
Bees Swarm Optimization Metaheuristic Guided by Decomposition for
Solving MAX-SAT
Youcef Djenouri
1
, Zineb Habbas
2
and Wassila Aggoune-Mtalaa
3
1
LRDSI, Computer Science Department, Saad Dahleb University, Blida, Algeria
2
Department of Computer Science, University of Lorraine, Metz, France
3
LIST, Luxembourg Institute of Science and Technology G.D., Esch-sur-Alzette, Luxembourg
Keywords:
BSO, MAX-SAT, Decomposition Methods, Kmeans, BSOGD.
Abstract:
Decomposition methods aim to split a problem into a collection a collection of smaller interconnected sub-
problems. Several research works have explored decomposition methods for solving large optimization prob-
lems. Due to its theroretical properties, Tree decomposition has been especially the subject of numerous
successfull studies in the context of exact optimization solvers. More recently, Tree decomposition has been
successfully used to guide the Variable Neighbor Search (VNS) local search method. Our present contribution
follows this last direction and proposes two approaches called BSOGD1 and BSOGD2 for guiding the Bees
Swarm Optimization (BSO) metaheuristic by using a decomposition method. More pragmatically, this paper
deals with the MAX-SAT problem and uses the Kmeans algorithm as a decomposition method. Several ex-
perimental results conducted on DIMACS benchmarks and some other hard SAT instances lead to promising
results in terms of the quality of the solutions. Moreover, these experiments highlight a good stability of the
two approaches, more especially, when dealing with hard instances like the Parity8 family from DIMACS.
Beyond these first promising results, note that this approach can be easily applied to many other optimization
problems such as the Weighted MAX-SAT, the MAX-CSP or the coloring problem and can be used with other
decomposition methods as well as other metaheuristics.
1 INTRODUCTION
The NP-Complete satisfiability problem (SAT) is of
central importance in computation theory. SAT for-
malism is used to model many academic or real prob-
lems like coloring problem, decision support and
automated reasoning. Formally, SAT is defined as
follows: given a set of n boolean variables V =
{v
1
, v
2
, ..., v
n
}, a Conjunctive Normal Form (CNF) is
a conjunction of clauses, each clause being a disjunc-
tion of literals, while a literal is a variable v
i
from V
or its negation, noted ¬v
i
. A clause is satisfied when
at least one of its literals is set to true. A CNF is
satisfied if an assignment of some variables in V sat-
isfies all the clauses. The SAT problem asks for an as-
signment of some variables in V that satisfies a CNF
F. The problem is said SAT if such an assignment
exists and UNSAT otherwise. This paper addresses
the NP-Hard MAX-SAT problem, a generalization of
SAT. Given a CNF formula F, the objective of MAX-
SAT is to satisfy as many clauses of F as possible.
A solution of a MAX-SAT instance is a complete in-
stantiation of variables in V that satisfies a maximal
number of clauses. As with many NP-complete prob-
lems, existing algorithms dedicated to SAT are either
complete or incomplete. A complete algorithm aims
to solve the problem while an incomplete algorithm
aims only to find satisfying instantiations. The most
effective complete algorithms are based on the DPLL
procedure (Davis et al., 1960). They mainly differ
by the heuristics used for the branching rule (Dubois
et al., 1996)5. MAX-SAT is a generalization of SAT.
But while SAT is a decision problem, MAX-SAT is its
optimization version. Of course, finding the optimal
solution for a NP-Complete optimization problems is
too time expensive because of the exponential time
complexity.
To deal with this problem, many incomplete meth-
ods are proposed for solving MAX-SAT problems.
GSAT (Li, 1997) is a randomized local search. It
starts drawing randomly a valuation for the variables
and then makes a certain number of flips on variables
that reduce the number of unsatisfiable clauses. This
process is repeated until getting the optimal solution
472
Djenouri, Y., Habbas, Z. and Aggoune-Mtalaa, W.
Bees Swarm Optimization Metaheuristic Guided by Decomposition for Solving MAX-SAT.
DOI: 10.5220/0005810004720479
In Proceedings of the 8th International Conference on Agents and Artificial Intelligence (ICAART 2016) - Volume 2, pages 472-479
ISBN: 978-989-758-172-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

or reaching a limit on the number of attempts. Walk-
sat (Selman et al., 1994) is an extended version of
GSAT. A noise represented by a probabilistic instruc-
tion, is introduced in the procedure to achieve the
random walk move. A variable drawn randomly is
considered with a probability p and with (1− p) the
variable that yields to the maximum satisfied clauses
is selected. Then it improves the obtained solution
by a local search method. In (Drias et al., 2005), a
Bees Swarm Optimization metaheuristic (BSO) has
been proposed for solving Weighted Maximum Sat-
isfiability Problem. Currently, a trend for improv-
ing incomplete algorithms, consists in combining
wisely the best properties from different approaches.
