
Recognition of Urban Transport Infrastructure Objects Via
Hyperspectral Images
Oleg Saprykin
1
, Alexander Fedoseev
1
and Tatyana Mikheeva
1,2
1
Samara State Aerospace University, 34, Moskovskoye Shosse, Samara, Russia
2
Scientific and Production Centre «Intelligent Transportation Systems», Samara, Russia
Keywords: Convolutional Neural Networks, Deep Machine Learning, Hyperspectral Images, Transport Infrastructure,
Image Recognition.
Abstract: Actualization of vector maps of the urban transport infrastructure, including street and road network, in
conditions of constant changes is a resource-consuming task and it requires the automation of the process.
The article considers the solving of problem of transport infrastructure objects recognition in hyperspectral
images by deep convolutional neural networks. The hyperspectral images from different sources are
considered for solving the problem. We propose a new approach to the formation of receptive fields of
convolutional neural networks: the receptive field covers several pixels, but the depth of the colour channels
is limited. In the proposed approach the receptive field moves in three dimensions - in two spatial
dimensions and in spectral channels dimension. It gives the ability to recognize the transport infrastructure
objects by spatial patterns and spectrum.
1 INTRODUCTION
The modern pace of large cities development entails
a permanent changing of transport infrastructure.
This is especially noticeable at the stage of preparing
the city for receiving a major sporting or cultural
event. In general, the changes in the transport
infrastructure are determined by several factors:
• steady increase in the level of motorization in
the cities;
• construction of new residential buildings;
• reconstruction and building of engineering
facilities;
• construction of new sociocultural and sports
facilities;
• expanding the boundaries of the city;
• growing demand of citizens to transport
accessibility.
Changes in transport infrastructure in most cases
are systematized, but at the moment there are no
clear mechanisms for notification of all involved
organizations and services. Particular difficulties are
experienced by non-governmental organizations
distributing cartographical information or offering
services based on it. Actualization of vector maps of
the city street and road network in conditions of
constant changes becomes a task, which requires
involvement of a large number of resources.
The solution of the problem of timely updating
the map data is possible by the automation of the
process. One of the methods is recognition of
satellite images of areas. At the same time, the use
of ordinary photos is associated with the problem of
incomplete data and as a consequence of the poor
quality of recognition. When operating with a city
map it is advisable to use hyperspectral images
because they contain a larger amount of information
at each point in the image, which greatly improves
the quality of transport infrastructure recognition.
Hyperspectral measurements for physical-
chemical properties assessment help to evaluate
road-transport infrastructure objects conditions. This
research trend is concerned in papers (Resende et al.,
2014; Mei et al., 2014; Cavalli et al., 2008; Wei et
al., 2009; Herold et al., 2004a; Gomez, 2002;
Miraliakbari and Hahn, 2014).
Hyperspectral images are third dimensional data
array which consists of spatial information about
object and spectral information for each spatial
coordinate. Each pixel of hyperspectral image is
attributable to its spectral feature. Information is
represented in tens and hundreds of neighboring
bands (about 5-10 nm). Frequently hyperspectral
Saprykin, O., Fedoseev, A. and Mikheeva, T.
Recognition of Urban Transport Infrastructure Objects Via Hyperspectral Images.
