
Shortest Path Routing in Transportation Networks
with Time-dependent Road Speeds
Costas K. Constantinou
1
, Georgios Ellinas
1,2
, Christos Panayiotou
1,2
and Marios Polycarpou
1,2
1
KIOS Research Center for Intelligent Systems and Networks, University of Cyprus, 1678 Nicosia, Cyprus
2
Department of Electrical and Computer Engineering, University of Cyprus, 1678 Nicosia, Cyprus
Keywords:
Shortest Path Routing, Time-dependent Transportation Networks.
Abstract:
This paper deals with the subject of shortest (in terms of traveling time) path routing in transportation networks,
where the speed in the network’s roads is a function of the time interval. These networks are encountered in
practice when the roads’ speed has been measured for several time instants during a large period of time (e.g.,
an entire year). In this way, time-dependent speed patterns can be derived for the network’s roads, that consti-
tute an estimation of the network’s future behavior. For shortest path routing in these networks, the traveling
time on the network’s roads must be calculated according to the time instant of departure. Conventional ap-
proaches perform this calculation under the assumption that the road’s speed has a constant (possibly distinct)
value inside each time interval. In the work presented here, the assumption that the road’s speed is linear (pos-
sibly distinct) function of time inside each time interval, is considered. Under this assumption, a procedure is
proposed that derives the traveling time on the network’s roads according to the time instant of departure. It
is combined with Dijkstra’s algorithm, resulting in a practically applicable algorithm for optimal shortest path
routing for the type of networks investigated in this work.
1 INTRODUCTION
The current paper deals with the subject of short-
est path routing in time-dependent transportation net-
works, where the term “shortest path” refers to the
path with the minimum traveling time. The time-
dependent characteristic of the network is the road’s
speed, which is a function of the time interval. This is
a category of networks that is encountered in practice
when the speed on the network’s roads has been mea-
sured for certain time instants (either directly mea-
sured, or derived from vehicle density measurements
(May, 1990)), during a large time interval (e.g., an en-
tire year). In this way, time-dependent speed patterns
can be derived for the network’s roads, that constitute
an estimation of the network’s future behavior.
For shortest path routing in these networks, the
traveling time on a network’s road depends on the
time instant of departure from the origin of the road,
and must be calculated during the derivation of the
shortest path. Conventional approaches perform this
calculation under the assumption that the road’s speed
has a constant (possibly distinct) value inside each
time interval. However, this assumption leads to a dis-
continuous function of speed over time, and it is not
in accordance with practical scenarios, as described
in more detail in Section 2. In the work presented
here, the assumption that the road’s speed is a lin-
ear (possibly distinct) function of time inside each
time interval, is considered. Such a function over-
comes the aforementioned drawbacks of the conven-
tional approaches. The main contribution of the cur-
rent paper is a procedure that derives the traveling
time on a network’s road according to the time instant
of departure from the origin of the road, under the
aforementioned linearity assumption. The proposed
procedure is combined with Dijkstra’s algorithm, re-
sulting to a practically applicable algorithm for op-
timal shortest path routing for the type of networks
under investigation.
The proposed work can be easily utilized in navi-
gation systems for the derivation of the fastest routes,
considering that the network will demonstrate the
same behavior in the future, as the one estimated
by the speed measurements. Note that the proposed
work refers to optimal routing, for the networks un-
der investigation; therefore, numerical examples are
not presented.
The outline of the remaining paper is as follows.
In Section 2 the assumptions for this work are pre-
Constantinou, C., Ellinas, G., Panayiotou, C. and Polycarpou, M.
Shortest Path Routing in Transportation Networks with Time-Dependent Road Speeds.
In Proceedings of the International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2016), pages 91-98
ISBN: 978-989-758-185-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
91

sented and their validity examined under realistic sce-
narios. The modeling of the networks under inves-
tigation is also presented, as well as the relevant ex-
isting approach for optimal shortest path routing in
these types of networks. Further, the drawbacks of
this approach are described; these constitute the mo-
tivation for the work proposed in the paper. Section
3 describes alternative existing approaches to model
a time-dependent network, and it is described why
these approaches are not suitable for the networks in-
vestigated in this paper. The contribution of the paper
can be found in Sections 4 and 5. Specifically, in Sec-
tion 4, the case of the road’s speed being a linear func-
tion of time inside each time interval is investigated.
A procedure is proposed that derives the time needed
to traverse a network’s road according to the time in-
stant of departure, under the aforementioned assump-
tion. This procedure is then combined with Dijkstra’s
algorithm for optimal shortest path routing in the in-
vestigated networks. In addition, in Section 5, it is
proven that the model utilized in this paper satisfies
the First-In-First-Out (FIFO) property for the general
case of the road’s speed being an arbitrary function of
time inside each time interval. Finally, in Section 6
the conclusions for this work are presented, as well as
ongoing research.
2 UTILIZED MODEL
Throughout the paper it is considered that the speed
in the network’s roads has been measured for cer-
tain time instants (either directly measured or derived
from vehicle density measurements (May, 1990)),
during a large period of time (e.g., an entire year).
