spaces (Li et al., 2003). In analytical methods, the
complexity is reduced by accounting for the
constraints formed by the coupling of various finger
joints. The Barrett Hand Grasper uses such interlink
transmissions reducing the total number of actuators
(Townsend, 2000). Grasp synthesis algorithms are
often handicapped by the limitation of the input
representation of the objects and/or the semantics of
the required tasks. This naturally introduces errors in
the object registration/approximation by the grasp
planner. Hence the synthesis strategy should fortify
itself by generating a broad set of contact locations
which in essence would lead for a robust grasp.
Independent Contact Regions (ICR) provided leeway
in the finger positioning (Nguyen, 1988).
Efforts are also directed in empirical methods
towards the simplification of 3-D shapes by planar
representation (Morales et al., 2006). A similar
work (Aarno et al., 2007) utilizes representations
based on 3-D contours.
The problem of grasp scheme generation is
exacerbated by the infinite types of objects to be
handled by numerous hand shapes/designs. Hence,
there is an ever-present incentive to devise novel
schemes for grasp synthesis which provide quality
grasps elegantly.
2 PROBLEM OUTLINE
The objective of the present work is to find quality
grasps on 3D objects. The grasps are synthesized for
the robotic DLR/HIT Hand II model. The DLR/HIT
Hand II has been jointly developed by DLR (German
Aerospace Center) and HIT (Harbin Institute of
Technology). The objects, for which the grasps are
evolved, are represented with surface tessellation.
2.1 Grasp Planner Inputs
A triangular tessellation mesh has been used for the
objects used for the trial experiments to generate
grasp and validate the scheme. The density of the
tessellation set, Ω, determines the detail with which
the object features are represented. The points on the
object surface are provided with position vectors, p
i
with respect to the centre of mass (C.M) of the
object and the unit normal vector, n
i
of the
corresponding triangle.
2.2 Wrenches and Contact
The robot hand finger-tip on the object surface
generates a force on the object at the surface point.
A corresponding torque with respect to the C.M. is
also created. The concatenation of this force-torque
vector represents the associated wrench, ω
r
applied
by the finger-tip on the object surface at a location
denoted by i. A Coulomb friction model has been
assumed, in the present work, for point contact
between the finger-tip and the object. In order to
assure that there is no slippage between the object
and the robot hand at the finger-tips, it is necessary
that the applied contact force vector should lie
within the friction cone. The friction cone is
linearized with an 8-sided pyramid. The coefficient
of friction used is taken as 0.4
2.3 Grasp Quality Optimization
In the current work, the quality of the grasp is
improved by particle swarm optimization (PSO), a
heuristic method, which performs a global search.
The global search is performed over the object
surface points with a view to increase the grasp
quality. Hence, the objective function, for the
current work, is the grasp quality.
The grasp quality objective function, for
optimization, is formed with a component which uses
the condition number of the hand Jacobian, H. A
better quality (of this component) for the grasp
indicates a better manipulability of the grasped object
by the hand. This is expressed as the ratio of the
maximum and minimum singular values of H i.e.
n
c
(H) (Shimoga, 1996). The best quality for this
component i.e the best value possible is 1. In addition
to this factor, a variation of the criterion of largest ball
(Ferrari and Canny, 1992) grasp quality is used here,
which is the radius of the largest ball, ρ, within the
convex hull formed by the wrenches, irrespective of
the reference (Teichmann, 1996). The expression for
the grasp quality, Q, as a combination with these two
components, with normalization, is expressed as,
Q =
ρ
–
1000[1/n
c
(H)])
(1)
2.4 Particle Swarm Optimization
The implementation of the PSO, in the current work,
utilizes combination of the pattern-search method
with the traditional PSO global search algorithm
(Vaz et al., 2007).
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
186
The individual finger-tips of the five-fingered
robot hand touch the object on the surface points. An
initial FC grasp is generated using trial and error.
