
Analysis of a Mobile System to Register the Kinematic Parameters in
Ankle, Knee, and Hip based in Inertial Sensors
V´ıctor H. Flores-Morales, Byron G. Contreras-Bermeo, Freddy L. Bueno-Palomeque
and Luis J. Serpa-Andrade
Grupo de Investigaci´on en Ingenier´ıa Biom´edica GIIB-UPS, Universidad Polit´ecnica Salesiana, Cuenca, Ecuador
Keywords:
Kinematic Parameters, Joint Angles, Wearable System, Inertial Sensors.
Abstract:
Understanding the lower-extremity kinematic during daily and sport activities provides important information
in order to detect abnormalities in human gait or analyse the execution of different sport techniques. Following
this approach, this paper presents a kinematic data collection system of human gait in the lower extremities
using six inertial sensors MPU 6050 and a microcontroller ATMEGA328P-PU. Six tests were performed
and the angular variation was recorded during the execution. The curves obtained during the tests showed a
maximum error of ±4, ±1, and -4 degrees at the Yaw, Pitch, and Roll angles respectively. This study proposes
a mobile and inexpensive system for detecting the angular variation in reduced speed movements, ideal for
goniometric measurement or analyse the techniques in certain sports.
1 INTRODUCTION
The biomechanical analysis of the human gait us-
ing optical tracking system has been widely applied
to evaluate and diagnose different pathologies. Ad-
ditionally to determine gait patterns in populations,
monitor rehabilitation techniques, and analyse sport
techniques. However, these systems have been used
in controlled environments, limited by the study area,
with restrictions in the person’s movement, the equip-
ment’s weight, and the high cost of its implemen-
tation. As an alternative, in the last years, the ac-
celerometers and gyroscopes have been used to mea-
sure the kinematics of the human body. These sen-
sors located on the person’s body allow extending the
movement range in a larger amount of environments
(Foerster et al., 1999; Rueterbories et al., 2010; Liu
et al., 2009; Callaway, 2015; Mangin et al., 2015).
The biomechanical analysis of the human gait for
clinic diagnosis has permitted to study pathological
postures, measure or quantify the effects of a deter-
mined treatment, and compare the different proto-
cols developed (Wong et al., 2007). Several meth-
ods have been proposed in the literature to address
this subject such as the proposal to discriminate be-
tween asymptomatic patients and patients with Me-
dial Knee Osteoarthritis using accelerometers and gy-
roscopes (Turcot et al., 2008) or the system to ambu-
latory monitor in Parkinson’s patients (Hobert et al.,
2014). Focusing in older people, an airbag mobile
system for fall protection was proposed using a belt,
inertial sensors and a compressed air actuator that ac-
tivates two airbags for hips protection once the sen-
sors detect an acceleration produced by the person fall
(Shi et al., 2009).
The different tests developed to quantify the spe-
cific movements in contact sports have revealed the
generation of errors in the contact and in the fast and
abrupt change of speed during a collision (Chambers
et al., 2015); it has motivated to search for new alter-
natives to improve the acquisition of kinematic data.
Considering other sport, a wearable system was pro-
posed for monitoring track cycling, using accelerom-
eters to register speed, acceleration, and cadence dur-
ing the development of the technique (Lattes et al.,
2013).
Inertial method and an infrared camera system
were compared using sensors located on the athlete’s
forearm to analyse the accelerations during the arm-
stroke on a swimming bench (Lee et al., 2011). In
the same way, the characteristic of the main tem-
poral phases of front crawl on swimming were de-
tected, through algorithm to determine angular veloc-
ities and accelerations. The method was compared
with a video system showing similar results (Dadashi
et al., 2011).
Recent technology miniaturization has motivated
to propose smart new wearable systems for monitor-
Flores-Morales, V., Contreras-Bermeo, B., Bueno-Palomeque, F. and Serpa-Andrade, L.
Analysis of a Mobile System to Register the Kinematic Parameters in Ankle, Knee, and Hip based in Inertial Sensors.
DOI: 10.5220/0005934800290033
In Proceedings of the 4th International Congress on Sport Sciences Research and Technology Support (icSPORTS 2016), pages 29-33
ISBN: 978-989-758-205-9
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
29
ing continuously the patient’s healthcare (Chan et al.,
2012). This research presents a mobile system that
captures and describes the angular variations in six
different movements, performed by an asymptomatic
person. The system features a quantification method
that helps specialists to complement the biomechani-
cal analysis.