In this way, time-dependent speed patterns can be de-
rived for the network’s roads, that constitute an esti-
mation of the network’s future behavior. More pre-
cisely, it is assumed that the network in the future
demonstrates the same behavior (except for unpre-
dictable events) as the one observed during the period
of time where the roads’ speed has been measured.
The network is modeled as a directed graph con-
sisting of a set of N (n = |N|) nodes (i.e., road junc-
tions) and a set of A (m = |A|) arcs (i.e., roads). The
arc originating from node x and ending at node y is
denoted by < xy > and its length (i.e., actual length
of the corresponding road) by d
xy
. The speed in arc
< xy > is denoted by v
xy
. A node y is considered to
be adjacent to node x if arc < xy > exists in the graph.
The cost c
xy
(or “traversal time” or “traveling time”)
of arc < xy > is defined as the time needed to traverse
it, i.e., to move from node x to node y. Consequently,
the term “shortest path” from node a to node b refers
to the minimum traveling time path from a to b.
For the case of time-independent networks, the
cost of an arc < xy > is constant over time, equal to
d
xy
/v
xy
. For time-dependent networks, it is a func-
tion of the time instant of departure, τ, from node
x, and it is denoted by c
xy
(τ). Therefore, for short-
est path routing in time-dependent networks an ad-
ditional calculation must be performed, compared to
time-independent networks; that is, the calculation of
c
xy
(τ) according to the time instant of departure from
node x. At this point, it must be stated that the time in-
stant of departure τ is permitted to have any real value,
rather than being a discrete-value variable. This is in
accordance with practical scenarios.
Consider that the speed in a certain arc (i.e., road)
is measured at several time instants, τ
k
, with k ∈ N
and 0 ≤ k ≤ K; the notation v
xy
(τ
k
) = v
xy
k
stands for
the measurement of speed at time instant τ
k
. Then, for
arc < xy > the time horizon is partitioned into (in gen-
eral not equal) non-overlapped time intervals, where
the partitioning points are the time instants where the
speed has been measured. The (k + 1)
th
time interval
is denoted by [τ
xy
k
,τ
xy
k+1
). According to the aforemen-
tioned notation, the number of time intervals is equal
to K + 1.
Let the set of speeds v
xy
k
and time intervals
[τ
xy
k
,τ
xy
k+1
), 0 ≤ k ≤ K, for arc < xy > be denoted by
V
xy
and T
xy
respectively. Consider also that
V =
S
∀<xy>∈A
V
xy
(1)
T =
S
∀<xy>∈A
T
xy
(2)
Then, the network graph is denoted by G =
(N,A,T,V ).
This modeling of the time-dependent network was
proposed in (Sung et al., 2000), and it is called Flow
Speed Model (FSM). One aspect of this modeling of
a time-dependent network that is not described yet, is
the value of an arc’s speed for time instants where the
speed has not been measured. In (Sung et al., 2000),
it is assumed that the speed is constant inside each
time interval, equal to the value measured at the left
bound of the time interval. More precisely, as de-
scribed previously, the arbitrary time interval of arc
< xy > (denoted by [τ
xy
k
,τ
xy
k+1
)) was determined based
on the fact that the speed has been measured at time
instants τ
xy
k
and τ
xy
k+1
. Therefore, in (Sung et al., 2000)
it is considered that the speed in arc < xy > is equal
to v
xy
k
for all time instants τ such that τ
xy
k
≤ τ < τ
xy
k+1
.
In other words, it is considered that for time instant
τ = τ
xy
k+1
−ε, where ε is a positive, arbitrarily small
constant, the speed in < xy > is equal to v
xy
k
(i.e., equal
to the one measured at time instant τ
xy
k
), whereas for
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
92

time instant τ = τ
xy
k+1
the speed in < xy > is equal to
v
xy
k+1
(i.e., equal to the one measured at time instant
τ
xy
k+1
). This assumption has the following potential
drawbacks:
i) It leads to a discontinuous function of speed
over time, since
lim
ε→0
{v
xy
(τ
xy
k+1
−ε)} 6= v
xy
(τ
xy
k+1
) (3)
(Note that in equation 3 the expression v
xy
(τ
xy
k+1
−
ε), as stated previously, refers to the speed at time
instant τ
xy
k+1
−ε, i.e., it does not denote the multipli-
cation of v
xy
with the latter.)
ii) It is not in accordance with practical scenarios,
since for time instants τ very close to τ
xy
k+1
, this as-
sumption still gives a speed value equal to v
xy
k
, rather
than a value close to v
xy
k+1
.
The work presented in the current paper is based
on the assumption that the speed inside a time inter-
val must be considered as a linear function of time,
where this function must lead to speed values equal to
v
xy
k
, v
xy
k+1
for time instants τ
xy
k
, τ
xy
k+1
respectively. Such
a function would overcome the aforementioned draw-
backs of the conventional approach. This is exactly
the contribution of the current paper, presented in de-
tail in Section 4.
