
Toward a Real Time View-invariant 3D Action Recognition
Mounir Hammouche
1
, Enjie Ghorbel
1
, Anthony Fleury
1
and S
´
ebastien Ambellouis
1,2
1
Mines Douai, URIA, F-59508, Douai Cedex, France
2
Ifsttar, Cosys - Leost, F-59666, Villeneuve d’Ascq Cedex, France
Keywords:
Action Recognition, Human Interaction.
Abstract:
In this paper we propose a novel human action recognition method, robust to viewpoint variation, which com-
bines skeleton- and depth-based action recognition approaches. For this matter, we first build several base
classifiers, to independently predict the action performed by a subject. Then, two efficient combination strate-
gies, that take into account skeleton accuracy and human body orientation, are proposed. The first is based on
fuzzy switcher where the second uses a combination between fuzzy switcher and aggregation. Moreover, we
introduce a new algorithm for the estimation of human body orientation. To perform the test we have created a
new Multiview 3D Action public dataset with three viewpoint angles (30°,0°,-30°). The experimental results
show that an efficient combination strategy of base classifiers improves the accuracy and the computational
efficiency for human action recognition.
1 INTRODUCTION
Action recognition has been an active field of research
in the last decades (Laptev and Lindeberg, 2003; Rah-
mani et al., 2014). It has a strong connection to many
fields such as smart surveillance, intelligent human-
robot interaction, and sociology (Peng et al., 2014).
The activities that have been studied include people
interactions, single or group of person(s) activities.
Moreover, human action recognition methods can be
divided into three categories that are RGB-, skeleton-
and depth-based methods (Wang et al., 2012b).
In RGB-based methods, research has focused on
learning directly from the colors of the image se-
quences. However, there are inner limitations of this
kind of information, e.g. it is sensitive to illumination
changes and background clutters. The accurate RGB-
based actions recognition still remains a challenging
task (Vemulapalli et al., 2014).
With the recent advances of depth cameras these
last years, such as Kinect, depth-based approaches
have received a greater attention. Depth-based meth-
ods have several advantages compared with RGB-
based ones. First, the depth cameras offers 3D map
information of the scene, which provides more dis-
cerning information to recognize actions. Secondly,
depth cameras can work in dark conditions (Xia and
Aggarwal, 2013). The advantages of depth cameras
also lead to a renewal interest in skeleton-based ac-
tion recognition, notably after the integration of the
robust skeleton estimation algorithm of Shotton et
al.(Shotton et al., 2011) in several software. This
algorithm makes the estimation of joints from depth
video sequence relatively easy, fast and accurate.
Depth-based action recognition approaches pro-
vide better results than skeleton-based approaches in
the presence of self-occlusion. However, these meth-
ods suffer from the lack of precision and are sensi-
tive to viewpoint variation. There are some view-
invariant methods based on the extraction of features
from pointclouds instead of depth images (Rahmani
et al., 2014), but these methods are time consuming
and not adapted for real-time applications.
The skeleton estimated from depth images is
widely accurate in laboratory settings. However in
real conditions, the situations are more complex: Self-
occlusion between body segments usually appears
and people are not often in front of the camera (Xia
and Aggarwal, 2013). These conditions cause diffi-
culties for recognition task (Oreifej and Liu, 2013).
The aim of this paper is to develop a novel
human action recognition technique, which com-
bines skeleton- and depth-based action recognition
approaches. Foremost, to deal with view-invariant is-
sue of depth-based action recognition, we propose a
novel method, robust to viewpoint variation and ap-
plicable in real-time. These methods are based on hu-
man body orientation and aggregation of several base
Hammouche, M., Ghorbel, E., Fleury, A. and Ambellouis, S.
Toward a Real Time View-invariant 3D Action Recognition.
DOI: 10.5220/0005843607450754
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 4: VISAPP, pages 745-754
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
745

classifiers. Furthermore, to combine the skeleton- and
depth-based classifiers, we study two strategies, the
first being based on fuzzy switcher, and the second on
combination between fuzzy switcher and aggregation.
This paper is organized as follows: Section 2,
briefly reviews the most relevant skeleton and depth
based human action recognition approaches; section 3
introduces a novel Multiview public dataset and pro-
vides duration and accuracy evaluations for various
state-of-the-art algorithms on our dataset; section 4
gives a description of our proposed method; Section 5
discusses the computational efficiency and the robust-
ness of combination methods to viewpoint variations.
Finally, conclusion is given in Section 6.
2 RELATED WORKS
The recent advances of RGB-D cameras have pro-
vided a new opportunity for skeleton estimation.
However, the extraction of human skeleton has be-
come relatively easier and more accurate (Shotton
et al., 2011), leading to a great attention for skeleton-
based action recognition approaches. These last
years, many researchers focused on developing novel
skeleton feature space to characterize human ges-
tures. In (Yang and Tian, 2012), Yang et al. used
the relative-joint positions representation as features
to characterize the different actions, classification is
done using the Naive-Bayes nearest neighbor. Wang
et al. (Wang et al., 2012b) used the same relative-
joint position features but they focused on the tempo-
ral modeling of different actions using Fourier Tem-
poral Pyramid. Furthermore, to make the skeletal data
invariant to the location and orientation of the subject
in the scene, person-centric coordinate and normaliza-
tion of the skeleton were adopted by many researches
(Vemulapalli et al., 2014; Xia et al., 2012). These pro-
cesses improve the robustness of skeleton-based ac-
tion recognition to make them view invariant. Xia et
al. (Xia et al., 2012), introduced a view-independent
representation of the skeleton obtained by the orienta-
tions quantization of the body joints into histograms
with respect to the hip center reference. The tempo-
ral evolution of this method is modeled using Hidden
Markov Model (HMM). Vemulapalli et al. (Vemula-
palli et al., 2014), present a new skeletal representa-
tion that lies in the Lie group of Special Euclidean
group SE(3), describing the rotations and translations
between various body segments using 3D euclidean
geometric transformations. In order to simplify the
approach of classification the authors project the ex-
tracted features using lie algebra. Then, they per-
form classification using a combination of dynamic
time warping, Fourier temporal pyramid representa-
tion and linear Support Vector Machine (SVM).
