
Focus-aid Signal for Ultra High Definition Cameras
Seiichi Gohshi
1
and Hidetoshi Ito
2
1
Kogakuin University, 1-24-2, Nishi-Shinjuku, Shinjuku0ku, Tokyo, Japan
2
Leader Corporation, 2-6-33, Tsunasima Higashi, Kouhoku-Ku, Yokohama-Shi, Kanagawa, Japan
Keywords:
Focus, Super Resolution, Nonlinear Signal Processing, Edge Detection.
Abstract:
4K and 8K systems are very promising media and offer highly realistic images. Such high-resolution video
systems provide completely different impressions than HDTVs. However, it is difficult, even for a professional
cameraman, to adjust the 4K/8K camera focus using only the small viewfinder on a camera. Indeed, it is
sometimes difficult even to focus an HDTV camera with such a small viewfinder, and since 4K has four times
higher resolution than HDTV, it is almost impossible to adjust a small viewfinder with the same size as that of
an HDTV camera using only human eyes. Therefore, in content-creating fields, large monitors are generally
used to adjust the focus; however, large monitors are bulky and do not fit practical requirements, which means
that technical assistance is required. A possible solution to this problem is to detect the sharp edges created by
high-frequency elements in fine-focus images and superimpose those edges on the image; the cameraman can
then adjust the focus with additional information gained from maximizing the superimposed edges. However,
conventional edge detection technologies are vulnerable against noise, which means that practical situations
using this technique are limited to environments with good lighting conditions. This paper introduces a novel
signal processing method that enables cameramen to adjust a 4k camera focus using their eyes.
1 INTRODUCTION
4K and 8K video systems provide highly realistic ex-
periences and are said to be the ultimate in TV sys-
tems. 4K TVs and 4K video cameras are currently
sold in stores, and experimental 4K broadcasting has
begun in Japan; moreover, an 8K (SHV) broadcast-
ing service is planned for 2016. However, 4K/8K
content is still not sufficient and current professional
4K/8K equipment is bulky and heavy. To create more
4K/8K content, the size of the equipment needs to
be reduced. However, even if their size were re-
duced, there would still be the problem of focusing
the 4K/8K camera. 4K and 8K has four and six-
teen times higher resolution than full HDTV, respec-
tively. However, the viewfinders on these cameras are
small. Professional cameras do not have auto-focus
functions because professional camera persons are ca-
pable of adjusting the fine focus and complex focus
controls. Producers sometimes use blurry scenes and
gradual temporal focus in and out of scenes. There
are many focus techniques in the content production.
The professional camera persons were able to cope
with these difficult requirements until HDTV content
production. However it is very difficult to manually
adjust the focus using only the viewfinder found on
4K/8K cameras, and if the focus is off, 4K/8K cannot
live up to their full potential.
To solve this problem, large 4K liquid crystal dis-
plays (LCDs) are used in the field to adjust the fo-
cus. These displays are bulky and sometimes impos-
sible to use in small places. Although small moni-
tors are handy, they are insufficient for adjusting high-
resolution 4K/8K. Thus, a new technology that can
help human eyes adjust the focus would be much ap-
preciated. Edges in a frame can be an indicator of
the focus. Edges have their highest frequency ele-
ments when the focus is adjusted. It is not difficult
to detect edges with a digital high-pass filter (HPF).
Thus, one possible solution would be superimposing
the edges of the image on the viewfinder. Adjusting
the focus on small viewfinders would be easier if the
edges were pronounced, and adjusting the focus to
maximize edges is not difficult with small viewfind-
ers; therefore, this method can provide a better fo-
cus point than just concentrating on the viewfinder’s
regular image. However, this method has limitations.
Video always has noise, which creates false edges;
these false edges interfere with adjusting the focus.
Furthermore, the edges detected by conventional, dig-
ital HPF are thick and have low levels that can be
compared with noise. The thick and low edges re-
176
Gohshi, S. and Ito, H.
Focus-aid Signal for Ultra High Definition Cameras.
DOI: 10.5220/0005750901740179
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 3: VISAPP, pages 176-181
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

gardless off the image being out of focus. Sharp, high
edges are required to adjust the focus, and these ap-
pear at the fine focus position. Thin edges can be gen-
erated if the edges have high-frequency elements. Su-
per resolution (SR) is one method for creating high-
frequency elements. However, most SR technologies
cannot work in real time (Farsiu et al., 2004)(Park
et al., 2003)(Katsaggelos et al., 2010)(van Eekeren
et al., 2010)(Freeman et al., 2000)(Freeman and Liu.,
2011)(Zhu et al., 2014).
