
A Low-cost Intelligent Car Break-in Alert System
Using Smartphone Accelerometers for Detecting Vehicle Break-ins
Reinhold Behringer, Muthu Ramachandran and Victor Chang
School of Computing, Creative Technologies and Engineering, Faculty of Arts, Environment and Technology,
Leeds Beckett University, Leeds, LS6 3QS, U.K.
Keywords: Alert System, Smartphone, Car Alert, Status Detection, Remote Notification.
Abstract: Smartphones provide sensors and online data connectivity which makes them suitable for individual alert
systems. A prototype for a car break-in alert system has been developed which can detect activity through
smartphone accelerometers. The main goal of this system is to provide a low-cost alternative to expensive
embedded systems with similar functionality. It can be controlled remotely solely through text messages
from another mobile phone, which provides the option to use SMS instead of internet data access, in case of
high cost of internet data connection (international roaming charges). In case of a detected break-in the
system will send a text message to the user’s second phone. The user also can query information and request
the location of the vehicle. The prototype has been tested in various situations, and data have been collected
to distinguish different scenarios. The system has been programmed with MIT App Inventor and will be
made available for free on the Google Play Store.
1 INTRODUCTION
The rapid progress of smartphone technology often
leads to users purchasing a new phone, even if the
old phone is still working fine. A study by Entner
(2011) has shown that in several countries users
change their phone every two years on average. This
raises the question what to do with the old phone,
which may still be very capable for certain tasks,
while the new phone would be the user’s main
phone for regular use.
One possibility is to find use of the old phone for
a particular dedicated application, for example using
the phone in a road vehicle, with the purpose of
adding intelligent functionality to the car. In
particular, if the old smartphone has a reasonable
sensor suite (accelerometers, GPS), it can be used to
detect motion and disturbance in the car, indicating a
possible break-in into the vehicle by a burglar.
Furthermore, the smartphone location system can be
used to track and trace the vehicle when it is being
stolen, and this allows a rapid response to such an
incident. This opens the possiblilty for a very low-
cost system which brings machine intelligence into a
vehicle as a retro-fitted component: there is no
additional hardware cost, and the cost for the
software would be not more than for a typical
smartphone app.
In this paper the prototype of such a system is
described: Intelligent Car Break-In Alert System
(ICaBrAS) consists of an “obsolete” smartphone that
can be left in a vehicle and which can communicate
with the user’s main phone. The software for this in-
vehicle phone has facilities to detect break-ins into
the vehicle and removal of the vehicle from its
parked location. The main communication link to
the user is via text messaging, so no internet
connection is required. If a mobile internet
connection is available, it can be used for additional
services such as using map services for determining
location name.
Since Android is by far the most popular
operating system with a market share of 82% in
2015 Q2 (IDC, 2015), it was chosen for the
development of the ICaBrAS prototype. In order to
include a wide range of Android versions and to
simplify the development process, the MIT App
Inventor prototyping tool (MIT, 2015) was used.
This removed the hurdles of native Android
programming and did allow quick concept testing
without having to solve fundamental software
development problems related to system interface or
device/version compatibility.
The “old” spare smartphone with the ICaBrAs
Behringer, R., Ramachandran, M. and Chang, V.
A Low-cost Intelligent Car Break-in Alert System - Using Smartphone Accelerometers for Detecting Vehicle Break-ins.
DOI: 10.5220/0005914001790184
In Proceedings of the International Conference on Internet of Things and Big Data (IoTBD 2016), pages 179-184
ISBN: 978-989-758-183-0
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
179

sytem installed would need to be placed in the
vehicle at a hidden location, but still with reasonable
mobile and GPS satellite reception. The software for
this alert system monitors the acceleration sensors
and sends an alert message via SMS to the users
“new” phone. The user then can remotely query the
vehicle phone to obtain further information.
This provides a low-cost vehicle alert system
without any fixed installation, wiring or other
integration work at the vehicle itself. The prototype
is self-contained and does not need any mechanical
or electrical interface to the vehicle, except a
connection to a power source, which in most cases
would be the vehicle battery.
The alert system ICaBrAS will be made
available on the Google Play Store for individual
evaluation and testing.