Recently, depth-based action recognition has
made great progress. Wang et al. (Wang et al., 2012a),
utilize a sparse coding approach to encode the Ran-
dom Occupancy Pattern (ROP) features to recognize
the different actions. The ROP features is shown to
be robust to occlusion. The approach proposed in
(Yang et al., 2012) projects depth maps of action in-
stances into three orthogonal planes. To represent
the action, the authors use the Histogram of Oriented
Gradients (HOG) descriptor to characterize the Depth
Motion Maps (DMM), which is the accumulation of
motion energy through the entire sequences of each
projection. Due to its computational simplicity, the
same approach in (Yang et al., 2012) is adopted in
the work of (Chen et al., 2013), while the latter mod-
ifies the procedure to obtain DMMs without includ-
ing HOG descriptor. As a result, the computational
complexity of the feature extraction process is greatly
reduced. Similarly to (Yang et al., 2012), Oreifej et
al. (Oreifej and Liu, 2013) describe the depth se-
quence using a histogram that captures the distribu-
tion of the normal to the surface orientation in the 4D
space (HON4D), composed of time, depth, and spatial
coordinates. Ohn-Bar et al. (Ohn-Bar and Trivedi,
2013), propose a new descriptor for spatio-temporal
feature extraction from depth images called HOG
2
in
which they evaluated the extracted features in a bag-
of-words scheme using linear SVM.
Rather than the recent skeleton-based approaches
which are robust to viewpoint variation, the view-
invariance is still a major challenge for depth-based
action recognition. In fact, there are recently some
researches that make the depth-based more robust to
the view angle variation, such as the work of Hossein
et al. (Rahmani et al., 2014),they processed directly
the pointclouds of depth sequence using Histogram of
Oriented Principal Components (HOPC) descriptor,
which is robust to noise, viewpoint, scale and action
speed variations. However, the process of pointclouds
are very time consuming which makes this method so
far to be applicable in real-time.
A hybrid solution combining depth and skeleton
information is used in many research works. Most of
them use various depth descriptors around the joints
as features such as: (Wang et al., 2012b; Yang et al.,
2012), and (Ohn-Bar and Trivedi, 2013). Wang et
al., in (Wang et al., 2012b), use 3D joints position
and local occupancy patterns as features. Ohn-Bar
et al.(Ohn-Bar and Trivedi, 2013) propose to use the
HOG
2
descriptor around each joints instead of whole
depth pixels. Indeed, these methods are strongly de-
pendent on the accuracy of skeleton estimation, thus
VISION4HCI 2016 - Special Session on Computer VISION for Natural Human Computer Interaction
746

Figure 1: Snapshots of four information available in Mines-
Douai 3D dataset.
they do not make a substantial contribution in the
case of self-occlusions or when the skeleton estima-
tion failed.
3 BASE CLASSIFIER FOR
HUMAN ACTION
RECOGNITION
The goal of this section is to evaluate and analyze the
most relevant depth and skeleton base classifiers of
action recognition with respect to viewpoint variation,
to further show the contribution of combination meth-
ods to enhance the recognition accuracy and timing
performance.
3.1 Mines Douai Multiview 3D Dataset
Several 3D dataset have been created in the last years
for action recognition. However, most of them are
acquired from only one viewpoint angle which pre-
vent us from measuring the effect of person’s orien-
tation. Recently, Rahmani et al. (Rahmani et al.,
2014), created a multiview dataset but this dataset
is not well structured. Thus, the creation of new
publicly available multiview dataset to enhance the
study of view-invariant action recognition became a
necessary task. MinesDouai Multiview 3D dataset
contains four types of information (Figure 1): RGB,
depth, cleaned depth and human skeleton data, cap-
tured with only one kinect camera. For each acquisi-
tion, the subject performs the same action twice in
three orientations (30°,0°,-30°) in order to produce
the dissimilarity between the three viewpoint angles
even for the same subject.
This dataset includes 12 actions: one-hand wav-
ing, boxing, setting, two-hand waving, holding head,
phone answering, picking up, kicking, holding back,
Figure 2: Samples frames of Multiview MinesDouai 3D
dataset.
check watch, jumping, and throw over head. Each ac-
tion is performed by 8 actors. Figure 2 shows some
sample frames of our dataset captured from different
angles.
3.2 Skeleton-based Action Recognition
The extraction of a skeleton from depth information
was a big challenge in the last decades. Recently a ro-
bust skeleton estimation algorithm proposed by Shot-
ton et al. (Shotton et al., 2011) regenerates the inter-
est on skeleton-based action recognition. To study the
impact of viewpoint variation on the accuracy of ac-
tion recognition, we conducted our experimentation
with the most relevant state-of-the-art skeleton-based
approaches. Foremost, we started by Actionlet algo-
rithm (Wang et al., 2012b) and then we tested a four
alternative skeletal representations on our dataset us-
ing a combination of dynamic time warping, Fourier
Temporal Pyramid representation and linear SVM.
This algorithm pipeline is proposed by Vemulapalli
et al. (Vemulapalli et al., 2014). The four alterna-
tive skeletal representations tested on our dataset are:
Joint positions (JP), Pairwise relative positions of the
joints (RJP), Joint angles (JA), and Individual body
part locations (BPL).