2 MATERIALS AND METHODS
Adaptive physical and anatomical characteristics of
a person outfit was designed, to acquire and regis-
ter the angles of lower extremities during different
tests. This outfit consists of: a hip girdle subject
into the joint to prevent slipping, two knee supports
without pad for a better mobility in the joint, and two
open anklets to preventslipping. The sensors were lo-
cated where extended rotation occurs. The embedded
system collects the data sent by the inertial sensors
through an Inter-Integrated Circuit (I2C) communica-
tion for a posterior analyses. The kinematic and an-
gular data receipted were used to generate a file to
visualize, simulate and analyse the movements made
by the individual using OpenSim.
MPU 6050 inertial sensors were used as the basis
of the system to acquire the angles, a microcontroller
ATMEGA 328P-PU to collect and process the data, a
Max 485 to communicate, and a secure digital (SD)
card as storage device. A bidirectional I2C communi-
cation for sending and receiving data alternately was
used between the microcontroller and the inertial sen-
sors. The income data was transformed into angles
before sending it through a Serial Peripheral Interface
communication bus (SPI), to be organized and stored
in different files in a SD card.
The MPU 6050 contains a gyroscope to measure
the angular velocity on three axis independently. It al-
lows to calculate the rotate angle on each axis (Euler’s
angles:φ, θ, and ψ) using the uniform linear motion
equation. Gyroscope quaternion accumulates an error
in the course of time (drift). To complement data, a