The finger-tip contact points on the object’s surface
are then mapped to the 2d parameterized surface as
discussed in the section 3. These set of five points
along with hands position and orientation, formed as
a vector are taken as one of the initial population
member where others are chosen randomly. The
parameterized surface is chosen as the solution space
over which the PSO searches for the solution. The
linear equations of the boundaries of the 2d
parameterized surface are taken as the lower and
upper bounds for the solution space.
The swarm size for the PSO is taken as 42. The
social and cognition parameter values are both 0.5.
The initial and final inertia weights are 0.9 and 0.4
respectively. A maximum function evaluation of
10,000 is provided as the stopping criterion for the
optimization method.
3 MESH MAPPING
The object surface has a specific discrete set of
points, available to the planner, on which the grasp
search can be conducted. This simple and efficient
procedure, though adequate can be further mapped
to a modified surface which allows a thorough and
continuous search by the use of mesh
parameterization (Floater et al., 2005, and Hormann
et al., 2007).
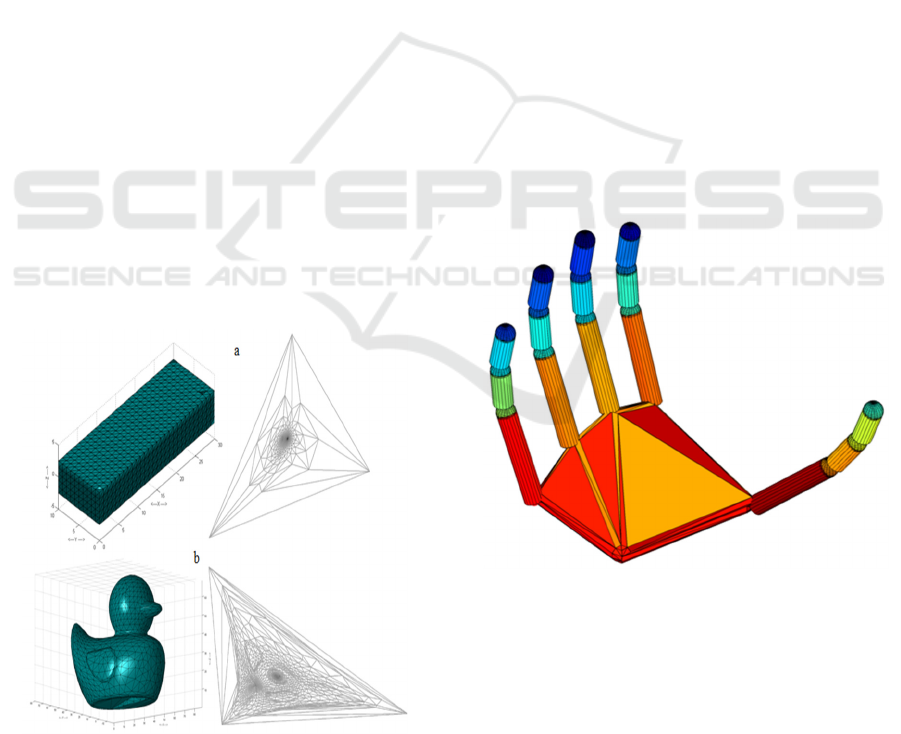
Figure 1: The 2D parameterizations of the surface
tessellations for the 3D Objects used for validating the
grasp synthesis schema (a) Rectangular parallelepiped. (b)
Duck.
The 3D object surface mesh is parameterized to
an equivalent 2D surface. A triangle constituting a
unit of initial tessellation set, Ω, is removed. This
creates an equivalent homeomorphic disc from the
remaining surface of the 3D object.
In order to ensure and enable a continuous search
region on the object surface, Barycentric co-
ordinates are used. The 3D objects for the
experimental trials, in this work, are shown in Figure
1 (Rakesh et al., 2015) along with the corresponding
2D mesh parameterizations. The search for quality
grasps are carried out on a rectangular parallelepiped
and a duck as the 3D objects as shown and is
described in the subsequent sections.
4 EXAMPLE CASE-STUDIES
A DLR robot hand with five fingers has been used
on two objects within the MATLAB frame-work for
testing the synthesis of the quality grasps as
discussed hitherto. The objects consist of 3D models
of a rectangular parallelepiped and a duck as shown
in Figure 1. The parallelepiped surface consists of
1879 tessellation triangles. On the other hand, the
duck is represented with moderate surface
tessellation of 2055 triangles.