To make the skeleton invariant to the orientation
and the location in the scene, Vemulapalli et al. (Vem-
ulapalli et al., 2014) pre-process this information with
the following operations:
• For scale-invariant: the authors consider person-
centric coordinate as reference and they apply the
Toward a Real Time View-invariant 3D Action Recognition
747
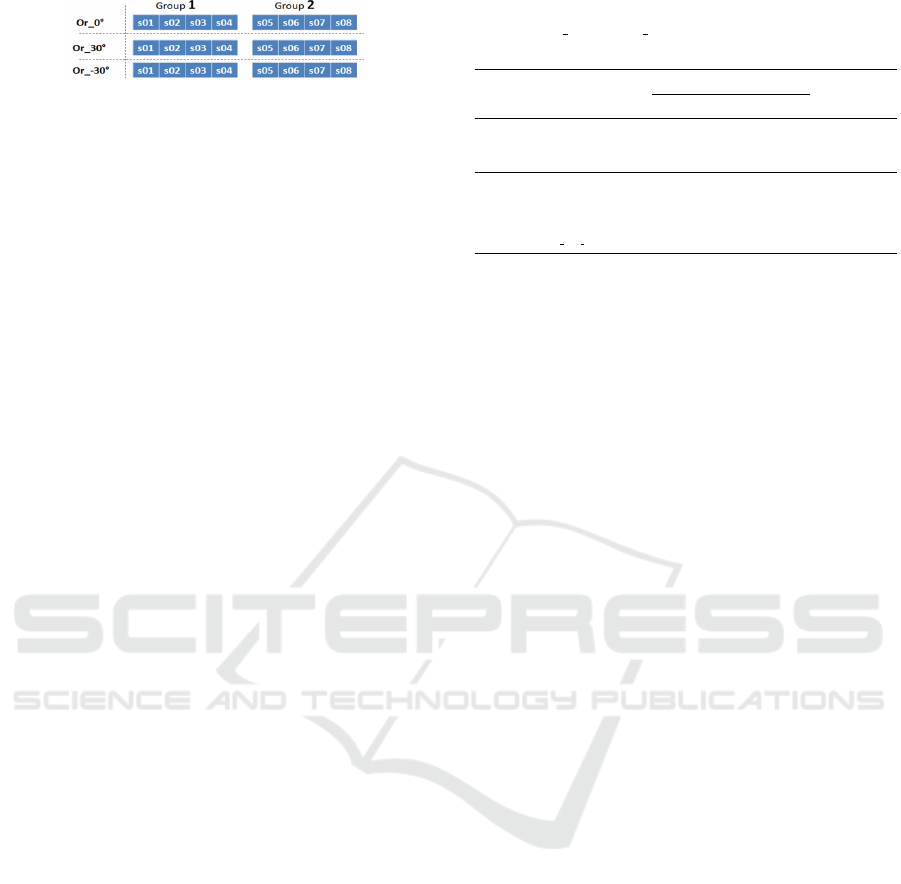
Figure 3: Six subgroups used for classification.
normalization by taking one of the skeletons as
reference;
• For view-invariance: a rotation is applied to the
skeleton such that the vector from right hip to left
hip is parallel to the global x-axis.
For fair comparison between different skeleton repre-
sentations, we have used the same experimental set-
ting with all the representations. The obtained results
are summarized in Table 1.
3.3 Depth-based Action Recognition
The skeleton estimation from RGB-D image is accu-
rate under experimental settings, but the estimation of
the skeleton remains limited. As previously stated, it
has difficulties to correctly work in the presence of
self-occlusion between body segments and the esti-
mation completely fails, for instance, in video surveil-
lance when the body is not in front of the camera (Xia
and Aggarwal, 2013). Designing an efficient depth
representation for action recognition can give better
results in these adverse conditions. After, reviewing
the most relevant state-of-the-art depth-based action
recognition approaches, we choose three algorithms:
DMM (Chen et al., 2013), HON4D (Oreifej and Liu,
2013), and HOG
2
(Ohn-Bar and Trivedi, 2013). This
selection is based on the recognition accuracy pre-
sented in their papers with different benchmarks, and
on execution time. We evaluated these three algo-
rithms on our dataset. The experimental results are
presented in Table 1.
3.4 Discussion and Evaluation of Base
Classifiers
In order to evaluate the various skeleton- and depth-
based classifiers, we have divided our dataset into 2
groups. Each group contains 4 subjects with three
orientations (2*3 subgroups) as shown in Figure 3. To
perform the test, one subgroup is used for training and
the other for testing. Table 1 summarizes the results.
The “same view test” refers to the average of accuracy
rates obtained when the train and test subgroupes are
from the same viewpoint angle. The “cross-view test”
refers to the case where train and test subgroups are
from different viewpoint angles. Table 1 also contains
execution duration for each algorithm.
Table 1: Comparison between the state-of-art results with
MinesDouai Multiview 3D Dataset (bold indicates highest
rate).
Cross Validation Test (4*4)
Duration (s)
Same View Cross-View
Depth
DMM 0.782 0.603
1.413
HON4D 0.893 0.766
19.21
HOG
2
0.878 0.742
3.083
Skel.
Actionlet 0.871 0.697
0.139
Joint Position (JP) 0.960 0.881
0.595
Relative Joints (RJP) 0.977 0.927
1.357
Joint Angles (JA) 0.913 0.721
2.016
SE3 Lie Algebra 0.967 0.883
1.212
Note that the depth-based algorithms are qui-
etly inaccurate in comparison with skeleton-based
ones and especially for cross-view tests. Moreover,
HON4D gives the best results in both same-view
and cross-view tests among depth-based approaches.