global frame was used. A gravity vector was gener-
ated with the real values obtained in each instant of
time by the accelerometer to calculate the Pitch and
Roll angles through the equations 1 and 2. The gravity
quaternion contains information about the orientation
of the relative sensor’s axis to the ground reference
frame. The resultant quaternion is used to calculate
the angles compensating the drift error (Eq. 3):
Roll = sin
a
y
q
a
2
y
+ a
2
z
(1)
Pitch = sin
a
z
p
a
2
z
+ a
2
x
!
(2)
φ
θ
ψ
=
arctan
2(q
0
q
1
+q
2
q
3
)
1−2(q
2
1
q
2
2
)
arcsin[2(q
0
q
2
− q
3
q
1
)]
arctan
2(q
0
q
3
+q
1
q
2
)
1−2(q
2
2
q
2
3
)
(3)
A .mot file was generated for recreation of move-
ments in OpenSim with data from the SD card. Data
was processed by a low-pass Butterworth filter with
ten poles, with a sampling frequency of 100 Hz and a
cutoff frequency of 10Hz.
To determine the system’s error, a MPU 6050 ro-
tated about a fixed axis. Real data was recollected and
compared against the angles given by the algorithm
loaded in the microcontroller in different positions.
Error measured is presented in table 1.
Table 1: Measurement of error in the system.
Mean error
Error (Deg) Probability
Yaw 0.55 ± 4.80
±4 59%
Pitch 0.27 ± 0.72
±1 80%
Roll -3.62 ± 2.35
-4 52%
3 RESULTS AND DISCUSSION
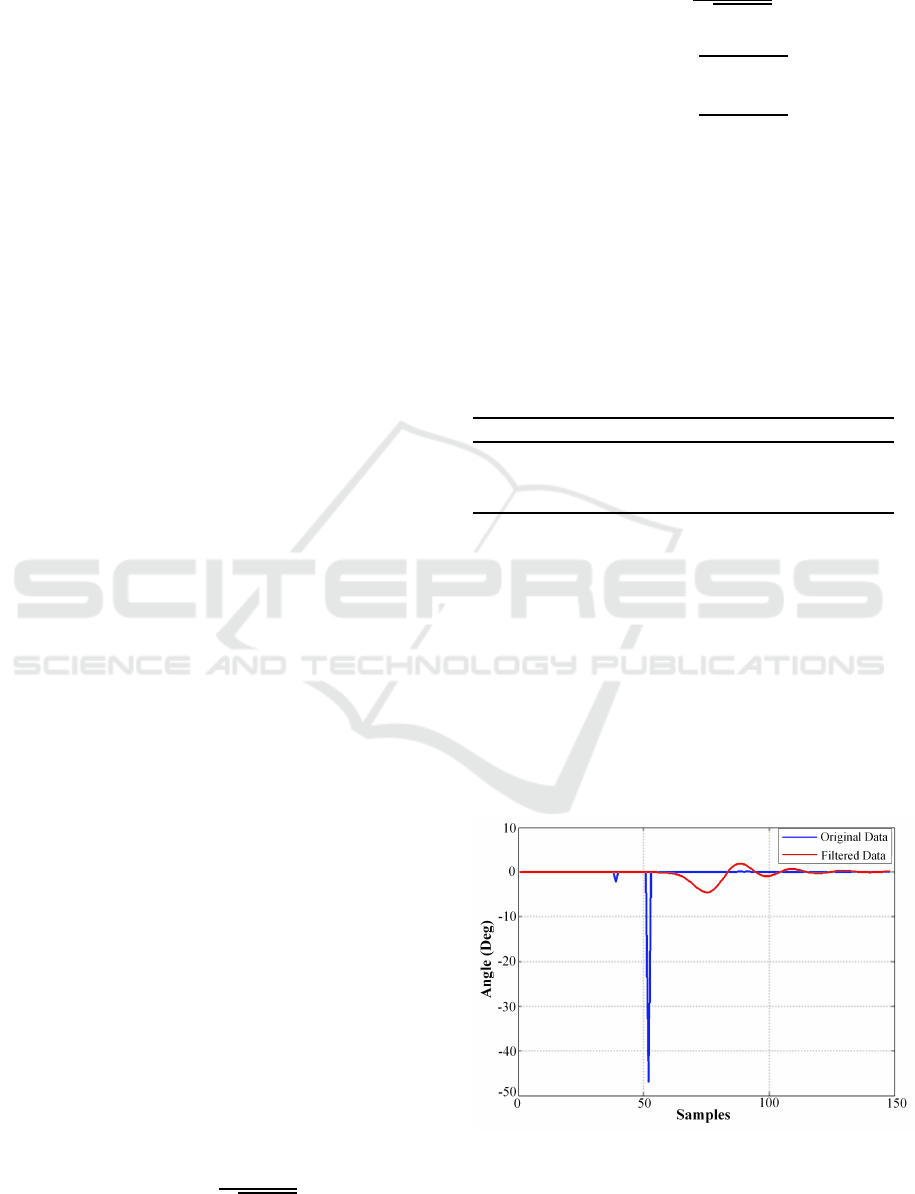
During the first test, two gyroscopes in a state of in-
ertia were connected to a microcontroller. Figure 1
shows the real obtained data by the sensor and after
to use the Butterworth filter with a cutoff frequency
of 10 Hz. During the second test, one gyroscope with