Figure 2: The DLR hand used for the case-studies.
The DLR robot hand, shown in Figure 2, consists
of five fingers. For each fingers, the segments l
1
is
55 mm. The segments l
2
and l
3
are equal and
represent a length of 25 mm each. The
abduction/adduction movement is represented by θ
0
at the base of each finger and the in-plane degree-of-
freedom (DOF) for the joint at the same location is
denoted by θ
1
. Hence, the base of each finger
consists of 2-DOF joint. The subsequent in-plane
Grasp Quality Improvement with Particle Swarm Optimization (PSO) for a Robotic Hand Holding 3D Objects
187
finger joint rotations are denoted by θ
2
and θ
3
which
are equal to each other, in the present case.
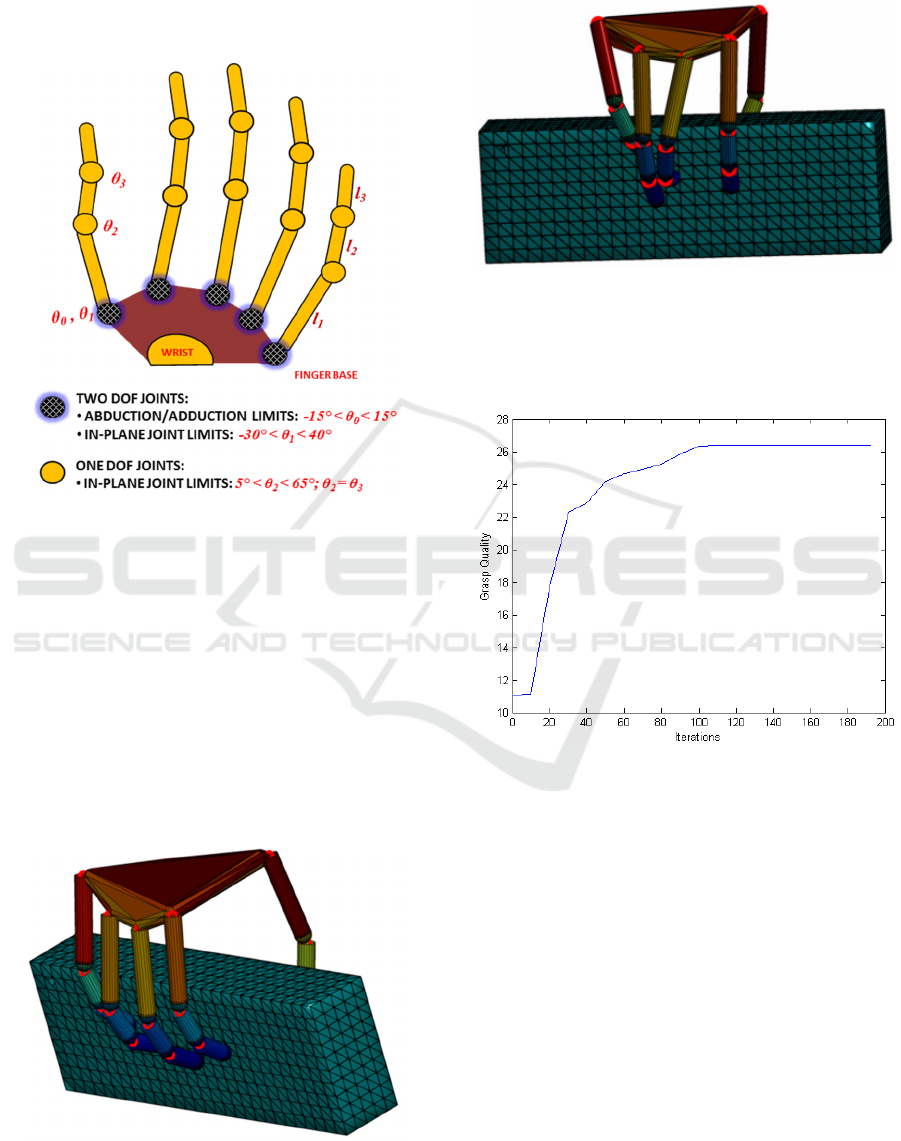
The skeletal connectivity diagram of the DLR
hand is shown in Figure 3. The inverse kinematics
relations for the fingers are detailed in the Appendix.