In (Lardeau et al., 2006), a new hybrid algorithm
(called GASAT) embedded a tabu search procedure
into the evolutionary framework. The GASAT perfor-
mance comes from its original and highly specialized
crossover operators, a powerful tabu search method
and the interaction between these two methods. To
enhance the performance of MAX-SAT solvers and
in order to deal with hard and large instances, some
solving approaches propose to explore the structural
properties of the problem.
This paper follows this line of research and its
main purpose is to improve the BSO metaheuristic
by decomposing the problem before solving it. Ti
decompose a problem several clustering techniques
can be found in the literature. In the context of data
mining, unsupervised learning algorithms correspond
to the most popular class. In general, the cluster-
ing consists in grouping together or putting in the
same cluster homogeneous data. In this paper, the
Kmeans algorithm was selected for the decomposi-
tion step. Based on structural knowledges coming
from Kmeans, this paper proposes two extended BSO
algorithms guided by decomposition named BSOGD1
and BSOGD2. In BSOGD1 each bee of the colony
considers as its region only a part of the problem that
coincides with a particular cluster. The bee returns
a partial modification of the “reference solution” be-
cause it can access to variables in only one cluster. A
bee in BSOGD2 can access to all the clusters and has
consequently a more important knowledge about the
structural properties of the instance to be solved. To
validate the proposed approaches, experimental stud-
ies have been carried out on DIMACS and some hard
Uniform− Random−3− SAT instances, the first re-
sults reveal that the our approaches outperform the
state of the art MAX-SAT approaches.
The reminder of this paper is organized as fol-
lows. Section 2 presents the BSO-MAXSAT algo-
rithm. Section 3 concerns our main contributions and
mainly presents the two proposed algorithms. The ex-
perimental results of our proposition are reported in
section 4. Finally, section 5 concludes the present pa-
per by some remarks and perspectives.
2 THE BSO-MAXSAT
ALGORITHM
In (Drias et al., 2005), a Bees Swarm Optimization al-
gorithm for solving the Weighted MAX-SAT problem
was proposed. MAX-SAT is a particular Weighted
MAX-SAT problem in which the weight associated
with each clause is 1. The main principle of this ap-
proach called BSO-MAXSAT is formally resumed by
algorithm 1.
Algorithm 1: BSO-MAXSAT algorithm.
Input: A MAX-SAT instance P
Begin
1: Sref ← Initial
Solution
2: while non stop do
3: TabuList ← Sref
4: FindSearchRegion (Sref, k, S
R1
, S
R2
, . . . , S
Rk
)
5: for each bee i do
6: LocalSearch ( S
Ri
, BestSol
i
)
7: TableDance ← BestSol
i
8: end for
9: Sref ← BestSolution(TableDance)
10: end while
End
First, the initial bee BeeInit creates the solu-
tion reference named Sref and saves it in a Tabu
list. From this solution Sref, a set of k regions R =
{S
R1
, S
R2
, . . . , S
Rk
} is determined thanks to the proce-
dure FindSearchRegion. After that, each bee b
i
is
assigned to a region S
Ri
in order to explore it using
the local search procedure (LocalSearch). Finally,
the communication between bees is performed via the
TableDance, in order to elect the best solution that
will be the solution reference for the next iteration.
• The Evaluation of the Solution: A solution s of
BSO-MAXSAT is an instantiation of n variables,
where the i
th
element is set to 0 if the variable
is assigned to false and set to 1 if the variable is
assigned to true. The evaluation of s is based on
the number of clauses satisfied by S.
• Determination of Regions: Theaim of procedure
FindSearchRegion is to divide the space of solu-
tions into k disjoint regions. Given the solution
reference Sref, a parameter Flip is introduced in
order to ensure the diversification step. Then, k
Bees Swarm Optimization Metaheuristic Guided by Decomposition for Solving MAX-SAT
473

disjoint solutions are generated where the i
th
so-
lution is obtained by changing successfully from
Sref the bits: {(1 × Flip) + i, (2× Flip) + i, (3×
Flip) + i, ...n− i}.
• Local Search Process: The aim of procedure Lo-
calSearch is to explore a region by identifying in
each step the neighbors of a given solution. Given
the solution s, this operation ensures the intensifi-
cation by changing only one bit of s at a time.
This algorithm was tested on the well known BMC
instances
1
. The obtained results were very promis-
ing by finding the optimal solution in most of the
cases. However, the performance of BSO-MAXSAT
decreases when dealing with large instances and hard
ones. To cope with this problem, two approaches are
proposed in the next section to guide BSO-MAXSAT
by exploring some structural knowledge coming from
a decomposition.
3 BSO GUIDED BY
DECOMPOSITION
This section presents the main contributions of this
paper. First the principle of Kmeans for SAT problem
is described in subsection 3.1. Then two different ap-
proaches to guide BSO by using decomposition will
be formally described in subsection 3.2 and subsec-
tion 3.3.