HOG
2
gives a very acceptable result compared with
DMM and with HON4D (there are only a difference
of 2%). To put things into perspective with this little
difference between HOG
2
and HON4D, it has to be
noted that the first widely outperforms the second in
terms of computation time. These performances are
recorded using a PC with 2.53GHz Intel Xeon CPU
with 24 GB RAM (only 4GB was used).
The skeleton-based algorithms show high accu-
racy of recognition and robustness to viewpoint vari-
ations compared with depth-based approaches. The
Relative Joint Position (RJP) provides the best im-
provement on our dataset, achieving a maximum of
97.7% accuracy. The Actionlet algorithm (Wang
et al., 2012b) shows lower results in cross-view test.
The results of depth-based approaches in cross-
view tests show the limitations of these algorithms
to handle viewpoint variation. These results can be
explained by the fact that the appearance of each ac-
tion varies widely from one angle to the others. It
is then preferable to make various base classifiers
trained separately with different angles. The idea is to
predict the action of an unknown subject with the ap-
propriate base classifier which corresponds to his/her
orientation.
Among several difficulties of skeleton-based ap-
proaches we can mention the lack of precision and
self-occlusions caused by body parts. Note that the re-
sults in Table 1 are achieved using skeleton informa-
tion acquired under experimental settings. To study
the effects of instability of skeleton estimation on the
performance of action recognition, we simulated self-
occlusion and instability of skeleton by adding noise
to some joints randomly (like in the realistic sce-
nario). Then we conducted the test using the Rela-
tive Joint Position representation (RJP), which gave
the best results with our dataset. We conducted the
VISION4HCI 2016 - Special Session on Computer VISION for Natural Human Computer Interaction
748

Figure 4: Recognition rate accuracy computed with respect
to the amount of noise variation.
experimentation by increasing iteratively the ampli-
tude of the noise up to 25 dB. The obtained results
are depicted in Figure 4. We can see clearly that the
accuracy of action recognition using skeleton-based
approach decreased rapidly when the amount of noise
is greater than 3dB.
Therefore, to make the action recognition more
robust, the skeleton instability should be considered
by switching to another source of information such
as depth which are more robust to self-occlusion.
One of the simplest and efficient methods that can
be used to estimate the accuracy of the skeleton data
is the JointTrackingState information offered by Mat-
lab™(Matworks, MA, USA) Image Acquisition Tool-
box, which provides the extent of joint estimation ac-
curacy of each frame (confidence index).
By computing the mean of confidences indexes
of skeleton joints (Conf ) for a video sequence using
equation 1, we can deduce if the action recognition
using skeleton information is affected by the noise or
not.
SkeletonsJointsAccuracy =
p
∑
i=1
n
∑
j=1
con f (i, j)
n · p · max(con f )
(1)
s.t. n is the number of skeleton joints, p is the number
of frames in video sequence. max(conf) is the maxi-
mum reachable value for the confidence index.
4 PROPOSED ALGORITHM
In this section, we describe our method for human ac-
tion recognition. In the first step, four base classi-
fiers are used, one for skeleton-based approach and
three for depth-based approach, each one correspond-
ing to a different angle (i.e. 0°, 30°, -30°). These
base classifiers work in parallel to estimate the actions
performed by a subject using two different sources
of information (depth and skeleton). We could ex-
tend our algorithm to cover more than three orienta-
tions, by acquiring more samples. For depth-based
classifiers, we choose the human motion descriptor
HOG
2
, which is the fastest and that gave an accept-
able accuracy in same-view test, as seen previously.
For the Skeleton-based classifier, we choose the Rel-
ative Joint Position representation which gave a high
accuracy. The second step of our proposed method
is the combination of these base classifiers outputs to
achieve more accurate action recognition. The details
of the introduced methods are highlighted in the fol-
lowing subsections.
4.1 Depth-skeleton Fuzzy Switcher
Algorithm (DSFSA)
To design the overall action recognition framework,
we must consider the skeleton instability and the hu-
man body orientation. A fusion algorithm that takes
into account the limitations of each base classifier is
therefore necessary. We found that Fuzzy Switcher is
well suited for this task, as depicted in Figure 5. The
proposed DSFSA Algorithm is an expert rule-based
method for choosing the best base classifier. Our al-
gorithm uses two inputs and one output, as shown in
Figure 6.
Here, the term “fuzzy switcher” refers to the pro-
cess of combining two sets of information to produce
a better output (Singhala et al., 2014). That is, we
need to use the skeleton information when all joints
(or at least most of them) are accurate. In the pres-
ence of self-occlusion, which may lead to degradation
of skeleton-based classifiers, we have to eliminate its
use temporally by switching to depth-based one. Fur-
thermore, as explained in the previous section, it is
more accurate to predict the actions of a subject with
the depth-based classifier that corresponds to the sub-
ject orientation with respect to the camera. Thus, we
also switch between different depth-based classifiers
to produce better action recognition.
To describe the relationship between the input and
Figure 5: Overall architecture of the Depth-skeleton Fuzzy
Switcher Algorithm.
Toward a Real Time View-invariant 3D Action Recognition
749

Figure 6: Architecture of the fuzzy logic system.
the output, the following set of rules is applied :
Skel. Acc. = Good =⇒ SW = SVM
1
Skel. Acc. = Bad ∧ Orient. = Front =⇒ SW = SVM
2
Skel. Acc. = Bad ∧ Orient. = Right =⇒ SW = SVM
3
Skel. Acc. = Bad ∧ Orient. = Left =⇒ SW = SVM
4
The fuzzy rules are directly derived from the two ba-
sic rules defined at the beginning of this subsection
(related to skeleton accuracy and human body orien-
tation). In our case, the output of the fuzzy inference
system, SW (switch), is a dimensionless weighting
factor that emphasizes one of the four classifier as the
best for this recognition.
