
A Hadoop based Framework to Process Geo-distributed Big Data
Marco Cavallo, Lorenzo Cusma’, Giuseppe Di Modica, Carmelo Polito and Orazio Tomarchio
Department of Electrical, Electronic and Computer Engineering, University of Catania, Catania, Italy
Keywords:
Big Data, Mapreduce, Hierarchical Hadoop, Context Awareness, Integer Partitioning.
Abstract:
In many application fields such as social networks, e-commerce and content delivery networks there is a con-
stant production of big amounts of data in geographically distributed sites that need to be timely elaborated.
Distributed computing frameworks such as Hadoop (based on the MapReduce paradigm) have been used to
process big data by exploiting the computing power of many cluster nodes interconnected through high speed
links. Unfortunately, Hadoop was proved to perform very poorly in the just mentioned scenario. We de-
signed and developed a Hadoop framework that is capable of scheduling and distributing hadoop tasks among
geographically distant sites in a way that optimizes the overall job performance. We propose a hierarchi-
cal approach where a top-level entity, by exploiting the information concerning the data location, is capable
of producing a smart schedule of low-level, independent MapReduce sub-jobs. A software prototype of the
framework was developed. Tests run on the prototype showed that the job scheduler makes good forecasts of
the expected job’s execution time.
1 INTRODUCTION
Big data technologies have appeared in the last decade
to serve the growing need for computation in all the
fields where old data mining techniques did not suite
anymore because of the really big size of the data
to be analyzed. First problem to face when coming
across big data computation is where to put data. The
Cloud has been evoked by many as the right place
where data ought to be stored and mined (Wright and
Manieri, 2014). The Cloud can scale very well with
respect to both the data dimension and the computing
power that is required for elaboration purposes. Be-
cause of the huge data dimension, moving the com-
putation close to the data seems to be the most smart
and advisable strategy. Nevertheless, the assumption
that data are concentrated in just one place does not
always hold true. On the contrary, in many applica-
tions very frequently data are conveyed to data cen-
ters which are geographically distant to each other’s
(Petri et al., 2014).
Application parallelization and divide-and-
conquer strategies are natural computational
paradigms for approaching big data problems,
addressing scalability and high performance. The
availability of grid and cloud computing technolo-
gies, which have lowered the price of on-demand
computing power, have spread the usage of parallel
paradigms, such as the MapReduce (Dean and Ghe-
mawat, 2004), for big data processing. However, in
scenarios where data are distributed over physically
distant places the MapReduce technique may perform
very poorly. Hadoop, one of the most widespread
implementation of the MapReduce paradigm, was
mainly designed to work on clusters of homogeneous
computing nodes belonging to the same local area
network; thus, data locality is one of the crucial
factors affecting its performance. Tests run on a
geographic test-bed have proved that the time for
a Hadoop job to complete uncontrollably increases
because the shifts of data triggered by the algorithm
are penalized by the low speed geographic links.
This work discusses the design and implementa-
tion of a software system conceived to serve MapRe-
duce jobs that need run on geo-distributed data. The
proposed solution follows a hierarchical approach,
where a top-level entity takes care of serving a
submitted job: the job is split into a number of
bottom-level, independent MapReduce sub-jobs that
are scheduled to run on the sites where data natively
reside or have been ad-hoc moved to. The designed
job scheduling algorithm aims to exploit fresh in-
formation continuously sensed from the distributed
computing context (available sites computing capac-
ity and inter-site bandwidth) to estimate each jobs best
execution path. In the paper we disclose some details
on the job scheduling algorithm and, in particular, we
stress on its capability to compute the best execution
178
Cavallo, M., Cusma’, L., Modica, G., Polito, C. and Tomarchio, O.
A Hadoop based Framework to Process Geo-distributed Big Data.
In Proceedings of the 6th International Conference on Cloud Computing and Services Science (CLOSER 2016) - Volume 1, pages 178-185
ISBN: 978-989-758-182-3
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

path and forecast the job’s completion time. Tests
have been conducted on the software prototype in or-
der to check that the actual job’s completion time (the
one measured at job execution time) gets close to the
forecast.
The paper is organized as follows. In Section 2
the literature is reviewed. In Section 3 an overview of
the proposal is presented. Technical details of the pro-
posed system architecture are discussed in Section 4.
In Section 5 we delve into the strategy implemented
by the job scheduler component. In Section 6 the re-
sults of the tests run on the system’s software proto-
type are presented. Section 7 concludes the work.
2 RELATED WORK
In the literature two main approaches are followed
by researchers to efficiently process geo-distributed
data: a) enhanced versions of the plain Hadoop im-
plementation which account for the nodes and the
network heterogeneity (Geo-hadoop approach); b) hi-
erarchical frameworks which gather and merge re-
sults from many Hadoop instances locally run on dis-
tributed clusters (Hierarchical approach). The for-
mer approach aims at optimizing the job performance
through the enforcement of a smart orchestration of
the Hadoop steps. The latter’s philosophy is to exploit
the native potentiality of Hadoop on a local base and
then merge the results collected from the distributed
computation. In the following a brief review of those
works is provided.
Geo-hadoop approaches reconsider the phases of
the job’s execution flow (Push, Map, Shuffle, Reduce)
in a perspective where data are distributed at a geo-
graphic scale, and the available resources are not ho-
mogeneous. In the aim of reducing the job’s aver-
age makespan, phases and the relative timing must be
adequately coordinated. Some researchers have pro-
posed enhanced version of Hadoop capable of opti-
mizing only a single phase (Kim et al., 2011; Mattess
et al., 2013). Heintz et al.(Heintz et al., 2014) analyze
the dynamics of the phases and address the need of
making a comprehensive, end-to-end optimization of
the job’s execution flow. To this end, they present an
analytical model which accounts for parameters such
as the network links, the nodes capacity and the ap-
plications profile, and transforms the makespan mini-
mization problem into a linear programming problem
solvable with the Mixed Integer Programming tech-
nique.