3.1 Kmeans for Decomposing SAT
K-means is one of the simplest unsupervised learning
algorithms which can solve the well known clustering
problem. The procedure follows a simple and easy
way to classify a given data set through a certain num-
ber of clusters (assume k clusters) fixed a priori. The
main idea is to define k centroids, one for each clus-
ter. The centroids should be placed in a cunning way
because the clustering result depends on their loca-
tion in the clusters. In order to optimize the efficiency
of the outcomes, it is judicious to place them as far
as possible from each other. The next step is to take
each point belonging to a given data set and associate
it to the nearest centroid. When no point is pending,
the first step is completed and an early grouping is
done. At this stage we need to re-calculate k new cen-
troids for the new clusters resulting from the previous
step and iterate the process. The latter stops when no
more changes of the clusters are observed, in other
words when no centroid move any more. To adapt the
1
http://www.cs.ubc.ca/
˜
hoos/SATLIB/benchm.html
Kmeans procedure on clauses clustering, we propose
a new similarity and center of gravity computation for
clauses.
3.1.1 Similarity Between Clauses
The similarity between two clauses represents the
degree of consistency between them. On the con-
trary their dissimilarity denotes the inconsistency be-
tween them. Intuitively they are similar when they
share a lot of variables and they are dissimilar if they
are different. Let us propose as a similarity mea-
sure denoted Dist
clauses between two clauses c
1
and
c
2
the following formula: Dist clauses(c
1
, c
2
) = n −
ncv(c
1
, c
2
) where ncv(c
1
, c
2
) is the number of com-
mon variables between c
1
and c
2
.
This distance is a validmetric because it meets the fol-
lowing mathematical properties of a metric distance
function, which are:
• ∀(c
1
, c
2
) ∈ C
2
Dist
clauses(c
1
, c
2
) ∈ R
• ∀c ∈ C Dist
clauses(c, c) = 0
• ∀(c
1
, c
2
) ∈ C
2
Dist
clauses(c
1
, c
2
) =
Dist
clauses(c
2
, c
1
)
• ∀(c
1
, c
2
, c
3
) ∈ C
3
Dist
clauses(c
1
, c
2
) ≤
Dist clauses(c
1
, c
3
) + Dist clauses(c
3
, c
2
)
Example 1. Consider a SAT instance defined as the
set of variables V = {v
1
, v
2
, v
3
, v
4
} and the two fol-
lowing clauses c
1
and c
2
:
• c
1
: v
1
, v
2
, v
3
.
• c
2
: v
2
, v
4
, v
3
.
The common variables of c
1
and c
2
are {v
2
, v
3
} so
ncv(c
1
, c
2
) = 2 and Dist clauses(c
1
, c
2
) = 1
3.1.2 Centroid Computation
Consider the set of clauses C = {c
1
, c
2
, ..., c
r
}. The
aim is to find the clause corresponding to the centroid.
The idea is to compute the frequency of each variable
among all the clauses in a same cluster. The length
of the clause center noted l which corresponds to the
average number of items of all the r clauses is deter-
mined as follows: l =
∑
r
i=1
|c
i
|
m
. Then, the variables of
the r clauses are sorted according to their concurrency
in the r clauses and only the l frequent variables are
kept in a vector called Freq as follows:
center
clause[Freq[ j]] = 1
∀ i 6= Freq[ j] center clause[i] = 0
Example 2. Let be the MAX-SAT following problem:
F = (¬v
1
) ∧ (¬v
2
∨ v
1
) ∧ (¬v
1
∨ ¬v
2
∨ ¬v
3
) ∧ (v
1
∨
v
2
) ∧(¬v
4
∨ v
3
) ∧(¬v
5
∨ v
3
)
Note that this problem is UNSAT because there is no
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
474
possible value for v
1
or v
2
that satisfies the clause v
1
∨
v
2
. The success ratio of this instance is 83% because
only 5 clauses out of 6 can be satisfied.