In Proceedings of the International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2016), pages 203-208
ISBN: 978-989-758-185-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
203
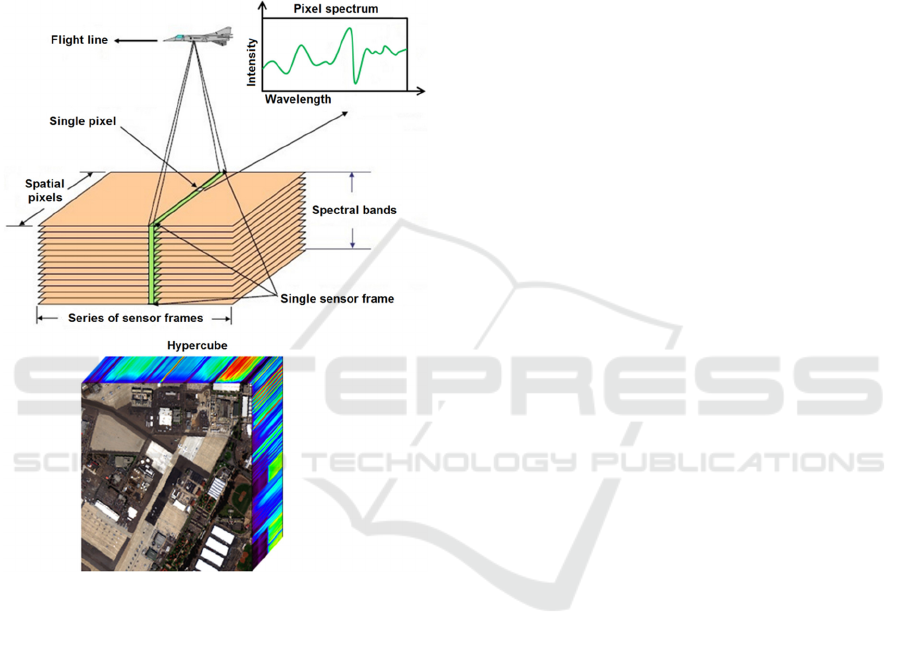
information is represented like “hypercube”
(Figure 1).
For effective solving of problems mentioned
above hyperspectral data must have high spatial
resolution and must span spectral region from 0.4 to
2.5 μm. The important aspect is development of road
pavement spectral library for different classes and
different conditions and typical materials for urban
territory on the basis of field data acquired by hand
spectroradiometer.
Figure 1: Schema of “hypercube” formation.
The process of transport infrastructure objects
monitoring is associated with a range of features
which is defined by a necessity of preliminary
processing as well.
Firstly, given that in the three-dimensional land
surface structure, road-transport infrastructure
objects are the “bottom layer” that can be covered or
shadowed by surrounding surfaces such as trees,
buildings or vehicles.
Secondly, the problem of hyperspectral data
processing would be solved essentially more easily
if all image pixels were “pure”, i.e. each pixel
contains information only about the single object.
However, natural surfaces rarely consist of
homogeneous material. Furthermore, the total
radiation from all of the objects inside the spatial
resolution element is registered by the sensor as
single image pixel. Therefore in general the
operator-user deals with the so called “mixed pixel”.
The mixture dynamics of two or more materials
inside the single pixel can be described by linear and
non-linear models (Keshava, 2003; Kukharenko,
2013).
Thirdly, remote sensing hyperspectral data
contains information not only about the surface but
also about the atmosphere conditions. The
atmospheric correction procedure intends for
rejection of this warping factor and image
transformation from spectral brightness units to
spectral reflectance index units (Mikheeva and
Fedoseev, 2014; Zhuravel and Fedoseev, 2013;
Yuanliu et al, 2007; Schowengerdt, 2010, Schott,
2007).
Finally, the spectral profiles of transport
infrastructure objects frequently are similar to
spectral profiles of typical urban infrastructure
artificial objects (roofs of buildings, engineering
structures). This fact can influence negatively to
results of hyperspectral data processing (Herold et
al., 2004a).
To get the satisfactory results during the usage of
high resolution hyperspectral images for monitoring
and evaluation of road-transport infrastructure
objects conditions, several processing stages must be
applied (in the case of correct initial data are
prepared) (Cavalli et al, 2008; Chang, 2000;
Gualtieri and Cromp, 1999; Ratle et al., 2010).
Generally the process of thematic processing can
be divided into two main stages (Resende et al.,
2014):
• objects of interest detection and extraction;
• classification of road-transport infrastructure
objects.
To extract the road pavement the algorithms of
controlled classification are used. These algorithms
require spectral samples availability (Herold et al.,
2004b).
In this case spectral samples are contained in
spectral library, which is filled up by the
measurements from field and aviation
hyperspectrometer. The algorithms of controlled
classification offer two approaches: determinate and
statistical.
The determinate approach is used in the case
when objects classes don’t overlap in the feature
space (Schowengerdt, 2010). However, natural and
artificial objects are generally nonhomogeneous and
spectral characteristics of research objects are
similar or particularly overlapped (for example, for
different types of soils and road pavements).