rotational motion was connected to a microcontroller.
Figure 2 shows the real obtained data and after to use
the filter.
Figure 1: Inertial stability test.
Six tests were performed with the system. All of
which were taken from a 24 years-old healthy man
icSPORTS 2016 - 4th International Congress on Sport Sciences Research and Technology Support
30
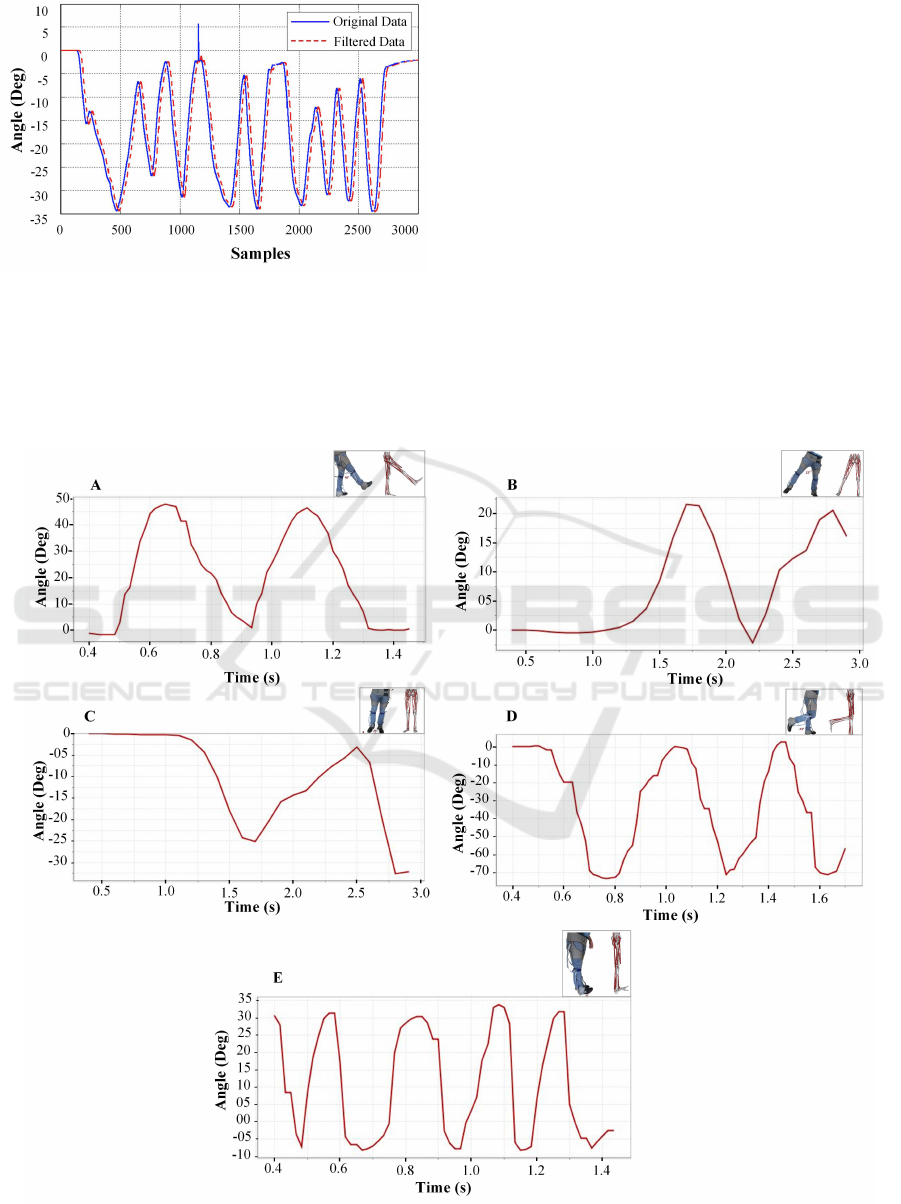
Figure 2: Filtering test with one gyroscope.
using the proposed system Figure 3 shows the differ-
ent tests developed using the system and the motion’s
curves generated.
• Figure 3-A shows the hip flexion of 48 degrees.
• Figure 3-B shows the angular variation during a
hip abduction of 22 degrees and an adduction of 0
degrees.
• Figure 3-C shows the angular variation during a
hip rotation of -25.
• Figure 3-D shows a knee flexion of -73 degrees
from rest.
• Figure 3-E shows an angle variation of 32 degrees
during the dorsal flexion and -10 degrees during
the plantar flexion.
Finally, the figure 4 shows curves corresponding
to the hip, knee and ankle during a complete gait
cycle in the right leg. The measurements were all
made in the sagittal plane using our proposed system
and the motion tracking software Kinovea 0.8.15 for
Windows, considering that this method is reliable and
valid (Balsalobre-Fern´andez et al., 2014).
This study presents a system based on inertial sen-
Figure 3: Curve describing: A) flexion in the hip, B) abduction and adduction in the hip, C) rotation in the hip, D) flexion in
the knee, and E) dorsal flexion and plantar flexion in the ankle.