Hierarchical approaches tackle the problem from
a perspective that envisions two (or sometimes more)
computing levels: a bottom level, where several plain
MapReduce computations occur on local data only,
and a top level, where a central entity coordinates the
gathering of local computations and the packaging of
the final result. In (Luo et al., 2011) authors present a
hierarchical MapReduce architecture and introduces
a load-balancing algorithm that makes workload dis-
tribution across multiple clusters. The balancing is
guided by the number of cores available on each clus-
ter, the number of Map tasks potentially runnable at
each cluster and the nature (CPU or I/O bound) of the
application. The authors also propose to compress
data before their migration from one data center to
another. Jayalath et al.(Jayalath et al., 2014) make an
exhaustive analysis of issues concerning the execution
of MapReduce on geo-distributed data. The particular
context addressed by authors is the one in which mul-
tiple MapReduce operations need to be performed in
sequence on the same data.
With respect to the cited works, our places among
the hierarchical ones. The approach we propose dif-
fers in that it strives to exploit fresh information con-
tinuously sensed from the distributed computing con-
text (available sites computing capacity and inter-site
bandwidth) and calls on the integer partitioning tech-
nique to compose the space of the job’s potential exe-
cution paths and seek for the best.
3 SYSTEM DESIGN
According to the MapReduce paradigm, a generic
computation is called “job”. Upon a job submis-
sion, a scheduling system is responsible for splitting
the job in several tasks and mapping them to a set of
available nodes within a cluster. The performance of
a job execution is measured by its completion time
(some refers to it with the term makespan), i.e., the
time for a job to complete. Apart from the size of
the data to be processed, that time heavily depends on
the jobs execution flow determined by the schedul-
ing system and the computing power of the cluster
nodes where the tasks are actually executed. In a
scenario where computing nodes reside in distributed
clusters that are geographically distant to each oth-
ers, there is an additional parameter that may affect
the job performance. Communication links among
clusters (inter-cluster links) are often inhomogeneous
and have a much lower bandwidth than communica-
tion links among nodes within a cluster (intra-cluster
links). Also, clusters are not designed to have simi-
lar or comparable computing capacity, therefore they
might happen to be heterogeneous in terms of com-
puting power. Third, it is not rare that the data set to
be processed are unevenly distributed over the clus-
A Hadoop based Framework to Process Geo-distributed Big Data
179
ters. So basically, if a scheduling system does not
account for this threefold unbalancement (nodes ca-
pacity, communication links bandwidth, data set dis-
tribution) the overall jobs performance may degrade
dramatically. To face these issues, we propose a hi-
erarchical MapReduce framework where a top-level
scheduling system sits on top of a bottom-level dis-
tributed computing context and is continuously kept
informed about the dynamic conditions of the under-
lying computing context. Information retrieved from
the computing context is then used to drive the gener-
ation of each jobs optimum execution flow (or execu-
tion path). The basic reference scenario addressed by
Top-Level Job
Output Data
Result
Local Hadoop Job
Top Level
1
8
4
3
Data Transfer
Top Level Manager
Execute Top-Level
MapTask
5
5
6
6
Reduce
7
Bottom Level
MoveData
Site1
Site3
Site2
Push Top-Level
Map Result
Site4
MapReduce
MapReduce
6
9
Generate TJEP
2
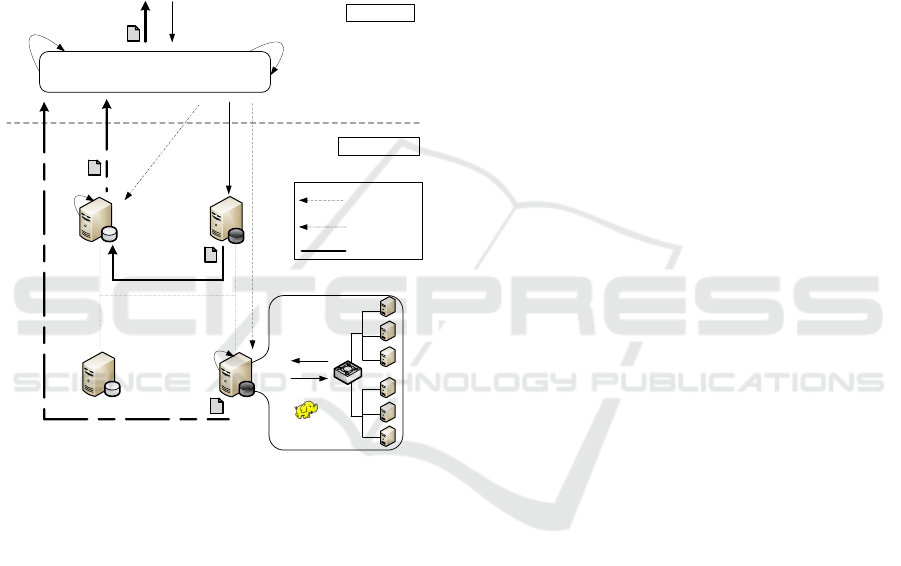
Figure 1: Job Execution Flow.
our proposal is depicted in Figure 1. Sites (data cen-
ters) populate the bottom level of the hierarchy. A Site
may be composed of one or more cluster nodes that
provide the overall Sites computing power. Each Site
stores a certain amount of data and is capable of run-
ning plain Hadoop jobs. Upon receiving a job, a Site
transparently performs the whole MapReduce process
chain on the local cluster(s) and returns the result of
the elaboration. The system business logic devoted to
the management of the geo-distributed computing re-
sides in the top-level of the hierarchy. When a new
Hadoop job is submitted that requires to process the
data distributed over the Sites, the business logic splits
the job into a set of sub-jobs, pushes them to the dis-
tributed context, gathers the sub-job results and pack-
ages the overall computation result. The novelty in-
troduced by this work is the adoption of a scheduling
strategy based on the integer partitioning technique
and the inclusion of the application profile among the
parameters that may influence the jobs optimum exe-
cution flow.