Figure 3: The skeletal connectivity diagram for the DLR
hand used for the case-studies.
The Syngrasp frame-work (Malvezzi et al., 2013)
within the MATLAB programming environment has
been used to implement the scheme, on a personal
computer with Intel i3, 2.2GHz processor.
4.1 Case-study: Rectangular
Parallelepiped
The DLR robot hand is initialized with a grasp as
shown in Figure 4 for the rectangular parallelepiped.
The initial grasp quality is 11.08.
Figure 4: The initial grasp of the DLR hand on the
rectangular parallelepiped.
The optimized grasp with a final grasp quality of
26.38 is generated as shown in Figure 5.
Figure 5: The final grasp of the DLR hand on the
rectangular parallelepiped.
The iteration progress during the optimization for
increasing the grasp quality is given in Figure 6.
Figure 6: The increase in the grasp quality for the DLR
hand and the rectangular parallelepiped.
The total time take for the optimization run is 47.6 s.
4.2 Case-study: Duck
The duck model with a moderate tessellation value
of 2055 triangles forms the second sub-case for the
test studies in this work.
The initial grasp with a quality of 13.036 is
shown in Figure 7.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
188
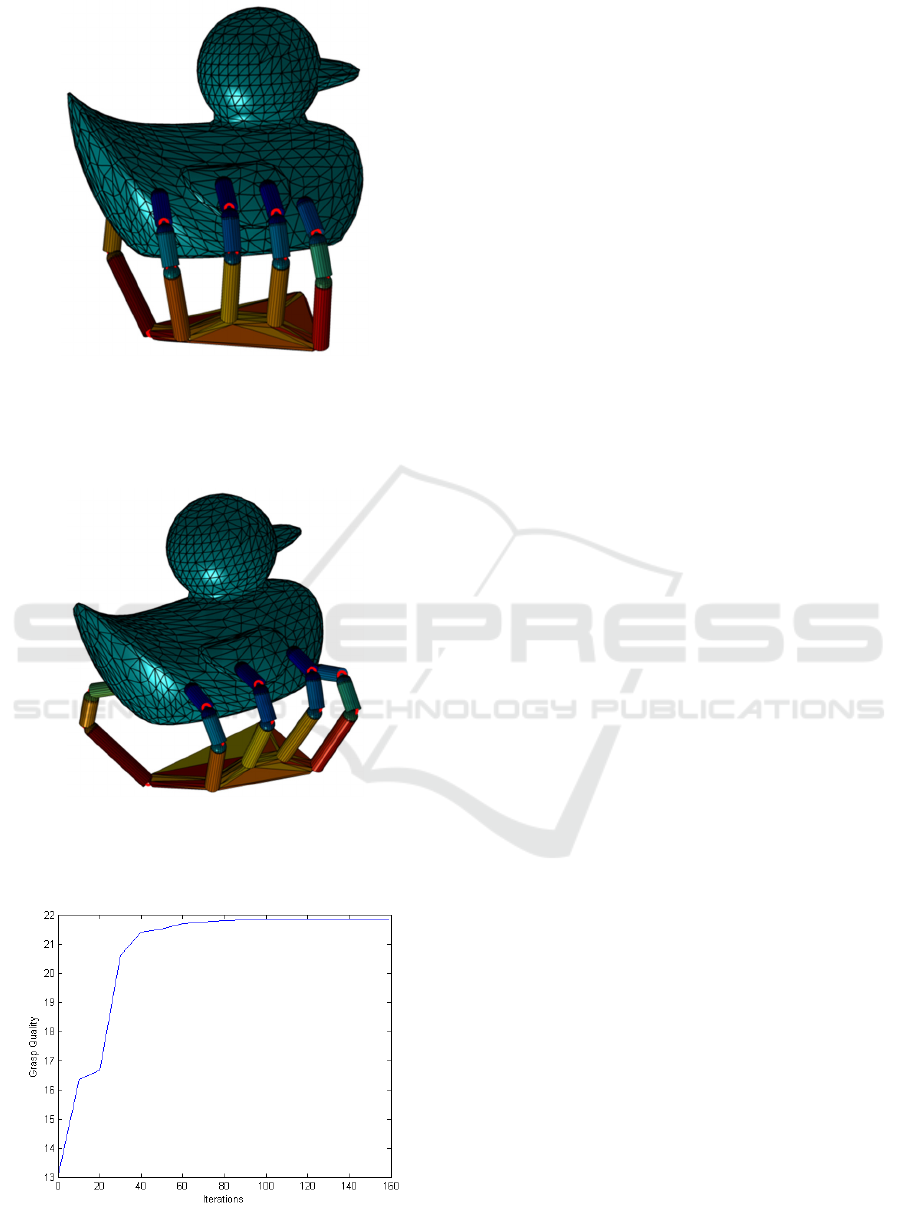
Figure 7: The initial grasp of the DLR hand on the duck.
On implementing the PSO for increasing the
grasp quality the final grasp generated is shown in
Figure 8.
Figure 8: The final grasp of the DLR hand on the duck.
The total time taken for improving the grasp
quality to 21.85 for the duck is 90 s.
Figure 9: The increase in the grasp quality for the DLR
hand and the duck model.
The progress of the iterations is shown in Figure
9.
5 CONCLUSIONS
The current work has formulated a scheme for grasp
quality optimization with a robot hand for test case
objects, based on PSO. The routine performs fairly
well over a simple model like parallelepiped and
also a comparatively complex geometrical model of
duck. The reasonably fast run-times show the