Another characteristic of the FSM that must be
stated, is that it always satisfies the First-In-First-Out
(FIFO) property, as proven in (Sung et al., 2000). In
simple words, the FIFO property has the following
meaning: Consider a vehicle A that can depart from
node x and traverse arc < xy >, having two possible
time instants of departure, τ
1
and τ
2
, with τ
1
< τ
2
,
and let τ
0
1
and τ
0
2
be the corresponding time instants
of arrival at node y. Then, if the FIFO property is
valid, τ
0
1
< τ
0
2
(the traveling time τ
0
2
−τ
2
, though, may
be smaller than traveling time τ
0
1
−τ
1
). The reader
should note that this property is necessary for a model
in order for it to objectively represent real networks,
since the scenario of departing later and arriving ear-
lier deviates from reality. Section 5 addresses pre-
cisely this point, proving that the model utilized in
this paper satisfies the First-In-First-Out (FIFO) prop-
erty for the general case of the road’s speed being an
arbitrary function of time inside each time interval.
As stated previously, for shortest path routing
in time-dependent networks an additional calculation
must be performed compared to time-independent
networks, that is the calculation of c
xy
(τ), i.e., the
traversal time on arc < xy > according to the time
instant of departure, τ, from node x. In the FSM, this
is performed as described below.
2.1 AT T Procedure
In the FSM, the traversal time c
xy
(τ) on arc < xy >,
if τ is the time instant of departure from x, is derived
using the following procedure, called Arc Traversal
Time Procedure (AT T
xy
(τ), or simply AT T ). This
procedure has been proposed in (Sung et al., 2000) (in
this paper it is presented in an equivalent, slightly dif-
ferent way). The reader should note that in the steps
of the AT T , as well as in the succeeding illustrative
example, for simplicity index ∗
xy
is omitted from the
relevant variables.
Steps of ATT Procedure
1. Locate index k such that τ
k
≤ τ < τ
k+1
;
2. If (v
k
·(τ
k+1
−τ) ≥ d)
c(τ) =
d
v
k
;
Else
{
3.(a)i. a = d −v
k
·(τ
k+1
−τ);
ii. k
∗
= k + 1;
(b) While (v
k
∗
·(τ
k
∗
+1
−τ
k
∗
) < a)
{
i. a ← a −v
k
∗
·(τ
k
∗
+1
−τ
k
∗
);
ii. k
∗
← k
∗
+ 1;
}
4. c(τ) = (τ
k
∗
−τ) +
a
v
k
∗
;
}
The necessity of the aforementioned procedure
lies on the fact that a single time interval may not be
enough for the traversal of the whole arc. This occurs
when the distance that can be traversed from the time
instant of departure till the end of the corresponding
time interval is less than the length of the arc.
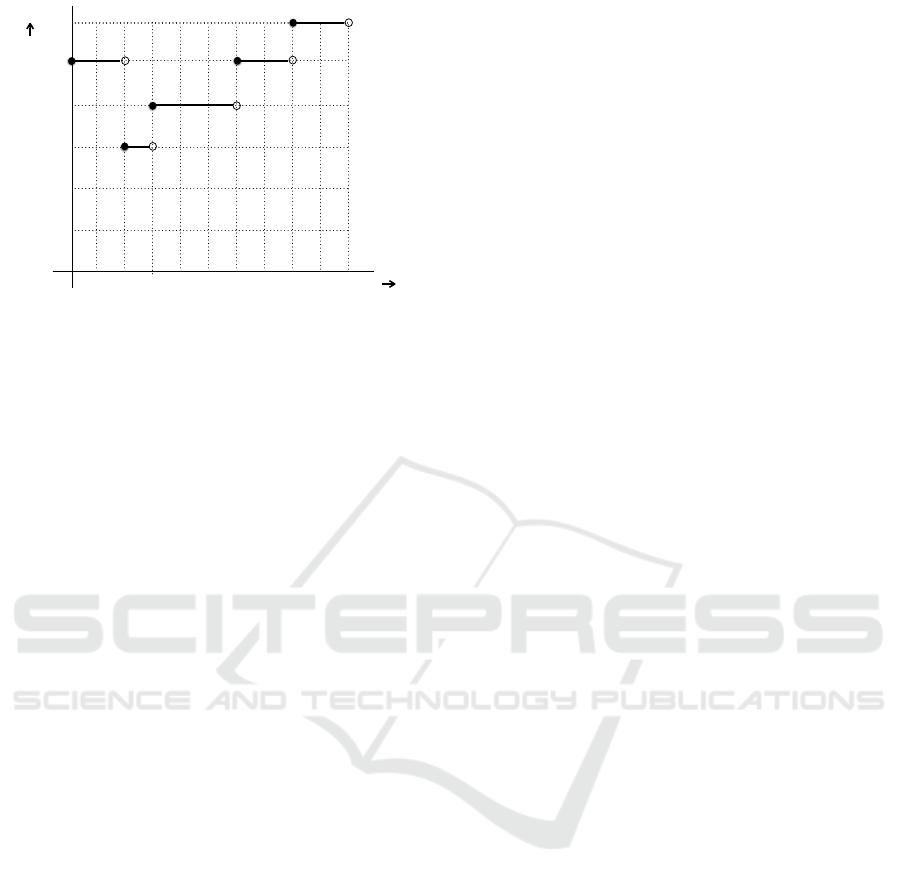
Example of ATT
The example of Figure 1 illustrates the operation
of the AT T procedure. Here, the length d of arc
< xy > is equal to 170m and the departure time τ
from x is equal to 6s. The first five time intervals
are [τ
0
,τ
1
) = [0,10), [τ
1
,τ
2
) = [10,15), [τ
2
,τ
3
) =
[15,30), [τ
3
,τ
4
) = [30,40), [τ
4
,τ
5
) = [40,50). These
time intervals, along with their corresponding speeds,
are shown in Figure 1.