In the scenario of Figure 1 four geo-distributed
Sites are depicted that hold company’s business data
sets. The numbered arrows describe a typical execu-
tion flow triggered by the submission of a top-level
job. This specific case envisioned a shift of data from
one Site to another one, and the run of local MapRe-
duce sub-jobs on two Sites. Here follows a step-by-
step description of the actions taken by the system to
serve the job:
1. A Job is submitted to the Top-Level Manager,
along with the indication of the data set targeted
by the Job.
2. A Top-level Job Execution Plan is generated
(TJEP). For the elaboration of this plan, infor-
mation like the distribution of the data set among
Sites, the current computing capabilities of Sites,
the topology of the network and the current capac-
ity of its links are used.
3. The Master, located in the Top-Level Manager,
send a message to Site1 in order to shift data to
Site4.
4. The actual data shift from Site1 to Site4 takes
place.
5. The Master send a message to start the sub-jobs.
In particular, top-level Map tasks are triggered to
run on Site2 and Site4 respectively. We remind
that a top-level Map task corresponds to a Hadoop
sub-job.
6. Site2 and Site4 executes local Hadoop jobs on
their respective data sets.
7. Results obtained from local execution are sent to
the Top-Level Manager.
8. The Global Reducer of the Top-Level Manager
performs the reduction of partial data.
9. Final result is returned to the Job submitter.
The whole job execution process is totally transparent
to the submitter, who just needs to provide the type
of job to execute and the location of the target data to
process.
4 SYSTEM ARCHITECTURE
The System was designed according to the Service-
Oriented-Architecture (SOA) architectural pattern.
The middleware implementation is based on the OSGi
framework (OSGi Alliance, 2013), that allows to cre-
ate a service platform for the Java programming lan-
guage and implements a complete and dynamic com-
ponent model. Each component, configured as an
CLOSER 2016 - 6th International Conference on Cloud Computing and Services Science
180
OSGi Bundle, plays a specific role and interacts with
other bundles. Each site, belonging to the network, is
an independent system and has a full instance of the
middleware; this design choice guarantees the possi-
bility for each node to assume all of the roles. Indeed
the Bottom-Level logic is owned by any site of the
network, but only one node at a time can take the role
of the Top-Level Manager (by enabling specific mod-
ules).
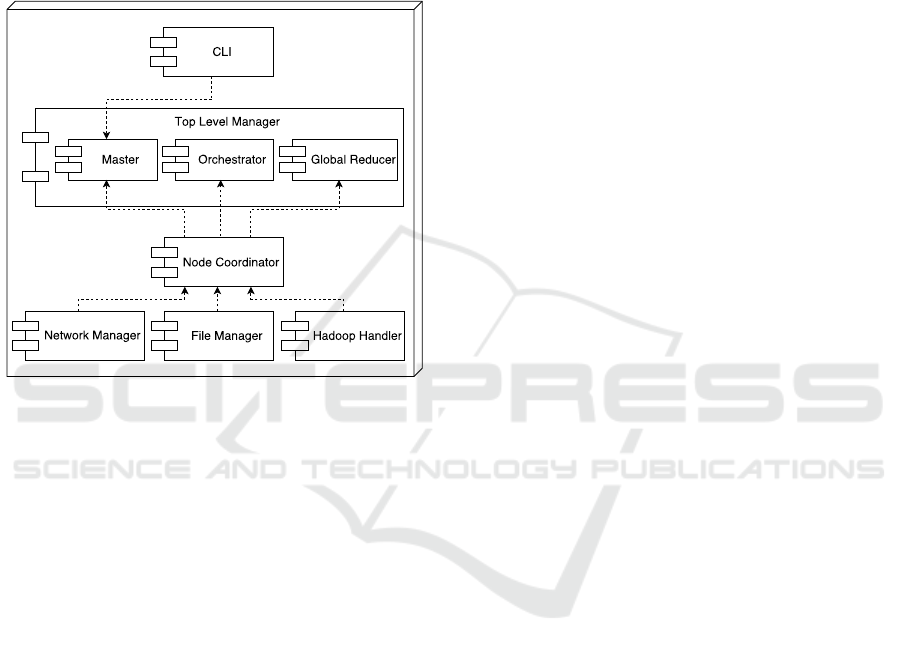
Figure 2: Overall architecture.
A middleware instance has the modular structure
depicted in Figure 2. Each module is designed to ful-
fill specific functions. The main modules are:
• Network Manager: it supports the communication
of the node with other nodes in the network.
• CLI: it represents the command line interface to
submit a job execution request to the middleware.
• File Manager: it implements the file system fea-
tures to keep track of middleware file namespace.
In this module the system load and storage bal-
ance algorithms are defined.
• Hadoop Handler: it is designed to decouple the
middleware layer from the underlying (plain)
Hadoop platform. It provides the capability to in-
teract with the features offered by plain Hadoop.