SR with nonlinear signal processing (NLSP) has
been recently proposed. NLSP can work in real time
and can create higher-frequency elements than the
original image. These high-frequency elements can
create thin edges, and their quantity rapidly decreases
except for the fine focus point. NLSP also has high
tolerance against noise. This paper discusses focus
adjustment for 4K using SR with NLSP.
2 FOCUS AND EDGE
A fine focus produces a crisp video frame. The differ-
ence between a crisp frame and a blurry frame is ob-
tained by determining how fine the focus is. A crisp
frame has high-frequency elements; a blurry frame
does not. Therefore, the amount of high-frequencyel-
ements in a frame can be a barometer for the state of
the focus. High-frequency elements are the edges in
a frame. A focused frame has more edges than an un-
focused frame. Edges in a frame appear when a cam-
era shoots a scene that has detailed textures. When
the focus is turned on, the maximum amount of edges
appears. This type of focus aid system has been de-
veloped (Funatsu et al., 2013). However, it is difficult
to judge whether the focus is obtained on the basis of
the edges detected with the conventional HPF method
because of low level edges and noise.
Figures 1, 2, and 3 provide an example. Figure 1
is the original video frame; Figures 2 and 3 show the
frame with the absolute value of the edges superim-
posed on it. The luminance level is modified to check
the edges clearly, and HPF is used to detect the edges.
Figure 2 shows an out-of-focus result, and Figure 3
shows a fine focus result. Although the edges in Fig-
ure 2 are stronger than those in Figure 3, both look
similar; it is difficult to see the difference. Moreover,
noise is visible in both, which makes it more difficult
to adjust the focus with the edges. This is the limita-
tion of using conventional edge detection technology:
noise in a frame has high-frequency elements just like
the edges. Thus, even if the characteristics of HPF
change, the result will be similar because of the pres-
ence of noise.
Figure 1: Original image.
Figure 2: Out of focus image.
Figure 3: Fine focus image.
3 NLSP
The only practical method for improving resolution in
real time has been Enhancer (unsharp mask), which is
discussed here to clarify the real-time edge detection
method (Schreiber, 1970) (Lee, 1980) (Pratt, 2001).
Figure 4 shows the block diagram of a typical en-
hancer. It uses HPF to detect edges, which are then
processed with a limiter (LMT) until achieving ap-
propriate levels for the image. The edges are added
to the image with the adder block (ADD). Enhancer
merely amplifies the high-frequency elements in an
image, which means that noise is also amplified and
added to the image; this is exactly what happens in
Figures 2 and 3. Edges and noise are both ampli-
fied and added. This issue will be discussed again in
the section 4. Noise always appears in an image ex-
cept for sufficient lighting conditions such as in sunny
places in a fine day. The current technology (Funatsu
et al., 2013) can be usable only in good lighting lim-
ited conditions. A new technology is necessary to dis-
tinguish valuable edges from noise.