As shown in the Figure 6, the skeleton joint accu-
racy input is represented by two membership func-
tions. The parameters (Q
0
, Q
1
) are estimated us-
ing the Fuzzy C mean (FCM) algorithm. FCM is a
method of clustering which provides the cluster cen-
ters and the degree of affiliation for each data point
(Dwi Ade Riandayani, 2014). This information can
be used to construct fuzzy inference system. Fuzzy
partitioning is accomplished by an iterative optimiza-
tion of the following objective function (Eq. 2),
J
m
=
N
∑
i=1
C
∑
j=1
u
m
i j
||x
i
− c
j
||
2
, 1 ≤ m < ∞ (2)
s.t. m is a real number greater than one, x
i
is the i
th
measured data, c
j
is the center of the cluster, and u
i j
is the membership’s degree of x
i
in cluster j. The up-
date of cluster centers c
j
and the membership u
i j
are
determined by equation 3.
u
m
i j
=
1
∑
C
k=1
(
||x
i
−c
j
||
||x
i
−c
k
||
)
2
m−1
, c
j
=
∑
N
i=1
u
m
i j
· x
i
∑
N
i=1
u
m
i j
(3)
When the condition max
i j
|u
k+1
i j
− u
k
i j
| < ℑ is satis-
fied the iteration will stop, where ℑ is the ending
criterion between [0,1], and k are the iteration steps.
This process converges to a local minimum of J
m
. In
our experimentation, we have set the ending criterion
ℑ = 1e − 5 and the number of iteration k=100. We
obtained the couple (Q
0
, Q
1
)=(0.356, 0.716).
Several popular methods for defuzzification exist
in the literature such as max-membership principle,
centroid method, weighted average method, center of
sums, etc. (Singhala et al., 2014). In our algorithm,
the output of the fuzzy inference system is a dimen-
sionless weighting factor. Therefore, the weighted av-
erage defuzzification technique is well suited, and is
given by the following algebraic expression (eq. 4):
Defuz =
∑
4
i=1
P[i] ·W[i]
∑
4
i=1
W [i]
(4)
where Defuz is the output of fuzzy inference system,
P[i] is the extremum value of i
t
h output membership
function and W is the weight of the i
t
h rule.
4.2 Estimation of Human Body
Orientation
To recognize the action of subjects with the appro-
priate base classifier that corresponds to his/her ori-
entation, an accurate and robust orientation estimator
is required. In fact, it is a challenging task for many
researches, due to the wide variety of poses, actions
and body size which degrade the accuracy of esti-
mation. However, the existing methods in the liter-
ature are always based on gait cue considering that
the body orientation is nearly parallel to the moving
trend (Shinmura et al., 2015; Liu et al., 2013). Indeed,
for human-robot interaction usually the subjects are in
standing position and their actions or gestures are lim-
ited to the movement of some body’s segments, such
as check a watch. These kinds of actions make the
previous methods unable to handle the different body
orientations. To address these challenges, we propose
a new method based on a RGB-D sensor.
The proposed method is inspired from the work of
(Ozturk et al., 2009) in which they used RGB stream
of a camera mounted on the top of a roof. Then,
the combination of Shape Context and Scale-Invariant
Feature Transform (SIFT) features are used to esti-
mate the body orientation by matching the upper re-
gion of the body with predefined shape templates.
In our method we used the depth data to cap-
ture the body orientation by projecting the depth of
each frame onto an orthogonal Cartesian planes (Yang
et al., 2012; Chen et al., 2013). Then, we calculated
Depth Map (DM) of top-view projection to character-
ize the orientation as shown in Figure 7. The DM is
obtained by accumulating the absolute difference be-
tween two consecutive depth images across n frames
of a video sequence as following (eq 5):
DM
top
=
b
∑
i=a
|map
i
top
− map
i−1
top
| (5)
where i is the frame index, map
i
top
top-view projec-
tion of the i
th
frame, and [a, b] ∈ [2, n]
2
denote the first
VISION4HCI 2016 - Special Session on Computer VISION for Natural Human Computer Interaction
750

Figure 7: Three examples of DMs generated from different
view-point samples of Mines douai 3D dataset.
and last frame indexes.
We have fixed the same size of the DMs for all
samples. For training and testing feature sets, prin-
cipal component analysis (PCA) was used to reduce
the dimensionality in order to optimize computational
time.
To test the proposed algorithm, one half of the
samples of our dataset are used for training and the
other half for testing. An average recognition rate of
86.1% (248/288) was achieved. Figure 8 describes
the changes in the accuracy rate of orientation esti-
mation and the computing times, with respect to the
number of frames used to compute the DMs. When 2
frames were used to characterize the human body ori-
entation, the estimation was lower. When the number
of frames exceed 5, the estimation accuracy remains
around 85%.
Figure 8: Accuracy and timing performances computed
with respect to the number of frame variation.
4.3 Aggregation
Instead of using human body orientation as discrim-
inative criterion to switch between the three depth-
based classifiers, we propose another method of com-
bination based on outputs aggregation as shown in
Figure 9. Indeed, we only focus on the aggre-
gation of depth-based classifiers without including
the skeleton-based classifier. On the one side, the
switched method based on the skeleton instability es-
timation (eq. 1) has shown its robustness. On the
other side, it is difficult to know the variation of accu-
racy of skeleton-based classifier due to its rapid degra-
Figure 9: Overall architecture of the DS FS Algorithm with
Aggregation strategy.
dation in the case of self-occlusion or when the es-
timation of the skeleton failed. The aggregation of
the three depth-based classifiers is based on the class
likelihood provided by each base-classifier (SVMs).