• Node Coordinator: this module maintains the
node status and implements the orchestrator’s
election algorithm. Any site is potentially eligi-
ble as Coordinator.
The above described modules are common to all
nodes. The middleware also includes optional mod-
ules that are deployed only on sites playing specific
roles. The optional modules, which enable the Top-
Level Manager role, are:
• Orchestrator: it monitors the distributed contexts
resources and is responsible for the generation of
a Top-level Job Execution Plan (TJEP).
• Master: this role is taken by the site who receives
the top level job execution request. It asks the or-
chestrator for the job execution plan and enforce
it. It receives the final result of job processing
from the Global Reducer and forward it to the job
submitter.
• Global Reducer: it collects all the results obtained
from the execution of sub-job concerning a spe-
cific job and performs the top-level reduction on
those results.
4.1 The Orchestrator Module
The orchestrator module represents the core compo-
nent of the architecture. Its main tasks are basically
the following ones:
• gathering information on the Sites’ overall avail-
able computing capacity and the inter-site band-
width capacity.
• generating the TJEP, which contains directives on
how data have to be re-distributed among Sites
and on the allocation of sub-jobs that have to be
run on those Sites.
Let us analyze in detail the orchestrator function-
alities. As mentioned before, one of the orchestra-
tor’s task is to acquire knowledge about the resources
distributed in the bottom level’s computing context.
Each Site periodically advertises its capacity to the
Orchestrator. Such capacity represents the overall
computing capacity of the Site for MapReduce pur-
poses (overall nominal capacity). Further, we assume
that Sites enforce a computing capacity’s allocation
policy that reserves a given, fixed amount of capacity
to any submitted MapReduce job. Since the amount
of computing capacity potentially allocable to a sin-
gle job (slot capacity) may differ from Site to Site,
Sites are requested to also communicate that amount
along with the overall nominal capacity. The available
inter-site link capacity is instead “sensed” through a
network infrastructure made of SDN-enabled (Kreutz
et al., 2015) switches. Switches are capable of mea-
suring the instant bandwidth used by incoming and
outgoing data flows. The Orchestrator periodically
enquires the switches to retrieve the bandwidth usage
and elaborates statistics on the inter-site bandwidth
usage. The Orchestrator is thus able to build and
maintain a Computing Availability Table that keeps
track of every sites instant and future capacity, aver-
age capacity in time, and other useful historical statis-
tics on the computing capacity parameter. The in-
A Hadoop based Framework to Process Geo-distributed Big Data
181
formation about the inter-sites links is stored into a
Bandwidth Availability Table.
The described monitoring functionality is strictly
related to the generation of the TJEP. All the infor-
mation collected from the bottom level’s computing
context represent the base knowledge needed for the
definition of a scheduling strategy. Those data, along
with the profile of the job to be executed, constitute
the input of the scheduling strategy performed by the
Scheduler that is located into the orchestrator module.
Section 5 will describe in details the TJEP generation
process.
5 SCHEDULING STRATEGY
In order to compute the TJEP, the Orchestrator will
call on a scheduling strategy that explores the uni-
verse of all feasible execution paths for that specific
distributed computing context.
If it may appear clear that the sites’ computing ca-
pacity and the inter-site bandwidth affect the overall
path’s completion time, some words have to be spent
on the impact that the type of MapReduce application
may have on that time. We argue that if the scheduling
system is aware of the application behaviour in terms
of the data produced in output with respect to the data
taken in input, it can use this information to take im-
portant decisions. In a geo-distributed context, mov-
ing big amounts of data back and forth among Sites is
a “costly” operation. If the size of the data produced
by a certain application can be known in advance, this
information will help the scheduling system to decide
on which execution path is best for the application.
In (Heintz et al., 2014) the authors introduce the
α expansion/compression factor, that represents the
ratio of the size of the output data of the Map task of
a MapReduce job to the size of its input data. In our
system focus is on the MapReduce process (not just
on the Map phase) that takes place in a Site. Therefore
we are interested in profiling applications as a whole.
We then introduce the data Compression factor
β
app
, which represents the ratio of the output data size
of an application to its input data size:
β
app
=
Out putData
app
InputData
app
(1)
The β
app
parameter may be used to calculate the
amount of data that is produced by a MapReduce job
at a Site, traverses the network and reaches the Global
Reducer. Depending on that amount, the data transfer
phase may seriously impact on the overall top-level
job performance. The exact value of β
app
for a sub-
mitted application may not be known a priori. The
work in (Cavallo et al., 2015) discusses how to get a
good estimate for the β
app
.
We adopt a graph model to represent the job’s
execution path. Basically, a graph node may rep-
resent either a Data Computing Element (site) or a
Data Transport Element (network link). Arcs be-
tween nodes are used to represent the sequence of
nodes in an execution path. A node is the place where
a data flow arrives (input data) and another data flow
is generated (output data). A node representing a
computing element elaborates data, therefore it will
produce an output data flow whose size is different
than that of input; a node representing a data transport
element just transports data, so input and output data
coincide. Nodes are characterized by two parameters:
the β
app
, that is used to estimate the data produced by
a node, and the Throughput, defined as the amount of
data that the node is able to process per time unit. The
β
app
value for Data Transport Elements is equal to 1,
because there is no data computation occurring in a
data transfer. As for the Data Computing Element,
instead, β
app
strictly depends on the type of applica-
tion to be executed. In the case of Data Transports
Element, the Throughput is equal to the link capacity.