NLSP has been recently proposed to improve the
resolution of videos in real time. NLSP can distin-
Focus-aid Signal for Ultra High Definition Cameras
177
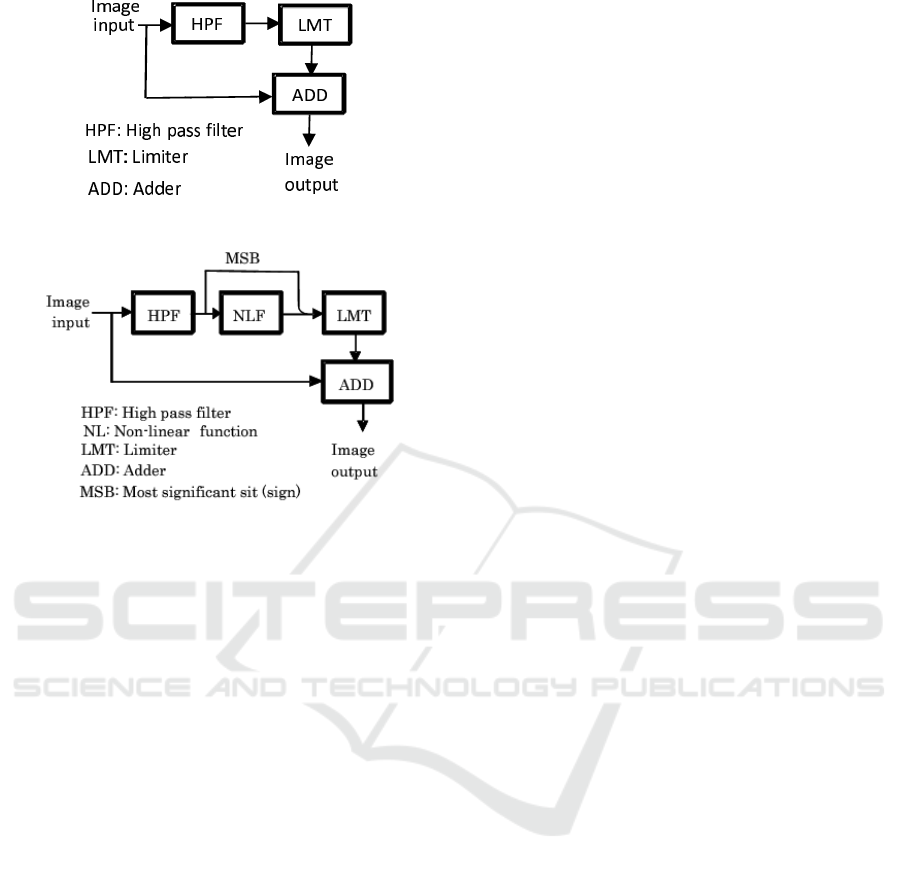
Figure 4: Enhancer.
Figure 5: NLSP.
guish edges from noise. Figure 5 shows the sig-
nal flow of NLSP. The upper path comprises an
HPF, a nonlinear function (NLF), and the LMT. The
edges in the video are detected with the HPF and
then processed with the NLF, which generates har-
monic waves from the edges. These harmonic waves
have higher-frequency elements than what the origi-
nal video has and are generated only from the edges
detected with the HPF. There are no harmonic waves
in flat areas, because there are no edges in flat ar-
eas. An example of an NLF is a cubic function. The
range of the input of the NLF is from 255 to 255 if
the depth of the video is 8 bits. The output of the
NLF becomes very large, because the cubic function
generates the pixels from 255
3
to 255
3
. The LMT
saturates these large values to fit the harmonic waves
to the video. The lower path is from the input and
is directly connected to the ADD. The ADD adds the
LMT-processed harmonic waves to the original video.
Thus, the output of the ADD has high-frequency el-
ements that the original video does not have. This
video processing method can improve resolution and
create high-frequency elements that exceed even the
Nyquist frequency.
Figure 6 shows a simulation result of using NLSP.
Figure 6(a) is a still image that has been enlarged hor-
izontally and vertically by a factor of two relative to
the original. Figure 6(c) shows the two-dimensional
fast Fourier transform (FFT) of (a). It does not have
high-frequencyelements, because it is an enlargement
image. Figure 6(b) shows the output of the image af-
ter it has been processed with NLSP according to the
flow shown in Figure 5. Figure 6(d) shows the two-
dimensional FFT of Figure 6(b). Comparing Figure
6(d) with Figure 6(c), we can see that (d) has high-
frequency elements that (c) does not have. Because
Figure 6(a) is horizontally and vertically enlarged by
a factor of two, the horizontal Nyquist frequency of
the original image is /2 in Figure 6(c). There are no
spectra beyond /2 in Figure 6(c), because the enlarged
image has the same spectra as the original image. In
contrast, the spectra in Figure 6(d) have elements that
Figure 6(c) does not have; it exceeds the Nyquist fre-
quency (/2) of the original image. This proves that
the proposed method can create higher frequency ele-
ments than the Nyquist frequency of the original im-
age. It is also important to note that Figure 6(b) does
not have visible noise. Noise in NLSP is discussed in
the next section.
4 EDGE DETECTION
Figure 7(a) shows the graphical image of edges cre-
ated by conventional HPF and Figure 7(b) shows the
edges created by NLSP. The edges created by NLSP
are stronger and sharper than those created using con-
ventional HPF. Moreover, the edges are also thin-
ner and higher because harmonic high-frequency ele-
ments with NLF are added to the original edges. The
edges created with NLSP show the focus point with
strong edges, which help in focus adjustment.