2 RELATED WORK
2.1 Vehicle Alert Systems
There are numerous solutions for devices which set
off a car alerts. High-end vehicles often have
systems built-in which are directly linked with the
vehicle data management systems. One example of
such a system is the OnStar® system which can
report vehicle diagnostics data to a repair centre or a
mobile app (OnStar, 2015). There are subscription
costs associated with this service.
There are also after-market systems available
which can be retro-fitted into vehicles, for example
from Maplin the Nikkai EasyFit Car Alarm (Maplin,
2015). This device sounds an alarm (120 dB) as
soon as an electric consumer is switched on or a
mechanical shock is “felt” by the sensor. This kind
of alert is completely stand-alone and does not
provide any link to the user’s remote phone.
Recently there have been GPS trackers on the
market, with GSM functionality for control through
SMS messages. Most of these devices are embedded
GPS receivers which only rely on location
measurement to determine if the vehicle is being
moved. These devices cost from £50-£120. There
are, however, newer devices made in China for
specifically addressing vehicle alerts, based on GPS
and accelerometers. These devices are also linked to
GSM with a SIM card and provide a functionality
that is similar to ICaBrAS. They are, however not
further configurable and lack the possibilities which
a smartphone offers, for example automated call-
back or customised audio responses. These devices
are, however, very inexpensive at £21 (TomTop
2016).
2.2 Sensing Acceleration
The use of inexpensive smartphone sensors for in-
vehicle application has been explored already since
several years. Johnson and Trivedi (2011) have used
accelerometers to determine the driving style. In
general, such low-cost sensors are suitable for a
wide variety of activity recognition applications, as
shown by Saedi and El-Sheimy (2015).
Smartphone accelerometers have also been used
in differentiating the transport medium in which the
user is travelling (Bedogni, 2012), based on the
characteristics of the acceleration data. Also, the
sensors could detect a vehicle collision (Thompson
et al., 2010).
The novelty in our current time in the year 2016
is that such a system can now be run on a low-cost
“spare” smartphone. In this paper, there is also a
new way of processing the smartphone data and
detecting the specific characteristics by not
examining the raw acceleration data, but by using
the change of acceleration and acceleration
oscillations (noise) to determine the kind of event
that is being detected and classified.
3 SYSTEM ARCHITECTURE
The architecture of the alert system ICaBrAS is
simple: once started, the app continuously captures
data from the accelerometers and processes these
data so that resulting values can be used to classify
the detected motion activity. The data capture works
as fast as the phone can capture and process the
acceleration data. This means it draws significant
battery current; therefore it is advisable to connect
the power to the vehicle 12V supply.
Figure 1: GUI of the application. Left: main operation
screen (dark for stealthyness). Right: configuration screen.
IoTBD 2016 - International Conference on Internet of Things and Big Data
180

3.1 GUI on Smartphone
The OS on this phone needs to be set to disable
screen saver or going into sleep mode, because
otherwise the acceleration data capture would stop.
For a more advanced version other than the current
prototype one would make the system run in the
background as a continuous service and keep
capturing the data and performing the processing.
ICaBrAS can be controlled either through a GUI
on the phone screen (see
Figure 1) or through SMS
messages. The GUI shows status information and
provides access to a configuration menu. Access to
this configuration screen and also exit button are
password-protected, so that no unauthorised user can
configure or terminate the application while it is
running. The background of the GUI is set to black,
to preserve energy and to keep the phone screen dark
while the application is running and the display is
on, so that it cannot easily be seen by a possible
intruder.
In the configuration menu the user can set the
phone number of the corresponding second user
phone from which ICaBrAS can be controlled. This
allows only one single phone to control this app via
SMS. Also the password can be set and changed in
this configuration menu.
3.2 Control through SMS
The user can control the operation of ICaBrAS
solely via SMS from a phone which has been
“registered” with the software in the configuration
screen. The configuration menu allows to either
enter the phone number or select it from the address
book on the phone. Incoming SMS messages from
other phone numbers are ignored.
This method of using SMS for remote cotnrol
has been chosen as a cost-effective method and also
one that is widely compatible with all types of
mobile phones. It works abroad and also in areas
where the signal reception is not sufficient for
mobile data access. Since only SMS messages are
used, no data traffic is created. Such data traffic
abroad could cost a significant amount of money,
therefore the SMS control method is a way of
keeping the operational costs down, as SMS
messages are inexpensive even abroad.