efficacy of the formulation for generating quality
grasps quickly. Using an analytical method for
computing inverse kinematics of the hand
contributes to the lower times in grasp computation.
It is difficult to process complex objects
analytically with the objective of automation in
grasp synthesis. Moreover, in most of the applicable
cases the computational times are disparagingly
high. In this context, the current work has suitably
validated the synthesis of quality grasps in a virtual
environment. The applicability of the method on a
simulated test bench helps to eliminate expensive
hardware trials and manufacturing cycles, while
reducing the implementation costs. Hence, the current
work has been a successful endeavour for quality
grasp synthesis and optimization, as a generalized
planner for a different of objects, using PSO.
ACKNOWLEDGEMENTS
The authors gratefully acknowledge the
encouragement provided by Dr. A. K. Bhaduri,
Director, Metallurgy & Materials Group, Indira
Gandhi Centre for Atomic Research, during this
study.
REFERENCES
Shimoga, K., B., 1996. Robot grasp synthesis algorithms:
A survey. International Journal of Robotics
Research,15(3), pp 230–266.
Mason, M. T., Salisbury, J. K., 1985. Robot Hands and the
Mechanics of Manipulation. MIT Press Cambridge,
MA.
Asada, H., 1979. Studies on Prehension and Handling by
Robot Hands with Elastic Fingers. PhD Thesis, Kyoto
University.
Ferrari, C., Canny, J. 1992. Planning optimal grasps. In
ICRA’92, Proceedings of the IEEE International
Conference on Robotics and Automation (Nice,
Grasp Quality Improvement with Particle Swarm Optimization (PSO) for a Robotic Hand Holding 3D Objects
189
France, May 12-14, 1992). DOI=
http://dx.doi.org/10.1109/ROBOT.1992.219918.
Mishra, B., 1995. Grasp metrics: Optimality and
complexity. New York, NY, USA. Technical Report.
Suarez, R., Roa, M. , Cornella, J. 2006. Grasp quality
measures. Technical Report. IOC-DT-P 2006-10,
Universitat Politècnica de Catalunya, Institut
d’Organització i Control de Sistemes Industrials.