The class likelihood information are obtained using
libsvm.
After training the three base-classifiers separately,
we consider two linear combination techniques: the
Majority Voting and the Investment.
4.3.1 Majority Voting (Kim et al., 2002)
It is the simplest method for combining various
SVMs. Let f
k
be the output of the k
th
SVM, C
j
be the
label of the j
th
class, and N
j
is the number of SVMs
whose decision is the j
th
class. The final decision for
an input vector x is given by:
f
mv
(x) = argmax
j
N
j
(6)
4.3.2 Investment
Rather than the voting approach that treats all depth-
based classifiers equally, investment technique aims
to infer reliability degree for each base-classifier (Li
et al., 2015; Pasternack and Roth, 2010). In this ap-
proach the classifiers uniformly “invest” their reliabil-
ity through their claimed values (the class). The con-
fidence in each claim increases proportionally with a
non-linear function G(x)= x
g
where g = 1.2 (eq 7),
B(v) =
∑
s∈S
v
w
s
|V
s
|
!
1.2
(7)
where v is the class, S
v
is the set of depth-based clas-
sifiers that provide this class, and |V
s
| is the number
of claims made by the classifier s. The depth-based
classifiers trustworthiness is computed by the sum of
the confidence in their decisions, weighted by the ra-
tio of trust previously contributed to each (relative to
the other base classifiers s
0
), as described in (eq 8).
w
s
=
∑
v∈V
S
B(v) ·
w
s
|V
s
|
∑
s
0
∈S
v
w
s
0
|V
s
0
|
(8)
Toward a Real Time View-invariant 3D Action Recognition
751
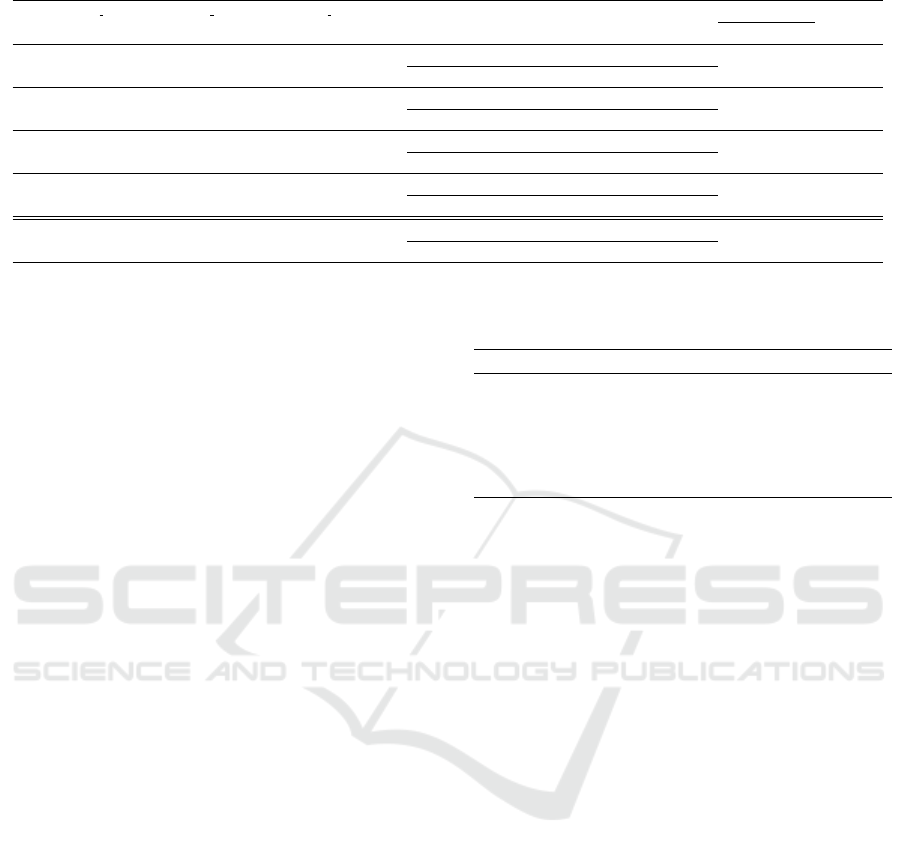
Table 2: Recognition rates for various test of depth-base-classifiers.
HOG
2
SVM
2
(0°) HOG
2
SVM
3
(30°) HOG
2
SVM
4
(-30°) Estimation of Orientation Fuzzy Switcher (only depth) Aggregation One SVM
Voting Invest
Test1
91.67 88.88 88.88 86.11% 97.22 97.22 97.22 97.22
Truth 100% 97.22
Test2
88.88 83.33 75 83.33% 88.88 86.11 91.67 91.67
Truth 100% 91.67
Test3
80.55 77.77 77.77 83.33% 91.67 86.11 91.67 91.67
Truth 100% 94.44
Test4
97.22 80.55 77.77 100% 97.22 94.44 100 97.22
Truth 100% 97.22
Mean
89.58 83.63 79.66 88.19 93.74 90.97 95.14 94.44
Truth 100% 95.14
5 EXPERIMENTAL RESULTS
In order to evaluate the performance of the proposed
methods, several tests were performed using fuzzy
switcher algorithm and the proposed methods of ag-
gregation (Majority Voting and Investment) on our
dataset. Firstly, we highlight the advantages of us-
ing various depth-based classifiers to reduce execu-
tion time and enhance accuracy of depth-based action
recognition. Then, we present the results of combina-
tion between depth and skeleton-based classifiers.