Analysis of a Mobile System to Register the Kinematic Parameters in Ankle, Knee, and Hip based in Inertial Sensors
31
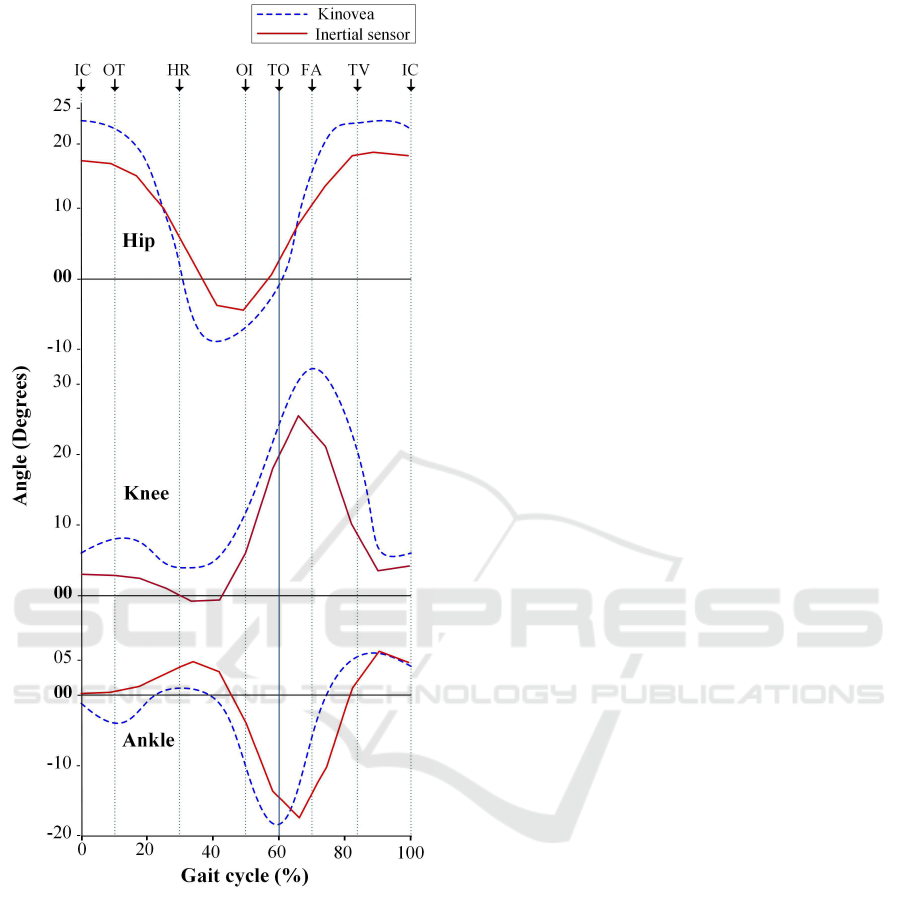
Figure 4: Angular variation of the right leg during a gait cy-
cle on the sagittal plane. IC = initial contact, OT = opposite
toe-off, HR = heel rise, OI = opposite initial contact, TO =
toe-off, FA = feet adjacent, and TV = tibia vertical.
sors to collect data from the kinematics of a per-
son and represent them graphically in an environment
where it is possible to make a detailed biomechanical
analysis. The wearable system allowed located the
sensors on the hip, knee, and ankle joints in order to
develop the different tests on an asymptomatic per-
son. The system has limitations in certain conditions
where movement and speed are high and complex.
Different studies have focused in decrease and to
eliminate the drift error occasioned by the use of gy-
roscopes (Alonge et al., 2014). In this field our study
used a gravity vector to decrease the accumulate error
as shown in table 1. This error is negligible consid-
ering the gyroscopes range used. The margin of error
as the mean were increased due to false information
caused by noise. The results obtained during the static
tests (Figure 2) show that the angular variation on the
joints have a small variation comparing with the final
angle reached during the six tests. The use of the filter
caused a shift in the curve of movement on the time
axis which is interpreted as a delay episode. As the
filter is the same for all the signals, the time delay is
the same for all of them. This shows that the delay is
irrelevant in this application since they are not being
displayed in real time (Figure 2).
Figure 3 shows the angle variation of the volun-
teer’s right leg registered with our system during the
execution of six different tests. To validate the value
obtained, we used a graduated device to compare
the measurements registered. Additionally, figure 4
shows the average angle obtained during a gait cycle
test, considering it as a normal speed activity. Our
system shows a delayed measurement, comparing it
with the results provided by Kinovea system. Partic-
ularly, in the hip joint, the maximum angular varia-
tion registered is 7.0
◦
at the initial contact. The maxi-
mum variation on the knee is 9.1
◦
on the feet-adjacent
phase and finally, on the ankle, the maximum varia-
tion is 5.0
◦
on the opposite toe-off phase. The gait cy-
cle time of 1.44 s affects directly on the measurements
of our system, although the curves have the same pat-
tern, our system registered a lower and delayed an-
gle than the Kinovea system. The microcontroller re-
sponsible for data storage and transmission coordina-
tion, optimizes the largest amount of data collected
considering the complexity in handling serial commu-
nication, i2c, SPI, and data processing in the memory
space available. To achieve higher speed data capture,
it is important to improve the data management; ad-
ditionally, the calculation should run in a processor of
higher capacity.