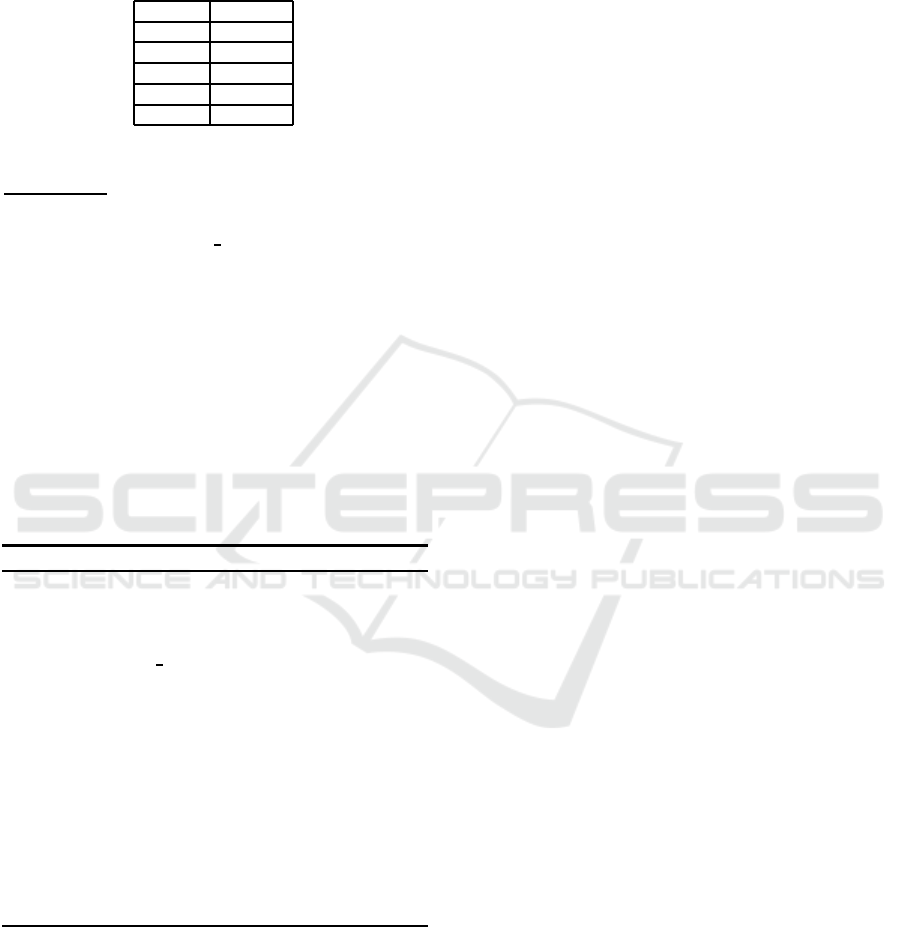
Table 1: Variables and their Frequency.
Variables Frequency
v
1
04
v
2
03
v
3
03
v
4
01
v
5
01
To compute the center-clause of the six ones c
1
to c
6
, we first compute the centroid l. Here l =
1+2+3+2+2+2
6
= 2. Then, the l frequent variables are
selected. According to the table 1, {v
1
, v
2
} are fre-
quent variables. So center
clause = {v
1
, v
2
}.
3.2 BSOGD1: A First BSO Algorithm
Guided by Decomposition
This section aims to present a first BSO algorithm
Guided by Decomposition called BSOGD1. Intu-
itively, BSOGD1 proceeds like BSO-MAXSAT, ex-
cept that each bee explores its region by taking into
account the structural knowledge coming from the de-
composition step (the clusters and/or separators). The
principle of BSOGD1 is formally described by algo-
rithm 2.
Algorithm 2: Algorithm BSOGD1.
Input: A MAX-SAT instance P
Begin
1: Decompose(P, k, G
1
, G
2
, ..., G
k
)
2: Sref ← Initial
Solution
3: FindSearchRegion1 ( k,G
1
, G
2
, ... , G
k
, R
1
,R
2
,
..., R
k
)
4: while non stop do
5: TabuList ← Sref
6: for each bee i do
7: LocalSearch1( Sref , R
i
, BestSol
i
)
8: TableDance ← BestSol
i
9: end for
10: Sref ← BestSolution1(TableDance)
11: end while
12: End
BSOGD1 consists of two main steps described as
follows:
• The first step (Procedure decompose) partitions
the constraint network corresponding to the ini-
tial problem P to be solved in order to identify
some relevant structural components such as the
clusters and the separators for instance. The de-
composition method used in this algorithm is the
Kmeans one presented in subsection 3.1. The pro-
cedure Decompose(P, k, G
1
, G
2
, ..., G
k
) splits a
given MAX-SAT instance P into a collection of k
clusters G
1
, G
2
, ..., G
k
, where k is the number of
bees. Each cluster is a subset of the initial set of
clauses of P. A clause belongs to only one clus-
ter. Two clusters Gi and G j are connected if they
share at least one variable v, which is a variable
used both by a clause of Gi and Gj.
• The second step concerns the principle of BSO
for solving MAX-SAT. The specificity of this ap-
proach is to use the procedure FindSearchRe-
gion1 instead of the conventional procedure of
BSO for determining the regions. The proce-
dure FindSearchRegion1 takes as input a set
of clusters G
1
, G
2
, ..., G
k
obtained from the
Kmeans procedure and returns a collection of re-
gions R
1
, R
2
. . . , R
k
. Initially, a set of variables
Var(G
i
) in G
i
is assigned to each region R
i
. When
a variable v belongs simultaneously to both R
i
and
R
j
it is removed from the cluster that contains the
minimum clauses including v. This heuristic gen-
erates independent regions allowing each bee to
improve locally the solution. The procedure Lo-
calSearch1 improvesin the solution Sref only the
variables of its region and returns in TableDance a
solution with a partial improvement. The function
BestSolution1 determines the next solution Sref
as follows:
Sref ← s ← BestSol
1
[R
1
] ⊙ . . . ⊙ BestSol
1
[R
k
]
where BestSol
1
[R
i
] is the partial solution found by
a bee i and ⊙ is a simple concatenation of the par-
tial solutions.