If an SMS with a specific keyword is received,
then ICaBrAS will respond with an SMS reporting
the status and the activity classification of the
system. Once remotely activated, ICaBrAS will keep
sending SMS everytime a new (higher) activity level
is detected. The user can then also stop this SMS
reporting by sending a specific SMS.
The position of the vehicle can be requested
through SMS: the returned SMS contains a link
which will open Google Maps showing a map with
the vehicle location.
The user can remotely request that ICaBrAS
initiates a phone call back to the remote phone. In
conjunction with a Bluetooth hands-free mic/speaker
unit this allows to communicate with whoever is in
the vehicle without them accessing or handling the
phone.
3.3 Development Environment
For the development of this prototype, the cloud-
based framework MIT App Inventor (MIT, 2015)
has been chosen. The reason is the robust and
suitable functionality provided by this framework.
The event-driven nature of the ICaBrAS prototype
could easily be implemented with this framework,
and there was no need to further consider
compatibility issues between various versions of
Android. This means that this prototype should be
able to run on all mobile android phones from
version 2.3 onwards which have a set of 3-axis
accelerometer sensors and GPS for location
reporting.
The development is done simply through drag-
and-drop in a graphical web-based programming
environment. MIT App Inventor is intended to learn
principles of mobile programming, but it extends
very well to more demanding real-world
applications like this.
4 ACTIVITY CLASSIFICATION
The main sensor for the activity detection on which
the alert system is based is the set of accelerometers.
Most smartphones that have been on the market in
recent years have built-in 3-axis accelerometers.
These sensors measure acceleration in the three
orthogonal Cartesian coordinate axes. The
acceleration data are used by applications to
determine motion of the phone, for example to
detect activity for sports and health applications (e.g.
Hong et al., 2010), and to qualitatively determine
key parameters of the motion. Hong et al., (2010)
hereby use FFT to determine the motion
characteristics to link and correlate it to calorie
consumption. This method does not require bias
removal, as only the changes of the acceleration
values are taken into account.
For the purposes of this alert system, it is
A Low-cost Intelligent Car Break-in Alert System - Using Smartphone Accelerometers for Detecting Vehicle Break-ins
181
important to look not only at the temporal changes
but also at the intensity of these changes, because
they will lead to the classification of the detected
activity. This triggers the need for dealing with one
problem that all algorithms relying on accelerometer
data face: the removal of the earth’s gravity bias
from the accelerometer data.
4.1 Gravity Bias Removal
Due to their nature, accelerometer data always do
have a bias when being used in the presence of
gravity: the gravity vector exerts a force which
points directly to the centre of the Earth and which
has the acceleration value of 1g = 9.81 m/s
2
. This
acceleration bias is present during all measurements
of the overall acceleration which is calculated by
the Euclidean Norm from the three Cartesian
components:
(1)
If the sensor is kept at a steady orientation, the bias
removal is easy: the average value can be computed
for each of the three components and is subtracted
from each of the components in order to obtain the
true acceleration. Since in this application the
smartphone and its accelerometer sensors are placed
in the vehicle at a steady location, this simple bias
removal process can be implemented. It is to note,
however, that this bias removal is not valid once the
phone changes its orientation towards the earth,
because then the gravity vector components change
and the average value of the acceleration
components will change. Such a situation can be
mitigated by calculating a weighted or windowed
average which only takes into account the most
recent acceleration measurements.
In the ICaBrAS app the mean acceleration value
of each of the three components is calculated
through a low-pass filter with a time constant of 1
second. Each measurement
leads to a low-pass
filtered value
which represents the average over
1 second. This value is subtracted from the
measurement
to provide the true acceleration
without the gravity bias.
⋅
1
⋅
(2)
This processing is triggered by the event when new
accelerator data arrive. In the specific setup this was
done at 50Hz, therefore the time period for the
measurements was: 0.02. It is explicitly
measured every time the event is raised, therefore
always the true value of the time period is taken into
account in the computation of the true acceleration.
4.2 Acceleration Processing
In order to have a more convenient measure of the
acceleration than the raw value which can range
over several order of magnitudes, the logarithm of
the overall acceleration is calculated and processed
through another low-pass filter with the same time
constant 1 second. This now provides two
suitable values which can be used for describing
motion and acceleration changes: the long-term
filtered average baseline log
value which
describes the changes based on a time constant of 1
second and therefore can be used to detect general
vehicle motion modes, and the immediate
acceleration change value log
which describes
sudden changes in acceleration and can therefore be
used to detect sudden events which only last very
short.