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
204
Therefore the classification methods which are
based on statistical approach for feature variations
considering and accept to attribute of pixels to
another’s classes if the frequency of their appearance
is low have been popular (Chandra, 2008).
Despite of extensive researches in the application
of hyperspectral images, their usage in solving the
problem of recognition of transport infrastructure
objects is associated with a number of difficulties
described above. One of the methods leveling these
difficulties is the application of artificial intelligence
techniques to solve the problem (Saprykin and
Saprykina, 2015). In recent years the convolutional
neural networks have proved themselves in the field
of image processing. The researches are actively
conducted in the field of recognition of images,
consisting of the three color channels (Krizhevsky et
al., 2012; Simonyan and Zisserman, 2014).
However, the processing of hyperspectral imaging is
studied insufficiently, and more research is
necessary to find the optimal network architecture
and training algorithms. This article considers the
problem of recognition of transport infrastructure
objects in hyperspectral images by deep
convolutional neural networks.
2 CONVOLUTIONAL NEURAL
NETWORKS
Recent researches have shown great success of
convolutional neural networks in images
recognition. The architecture and training algorithms
of such neural networks are similar to ordinary
feedforward networks, but they are optimized for
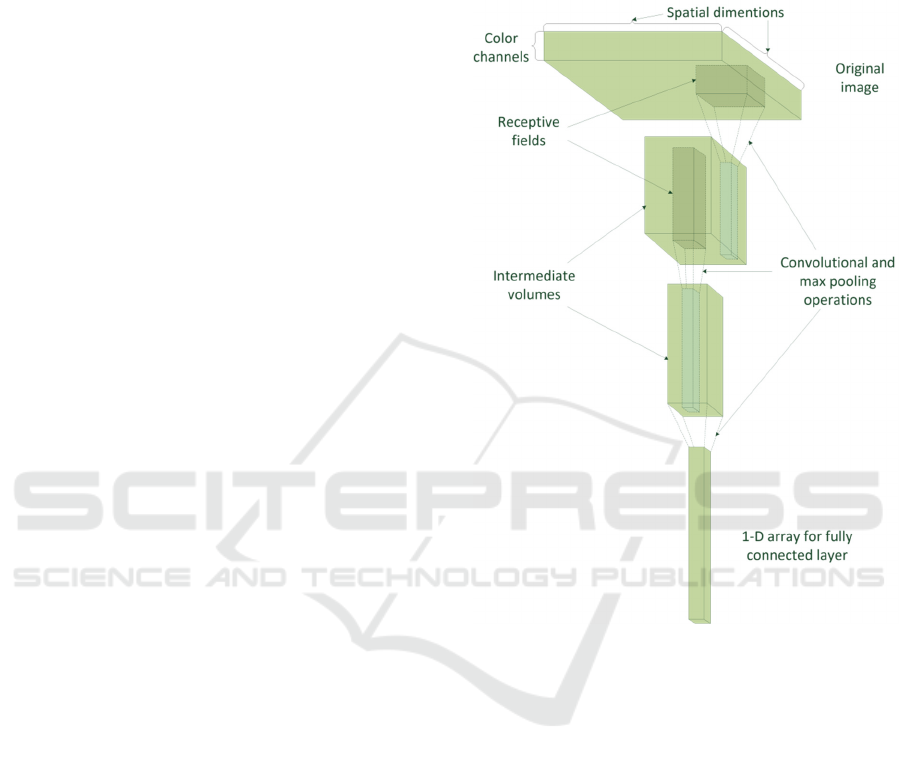
handling large amounts of input data. The input
layer of convolutional neural networks is
represented as 3-D data set. When passing through
the layers of the neural network the size of the input
array is changed, and eventually it is reduced to one-
dimensional array, which is easily treated by a
conventional feedforward neural network (Figure 2).
Such transformation with retention of high learning
ability requires a large number of layers, so it is
reasonable to use deep convolutional neural network
(Simonyan and Zisserman, 2014).
The convolutional neural network consists of the
following types of intermediate layers: convolutional
layers, max pooling layers and fully connected
layers. Convolutional layers serve to identify the
characteristics of facilities in accordance with pre-
trained patterns. Max pooling layers allow to select
the strongest signal from the considered region and
reduce the size of data array. At the final stage of
data processing the fully connected layer is used,
which directly determines what class the facility
described by the input data set is (Krizhevsky et al.,
2012).