The Throughput of a Data Computing Elements de-
pends again on both the application type and the Site’s
computing capacity. Finally, arcs between nodes are
labeled with a number representing the size of the data
leaving a node and reaching the next node.
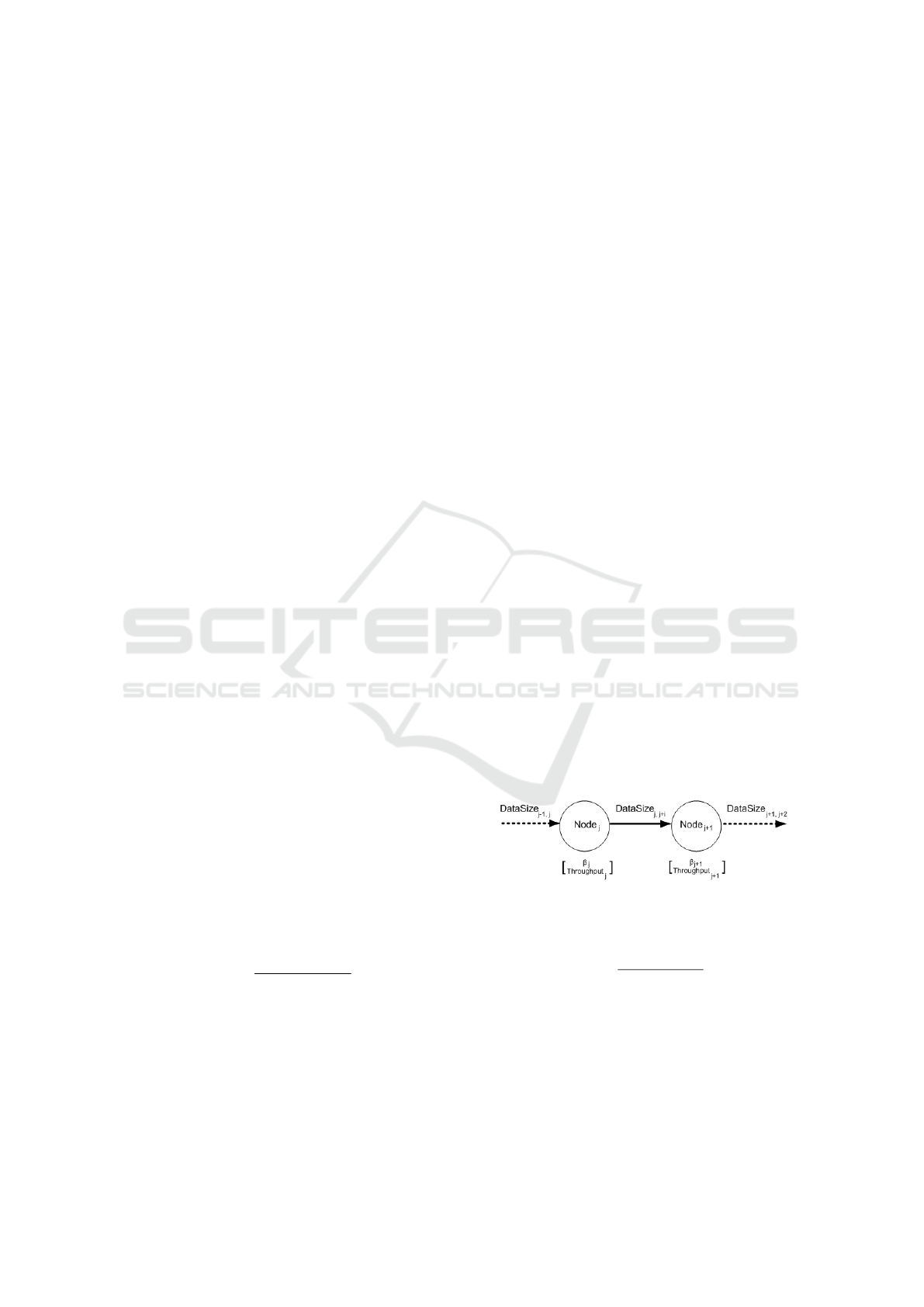
The label value of the arc connecting node j − th
to node ( j + 1) −th is given by:
DataSize
j, j+1
= DataSize
j−1, j
× β
j
(2)
In Figure 3 an example of a graph branch made of two
nodes and a connecting arc is depicted:
Figure 3: Nodes’ data structure.
A generic node j’s execution time is defined as:
T
j
=
DataSize
j−1, j
T hroughput
j
(3)
An execution path is then modeled as a graph of
nodes. The scheduling system is therefore requested
to search for the best execution path. The hard part of
the scheduling system work is the generation of all the
potential execution paths. The algorithm used to gen-
erate potential execution paths and to select the best
one is described in Listing 1. It is based on the Integer
CLOSER 2016 - 6th International Conference on Cloud Computing and Services Science
182
Partitioning theory(Andrews, 1976); for a deeper de-
scription of the algorithm steps the reader may refer
to (Cavallo et al., 2015).