3.3 BSOGD2: A Second BSO
Algorithm Guided by
Decomposition
BSOGD2 differs from BSOGD1 by the determination
of regions, the local search procedure and the election
of the next solution Sref . BSOGD2 determines the
regions in a conventional way, like BSO-MAXSAT.
Howeverunlike BSO-MAXSAT, each bee explores its
own region by considering in its search all the clusters
G
1
, G
2
, ..., G
k
. This heuristic enables a bee to guide
more finely its research because ih has a global in-
formation unlike than the bee in BSOGD1. The next
solution Sref is the best solution among all the solu-
tions found by the bees. The principle of BSOGD2 is
formally described by algorithm 3.
Bees Swarm Optimization Metaheuristic Guided by Decomposition for Solving MAX-SAT
475

Algorithm 3: Algorithm GDBSO2.
Input: A MAX-SAT instance P
Begin
1: Decompose(P, k, G
1
, G
2
, ..., G
k
)
2: Sref ← Initial
Solution
3: while non stop do
4: TabuList ← Sref
5: FindSearchRegion2(Sref, k, S
R1
,S
R2
, . ..,
S
Rk
)
6: for each bee i do
7: LocalSearch2(S
R1
, G
1
, G
2
, ..., G
k
, Sol
i
)
8: TableDance ← Sol
i
9: end for
10: Sref ← BestSolution(TableDance)
11: end while
12: End
4 PERFORMANCE ANALYSIS
4.1 Experimental Conditions
To validate the proposed approaches several experi-
ments were carried out in a Single Machine Pentium-
I3 with 4Go memory. The proposed approaches have
been implemented using Java environment and tested
on 21 instances of the well known DIMACS instances
and 10 Uniform Random-3-SAT instances. All the
considered instances are available at SATLIB site
2
.
The DIMACS instances used in this study were di-
vided into three classes aim-50, aim-100, and par-
ity8. The aim-50 class contains 8 different instances
involving 50 variables and a number of clauses which
varies from 80 to 100. The aim-100 class includes 8
instances defined on 100 variables, while the number
of clauses varies from 160 to 200. The last class con-
tains 5 instances of Parity8 with 350 variables and a
number of clauses varying from 1149 to 1171. More-
over, for the Uniform Random-3-SAT instances, the
number of variables varies from 20 to 250 while the
number of clauses varies from 91 to 1065.
In this section, the results of the following tests are
presented:
1. First, the results obtained with the BSO-MAXSAT
algorithm on the three classes of DIMACS in-
stances are compared to the ones obtained with
the GASAT algorithm (the well-known incom-
plete algorithm for the MAXSAT problem).
2. Then, the two proposed algorithms BSOGD1 and
BSOGD2 are compared to the BSO-MAXSAT
2
http://www.cs.ubc.ca/
˜
hoos/SATLIB/benchm.html
algorithm on the same instances (the DIMACS
ones).
3. Finally, in order to further analyze the gain of our
contribution, the two algorithms BSOGD1 and
BSOGD2 are confronted to each other on the Uni-
form Random-3-SAT instances.
To validate our approach from a practical point of
view, the following performance measures are consid-
ered: the CPU time, the average success rate (SR%)
and the best success rate (Best
SR%). Note that the
results reported in all the tables are an average of the
results obtained on 100 executions. Moreover, the
column (n,m) gives the size of an instance where n
is the number of variables and m is the number of
clauses. The execution times were not reported since
all the times are comparable, although the slight dif-
ferences are in favor of the BSO algorithm.
4.2 Comparison of the GASAT and the
Hybrid BSO-MAXSAT Algorithms
As mentioned in section 1, in GASAT, a simple local
search is added at the end of the Genetic Algorithm
to improve the quality of the final solution. In or-
der to compare BSO-MAXSAT to GASAT, the same
local search used in GASAT is added to the classical
BSO-MAXSAT. The resulting algorithm is called Hy-
brid Bees Swarm Optimization for Maximal Satisfia-
bility Problem (HBSO-MAXSAT).
Table 2 summarizes the results of the comparison
between these two algorithms. Note that for GASAT,
only the best success rates are presented by the au-
thors, while for HBSO-MAXSAT, both the average
success rate and the best success rates are presented.
Clearly, our approach presents a better stability. In-
deed the average results are almost closed to the best
ones, and are often around the order of 92% for the
first two groups of instances. Furthermore, the results
are also comparable for all instances (around 90%) for
each instance. For the third family, the best success
rates are of about 60%, because this class includes
very hard instances. However the stability of this ap-
proach is still kept. Unlike HBSO-MAXSAT, GASAT
presents too distant success rates from one instance
to another (only 6% for the instance 1-6yes1-2 and
100% for the instance 1-6-yes1-3). The results are
very bad for the third family of problems. Finally,
regarding the average results, HBSO-MAXSAT out-
performs everywhere GASAT. This encouraging re-
sult confirms the relevance of our idea that aims to
guide the BSO algorithm by decomposition.