Figure 2: Schema of reducing of the input data set in
convolutional neural network.
Convolutional neural network is not fully
connected. Each subsequent intermediate network
layer is associated with a small number of neurons in
the previous layer that unites their presence in a
small local area - receptive field. The important
point, accelerating the training and working of the
neural network, is using the same weights for all
receptive fields of the layer (parameters sharing).
When designing the convolutional layer such
parameters as the depth of the output array, stride,
and zero-padding can be varied. By varying the
depth of the output array the number of features
which are recognizable by the layer can be
controlled. Zero-padding is used in the case of the
necessity to preserve the original image size.
Due to the small size of the receptive fields the
convolutional layer may incorrectly detect a feature,
which does not belong to an object. To prevent such
Recognition of Urban Transport Infrastructure Objects Via Hyperspectral Images
205
mistakes it is necessary to zoom-out the considered
area, for this purpose the max pooling layer is used.
Neurons in this layer do not use parameters, and
therefore the training is not required. Their work
comes down to choosing the strongest signal from
the treated area. After passing the array through the
max pooling layer the most characterized object
features are remained.
3 CONVOLUTIONAL NEURAL
NETWORK FOR
HYPERSPECTRAL IMAGES
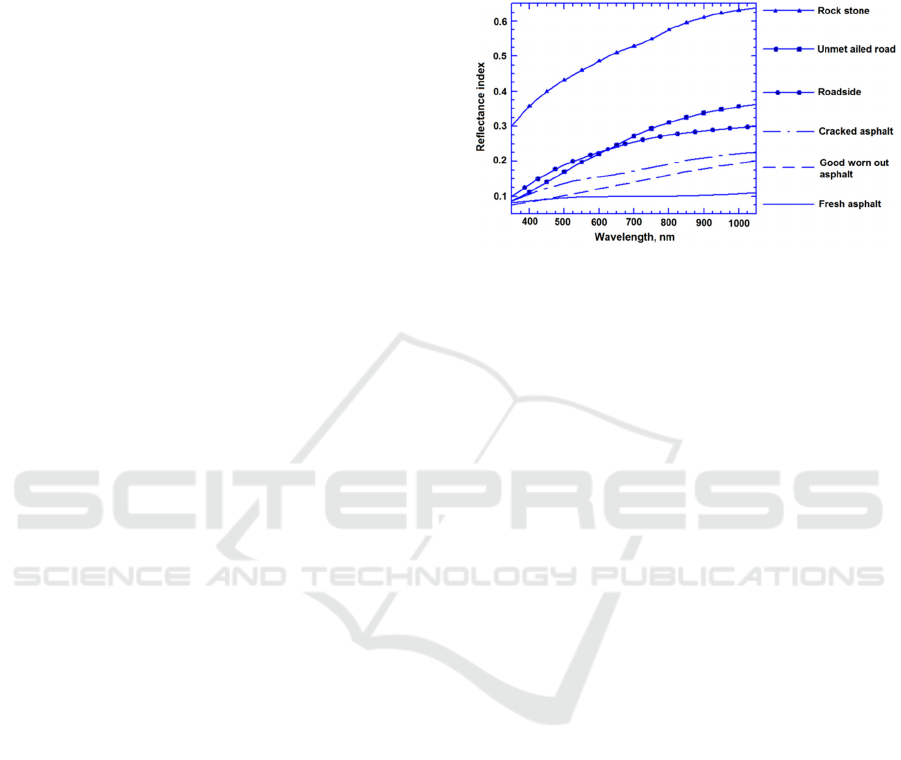
The initial data for the experiments are hyperspectral
images of Samara region which were acquired in
2013-2014 in 36, 48 and 72 spectral bands in the
range 0.35–1.05 μm. Field quasi-synchronous
measurements via FieldSpec-4 spectroradiometer of
Samara transport infrastructure typical objects have
been used as patterns (Figure 3). Moreover, to
research of hyperspectral data thematic processing
methods we use information acquired by AVIRIS
and HYDICE sensors parallelly in 224 and 191
spectral bands. The spectral range for AVIRIS data
is 0.36–2.5 μm and for HYDICE data is 0.4–2.47
μm. The preliminary processing of initial data is
used for vacant channels filtering and atmospheric
correction. The module FLAASH, which is the part
of program system ENVI, was used for atmospheric
correction. We also used another method of
atmospheric correction called empirical line method.