1 pa r s i n g_ t op ol o gy _f r om _ co nf i g_ f il e
2 ge t_ ma p pe r _b e ta _a n d_ t hr ou g hp u t
3 mi n i mu m T i m e = m a x V a l u e
4 ge ne ra t e_ m ap p er _ co mb i na t io n s
5 fo r e a c h ( ma p p e r _ co m b in a ti o n )
6 generate ex ec u t i on P a t h
7 d e t e ct _ co nf l ic t s_ in _ ex e cu ti o nP a th
8 wh i l e (! co nf l ic t l is t _i s _e m pt y )
9 r e s o l ve _ co nf l ic t _i n_ e xe c ut io n Pa th
10 e v a l u at e _e x ec u ti o nT i m e
11 if ( e x e c u t io n T i me <= m i n i m u mT i m e )
12 bet s t P a t h L is t . add ( e xe c u t io n P a th )
13 mi n _t r a n sf e r s = m a x _ v a l u e
14 fo r e a c h ( ex e c u ti o nP a th _ in _b e st P at h Li st )
15 tran s f e r s = e v a l ua t e_ n um b er _ of _ tr an s fe r s
16 if ( t r a n sf e r s_ n u mb e r <= m i n_ t r a ns f e r s )
17 be t s tP a t h = e x e c u t i o nP a t h
18 re t u r n b e s tP a t h
Listing 1: TJEP pseudocode.
Let us now explain how to compute the execution
time of a specific execution path in a reference sce-
nario.
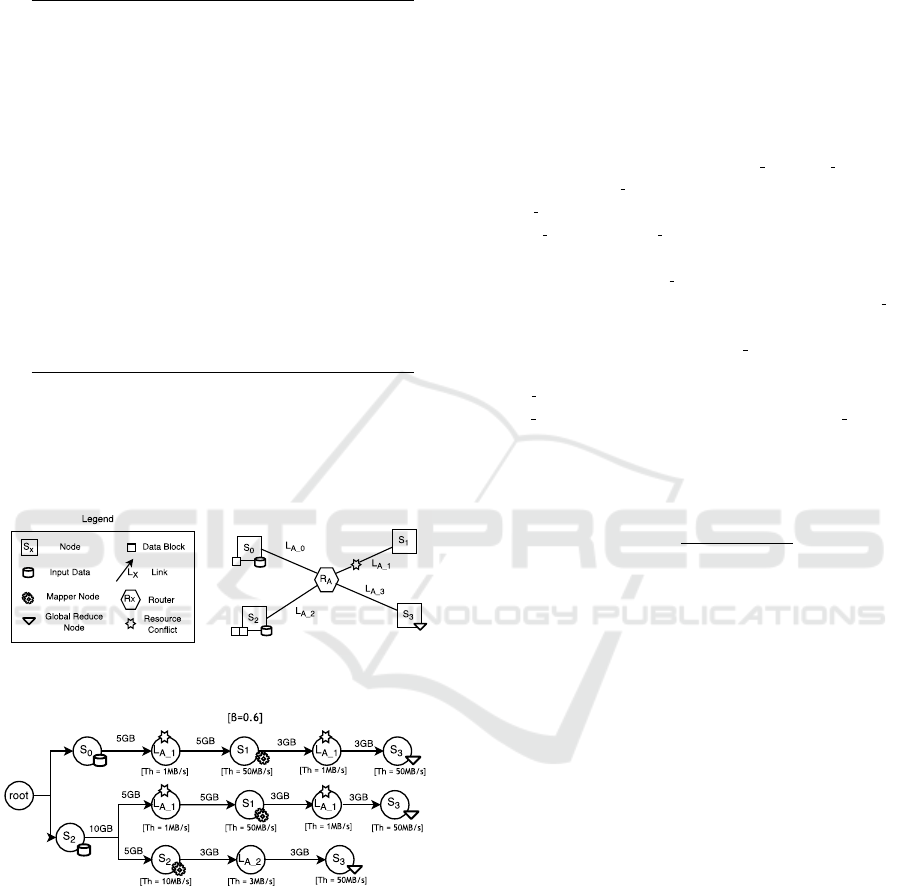
Figure 4: Example scenario topology.
Figure 5: Graph modeling a potential execution path.
Figure 4 depicts a scenario of four sites (S
0
through S
3
) and a geographic network interconnect-
ing the sites. A top-level job need to process a 15
GB data set distributed in this way: 5 GB located
in Site S
0
and 10 GB located in Site S
2
. Let us as-
sume that one of the execution-paths generated by
the scheduling system involves the movement of 5GB
data from S
2
to S
1
, and that three MapReduce sub-
jobs will be executed at S
1
and S
2
respectively. The
Global reducing of the data produced by the MapRe-
duce sub-jobs will be performed at S3. In Figure 5
the graph that models a potential execution path for
the just discussed configuration is represented. Basi-
cally, a graph has as many branches as the number of
bottom-level MapReduce (three, in our case). Every
branch starts at the root node (initial node) and ends at
the Global reducer’s node. In the example, the branch
in the bottom models the elaboration of data initially
residing in node S
2
, that are map-reduced by node S
2
itself, and results are finally pushed to node S
3
(the
Global reducer) through the links L
A 2
and L
A 3
. In the
graph, only the L
A 2
link is represented as it is slower
than L
A
3
and will impose its speed in the overall path
S
2
→ L
A 2
→ R
A
→ L
A 3
→ S
3
. Similarly, in the top-
most branch the data residing in node S
0
are moved to
node S
1
through link L
A 1
, are map-reduced by node
S
1
and results are pushed to node S
3
through link L
A 1
.
In the central branch the data residing in node S
2
are
moved to node S
1
through link L
A 1
, are map-reduced
by node S
1
and results are pushed to node S
3
through
link L
A 1
. Both the nodes S
0
and S
2
try to access the
link L
A 1
. The detected conflict on the link L
A 1
must
be resolved before the graph evaluation. Conflict res-
olution algorithm is described in detail in section 5.1.
The execution time of a branch is computed as the
sum of the execution times of all the branch’s nodes:
T
branch
=
N−1
∑
j=1
DataSize
j, j+1
T hroughput
j+1
(4)
being N the number of nodes in the branch.