Here we discuss the edge detection method with
conventional HPF (Funatsu et al., 2013) and with
NLSP. In generally, noise is smaller than the edges
in images and videos. Figures 8(a) shows an exam-
ple of edges detected from video by the conventional
method and Figure 8(b) shows an example of edges
detected from video by NLSP. A threshold level is
selected to detect the true edges in a video from the
edges by noise. However,in Figure 8(a) the true edges
detected by HPF are not sufficiently larger than the
edges with noise. The edges detected by conventional
HPF have levels similar to the noise. If we define a
threshold level to discriminate the edges in an image
from noise, the allowance for the level is narrow, as
shown in Figure 8(a). The detected edges are very
small and it is very difficult to separate the true edges
in the image from those detected by noise. If we de-
tect the true edges in the video, we have to lower the
threshold level.
In this case as shown in Figure 8(b) the appropri-
ate threshold level does not exist and edges cannot be
separated from the edge. The edges caused with noise
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
178
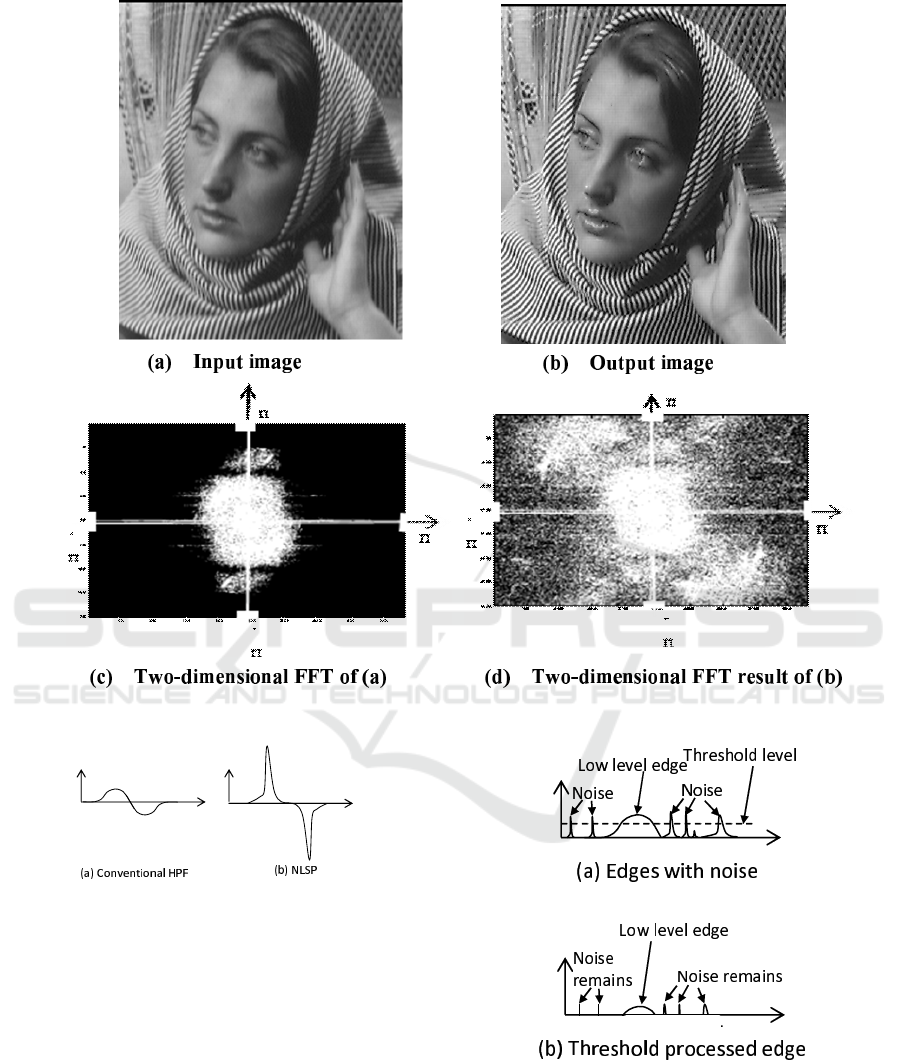
Figure 6: Image processed NLSP.
Figure 7: Created edges.
are also detected in video and it is impossible to adjust
the focus. This is exactly what happened in Figures 2
and 3. Conversely if we higher the threshold level to
remove the edges caused by noise, the true edges in
video are also removed.
Conversely, the edges detected by NLSP are larger
than those detected with HPF and noise can be sup-
pressed by the nonlinear function shown in Figure
9(a). Edges in the image are amplified by NLSP and
it becomes the high level edge(HLE) in Figure 9(a).
Conversely edges detected by noise (EN) are small.