This method has displayed more accurate results but
it can be used only in the case of spectral patterns
availability in the processing image. It is desirable to
have artificial materials in the image as patterns, or
patterns could be artificial materials under condition
of once only acquisition with the aerospace data. In
the stage of preliminary processing operations of
information dimension reduction has been used. The
most popular methods of dimension reduction are
Principle component analysis (PCA) (Gorban et al.,
2008; Rodarmel and Shan, 2002) and Independent
component analysis (Robila, 2005). PCA has been
used in this research.
Convolutional neural networks are widely used
in the classification of images as they provide good
recognition quality with relatively small effort.
However, when working with hyperspectral images,
this advantage can be substantially reduced because
of the large dimension of the data, since each point
of the image is represented by a vector of hundred or
more values. There is an approach that uses a single
point of image as the receptive field with a full range
of values of spectral vector (Hu et al, 2015). The
disadvantage is the insensitivity of the method to the
spatial patterns, and as a consequence, the inability
to recognize objects by the features.
Figure 3: Spectral characteristics of typical transport
infrastructure objects in Samara region.
We propose a new approach to the formation of
receptive fields, which allows to keep the
advantages of the convolutional networks and use
the information from all color channels of
hyperspectral image. In the proposed approach the
receptive field covers several pixels, but the depth of
the color channels, that can be used simultaneously,
is limited. During operating of the neural network
the receptive field moves not only in the horizontal
plane, as in the current implementations, but also in
the depth of color channels, thus covering the whole
available spectrum. The value of the stride for the
color channels must be less than the depth of
receptive field. This allows to overlap the color
channels, to increase the number of processed
images in different spectra, and thus improve the
quality of recognition.
The described approach of receptive field
formation requires changes in the standard structure
and training algorithm of the convolutional neural
network, since each depth of color channels requires
its own set of weighting coefficients (or filters in
terms of convolutional neural networks). The
requirement is dictated by the fact that the same
spatial filters may be responsible for completely
different features in different spectral channels. To
meet this requirement an extra dimension is
introduced to the array of trained filters. Moving in
this dimension is performed synchronously with the
movement of receptive field to a new depth of
spectral channels. With such work organization the
weights sharing is carried out only in the horizontal
movement of receptive field. During movement
deeper into the spectral channels the weights sharing
is not used. Thus the structure of neural network
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
206

differentiates the data streams for different spectral
channels.
To implement the described neural network the
TensorFlow framework is chosen, because it has a
clear API and the flexibility to transform
multidimensional data sets (Abadi et al., 2015).
TensorFlow has already had an implementation of
convolutional neural network. This neural network
architecture is highly configurable, that allows to
implement the described differentiation of data
streams by spectral channels. The framework also
allows to use the graphics processor unit (GPU),
which significantly reduces the training time of the
neural network on hyperspectral images of the city's
transport infrastructure.
4 CONCLUSIONS AND FUTURE
RESEARCH
In this article, we have reviewed the main problems
arising during recognition of hyperspectral images
of cities and detection of transport infrastructure
objects on them. The new method of the
classification of hyperspectral images is proposed. It
is based on deep convolutional neural network that
differs from the existing ones by movement of the
receptive field in three dimensions - in two spatial
dimensions and in spectral channels dimension. This
approach makes it easier to recognize the transport
infrastructure objects in dense urban areas.
Further research is related to carrying out a large
number of experiments with hyperspectral images of
cities. It is necessary to compare the results of object
recognition in images taken from different satellites
operating in different spectral ranges and with
different number of spectral channels. It is necessary
to investigate the usage of artificial neural networks
at the stage of clearing and pre-processing of raw
hyperspectral images.