4.3 Activity Classification
The activity detection is based on these two values:
log
and log
. The first value indicates
peaks of activity, while the second value indicates a
longer lasting commotion.
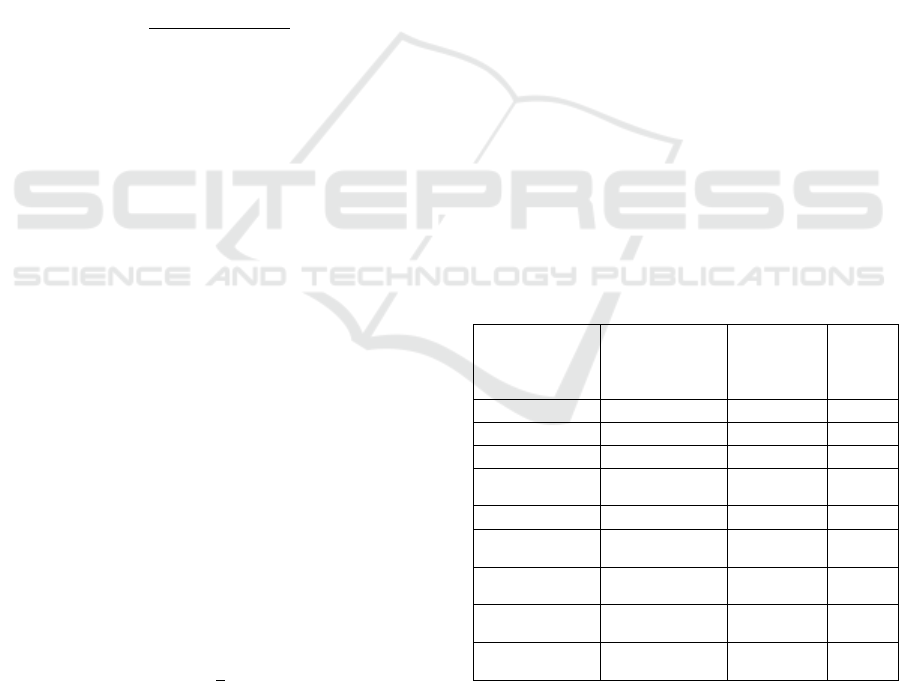
Table 1: Activity classification based on acceleration
values.
maximum:
average:
activity
level
< -3.3 < -3.3 No activity. 0
-3.3 < x < -2.4 < -3.3 Slight jerks. 1
-1.4 < x < -1.0 < -3.3 Some jerks. 2
-1.0 < x < 0.25 < -3.3
Significant
jerks.
3
> 0.25 < -3.3 Hard jerks. 4
any -3.3 < x < -2.4
Some
commotion.
5
any -1.4 < x < -1.0
Motor is
on.
6
any -1.0 < x < 0.25
Vehicle is
driving
7
any > 0.25
Phone in
user’s hand.
8
Through heuristic evaluation the classification
based on the acceleration values in Table 1 have been
determined. These were obtained by observing the
processed acceleration values in different situation.
The mobile phone with its sensors was hereby
IoTBD 2016 - International Conference on Internet of Things and Big Data
182
placed on a flat surface in the vehicle while it
recorded the acceleration data.
For determining the activity the log-acceleration
values were observed during 2-second intervals, and
the peak (Column 1) and the average value (Column
2) of these log-acceleration values were recorded.
They form the base for detecting a change in the
activity level to which the phone is exposed. This
activity is classified into one of 9 levels (0-8, in
Column 4). For classifying a certain level, the
conditions in both Column 1 and Column 2 need to
be satisfied.
5 EXPERIMENTAL SETUP
The prototype of ICaBrAS was installed on a
Google Nexus 4 mobile phone, running Android 5.0.
The remote user phone which did receive SMS
messages and was used to remotely control ICaBrAS
is a Motorola Moto E with Android 5.0.2.