For this example, the AT T procedure performs as
follows:
1. The departure time τ = 6s lies in time interval
[τ
0
,τ
1
) = [0, 10) ⇒ k = 0
Shortest Path Routing in Transportation Networks with Time-Dependent Road Speeds
93
8
6
2
4
10
12
0
0
5 10 15 20 25 30 35 40 45
v
m/s
t50 s
Figure 1: Example for the derivation of arc traversal time
(d = 170m, τ = 6s).
2. The distance that can be traversed from τ = 6s
until the end of this time interval is equal to
v
0
·(τ
1
−τ) = 10 ·(10 −6) = 40m. Since it is
smaller than the length of the arc, the procedure
continues.
3.(a)i. a = d −v
0
·(τ
1
−τ) = 170 −40 = 130m
ii. k
∗
= 1
(b)• v
1
· (τ
2
− τ
1
) = 6 · (15 −10) = 30m < a =
130m ⇒
i. a = 130 −30 = 100m
ii. k
∗
= 2
• v
2
·(τ
3
−τ
2
) = 8 · (30 − 15) = 120m > a =
100m ⇒ exit from the while loop
4. c(6) = (τ
2
−τ) + a/v
2
= (15 −6) + 100/8 = 9 +
12.5 = 21.5s
The traversal time is equal to 21.5s and the time
instant of arrival at node y is equal to 6+21.5 = 27.5s.
Complexity of ATT
Step 1 of the AT T procedure needs O(K) time, if the
time intervals are checked sequentially. The order of
the number of the time intervals that are checked dur-
ing the while loop (step 3b) is O(K). Therefore, the
order of the computational complexity of the ATT
procedure is O(K).
In (Sung et al., 2000), the ATT procedure is com-
bined with Dijkstra’s algorithm (Dijkstra, 1959), and
the resulting algorithm can provide optimal short-
est path routing for the networks under investiga-
tion. For completeness, this algorithm is presented
in the succeeding section. Hereafter, it is called Time-
Dependent-Dijkstra (TD-Dijkstra).
2.2 TD-Dijkstra
The input of TD-Dijkstra is the network graph G =
(N,A,T,V ), the source node s, and the time instant of
departure τ, from the source. The output is the short-
est path from the source to every other network node.
For the execution of TD-Dijkstra, the following are
used.
• G = (N,A,T,V ): Network graph
• s: Source
• τ: Time instant of departure from s
• W (x): Label of node x
• p(x): Predecessor of node x
• G
x
: Set of nodes adjacent to node x
• g
x
: Number of nodes adjacent to node x
(i.e., g
x
= |G
x
|)
The exact steps of TD-Dijkstra are:
1.(a) W (s) = τ;
(b) p(s) = 0;
(c) N
∗
= N −{s};
(d) ∀x ∈N
∗
:
i. If (x ∈G
s
)
{
Run AT T
sx
(τ);
W (x) = τ + c
sx
(τ);
p(x) = s ;
}
ii. Else
{
W (x) = ∞;
p(x) = 0;
}
2. While (N
∗
6=
/
0)
{
(a) Find x ∈ N
∗
such that ∀x
0
∈N
∗
: W (x) ≤W (x
0
);
(b) N
∗
← N
∗
−{x};
(c) ∀x
0
∈ (N
∗
∩G
x
):
i. Run AT T
xx
0
(W (x));
ii. If (W (x) + c
xx
0
(W (x)) < W (x
0
))
{
W (x
0
) = W (x) + c
xx
0
(W (x));
p(x
0
) = x;
}
}
The TD-Dijkstra algorithm functions as the clas-
sical Dijkstra’s algorithm, with the difference that the
AT T procedure is used in steps 1(d)i and 2(c)i for the
derivation of the cost of the arbitrary arc < xy >, ac-
cording to the time instant of departure from node x.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
94

On termination of the algorithm, the label W(x) of
the arbitrary node x gives the time instant of arrival
at x. Therefore, the cost of the shortest path from the
source s to node x is equal to W(x) −τ. The variable
p(x) gives the predecessor of x in this path.
Since the computational complexity of the ATT
procedure is of order O(K), step 1 requires O(g
s
K +
n) time and each iteration of step 2 requires O(n +
g
x
K) time. Since the number of repetitions of step
2 is of order O(n), and
∑
n
x=1
g
x
= m, the complexity
of TD-Dijkstra is of order O(g
s
K + n + n
2
+ mK) =
O(n
2
+ mK). The reader should note that although
the aforementioned, simple implementation is pre-
sented in (Sung et al., 2000) where this algorithm was
proposed, a faster implementation can be performed
if Fibonacci heaps are utilized (Fredman and Tarjan,
1987), (Ahuja et al., 1993). Under this data structure,
the computational complexity of TD-Dijkstra would
be of order O(nlogn + mK).