4 CONCLUSIONS
An embedded system was developed that can be used
as orthopaedic tool for recording and analysing kine-
matic data of a person. The static tests demonstrated
that the system can be used for goniometric measure-
ments, to perform outdoor tests, and analysis in cer-
tain sporting techniques. The results presented in this
study could contribute to the development of a low
cost wearable system for the gait analysis using ac-
celerometers. With the respective corrections in the
time of data collection and improving the filtering sys-
icSPORTS 2016 - 4th International Congress on Sport Sciences Research and Technology Support
32

tem could be implemented to complement the sports
studies at high speed disciplines.
REFERENCES
Alonge, F., Cucco, E., D’Ippolito, F., and Pulizzotto, A.
(2014). The use of accelerometers and gyroscopes to
estimate hip and knee angles on gait analysis. Sensors,
14(5):8430–8446.
Balsalobre-Fern´andez, C., Tejero-Gonz´alez, C. M., del
Campo-Vecino, J., and Bavaresco, N. (2014). The
concurrent validity and reliability of a low-cost, high-
speed camera-based method for measuring the flight
time of vertical jumps. The Journal of Strength &
Conditioning Research, 28(2):528–533.
Callaway, A. J. (2015). Measuring kinematic variables in
front crawl swimming using accelerometers: A vali-
dation study. Sensors, 15(5):11363–11386.
Chambers, R., Gabbett, T. J., Cole, M. H., and Beard, A.
(2015). The use of wearable microsensors to quantify
sport-specific movements. Sports Medicine, pages 1–
17.
Chan, M., Est`eve, D., Fourniols, J.-Y., Escriba, C., and
Campo, E. (2012). Smart wearable systems: Current
status and future challenges. Artificial intelligence in
medicine, 56(3):137–156.
Dadashi, F., Crettenand, F., Millet, G., Seifert, L., Komar,
J., and Aminian, K. (2011). Front crawl propulsive
phase detection using inertial sensors. Port. J. Sport
Sci, 11:855–858.
Foerster, F., Smeja, M., and Fahrenberg, J. (1999). Detec-
tion of posture and motion by accelerometry: a vali-
dation study in ambulatory monitoring. Computers in
Human Behavior, 15(5):571–583.
Hobert, M. A., Maetzler, W., Aminian, K., and Chiari, L.
(2014). Technical and clinical view on ambulatory
assessment in parkinson’s disease. Acta Neurologica
Scandinavica, 130(3):139–147.
Lattes, M., Gatti, R., Roa, Y., Fruett, F., and Cunha, S.
(2013). Assessment of micro sensor (sm-mae) in mon-
itoring of cycling. In XXIV Congress of the Interna-
tional Society of Biomechanics.
Lee, J. B., Burkett, B. J., Thiel, D. V., and James, D. A.
(2011). Inertial sensor, 3d and 2d assessment of stroke
phases in freestyle swimming. Procedia Engineering,
13:148–153.
Liu, K., Liu, T., Shibata, K., Inoue, Y., and Zheng, R.
(2009). Novel approach to ambulatory assessment
of human segmental orientation on a wearable sensor
system. Journal of biomechanics, 42(16):2747–2752.
Mangin, M., Valade, A., Costes, A., Bouillod, A., Acco, P.,
and Soto-Romero, G. (2015). An instrumented glove
for swimming performance monitoring. In Proceed-
ings of the 3rd International Congress on Sport Sci-
ences Research and Technology Support, pages 53–
58.
Rueterbories, J., Spaich, E. G., Larsen, B., and Andersen,
O. K. (2010). Methods for gait event detection and
analysis in ambulatory systems. Medical engineering
& physics, 32(6):545–552.
Shi, G., Chan, C. S., Li, W. J., Leung, K.-S., Zou, Y., and
Jin, Y. (2009). Mobile human airbag system for fall
protection using mems sensors and embedded svm
classifier. Sensors Journal, IEEE, 9(5):495–503.
Turcot, K., Aissaoui, R., Boivin, K., Pelletier, M., Hage-
meister, N., De Guise, J., et al. (2008). New accelero-
metric method to discriminate between asymptomatic
subjects and patients with medial knee osteoarthritis
during 3-d gait. Biomedical Engineering, IEEE Trans-
actions on, 55(4):1415–1422.
Wong, W. Y., Wong, M. S., and Lo, K. H. (2007). Clinical
applications of sensors for human posture and move-
ment analysis: a review. Prosthetics and orthotics in-
ternational, 31(1):62–75.
Analysis of a Mobile System to Register the Kinematic Parameters in Ankle, Knee, and Hip based in Inertial Sensors
33