The overall execution time estimated for the spe-
cific execution path is defined as the sum of Global re-
ducer’s execution time and the maximum among the
branches’ execution times:
T
path
= max
1≤K≤P
(T (K)
branch
) + T hroughput
GR
(5)
The execution time of the Global reducer is given
by the summation of the sizes of the data sets com-
ing from all the branches over the node’s estimated
throughput. This concludes the computation of the
execution time of the considered graph. We remind
that the scheduling system is able to generate many
job’s execution paths, for each of which the execution
time is calculated. In the end, the best path to sched-
ule will be, of course, the one with the shortest time.
5.1 Conflicts Detection and Resolution
An execution path is a sequence of steps that termi-
nates with the global reduction of locally elaborated
data. Basically, data blocks traverse inter-site net-
work links that may happen to be shared. Being the
usage of network links not exclusive, the scheduler
must take into account the fact that when two or more
A Hadoop based Framework to Process Geo-distributed Big Data
183

data blocks are traversing the same link, its through-
put is shared among them and, therefore, in that case
the performance offered by the resource “link” to each
traversing data block is not the nominal link through-
put. That said, for each execution path the scheduler
will have to search for any data blocks conflicting on
the use of any network link.
The TJEP generation algorithm has been en-
hanced by adding a new feature to manage network
conflicts. The conflicts management is a two-phases
process:
• Conflict Detection: identifying all nodes that re-
quire simultaneous access to the same physical
network resource.
• Conflict Resolution: redistributing throughput
among nodes that compete for resource.
As for the detection phase, the scheduler analyzes ev-
ery generated execution path. For a given path, each
node’s start time and end time are stored on a map
(collection of key - value pair) where:
• the key is the concatenation between the re-
source’s Id and the instant of use;
• the value is an object composed by a counter and a
list. The counter is incremented on every attempt
to write on the entry, and represents the number of
simultaneous access to the resource; the list con-
tains the references to the nodes that try to access
the resource at the same time.
Conflicts resolution is performed by dividing the total
throughput of the physical network resource among
nodes that are competing for it. Starting from the in-
formation collected in the resources map, it is possible
to detect the graph nodes competing for the resource.
Every node’s throughput is updated according to the
following policy.
The nominal throughput is equally divided among
the nodes that need to access the resource at the same
time. The node’s throughput is computed as follows:
T h
node
=
T h
nominal
Con f lictOccurrences
where: T h
node
: Node throughput; T h
nominal
: Nominal
throughput; Con f lictOccurrences: number of con-
flicts on the network resource.
At the end of the conflicts resolution phase,
the nodes’ throughput values are updated and the
conflicts are marked as solved. Starting from the
conflicts-free graph model, the execution time esti-
mate is performed.
6 EXPERIMENT RESULTS
To evaluate the performance and the accuracy of TJEP
scheduling algorithm we set up a testbed made of vir-
tual computing instances, which reproduces a geo-
graphically distributed computing context on a small
scale. In the testbed, a computing node (Site) is rep-
resented by a Virtual Machine (VM) instance. Each
node was configured with 2GB vRam and a Single
vCore CPU that has a theoretical computing power of
15GFLOPS. The reference scenario includes 5 nodes
as depicted in Figure 6.
Figure 6: Testbed Topology.
The Sites are connected by a virtualized network
infrastructure. For the test purpose, the links’ capac-
ity was set to 10MB/s each. Experiments were run on
the WordCount application, for which the estimated
compression factors turned out to be β
app
= 0.015.
The datablock size used for our tests was 1 GByte.
When fed with the WordCount configuration, the
scheduler generated 510 potential execution paths in
about less than 3 seconds. The main objective of the
experiment was to compare the performance of the
best execution path generated by our scheduler with
the real job execution time. We run several tests on
the configuration described above. Each test was car-
ried out by modifying the initial data location in order
to analyze the behaviour of the TJEP in different sit-
uations. Table 1 shows the results obtained from the
tests.
As the reader may observe, in all the tests the er-
ror between the TJEP predicted execution time and
the real job execution time was below 10% on aver-
age. The error made by the TJEP is very likely due to
the unpredictability of the performance produced by
the virtual computing environment used to simulate
the geographically distributed environment. Anyway,
the obtained result shows that the TJEP is capable of
making good guess of what to expect in term of per-
formance from the actual computation.
CLOSER 2016 - 6th International Conference on Cloud Computing and Services Science
184
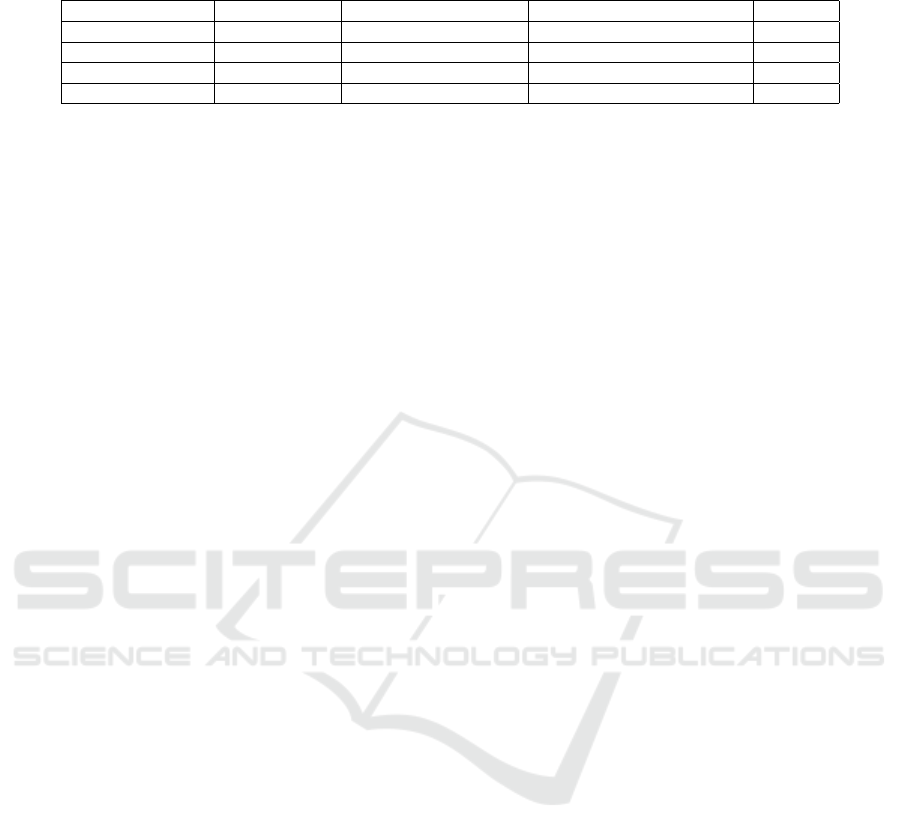
Table 1: Experiment results.