NLSP makes the edge level differences bigger be-
tween HLE and EN. As shown in Figure 9, the levels
of HLE and EN can be separated with an appropri-
Figure 8: Threshold process for HPF.
ate threshold level. In Figures 8 it is very difficult to
find the threshold level to separate the true edges from
noise because their level are similar. In Figure 9 it is
easy to select the threshold level than that in Figure 8.
By controlling the threshold level, noise can be sup-
pressed so that only edges are detected, as shown in
Focus-aid Signal for Ultra High Definition Cameras
179
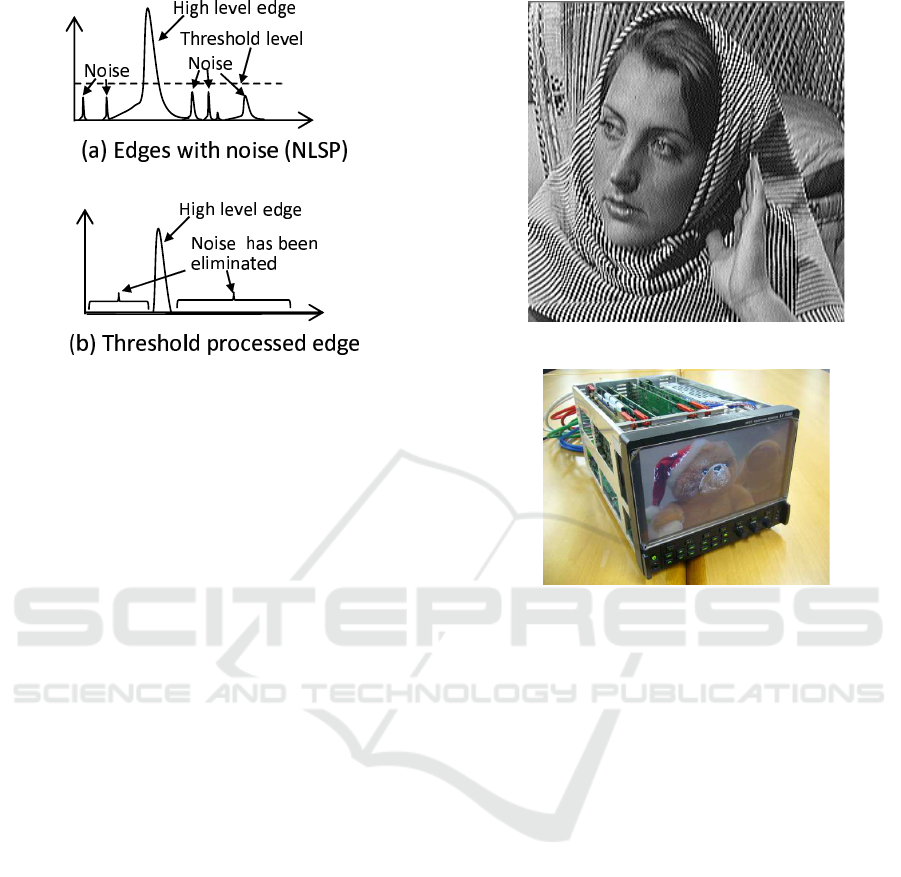
Figure 9: Threshold process for NLSP.
Figure 9(b). The edge shown in Figure 9(b) is thin-
ner and larger than that shown in Figure 8(b). The
edges amplified by the nonlinear function are much
more visible than are the edges detected by conven-
tional HPF, even though the characteristics are deeply
deliberated. The edges detected by NLSP are suffi-
ciently large to adjust the focus.
When we decide the parameters of enhancers,
noise is always problem. If we try to amplify the
edges very strong, noise becomes visible in flat areas
in the image; Figure 10 is an example of such noise.
Compared Figure 10 with Figure 6(b), noise in Figure
10 is visible in the flat areas such as in the forehead
and cheeks. This happens in Figures 2 and 3. NLSP
creates harmonics to make edges thinner and higher.
Conversely although noise is also processed by NLSP,
the energy of noise is small. Turning the parameters
of NLSP, it is possible for NLSP not to make small
edges unnecessarily higher; Figure 6(b) is an exam-
ple. Noise is not visible in the forehead and cheeks.
Real-time functionality is a fundamental require-
ment for video equipment, and adjusting the lens fo-
cus is no different: it must be able to be done in real
time. Furthermore, the focus adjusting system should
be installed in a small device. If the system is in
a bulky device, it will be impractical for daily use.
The proposed NLSP algorithm meets both of these re-
quirements because NLSP has been successfully im-
plemented in an field programmable gate array and
has worked as SR equipment for both 4K and 8K.