Subsequently, it is necessary to carry out a
comparative description of object recognition quality
of the developed method and the existing methods
(for example, Support Vector Machine, Spectral
Angle Mapper, Maximum Likelihood Method,
Mahalanobis Distance Method, etc.). Comparison of
methods should be carried out by several
parameters, the most important of which are the
accuracy (probability of correct determination of the
class), and receiver operating characteristic curve
(ratio of the probability of true positive outcome and
the probability of false positive outcome). In
addition to the qualitative characteristics, the
performance, scalability and the ability to process
information in concurrent threads should also be
compared.
Further work also needs improving the
convolutional neural network classifying the
transport infrastructure facilities. It is intended the
usage of the latest developments in this area: spatial
factorization, label smoothing and asynchronous
stochastic gradient descent. It is necessary to
increase productivity and quality of recognition to
allow wide application of the method in transport
geographic systems.
Modern intelligent transport systems involve the
usage of unmanned aerial vehicles. To date, the
payload of such vehicles is presented by a wide
range of sensors, including hyperspectral cameras.
The data received from the sensors require a
semantic interpretation. The proposed in this paper
approach to processing of hyperspectral data,
focused on effective recognition of the transport
infrastructure, may be used as a part of spatial data
processing complex in the structure of the modern
intelligent transport system.
ACKNOWLEDGEMENTS
This work was supported by the Ministry of
Education and Science of the Russian Federation.
REFERENCES
Abadi, M., A. Agarwal, P. Barham, E. Brevdo, Z. Chen,
C. Citro, G. S. Corrado, A. Davis, J. Dean, M. Devin,
S. Ghemawat, I. Goodfellow, A. Harp, G. Irving, M.
Isard, Y. Jia, R. Jozefowicz, L. Kaiser, M. Kudlur, J.
Levenberg, D. Mane,´ R. Monga, S. Moore, D.
Murray, C. Olah, M. Schuster, J. Shlens, B. Steiner, I.
Sutskever, K. Talwar, P. Tucker, V. Vanhoucke, V.
Vasudevan, F. Viegas, O. Vinyals, P. War- ´ den, M.
Wattenberg, M. Wicke, Y. Yu, and X. Zheng (2015).
TensorFlow: Large-scale machine learning on
heterogeneous systems. Software available from
tensorflow.org.
Cavalli, R., Fusilli, L., Pascucci, S., Piguatti, S. and
Santini, F. (2008). Hyperspectral Sensor Data
Capability for Retrieving Complex Urban Land Cover
in Comparison with Multispectral Data: Venice City
Case Study (Italy), Sensors, 8(5), pp. 3299-3320.
Chandra, A.M. (2008). Remote Sensing and Geografical
Information Systems, Technosphera, Moscow.
Chang, C.I. (2000). An information-Theoretic Approach to
Spectral Variability, Similarity, and Discrimination for
Hyperspectral Image Analysis. Information Theory,
Recognition of Urban Transport Infrastructure Objects Via Hyperspectral Images
207

IEEE Transactions on Information Theory, 46(5), pp.
1927-1932.
Gomez, R.B. (2002). Hyperspectral imaging: a useful
technology for transportation analysis. Optical
Engineering, 41(9), pp. 2137-2143.
Gorban, A., Kegl, B, Wunsch, D. and Zinovyev A. (2008).
Principal Manifolds for Data Visualisation and
Dimension Reduction, Lecture notes in computational
science and engineering, Springer, Berlin –
Heidelberg – New York.
Gualtieri, J.A. and Cromp, R.F. (1999). Support vector
machines for hyperspectral remote sensing
classification, available at: http://ntrs.nasa.gov/archive
/nasa/casi.ntrs.nasa.gov/19990021532.pdf (accessed 5
January 2016).
Herold, M., Roberts, D., Smadi, O and Noronha, V.
(2004a). Road condition mapping with hyperspectral
remote sensing. Available at: http://www.geogr.uni-
jena.de/~c5hema/urbanspec/av04_roadmapping_herol
detal.pdf (accessed 5 January 2016).
Herold, M., Gardner, M, Noronha, V. and Roberts, V.
(2004b). Spectrometry and hyperspectral remote
sensing of urban road infrastructure. Available at:
http://www.eo.uni-jena.de/~c5hema/pub/rse04_herold
etal.pdf (accessed 5 January 2016).