Lakshminarayana, K., 1978. Mechanics of Form Closure.
ASME paper 78-DET-32.
Ponce, J., Sullivan, S., Sudsang, A., Merlet, J.P., 1997. On
Computing Four-finger Equilibrium and Force-
Closure Grasps of Polyhedral Objects. International
Journal of Robotics Research, 16:(1):1135.
Li, Y., J.L., Fu, Pollard, N., 2007. Data-Driven Grasp
Synthesis Using Shape Matching and Task-Based
Pruning. IEEE Transactions on Visualization and
Computer Graphics, 13:(4):732–747.
Romero, J., Kjellstrm, H., Kragic, D., 2008. Human-to-
robot mapping of grasps. In IEEE/RSJ International
Conference on Intelligent Robots and Systems,
Workshop on Grasp and Task Learning by Imitation.
Cutkosky, M., 1989. On Grasp Choice, Grasp Models,
and the Design of Hands for Manufacturing Tasks.
IEEE Transactions on Robotics and Automation. (5.3),
pp. 269-279.
Biagiotti, L., Lotti, F., Melchiorri, C., Vassura, G., 2004.
How Far is the Human Hand? – A Review on
Anthropomorphic Robotic End-effectors. Internal
Report. University of Bologna.
Li, J.W., Liu, H. Cai, H. G., 2003. On Computing Three-
Finger Force-Closure Grasps of 2D and 3D Objects.
IEEE Transactions on Robotics and Automation,
19:(1).
Townsend, W., 2000. Barrett Hand Grasper. Journal of
Industrial Robots, Vol. 27, No.3, pp. 181-188.
Nguyen, V. D., 1988. Constructing Force-Closure Grasps.
International Journal of Robotics Research, 7(3):3-16.
Morales, A., Sanz, P. J., del Pobil, A. P., Fagg A., 2006.
Vision-based Three-finger Grasp Synthesis
Constrained by Hand Geometry. Robotics and
Autonomous Systems, Vol. 54, pp. 496-512.
Aarno, D., Sommerfeld, J., Kragic, D., Kalkan, S.,
Wörgötter, F., Pugeault, N., Kraft, D., Krüger, N.,
2007. Early reactive grasping with second order 3D
feature relations. In The IEEE International
Conference on Advanced Robotics.
Teichmann, M., 1996. A grasp metric invariant under rigid
motions. In ICRA’92, The IEEE International
Conference on Robotics and Automation, pp. 2143–
2148.
Vaz, A.I.F., Vicente, L. N., 2007. A particle swarm
pattern search method for bound constrained global
optimization. Journal of Global Optimization. (39),
197-219.
Floater, M. S., Hormann, K., 2005. Surface
parameterization: a tutorial and survey. Chapter In
Advances in Multiresolution for Geometric Modelling,
Mathematics and Visualization, pages. Springer,
Berlin, Heidelberg, 157—186.
Hormann, K., Lévy, B. Sheffer, A., 2007. Mesh
parameterization: theory and practice. In SIGGRAPH
'07, ACM SIGGRAPH 2007 courses, Article 1 (ACM,
New York, NY, USA).
Venkataramani Rakesh, Utkarsh Sharma, B.P.C. Rao, S.
Venugopal, T. Asokan. Improving Grasp Quality for
3D Objects Using Particle Swarm Optimization (PSO)
and Mesh Parameterization. In: Proceedings of The
2nd International Conference of Robotics Society of
India, Advances in Robotics (AIR’15) Goa, India, July
2015.
Malvezzi, M., Gioioso, G., Salvietti, G., Prattichizzo, D.,
Bicchi, A., 2013. SynGrasp: a MATLAB Toolbox for
Grasp Analysis of Human and Robotic Hands. In The
IEEE International Conference on Robotics and
Automation, Karlsruhe, Germany.