The ICaBrAS phone was placed in the rear of a
2005 Fiat Doblo 1.9 TD. It was continuously
powered from the vehicle battery, and the OS was
set to not go to sleep while connected to external
power. The ICaBrAS software was started and kept
running continuously for several days. The current
that is drawn by the phone from the vehicle battery
is around 300 mA. Since the vehicle battery is a
usual 12V lead-acid with 90 Ah capacity, the
theoretical operation duration can be 300 hours until
the battery would be fully depleated. In typical
realistic situations the usable battery capacity is only
half the nominal value, which is 45Ah. This leads to
a real-world operation of around 150 hours. It is to
note that when the vehicle is driven, the vehicle
battery is being recharged again. To avoid draining
the vehicle battery an auxiliary batterz (leisure
batterz) as it is custom for camper vans can be used
and can be connected to a solar panel. Provided the
solar panel is rated at a sufficiently high power
(150W is a realistic value for this), it then can
generate continuous uninterrupted power to recharge
the battery during the day even in winter.
The accelerometers of the Nexus 4 phone can run
at 50Hz, therefore they provide 50 data sets per
second. For debugging the ICaBrAS could be set
into data recording mode, which provided sets of
CSV files stored on an SDRAM card. This data
recording was controlled remotely through SMS: a
specific messages could switch on the data recording
and turn it off, allowing to record the acceleration
data in specific scenarios.
The phone was placed out of plain sight and was
situated behind a fabric screen. This was done in
order to avoid to attract attention by a possible
intruder. The GPS reception still was good neough
to provide location updates.
6 RESULTS
The Nexus 4 phone with the ICaBrAS software was
run in a variety situations. The following graphical
plots show the resulting log-acceleration data
(maximum) in these sutiations.
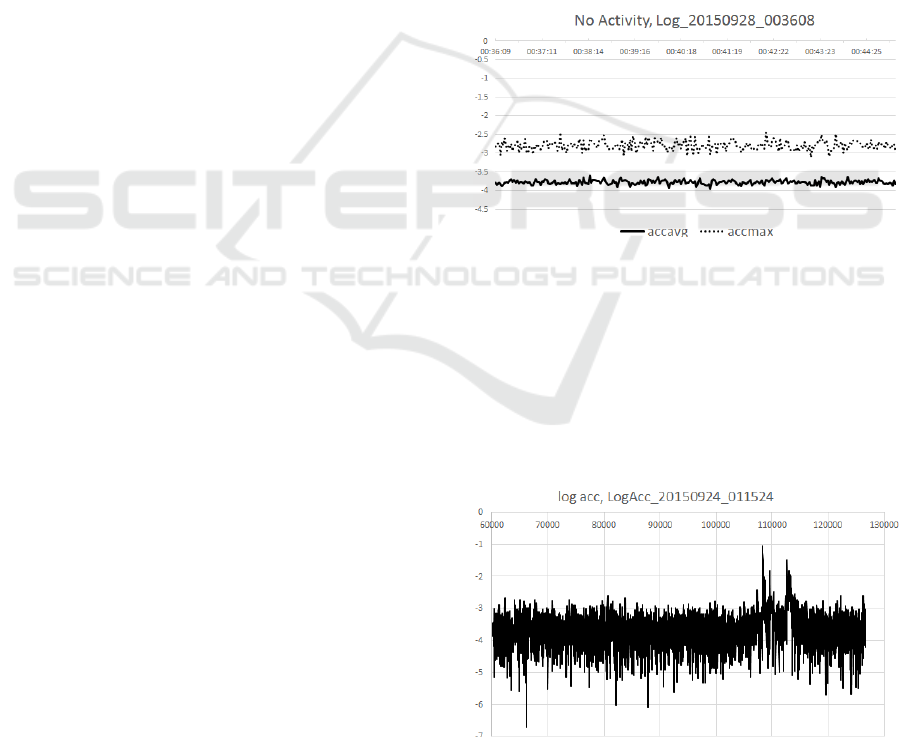
In Figure 2 the log acc data are shown during no
activity. This was recorded during idle time, and the
data plot gives an impression of how the basic noise
of the accelerometer data manifests itself in the case
of absence of any motion or externally triggered
jerk.
Figure 2: Acceleration during 9 minutes of no external
activity. Peak (dotted) and average (solid) values are
shown.
In Figure 3 the data plot shows the log-
acceleration values when the door is opened with a
key. The peak value indicates the moment when the
opening of the door occurs. This peak is detected
and gives rise to a SMS being sent, indicating that an
intruder has entered the vehicle.
Figure 3: Raw log acceleration data with peak when
opening the vehicle door.