In the section that follows, existing alternative ap-
proaches to model a time-dependent transportation
network are presented, and it is explained why they
are unsuitable for optimal shortest path routing in the
networks under investigation.
3 ALTERNATIVE APPROACHES
Alternative existing approaches to model a time-
dependent network can be found, among others, in
(Cooke and Halsey, 1966), (Delling, 2011), (Nan-
nicini et al., 2012), (Delling and Nannicini, 2012),
(Delling et al., 2009), (Delling and Wagner, 2009),
(Ding et al., 2008), (Batz et al., 2013), (Chabini and
Lan, 2002), and (Chabini, 1998). All the aforemen-
tioned papers assume that for each network’s arc <
xy >, the traversal time is available for certain time
instants of departure from node x. Let this arc traver-
sal time, which is a function of the time instant of
departure, be called as traversal time function and be
denoted by f
xy
(τ), for the arbitrary arc < xy > and for
τ as the time instant of departure. In the aforemen-
tioned papers, the traversal time function is assumed
to be known for some values of τ and these values are
utilized for the derivation of the arc traversal time for
an arbitrary time instant of departure.
However, as stated previously, in the networks in-
vestigated in the current paper, it is (realistically) as-
sumed that the time instant of departure may have
any arbitrary value. Therefore, the work presented in
(Chabini and Lan, 2002), (Chabini, 1998), which is
concentrated on discrete-time networks, cannot lead
to optimal shortest path routing in the investigated
networks. Furthermore, in the networks under investi-
gation, the traversal time function is not directly avail-
able, since, as described previously, the speed rather
than the arc traversal time, has been measured. Con-
sequently, the work found in the rest of the aforemen-
tioned papers (which are concentrated on continuous-
time networks) cannot be directly applied for optimal
shortest path routing in the networks under investiga-
tion.
Consider the case where the traversal time func-
tion is derived from the available data (i.e., the speed
measurements) for certain time instants (e.g., for the
time instants that the speed has been measured). This
would be a preprocessing step, performed using the
AT T procedure. Even under this scenario, the work
found in these papers would not lead to optimal short-
est path routing in the investigated networks. The rea-
son is that in all these works, it is assumed that the
traversal time function is a piecewise linear function
of time, having the time instants where it is known,
as breakpoints. Under this assumption, for a time
instant τ for which f
xy
(τ) is unknown, it can be de-
rived by linear interpolation between the consecutive
breakpoints τ
k
, τ
k+1
such that τ
k
< τ < τ
k+1
, using
the known values f
xy
(τ
k
) and f
xy
(τ
k+1
), as shown in
equation 5 below.
f
xy
(τ)−f
xy
(τ
k
)
τ−τ
k
=
f
xy
(τ
k+1
)−f
xy
(τ
k
)
τ
k+1
−τ
k
(4)
⇒ f
xy
(τ) =
f
xy
(τ
k+1
)−f
xy
(τ
k
)
τ
k+1
−τ
k
·(τ −τ
k
) + f
xy
(τ
k
) (5)
In the networks investigated in the current paper,
though, the assumption that the traversal time func-
tion is a piecewise linear function of time, is, in gen-
eral, not valid. This can be proven theoretically; it
is not presented here, since it deviates from the pur-
pose of the current paper. Nevertheless, this can be
easily verified from the example of Figure 1. Here, if
the arc traversal time is derived for the time instants
that the speed has been measured (this must be per-
formed using the AT T procedure), then the derived
traversal time function f
xy
(τ) for time instants equal
to 0s, 10s is equal to 20s, 22s, respectively. Using
equation 5, f
xy
(6) = 21.2s, i.e., the assumption that
f
xy
(τ) is piecewise linear function of time, leads to
arc traversal time equal to 21,2s, for τ = 6s as the
time instant of departure. However, the correct value
is equal to 21.5s, as derived in Section 2. Therefore,
using this example, it is shown that this assumption,
in general, is not valid.
Thus, according to the aforementioned analy-
sis, the alternative approaches for modeling a time-
dependent network cannot be applied for optimal
shortest path routing in the networks under investi-
gation, since for these networks they give suboptimal
solutions. Further analysis of the advantages of the
Shortest Path Routing in Transportation Networks with Time-Dependent Road Speeds
95

FSM model, compared to other approaches, can also
be found in (Sung et al., 2000), where this model was
proposed.
In the section that follows, the proposed model
is presented, along with the corresponding procedure
that derives the traveling time on the network’s roads
according to the time instant of departure.
4 SPEED AS LINEAR FUNCTION
OF TIME, INSIDE THE TIME
INTERVAL
As stated previously, the conventional approach
(Sung et al., 2000) assumes that the speed is consid-
ered to have constant value inside each time interval.
In this section, the case of speed being a linear func-
tion of time inside each time interval, is proposed. The
reader should note that the linearity here refers to the
function of speed over time, inside each time interval;
it must not be confused with the linearity of the traver-
sal time function that was described in Section 3.
The proposed approach overcomes the drawbacks
of the conventional one, since it leads to a continuous
function of speed over time, i.e.,
lim
ε→0
{v
xy
(τ
xy
k+1
−ε)} = v
xy
(τ
xy
k+1
) (6)
It is in accordance with practical scenarios as well,
since for time instants τ very close to τ
xy
k+1
, this ap-
proach leads to a speed value close to v
xy
k+1
.