5.1 Combination of
Depth-base-classifiers
To show the advantages of combining various depth-
based classifiers in term of computation and accuracy
performances, we conducted the test with the pro-
posed fuzzy switcher algorithm using only the human
body orientation and the two methods of aggregation
without including skeleton-based classifier.
Firstly, we train three SVMs (depth-based), sep-
arately, with 4 subjects in each viewpoint orienta-
tion. Then, we choose 4 unseen subjects that per-
form 12 actions with different viewpoint angles and
we test the three trained depth-based classifiers inde-
pendently. The results are presented in Table 2.
Secondly, we conduct the tests with fuzzy
switcher algorithm using subjects orientation angles.
When we use the real subjects orientation labels
(given by the ground truth), the average accuracy of
the recognition is 95.14%. This result decreases by
2% (to 93.74 %), when we use the estimated sub-
jects orientations provided by the proposed human
body orientation estimator. The estimator achieves
a 88.19% accuracy rate in this test. The recogni-
tion rates are also calculated using both aggregation
methods. The majority voting aggregation gives the
worst accuracy of 90.97%, among the other combina-
Table 3: Time Performances.
Algorithm Time consumption (sec.)
Skeleton-based classifier (RJP) 1.357 (per video sequence)
Depth-based classifier (HOG
2
) 3.083 (per video sequence)
Skeleton accuracy 0.006
Body-orientation Estimator (10 frames) 0.290
Fuzzy system 0.0181
Aggregation (investisment) 0.1312
Aggregation + vote 0.1067
tion techniques, whereas the Investment aggregation
gives the best results with rate of 95.14%.
Finally, we test another approach based on a single
SVM trained with the three orientations. The features
used for training and testing are the concatenation of
HOG
2
and DMs features. This concatenation gives
a good rate of accuracy as shown in Table 2. How-
ever, this methods takes a long time for training and
for testing compared with the previous approaches,
due to the large size of the features vectors and of the
training set.
Table 2 shows clearly that the combination of dif-
ferent base-classifiers enhances the accuracy. As far
as execution time is concerned (Table 3), the extrac-
tion of features from depth sequence using HOG
2
de-
scriptor takes only 0.1s/frame. For the whole recog-
nition pipeline, including extraction of features and
classification, it reaches a maximum of 3s/sequence
for average of 35 frames. These results make the com-
bination approaches applicable in real-time, rather
than the previous view-invariant depth-based algo-
rithms that are more time consuming. Furthermore,
the fuzzy system and skeleton instability estimation
take less than 20 ms and the aggregation block takes
only 0.13s. These results confirm the appropriateness
of our algorithm for real time applications.
VISION4HCI 2016 - Special Session on Computer VISION for Natural Human Computer Interaction
752
Figure 10: Variation of sketeleton accuracy estimation.
Figure 11: Estimation human body Oriention using DM al-
gorithm.
Figure 12: Output of Depth skeleton Fuzzy switcher Algo-
rithm (DS FSA) during testing.
5.2 Combination between Depth and
Skeleton-base-classifiers
In the second stage of our experimentation, we in-
cluded the skeleton information. We conducted our
test using Depth skeleton Fuzzy switcher Algorithm
(DS FSA). In the following, we present only the case
when the skeleton information are not accurate by
adding a Gaussian White noise of 5dB to half of the
testing samples alternatively (cf. Figure 10). Fur-
thermore, the viewpoint angles of testing samples are
taken randomly as shown on Figure 11.
Figure 12 shows the output of Fuzzy Inference
System. When the skeleton estimation is good the
DS
FSA switch to the skeleton-based classifier. In
the case of skeleton instability (skeletons are noisy),
the DS FSA detects this instability easily, and does
not use the skeleton information by switching to one
Table 4: Comparison with the different combinations.
Algorithm Accuracy
SVM
1
Skelton RJT (1/2 skeletons noisy 5dB) 79.17
SVM
2
HOG
2
0° 89.58
SVM
3
HOG
2
30° 83.63
SVM
4
HOG
2
-30° 79.66
Fuzzy + viewpoint estimation (Depth+Skelton) 95.83
Fuzzy + Aggregation (Investment) 97.91
of the three depth-based classifiers. Similarly, for the
other methods of aggregation, the DS FSA switches
to the output of aggregation block, as seen on Figure
9. The results are detailed in Table 4.
We tested two variants of combination methods
for DS FSA. On one hand, we included the subject
orientation angles provided by our proposed human
body orientation estimator. On the other hand, we ap-
plied the investment aggregation method. The results
show that the combination of depth and skeleton in-
formation notably enhances the accuracy. Moreover,
the use of investment aggregation provides the best
average accuracy of 97.91%. As result, the combina-
tion between the DS FSA and investment aggregation
is the most appropriate framework that provides the
best accuracy and timing performance.
6 CONCLUSION
In this paper we introduced a novel approach of com-
bining skeleton and depth information based on the
amalgamation of several base classifiers. Further-
more, we proposed a new method for the estimation
of human body orientation which is completely inde-
pendent of human gait direction. In order to perform
view dependency tests, we have created a new mul-
tiview public dataset
1
. The results showed that our
proposed method is robust to viewpoint variation and
skeleton accuracy degradation. Furthermore, due to
its computation time efficiency, it is suitable for real-
time application.
Future work includes the extension of our algo-
rithm to more than three viewpoint orientations. Since
it is not a trivial task to acquire sufficient data for each
viewpoint angle, an efficient solution can be used to
extend any 3D action dataset to different viewpoint
using point-clouds transformation.