A Low-cost Intelligent Car Break-in Alert System - Using Smartphone Accelerometers for Detecting Vehicle Break-ins
183

In Figure 4 the log acceleration is shown during
several phases of driving. The first peak is when opening
the door, then shutting it. At time 176,000 the motor is
started, and then a constant acc noise level between -1 and
-3 is recorded, which is clearly above the acc noise level
for no motion. At time 191,000 the motor is switched off
again, followed by some commotion which includes
opening the door then shutting the door at 213,000. The
time units are milliseconds.
Figure 4: Log acceleration values during different phases
of vehicle operation.
These data plots illustrate how the log acc data
changed during different situation. The
accelerometers in the smartphone are able to pick up
differences in acceleration which can be used for
determining and classifying the activity level which
the phone and hereby the vehicle are undergoing.
The acceleration data which are being collected
and processed while the vehicle is driving can also
be used to identify road roughness. This can be used
to highlight trouble spots with potholes and rough
road surfaces, in particular if many vehicles are
using this app and report back such data via crowd-
sourcing.
7 CONCLUSIONS
The experiments with this prototype app have
indicated that it is possible to re-use an obsolete
smartphone and use it as a low-cost vehicle alert
system. Simple data processing is employed which
can be run in real-time on a typical smartphone
without exceeding its capabilities. This can provide
a low-cost alternative to expensive on-board vehicle
systems. With such a smartphone, any vehicle can
be “upgraded” to become an intelligent device which
can communicate its status and captured data. This
can be used in the context of detecting a break-in,
but also an actual theft of the vehicle, as this can
report its current and changing location back to the
user’s “main” phone.
There is much further potential for using such an
app for data harvesting: the app could collect data
about road roughness and share it with other users
through a web app / web portal. Also, in conjunction
with the location tracking, the app could be used to
estimate the mechanical stress under which the
vehicle is, from its accelerations and vibrations
which are recorded on the phone.
REFERENCES
Bedogni, L., Di Felice, M., Bononi, L. 2012. By train or
by car? Detecting the user’s motion type through
smartphone sensors data. Wireless Days, 2012 IFIP,
21-23 Nov 2012, Dublin.
Entner, R, 2011. International Comparisons: The Handset
Replacement Cycle. Recon Analysis. 23 June 2011.
http://mobilefuture.org/wp-content/uploads/2013/02/
mobile-future.publications.handset-replacement-cycle.
pdf.
Hong, Y.-J. and Kim, I.-J., 2010. Mobile health
monitoring system based on activity recognition using
accelerometer. In Simulation Modelling Practise and
Theory, v.8, no.4, 4 April 2010, pp. 446-455.
IDC, 2015. Smartphone OS Market Share, 2015 Q2.
http://www.idc.com/prodserv/smartphone-os-market-
share.jsp
Johnson, D.A. and Trivedi, M.M. 2011. Driving style
recognition using a smartphone as a sensor platform.
Proc of ITSC 2011, 14
th
Int. IEEE Conference on
Intelligent Transportation Systems (ITSC).
Washington DC, 5-7 Oct 2011, pp. 1609-1615.
Maplin, 2015. http://www.maplin.co.uk/p/nikkai-easy-fit-
car-alarm-120db-siren-a78jq
MIT, 2015. MIT App Inventor. http://
appinventor.mit.edu/explore/
OnStar, 2015. https://www.onstar.com
Saedi, S. and El-Sheimy, N. 2015. Activity Recognition
Using Fusion of Low-Cost Sensors on a Smartphone
for Mobile Navigation Application. Micromachines,
vol 6, no.8, pp. 1100-1134.
Thompson, C.. White, J., Dougherty, B., Albright, A., and
Schmidt, D.C. 2010. Using Smartphones to Detect Car
Accidents and Provide Situational Awareness to
Emergency Responders. In Mobile Wireless
Middleware, Operating Systems and Applications. 3
rd
Ing. Conf. Mobileware 2010, Chicago. Pp. 29-42.
TomTop, 2016. Vehicle Tracker Anti Theft Alert System,
http://www.tomtop.com/various-function-gsm-gps-
car-vehicle-tracker-anti-theft-alert-system-sos-voice-
talking-communicating-iosandriod-app-positioning-
alarm-tracker-k2463.html.
IoTBD 2016 - International Conference on Internet of Things and Big Data
184