Let this linear function of speed be denoted by
g
xy
k
(t) for arc < xy > and for time instant of depar-
ture t belonging to time interval [τ
k
,τ
k+1
), and let
G
xy
k
(t
1
,t
2
) =
R
t
2
t
1
g
xy
k
(t)dt (with τ
k
≤ t
1
≤ t
2
≤ τ
k+1
).
The latter gives the value of the distance traversed on
arc < xy > from time instant t
1
to t
2
(as long as t
1
and
t
2
belong to the same time interval).
Consider that the speed has been measured at time
instants τ
k
and τ
k+1
with measured values equal to v
xy
k
and v
xy
k+1
respectively. Then, function g
xy
k
(t) is consid-
ered to be a linear function of time t inside the time
interval [τ
k
,τ
k+1
), taking the values g
xy
k
(τ
k
) = v
xy
k
and
g
xy
k
(τ
k+1
) = v
xy
k+1
at the bounds of this time interval.
As stated previously, in the conventional approach it
is assumed that this function is constant, equal to v
xy
k
for the entire time interval [τ
k
,τ
k+1
).
Since function g
xy
k
(t) is considered to be linear in-
side each time interval, the following hold (τ
k
≤ t <
τ
k+1
, and index ∗
xy
is omitted for simplicity):
g
k
(t)−v
k
t−τ
k
=
v
k+1
−v
k
τ
k+1
−τ
k
(7)
g
k
(t) −v
k
=
v
k+1
−v
k
τ
k+1
−τ
k
·(t −τ
k
) (8)
g
k
(t) =
v
k+1
−v
k
τ
k+1
−τ
k
t + (v
k
−
v
k+1
−v
k
τ
k+1
−τ
k
τ
k
) (9)
g
k
(t) =
v
k+1
−v
k
τ
k+1
−τ
k
t +
v
k
τ
k+1
−v
k+1
τ
k
τ
k+1
−τ
k
(10)
G
k
(t
1
,t
2
) = (
v
k+1
−v
k
τ
k+1
−τ
k
t
2
2
2
+
v
k
τ
k+1
−v
k+1
τ
k
τ
k+1
−τ
k
t
2
)−
−(
v
k+1
−v
k
τ
k+1
−τ
k
t
1
2
2
+
v
k
τ
k+1
−v
k+1
τ
k
τ
k+1
−τ
k
t
1
) (11)
G
k
(t
1
,t
2
) =
v
k+1
−v
k
τ
k+1
−τ
k
t
2
2
−t
1
2
2
+
v
k
τ
k+1
−v
k+1
τ
k
τ
k+1
−τ
k
(t
2
−t
1
) (12)
G
k
(t
1
,t
2
) = R
k
t
2
2
−t
1
2
2
+ S
k
(t
2
−t
1
) (13)
where equation 13 is derived if we set:
v
k+1
−v
k
τ
k+1
−τ
k
= R
k
(14)
v
k
τ
k+1
−v
k+1
τ
k
τ
k+1
−τ
k
= S
k
(15)
Let the ATT procedure under the linearity as-
sumption be denoted as Linear AT T (ATT
L
). Then,
the proposed AT T
L
is derived from the existing AT T
as follows.
• Step 1 remains the same as in AT T .
• In step 2 of the AT T , v
k
·(τ
k+1
−τ) is equal to the
distance traversed from τ to τ
k+1
. This distance in
AT T
L
is given by
G
k
(τ,τ
k+1
) = R
k
τ
k+1
2
−τ
2
2
+ S
k
(τ
k+1
−τ) (16)
– If this distance is equal to or larger than d (i.e.,
if G
k
(τ,τ
k+1
) ≥ d), then the traversal time c(τ)
is given by the solution of equation 17, as fol-
lows.
G
k
(τ,τ + c(τ)) = d (17)
R
k
(τ+c(τ))
2
−τ
2
2
+ S
k
(τ + c(τ) −τ) = d (18)
R
k
((τ + c(τ))
2
−τ
2
) + 2S
k
(τ + c(τ) −τ) =
= 2d (19)
R
k
(c(τ)
2
+ 2τc(τ)) + 2S
k
c(τ) = 2d (20)
R
k
c(τ)
2
+ 2(R
k
τ + S
k
)c(τ) −2d = 0 (21)
c(τ) =
−2(R
k
τ+S
k
)±
√
4(R
k
τ+S
k
)
2
+8R
k
d
2R
k
(22)
c(τ) =
−(R
k
τ+S
k
)±
√
(R
k
τ+S
k
)
2
+2R
k
d
R
k
(23)
– If this distance is less than d (i.e., if
G
k
(τ,τ
k+1
) < d), the procedure continues to
step 3.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
96

• In step 3(a)i, a is set to d −G
k
(τ,τ
k+1
). Step3(a)ii
remains the same.
• In step 3(b), the statement in the while loop would
be G
k
∗
(τ
k
∗
,τ
k
∗
+1
) < a; every time this is valid, a
takes the value a−G
k
∗
(τ
k
∗
,τ
k
∗
+1
), and k
∗
←k
∗
+
1.