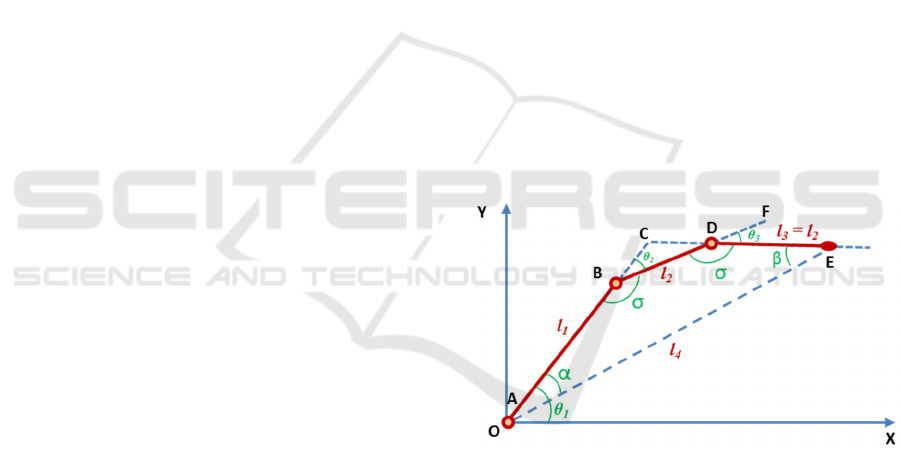
APPENDIX
The inverse kinematics for a particular finger can be
derived geometrically. Analogous relations are valid
for each of the fingers. It may be noted that
adduction/abduction movement (θ
0
) about the finger
base gives rotation about the Y-axis. At a specific
abduction/adduction angle (θ
0
) the in-plane
configuration of the finger is shown in Figure 10
along with the corresponding relevant nomenclature.
Figure 10: Geometical method to for the inverse
kinematics to find
θ
1
and θ
2
(= θ
3
)
.
The finger-tip position is at E, and the base of
the finger starts from A, which coincides with the
origin of the rectangular co-ordinate system at (0,0).
For the inverse kinematics, the finger-tip position at
E (x
E
, y
E
), is knows in terms of the co-ordinate
values.
Here,
AB =
l
1
= 55 mm ; BD =
l
2
= 25 mm = DE
and AE =
l
4
(A.1a)
∠CBD = ∠FDE
(A.1b)
Hence, ∠ABD = ∠BDE
(A.1c)
Since, BC = -
l
2
/(2Cos σ) so,
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
190

AC =
l
1
-
l
2
/(2Cos
σ
)
;
CE =
l
2
-
l
2
/(2Cos
σ
)
(A.2)
In ΔACE,
A
E
2
= A
C
2
+ C
E
2
- 2 AC.CE.Cos (2σ – π
)
(A.3)
Taking only the negative solution as
meaningfully realizable, we have, Substituting Cos σ
= x and using (A.1a) and (A.2), in the above
equation, we have
4
x
2
=
(2x
l
1
-
l
2
)
2
+(2x
l
2
-
l
2
)
2
+2(2x
l
1
-
l
2
)
. (2x
l
2
-
l
2
)
.( 2
x
2
-1
)
(A.4)
The solution for the above bi-quadratic
equation yields the value of x as
x = ±[-
l
2
{
(4
l
1
)
3
–9(
l
1
)
2
l
2
+6
l
1
(
l
2
)
2
-4
l
1
(
l
4
)
2
-(
l
2
)
3
}
+
l
1
l
2
+ (
l
2
)
2
)]
1/
2
.(4.
l
1
l
2
)
(A.5)
Taking only the negative solution as
meaningfully realizable, we have,
σ = Co
s
-
1
x thereby,
θ
2
=
θ
3
= π -
σ
(A.6)
In
ΔACE,
S
i
n
α = -(CE.
Si
n
2
σ
)/AE
Using (1a) and (2), in the above equation, we
have
α =
Si
n
-
1
[{
-
l
2
Si
n
σ(2Cos
σ
-1)
}
/
l
4
]
(A.7)
Thence,
θ
1
=
∠EAX+ α
(A.8)
where , ∠EAX = tan
-1
(y
E
/x
E
)
(A.9)
Grasp Quality Improvement with Particle Swarm Optimization (PSO) for a Robotic Hand Holding 3D Objects
191