5 EXPERIMENT WITH
REAL-TIME HARDWARE
The real-time hardware shown in Figure 11 was de-
Figure 10: Enhancer processed image.
Figure 11: Real time hardware.
veloped to prove the validity and practicality of the
proposed method. Stuffed animals are set and shot
with a 4K camera. The 4K camera is connected to the
hardware and an LCD shows the stuffed animals and
the edges. The LCD displays a stuffed bear with white
dots appearing only on its face and hat. These dots are
the image’s edges and appear at very limited distances
from the 4K camera; this means that the focus is ad-
justed on the bear’s face. These white dots appear
only on focused areas and can assist in adjusting the
focus. Although the LCD is 9 inches, the edges are
sufficiently visible. A cameraman adjusts the focus
to maximize the edges he wants to focus on. Bulky,
55-inch monitors are not necessary to adjust the focus
for 4K/8K.
As discussed in Section III, NLSP is valuable to
use against noise; the conventional HPF edge de-
tection method does not have such noise tolerance.
Noise is especially a problem for dark, low-luminance
scenes. Here we discuss this issue with the image
shown in Figure 12. Figure 12 is shot with a 4K cam-
era and Figures 13 and 14 were the same ones taken
in a dark room. They show the difference between
the NLSP and conventional edge detection methods
in low-luminance conditions. In these figures, boxes
with ribbons are set in the frame and taken with a 4K
camera. A white rectangle in Figure 13 is drawn to in-
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
180

Figure 12: Original image.
Figure 13: Edge with the proposed method.
Figure 14: Edge with the conventional method.
dicate the area where the white dots exist; they appear
within the rectangle only at limited distances from the
4K camera, which means that the 4K camera focused
on the rectangle area. Figure 14 is shot with the con-
ventional edge detection method. In that figure, the
white dots appear all over the image because of noise
and strong edges that are less visible than those of
Figure 14. In Figure 13, it is impossible to determine
what the camera focused on.
6 CONCLUSION
A real-time focus adjustment algorithm for 4K, which
will aid human visual systems, is proposed. It pro-
duces edges only in small, on-focus areas, and these
edges are easily detected by human eyes even when
small LCDs are used. It also has high tolerance
against noise under low-light conditions. The system
is suitable for practical use in creating 4K content, un-
like large monitors.
REFERENCES
Farsiu, S., Robinson, M. D., Elad, M., and Milanfar, P.
(2004). Fast and robust multi frame super resolu-
tion. IEEE TRANSACTIONS on Image Processing,
13(10):1327–1344.
Freeman, W. T. and Liu., C. (2011). Markov random fields
for super-resolution and texture synthesis. MIT Press,
Advances in Markov Random Fields for Vision and
Image Processing.
Freeman, W. T., Pasztor, E. C., and Carmichael, O. T.
(2000). Learning low-level vision. International Jour-
nal of Computer Vision, 1(40):25–47.
Funatsu, R., Yamashita, Y., Mitani, K., and Nojiri, Y.
(2013). Focus-aid signal for super hi-vision cameras.
Technical Report 53.
Katsaggelos, A., Molina, R., and Mateos, J. (2010). Super
Resolution of Images and Video: Synthesis Lectures
on Images, Video and Multimedia Processing. Morgan
and Clayppo Publishers, La Vergne TN USA.
Lee, J. S. (March 1980). Ieee trans. on pattern analysis and
machine intelligence 2:165-168. Digital Image En-
hancement and Noise Filtering by Use of Local Statis-
tics.
Park, S. C., Park, M. K., and Kang, M. G. (2003).
Super-resolution image reconstruction: A technical
overview. IEEE Signal Processing Magazine, 1053-
5888/03:21–36.
Pratt, W. K. (2001). Digital Image Processing (3rd Ed):
New York. John Wiley and Sons.
Schreiber, W. F. (1970). Wirephoto quality improvement by
unsharp masking. J. Pattern Recognition, 2:111-121.
van Eekeren, A. W. M., Schutte, K., and van Vliet, L. J.
(2010). Multiframe super-resolution reconstruction
of small moving objects. IEEE TRANSACTIONS ON
IMAGE PROCESSING, 19(11):2901–2912.
Zhu, Z., Guo, F., Yu, H., and Chen, C. (2014). Fast sin-
gle image super-resolution via self-example learning
and sparse representation. Multimedia, IEEE Trans-
actions, 16(8).
Focus-aid Signal for Ultra High Definition Cameras
181