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
476
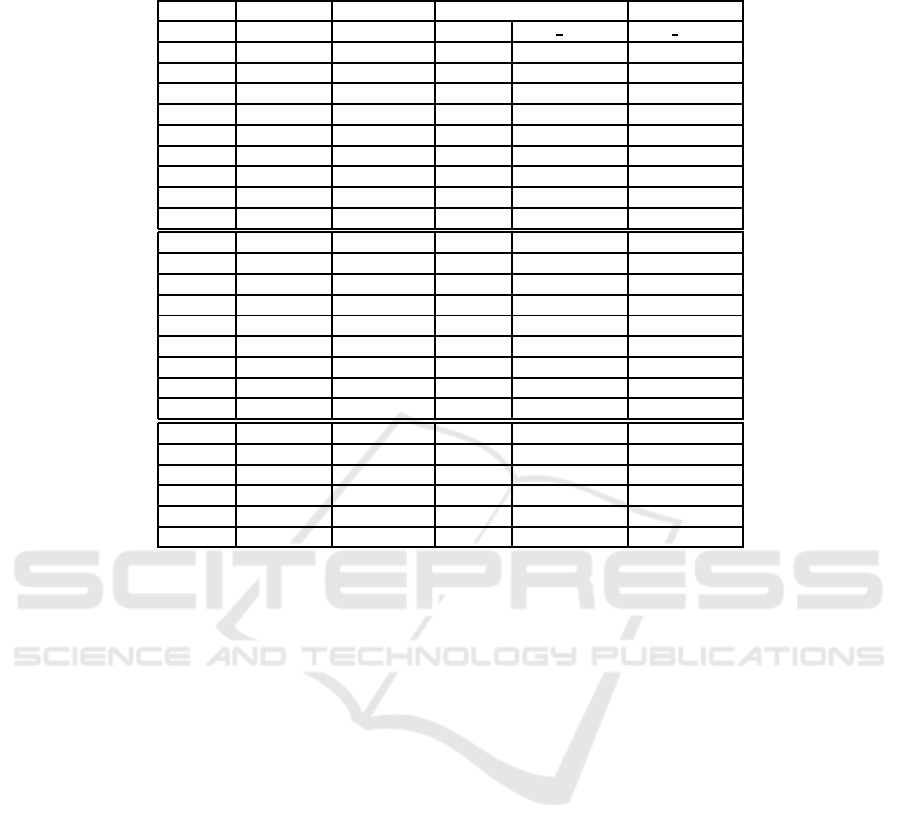
Table 2: Comparing HBSO-MAXSAT and GASAT algorithms.
Class Instances (n,m) HBSO-MAXSAT GASAT
SR (%) Best SR (%) Best SR (%)
1-6yes1-1 (50,80) 92,39 97,75 100
1-6yes1-2 (50,80) 93,12 97,5 6
1-6yes1-3 (50,80) 90,27 93,75 100
aim50 1-6yes1-4 (50,80) 90,01 93,75 100
2-0yes1-1 (50,100) 91,96 95 68
2-0yes1-2 (50,100) 90,53 95 100
2-0yes1-3 (50,100) 92,13 97 100
2-0yes1-4 (50,100) 90,39 95 100
Average 91,35 95,59 84,25
1-6yes1-1 (100,160) 90,93 95 2
1-6yes1-2 (100,160) 91,96 96,25 0
1-6yes1-3 (100,160) 92,91 96,25 0
aim100 1-6yes1-4 (100,160) 92,37 96,25 0
2-0yes1-1 (100,200) 90,65 94 10
2-0yes1-2 (100,200) 90,34 93,5 74
2-0yes1-3 (100,200) 91,33 94 98
2-0yes1-4 (100,200) 92,06 95 18
Average 91,74 95,25 25,25
1 (350,1149) 55,51 60,57 17,02
2 (350,1157) 56,23 61,8 25,53
Parity8 3 (350,1171) 55 59,78 21,28
4 (350,1155) 54,18 58,78 15,22
5 (350,1171) 54,86 59,95 21,74
Average 55,16 60,18 20,16
4.3 Performance of the Approaches
Guided by Decomposition
The aim of this second series of tests is to show the
benefit obtained with the two proposed approaches.
For this purpose, the Hybrid version of BSOGD1
(constructed in the same manner as the HBSO-
MAXSAT algorithm) called (HBSOGD1 and the Hy-
brid BSOGD2 called (HBSOGD2 are compared to
HBSO-MAXSAT.