Data block location Global Reducer Real Execution Time [s] Predicted Execution Time [s] Error [%]
S
1
,S
3
,S
5
S
2
753 698 7%
S
1
,S
5
,S
5
S
2
883 812 8%
S
3
,S
5
,S
5
S
5
901 818 9%
S
5
,S
5
,S
5
S
5
998 911 9%
7 CONCLUSION
The gradual increase of the information daily pro-
duced by devices connected to the Internet, com-
bined with the enormous data stores found in tradi-
tional databases, has led to the definition of the Big
Data concept. MapReduce, and in particular its open
implementation Hadoop, has attracted the interest of
both private and academic research as the program-
ming model that best fit the need for efficiently pro-
cess heterogeneous data on a large scale. In this paper
we describe a solution based on hierarchical MapRe-
duce that allows to process big data located in geo-
distributed datasets. Our approach involves the de-
sign and the implementation of a hierarchical Hadoop
framework, considering the available computational
resources, the bandwidth of the links and the simul-
taneous accesses to resources, is able to generate an
execution plan that optimizes the completion time of
a job. A test-bed was implemented to prove the via-
bility of the approach. Future work will focus on the
improvement of the reliability and the accuracy of the
scheduling algorithm.
REFERENCES
Andrews, G. E. (1976). The Theory of Partitions, volume 2
of Encyclopedia of Mathematics and its Applications.
Cavallo, M., Cusm
´
a, L., Di Modica, G., Polito, C., and
Tomarchio, O. (2015). A scheduling strategy to run
Hadoop jobs on geodistributed data. In CLIOT 2015
- 3rd International Workshop on CLoud for IoT, in
conjunction with the Fourth European Conference
on Service-Oriented and Cloud Computing (ESOCC),
Taormina (Italy).
Dean, J. and Ghemawat, S. (2004). MapReduce: simplified
data processing on large clusters. In OSDI04: Pro-
ceeding of the 6th Conference on Symposium on op-
erating systems design and implementation. USENIX
Association.
Heintz, B., Chandra, A., Sitaraman, R., and Weissman, J.
(2014). End-to-end Optimization for Geo-Distributed
MapReduce. IEEE Transactions on Cloud Comput-
ing, PP(99):1–1.
Jayalath, C., Stephen, J., and Eugster, P. (2014). From
the Cloud to the Atmosphere: Running MapReduce
across Data Centers. IEEE Transactions on Comput-
ers, 63(1):74–87.
Kim, S., Won, J., Han, H., Eom, H., and Yeom, H. Y.
(2011). Improving Hadoop Performance in Intercloud
Environments. SIGMETRICS Perform. Eval. Rev.,
39(3):107–109.
Kreutz, D., Ramos, F., Esteves Verissimo, P., Es-
teve Rothenberg, C., Azodolmolky, S., and Uhlig, S.
(2015). Software-Defined Networking: A Compre-
hensive Survey. Proceedings of the IEEE, 103(1):14–
76.
Luo, Y., Guo, Z., Sun, Y., Plale, B., Qiu, J., and Li, W. W.
(2011). A Hierarchical Framework for Cross-domain
MapReduce Execution. In Proceedings of the Second
International Workshop on Emerging Computational
Methods for the Life Sciences, ECMLS ’11, pages 15–
22.
Mattess, M., Calheiros, R. N., and Buyya, R. (2013). Scal-
ing MapReduce Applications Across Hybrid Clouds
to Meet Soft Deadlines. In Proceedings of the 2013
IEEE 27th International Conference on Advanced In-
formation Networking and Applications, AINA ’13,
pages 629–636.
OSGi Alliance (2013). Open Service Gateway initiative
(OSGi). Available at http://www.osgi.org/.
Petri, I., Montes, J. D., Zou, M., Rana, O. F., Beach, T.,
Li, H., and Rezgui, Y. (2014). In-transit data analysis
and distribution in a multi-cloud environment using
cometcloud. In International Conference on Future
Internet of Things and Cloud, FiCloud 2014, pages
471–476.
Wright, P. and Manieri, A. (2014). Internet of things in the
cloud - theory and practice. In CLOSER 2014 - Pro-
ceedings of the 4th International Conference on Cloud
Computing and Services Science, pages 164–169.
A Hadoop based Framework to Process Geo-distributed Big Data
185