Hu, W., Huang, Y., Wei, L., Zhang, F., and Li, H. (2015).
Deep Convolutional Neural Networks for
Hyperspectral Image Classification. Journal of
Sensors, vol. 2015, Article ID 258619, 12 pages.
Keshava, N. (2003). Survey of Spectral Unmixing
Algorithms. Lincoln Laboratory Journal, 14(1), pp.
55-78.
Krizhevsky, A., Sutskever, I. and Geoffrey E.H. (2012).
ImageNet Classification with Deep Convolutional
Neural Networks. Advances in Neural Information
Processing Systems 25. Curran Associates, Inc. Pp.
1097-1105. Available at: http://papers.nips.cc/paper/48
24-imagenet-classification-with-deep-convolutional-ne
ural-networks.pdf.
Kukharenko, B.G. (2013). Algorithms of analysis of
hyperspectral images components, Supplement of
Journal “Information technologies”, No. 6, - 32 p.
Mei, A., Salvatori, R., Fiore, N., Allegrini, A. and
D’Andrea (2014). A Integration of field and laboratory
spectral data with multi-resolution remote sensed
imagery for asphalt surface differentiation. Remote
sensing, Vol. 6, pp. 2765–2781.
Mikheeva, T.I. and Fedoseev, А.А. (2014). Clusterization
of Hyperspectral Data of Transport Infrastructure
Objects Monitoring. Reporter of Samara Scientific
Center of Russian Academy of Sciences, Vol. 16 No. 4
(2), pp. 435-442.
Miraliakbari, A. and Hahn, M (2014). Development of
multi-sensor system for road condition mapping. The
International archives of the photogrammetry, remote
sensing and spatial information, Vol. XL-1, pp. 265–
272.
Resende, M., Bernucci, L. and Quintanilha, J. (2014).
Monitoring the condition of roads pavement surfaces:
proposal of methodology using hyperspectral images,
Journal of Transport Literature, 8(2), pp. 201–220.
Ratle, F., Camps-Valls, G. and Weston, J. (2010).
Semisupervised neural networks for efficient
hyperspectral image classification, IEEE Transactions
on Geoscience and Remote Sensing, 48(5), pp. 2271–
2282.
Robila, S. (2005). Investigation of Spectral Screening
Techniques for Independent Component Analysis
Based Hyperspectral Image Processing. Available at:
http ://www.cs.uno.edu/~stefan/ (accessed 5 January
2016).
Rodarmel, C. and Shan, J. (2002). Principal component
analysis for hyperspectral image classification.
Surveying and Land Information Science, 62(2), pp.
115-122.
Saprykin, O. and Saprykina, O. (2015). Multilevel
Modelling of Urban Transport Infrastructure. In
Proceedings of the 1st International Conference on
Vehicle Technology and Intelligent Transport Systems
(VEHITS-2015), Portugal, Lisbon: SCITEPRESS, pp.
78-82.
Schott, J. (2007). Remote sensing: the image chain
approach, 2nd ed., Oxford University Press, USA.
Schowengerdt, R.A. (2010). Remote Sensing: Methods
and Models for Image Processing. Technosphera,
Moscow.
Simonyan, K. and Zisserman, A. (2014). Very Deep
Convolutional Networks for Large-Scale Image
Recognition. CoRR. abs/1409.1556.
Yuanliu, X., Runsheng, W. and Shengwen, L. (2007).
Atmospheric correction of hyperspectral data using
MODTRAN model. Proceedings of 16th National
Symposium on Remote Sensing of China, 7 pages.
Zhuravel, J.N. and Fedoseev, A.A. (2013). Specificity of
Hyperspectral Remote Sensing Data Processing for the
Tasks of Environment Monitoring, Computer Optics,
Vol. 37 No. 4. - pp. 471-476.
Wei, J., Zhou, G., Zheng, Z. (2009). Survey and analysis
of land satellite remote sensing applied in highway
transportations infrastructure engineering. Available
at: http://www.asprs.org/a/publications/proceedings/ba
ltimore09/0102.pdf (accessed 5 January 2016).
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
208