• When the procedure exits from the while loop, the
value of the arrival time, τ
0
, will lie in time in-
terval [τ
k
∗
,τ
k
∗
+1
). let c
0
(τ) = τ
0
−τ
k
∗
; this is the
time needed to traverse the last part of the arc, i.e.,
while time interval [τ
k
∗
,τ
k
∗
+1
) is under consider-
ation. Therefore, the arc traversal time will be
equal to (τ
k
∗
−τ) + c
0
(τ). The value of c
0
(τ) is
derived as follows.
G
k
∗
(τ
k
∗
,τ
0
) = a (24)
G
k
∗
(τ
k
∗
,τ
k
∗
+ c
0
(τ)) = a (25)
R
k
∗
(τ
k
∗
+c
0
(τ))
2
−τ
k
∗
2
2
+
+S
k
(τ
k
∗
+ c
0
(τ) −τ
k
∗
) = a (26)
R
k
∗
((τ
k
∗
+ c
0
(τ
k
∗
))
2
−τ
k
∗
2
)+
+2S
k
∗
(τ
k
∗
+ c
0
(τ) −τ
k
∗
) = 2a (27)
R
k
∗
(c
0
(τ)
2
+ 2τ
k
∗
c
0
(τ)) + 2S
k
∗
c
0
(τ) = 2a (28)
R
k
∗
c
0
(τ)
2
+ 2(R
k
∗
τ
k
∗
+ S
k
∗
)c
0
(τ) −2a = 0(29)
c
0
(τ) =
=
−2(R
k
∗
τ
k
∗
+S
k
∗
)±
√
4(R
k
∗
τ
k
∗
+S
k
∗
)
2
+8R
k
∗
a
2R
k
∗
(30)
c
0
(τ) =
=
−(R
k
∗
τ
k
∗
+S
k
∗
)±
√
(R
k
∗
τ
k
∗
+S
k
∗
)
2
+2R
k
∗
a
R
k
∗
(31)
Equation 31 is used in step 4 of the ATT
L
, for the
derivation of the arc traversal time after the proce-
dure exits from the while loop of step 3, i.e.,
c(τ) = τ
0
−τ (32)
c(τ) = (τ
k
∗
+ c
0
(τ)) −τ (33)
c(τ) = (τ
k
∗
−τ)+
+
−(R
k
∗
τ
k
∗
+S
k
∗
)±
√
(R
k
∗
τ
k
∗
+S
k
∗
)
2
+2R
k
∗
a
R
k
∗
(34)
Considering the analysis above, the exact steps of
the proposed AT T
L
procedure are as follows.
Steps of AT T
L
Procedure
1. Locate index k such that τ
k
≤ τ < τ
k+1
;
2. If (G
k
(τ,τ
k+1
) ≥ d)
c(τ) =
−(R
k
τ+S
k
)±
√
(R
k
τ+S
k
)
2
+2R
k
d
R
k
;
Else
{
3.(a)i. a = d −G
k
(τ,τ
k+1
);
ii. k
∗
= k + 1;
(b) While (G
k
∗
(τ
k
∗
,τ
k
∗
+1
) < a)
{
i. a ← a −G
k
∗
(τ
k
∗
,τ
k
∗
+1
);
ii. k
∗
← k
∗
+ 1;
}
4.
c(τ) = (τ
k
∗
−τ)+
+
−(R
k
∗
τ
k
∗
+S
k
∗
)±
√
(R
k
∗
τ
k
∗
+S
k
∗
)
2
+2R
k
∗
a
R
k
∗
;
}
The computational complexity of the proposed
AT T
L
procedure is O(K) (i.e, the same as the one of
AT T ). The optimal shortest path routing for this case
can be performed by TD-Dijkstra, (Section 2.2) just
by substituting the ATT procedure with the AT T
L
pro-
cedure in the description of the algorithm.
In Section 3 it was shown that the alternative ap-
proaches give suboptimal solutions for the networks
investigated in the current paper, under the assump-
tion that the speed has constant value inside each time
interval. These approaches also give suboptimal so-
lutions for the investigated networks, under the as-
sumption that the speed is linear function of time in-
side each time interval. This can be verified using the
example of Figure 1, modified under the linearity as-
sumption.
5 FSM AND FIFO PROPERTY
FOR THE GENERALISED CASE
In (Sung et al., 2000), it was proven that the FSM
satisfies the FIFO property for the case of constant
speed inside each time interval. In this section, it is
proven that the FIFO property also holds for the gen-
eral case of the speed being an arbitrary function of
time (g
k
(τ)) inside the time interval. A direct conse-
quence of it is that the FSM satisfies the FIFO prop-
erty under the linearity assumption utilized in Sec-
tion 4.
Consider that for an arbitrary arc < xy >, two ve-
hicles 1, 2 depart from node x at time instants τ
1
, τ
2
respectively, with τ
2
> τ
1
, and arrive at node y at time
instants τ
0
1
, τ
0
2
respectively. Obviously, τ
0
1
> τ
1
and
τ
0
2
> τ
2
.