4.3.1 Results Obtained on the DIMACS
Instances
Table 3 shows the success rates and the best success
rates obtained using HBSO-MAXSAT, HBSOGD1 and
HBSOGD2 on the DIMACS instances. According
to this table, one can remark that thanks to the ex-
ploitation of the structural knowledge extracted from
the Kmeans decomposition (the clusters are intercon-
nected via small separators), both HBSOGD1 and
HBSOGD2 behave better than the HBSO-MAXSAT
approach in all the cases. Moreover, when deal-
ing with hard instances of DIMACS such as the Par-
ity8, the success rate grows from 60% for HBSO-
MAXSAT to 72% for HBSOGD1 and 73% for HB-
SOGD2. These results are very promising.
4.3.2 Results Obtained on the Uniform
Random-3-SAT Instances
This last series of tests aims to more analyse the
behaviour of the proposed approaches when dealing
with harder MAXSAT instances. Therefore, the HB-
SOGD1 and HBSOGD2 algorithms are compared on
the Uniform Random-3-SAT instances. Table 4 shows
the success rates and the best success rates of HBSO-
MAXSAT, HBSOGD1 and HBSOGD2 for different in-
stances.
This table reveals that HBSOGD2 improves HB-
SOGD1. Indeed, the success rate of the second algo-
rithm is up to 90% in all the used instances, while it
does not exceed 90% in some cases for HBSOGD1.
This is because the bees in the second approach have
a global vision of the decomposed problem and each
bee can access to all clusters and their separators if
necessary. In the second approach, each bee im-
proves the worst cluster, which is the one that has
the least satisfied clauses. Nevertheless, the bees in
the first approach have access to only a restricted part
of the problem, which more specifically refers to a
cluster. Moreover, the obtained results show that the
two approaches improve again the results of HBSO-
MAXSAT by more than 13% in most cases.
Bees Swarm Optimization Metaheuristic Guided by Decomposition for Solving MAX-SAT
477
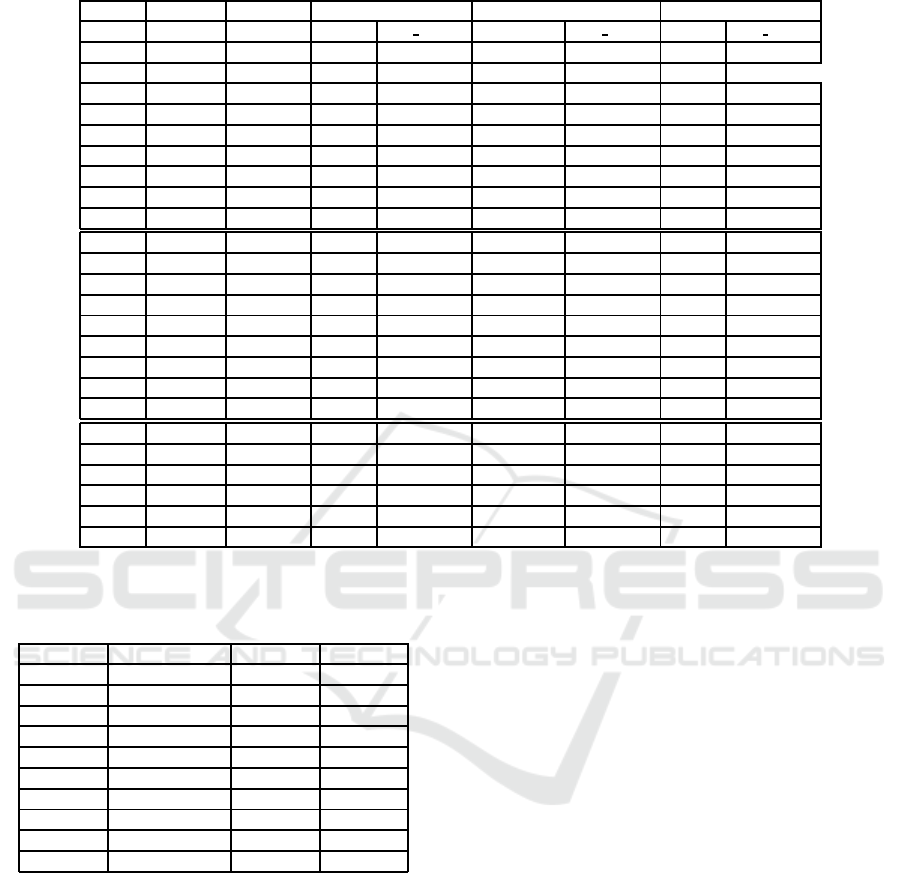
Table 3: Positionning HBSOGD1 and HBSOGD2 versus HBSO-MAXSAT: results obtained on the DIMACS instances.