1
Information to dowload the dataset can be found at:
http://ia.ur.mines-douai.fr/en/datasets/
Toward a Real Time View-invariant 3D Action Recognition
753

REFERENCES
Chen, C., Liu, K., and Kehtarnavaz, N. (2013). Real-
time human action recognition based on depth motion
maps. Journal of Real-Time Image Processing, pages
1–9.
Dwi Ade Riandayani, Ketut Gede Darma Putra, P. W. B.
(2014). Comparing fuzzy logic and fuzzy c-means
(fcm) on summarizing indonesian language docu-
ment. Journal of Theoretical and Applied Information
Technology, 59(3):718–724.
Kim, H.-C., Pang, S., Je, H.-M., Kim, D., and Bang, S.-Y.
(2002). Support vector machine ensemble with bag-
ging. In Pattern recognition with support vector ma-
chines, pages 397–408.
Laptev, I. and Lindeberg, T. (2003). Space-time interest
points. In Computer Vision, 2003. Proceedings. Ninth
IEEE International Conference on, pages 432–439.
Li, Y., Gao, J., Meng, C., Li, Q., Su, L., Zhao, B., Fan, W.,
and Han, J. (2015). A survey on truth discovery. arXiv
preprint arXiv:1505.02463.
Liu, W., Zhang, Y., Tang, S., Tang, J., Hong, R., and Li,
J. (2013). Accurate estimation of human body ori-
entation from rgb-d sensors. IEEE Transactions on
Cybernetics, 43(5):1442–1452.
Ohn-Bar, E. and Trivedi, M. (2013). Joint angles similar-
ities and hog2 for action recognition. In Computer
Vision and Pattern Recognition Workshops (CVPRW),
2013 IEEE Conference on, pages 465–470.
Oreifej, O. and Liu, Z. (2013). Hon4d: Histogram of ori-
ented 4d normals for activity recognition from depth
sequences. In Computer Vision and Pattern Recogni-
tion (CVPR), 2013 IEEE Conference on, pages 716–
723.
Ozturk, O., Yamasaki, T., and Aizawa, K. (2009). Tracking
of humans and estimation of body/head orientation
from top-view single camera for visual focus of atten-
tion analysis. In Computer Vision Workshops (ICCV
Workshops), 2009 IEEE 12th International Confer-
ence on, pages 1020–1027.
Pasternack, J. and Roth, D. (2010). Knowing what to
believe (when you already know something). In
Proceedings of the 23rd International Conference on
Computational Linguistics, pages 877–885.
Peng, X., Wang, L., Qiao, Y., and Peng, Q. (2014). A joint
evaluation of dictionary learning and feature encoding
for action recognition. In Pattern Recognition (ICPR),
2014 22nd International Conference on, pages 2607–
2612.
Rahmani, H., Mahmood, A., Q Huynh, D., and Mian, A.
(2014). Hopc: Histogram of oriented principal com-
ponents of 3d pointclouds for action recognition. In
Fleet, D., Pajdla, T., Schiele, B., and Tuytelaars, T.,
editors, Computer Vision ECCV 2014, volume 8690
of Lecture Notes in Computer Science, pages 742–
757.
Shinmura, F., Deguchi, D., Ide, I., Murase, H., and Fu-
jiyoshi, H. (2015). Estimation of human orientation
using coaxial rgb-depth images. In International Con-
ference on Computer Vision Theory and Applications
(VISAPP), pages 113–120.
Shotton, J., Fitzgibbon, A., Cook, M., Sharp, T., Finoc-
chio, M., Moore, R., Kipman, A., and Blake, A.
(2011). Real-time human pose recognition in parts
from single depth images. In Computer Vision and
Pattern Recognition (CVPR), 2011 IEEE Conference
on, pages 1297–1304.
Singhala, P., Shah, D. N., and Patel, B. (2014). Tempera-
ture control using fuzzy logic. International Journal
of Instrumentation and Control Systems, 4(1):110.
Vemulapalli, R., Arrate, F., and Chellappa, R. (2014). Hu-
man action recognition by representing 3D skeletons
as points in a lie group. In Computer Vision and Pat-
tern Recognition (CVPR), 2014 IEEE Conference on,
pages 588–595.
Wang, J., Liu, Z., Chorowski, J., Chen, Z., and Wu, Y.
(2012a). Robust 3d action recognition with random
occupancy patterns. In Computer vision–ECCV 2012,
pages 872–885.
Wang, J., Liu, Z., Wu, Y., and Yuan, J. (2012b). Mining
actionlet ensemble for action recognition with depth
cameras. In Computer Vision and Pattern Recogni-
tion (CVPR), 2012 IEEE Conference on, pages 1290–
1297.
Xia, L. and Aggarwal, J. (2013). Spatio-temporal depth
cuboid similarity feature for activity recognition us-
ing depth camera. In Computer Vision and Pat-
tern Recognition (CVPR), 2013 IEEE Conference on,
pages 2834–2841.
Xia, L., Chen, C.-C., and Aggarwal, J. (2012). View invari-
ant human action recognition using histograms of 3d
joints. In Computer Vision and Pattern Recognition
Workshops (CVPRW), 2012 IEEE Computer Society
Conference on, pages 20–27.
Yang, X. and Tian, Y. (2012). Eigenjoints-based action
recognition using naive-bayes-nearest-neighbor. In
Computer Vision and Pattern Recognition Workshops
(CVPRW), 2012 IEEE Computer Society Conference
on, pages 14–19.
Yang, X., Zhang, C., and Tian, Y. (2012). Recognizing ac-
tions using depth motion maps-based histograms of
oriented gradients. In Proc. of the 20th ACM interna-
tional conference on Multimedia, pages 1057–1060.
VISION4HCI 2016 - Special Session on Computer VISION for Natural Human Computer Interaction
754