To prove that the FIFO property is valid, it must be
proven that τ
0
2
> τ
0
1
. The following cases are possible:
Shortest Path Routing in Transportation Networks with Time-Dependent Road Speeds
97

• τ
2
≥ τ
0
1
τ
0
2
>τ
2
===⇒ τ
0
2
> τ
0
1
• τ
1
< τ
2
< τ
0
1
. The distance d is traversed from
time instant τ
1
to τ
0
1
, and it can be split into dis-
tances a and b (a+b = d), where a is the distance
traversed from τ
1
to τ
2
and b is the distance tra-
versed from τ
2
to τ
0
1
. Then,
τ
2
> τ
1
⇒ a > 0 ⇒b < d (35)
From equation 35, it is concluded that the time
that elapses from τ
2
to τ
0
1
is not enough to traverse
the whole arc < xy >. Therefore, vehicle 2 that
departs from node x at time instant τ
2
will arrive
at node y at τ
0
2
> τ
0
1
.
6 CONCLUSIONS
This work focused on the subject of shortest (in terms
of traveling time) path routing in transportation net-
works, where the speed in the network’s roads is a
function of the time interval. A procedure was pro-
posed that derives the road’s traversal time in these
networks, according to the time instant of departure,
under the assumption that the road’s speed is a linear
(possibly distinct) function of time inside each time
interval. This procedure can then be combined with
Dijkstra’s algorithm to obtain optimal shortest paths
for the networks under investigation. Further, it was
also proven that the approach utilized in this work for
modeling the investigated networks satisfies the FIFO
property for the general case of the speed being an
arbitrary function of time inside each time interval.
The proposed approach is more practical and readily
addresses the limitations of the conventional existing
approaches that assume that the speed is constant in-
side each time interval.
On going work focuses on the combination of
the proposed procedure with algorithms that provide
practically fast optimal shortest path routing in time-
independent networks, so as to develop their time-
dependent versions that will lead to optimal solutions
for the networks under investigation.
ACKNOWLEDGMENTS
This work was supported by the Cyprus Research
Promotion Foundation’s Framework Programme for
Research, Technological Development and Innova-
tion 2008 (DESMI 2008), co-funded by the Republic
of Cyprus and the European Regional Development
Fund, and specifically under Grant Project New In-
frastructure/Strategic/0308/26.
REFERENCES
Ahuja, R. K., Magnanti, T. L., and Orlin, J. B. (1993). Net-
work Flows: Theory, Algorithms, and Applications.
Prentice-Hall, Inc., Upper Saddle River, NJ, USA.
Batz, G. V., Geisberger, R., Sanders, P., and Vetter,
C. (2013). Minimum time-dependent travel times
with contraction hierarchies. J. Exp. Algorithmics,
18:1.4:1.1–1.4:1.43.
Chabini, I. (1998). Discrete dynamic shortest path prob-
lems in transportation applications: Complexity and
algorithms with optimal run time. Transportation Re-
search Records, 1645:170–175.
Chabini, I. and Lan, S. (2002). Adaptations of the A* algo-
rithm for the computation of fastest paths in determin-
istic discrete-time dynamic networks. Trans. Intell.
Transport. Sys., 3(1):60–74.
Cooke, K. and Halsey, E. (1966). The shortest route
through a network with time-dependent internodal
transit times. Journal of Mathematical Analysis and
Applications, 14(3):493–498.
Delling, D. (2011). Time-dependent sharc-routing. Algo-
rithmica, 60(1):60–94.
Delling, D. and Nannicini, G. (2012). Core routing on dy-
namic time-dependent road networks. INFORMS J.
on Computing, 24(2):187–201.
Delling, D., Sanders, P., Schultes, D., and Wagner, D.
(2009). Algorithmics of large and complex net-
works. chapter Engineering Route Planning Algo-
rithms, pages 117–139. Springer-Verlag, Berlin, Hei-
delberg.
Delling, D. and Wagner, D. (2009). Time-dependent route
planning. In Ahuja, R., Mhring, R., and Zaroliagis, C.,
editors, Robust and Online Large-Scale Optimization,
volume 5868 of Lecture Notes in Computer Science,
pages 207–230. Springer Berlin Heidelberg.
Dijkstra, E. W. (1959). A note on two problems in connex-
ion with graphs. Numerische Mathematik, 1:269–271.
10.1007/BF01386390.
Ding, B., Yu, J. X., and Qin, L. (2008). Finding time-
dependent shortest paths over large graphs. In Pro-
ceedings of the 11th International Conference on Ex-
tending Database Technology: Advances in Database
Technology, EDBT ’08, pages 205–216, New York,
NY, USA. ACM.
Fredman, M. L. and Tarjan, R. E. (1987). Fibonacci heaps
and their uses in improved network optimization algo-
rithms. J. ACM, 34(3):596–615.
May, A. D. (1990). Traffic flow fundamentals. Prentice Hall.
Nannicini, G., Delling, D., Schultes, D., and Liberti, L.
(2012). Bidirectional A* search on time-dependent
road networks. Networks, 59(2):240–251.
Sung, K., Bell, M. G., Seong, M., and Park, S. (2000).
Shortest paths in a network with time-dependent flow
speeds. European Journal of Operational Research,
121(1):32–39.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
98