Class Instances (n,m) HBSO-MAXSAT HBSOGD1 HBSOGD2
SR (%) Best SR (%) SR (%) Best SR (%) SR (%) Best SR (%)
1-6yes1-1 (50,80) 92,39 97,75 96,06 98,75 96,01 98,75
1-6yes1-2 (50,80) 93,12 97,5 96,14, 98,75 96,4 98,75
1-6yes1-3 (50,80) 90,27 93,75 94,31 97,5 93,99 96,25
aim50 1-6yes1-4 (50,80) 90,01 93,75 93,77 96,25 93,89 96,25
2-0yes1-1 (50,100) 91,96 95 96,07 98 96,06 98
2-0yes1-2 (50,100) 90,53 95 94,53 97 94,17 97
2-0yes1-3 (50,100) 92,13 97 95,86 98 96,05 99
2-0yes1-4 (50,100) 90,39 95 94,53 97 94,51 97
Average 91,35 95,59 95,16 97,66 95,13 97,62
1-6yes1-1 (100,160) 90,93 95 94,53 97 94,51 97
1-6yes1-2 (100,160) 91,96 96,25 95,66 97,5 95,76 98,12
1-6yes1-3 (100,160) 92,91 96,25 96,39 98,75 96,49 98,12
aim100 1-6yes1-4 (100,160) 92,37 96,25 96,48 98,75 96,41 98,75
2-0yes1-1 (100,200) 90,65 94 95,08 97 95,21 96,5
2-0yes1-2 (100,200) 90,34 93,5 94,64 96,5 94,65 96,5
2-0yes1-3 (100,200) 91,33 94 94,5 97,5 96,93 98
2-0yes1-4 (100,200) 92,06 95 95,91 97,5 95,99 98
Average 91,74 95,25 95,67 97,56 95,80 97,62
1 (350,1149) 55,51 60,57 72,55 74,32 72,52 74,32
2 (350,1157) 56,23 61,8 73,2 74,93 73,22 74,5
Parity8 3 (350,1171) 55 59,78 72,16 74,04 72,16 73,7
4 (350,1155) 54,18 58,78 71,26 72,81 71,26 72,81
5 (350,1171) 54,86 59,95 72,04 73,53 72 74,29
Average 55,16 60,18 72,42 73,93 72,23 73,92
Table 4: Positionning HBSOGD1 and HBSOGD2 ver-
sus HBSO-MAXSAT: results obtained on the Uniform
Random-3-SAT instances.
Instances HBSO-MAXSAT HBSOGD1 HBSOGD2
uf20-91 80,79 88,94 92,13
uf50-218 79,35 90,33 93,52
uf75-325 81,13 90,84 94,22
uf100-430 80,40 90,43 90,43
uf125-538 79,64 89,42 92,65
uf150-645 80,68 89,51 90,25
uf175-763 80,89 89,47 90,31
uf200-860 80,57 89,72 92,32
uf225-960 80,33 89,54 90,24
uf250-1065 80,48 89,47 93,26
5 CONCLUSION
In this paper, two extended Bees Swarm Optimiza-
tion algorithms guided by decomposition namely
BSOGD1 and BSOGD2 where proposed for address-
ing the maximal satisfiability problem. The Kmeans
procedure has been chosen for the decomposition
step. In BSOGD1, each bee of the colony consid-
ers as its region only a part of the problem, which
corresponds to a particular cluster. The bee returns
a partial modification of the reference solution be-
cause it can access the variables in only one cluster.
A bee in BSOGD2 can access to all the clusters. To
demonstrate the performance of the two approaches,
two main series of experimentation have been carried
out. First, the results on the DIMACS instances indi-
cate that the two approaches outperform the classical
BSO algorithm. Then, the results obtained on the hard
instances of Uniform-Random-3-SAT reveal that the
second approach benefits from the best exploration of
the decomposition and improves the results obtained
by the first approach. As a short term perspective, we
plan to investigate other metaheuristics to analyze in a
deeper way the effect of a decomposition on the max-
imal satisfiability problem. We also plan to apply the
two proposed approaches to other optimization prob-
lems like the Weighted MAXSAT, the coloring Prob-
lem, and Constraint Satisfaction Problems.
REFERENCES
Davis, M., Logemann, G., and Loveland, D. (1960). A com-
puting procedure for quantification theory. In Journal
of the Association for Computing Machinery.
Drias, H., Sadeg, S., and Yahi, S. (2005). Cooperative bees
swarm for solving the maximum weighted satisfiabil-
ity. In Proceeding of IWANN. SpringerVerlag.
Dubois, O., Andre, P., Y., B., and J., C. (1996). Sat versus
unsat. In Second Dimacs inplementation challenge,
ICAART 2016 - 8th International Conference on Agents and Artificial Intelligence
478

cliques, colouring and satisfiability, Dimacs Series in
discrete Mathematics and Theoretical Computer Sci-
ences.
Lardeau, F., Saubion, F., and Hao, J. K. (2006). A comput-
ing procedure for quantification theory. In Journal of
the ACM (JACM). ACM.
Li, C. (1997). Heuristics based on unit propagation for sat-
isfiability problems. In Proceeding of the IJCAI.
Selman, B., Kautz, H., and Cohen, B. (1994). Noise strate-
gies for improving local search. In In proc of the
AAAI’94.
Bees Swarm Optimization Metaheuristic Guided by Decomposition for Solving MAX-SAT
479
