
Introducing FoxFaces: A 3-in-1 Head Dataset
Amel Aissaoui
1
, Afifa Dahmane
1
, Jean Martinet
2
and Ioan Marius Bilasco
2
1
Computer Science Department, University of Science and Technologies Houari Boumediene -USTHB, Algiers, Algeria
2
Univ. Lille, CNRS, Centrale Lille, UMR 9189 - CRIStAL - Centre de Recherche en Informatique Signal et Automatique de
Lille, IRCICA, F-59000 Lille, France
Keywords:
Biometric Dataset, Face Analysis and Recognition, Expression, Pose, Multimodal.
Abstract:
We introduce a new test collection named FoxFaces, dedicated to researchers in face recognition and analysis.
The creation of this dataset was motivated by a lack encountered in the existing 3D/4D datasets. FoxFaces
contains 3 face datasets obtained with several devices. Faces are captured with different changes in pose,
expression and illumination. The presented collection is unique in two aspects: the acquisition is performed
using three little constrained devices offering 2D, depth and stereo information on faces. In addition, it contains
both still images and videos allowing static and dynamic face analysis. Hence, our dataset can be an interesting
resource for the evaluation of 2D, 3D and bimodal algorithms on face recognition under adverse conditions as
well as facial expression recognition and pose estimation algorithms in static and dynamic domains (images
and videos). Stereo, color, and range images and videos of 64 adult human subjects are acquired. Acquisitions
are accompanied with information about the subjects identity, gender, facial expression, approximate pose
orientation and the coordinates of some manually located facial fiducial points.
1 INTRODUCTION
The capability of a system to precisely assign an iden-
tity to a person in unconstrained, uncooperative, ”in
the wild” settings is still an open problem. Hard bio-
metric techniques such as iris and fingerprint-based
are widely used but require cooperative users (fin-
ger pressed strong against a reader, iris in front of a
dedicated camera). Soft biometric techniques such as
face-based are less intrusive, and yet generally work-
ing well if the illumination conditions are satisfactory
and the user is cooperative (facing the camera with
neutral expression).
Most of the proposed solutions are generally
based on the 2D images (2D face recognition) and
various color-, shape- and texture-features are used
and require at least one frontal pose of the face.
However, the 2D face recognition is very sensitive
to changes in pose, illumination and facial expres-
sion. The 3D face recognition was explored in order
to face problems encountered in 2D recognition. In-
deed, the 3D shape of the face is an important discrim-
inative information allowing better recognition accu-
racy. The 3D recognition is less sensitive to illumi-
nation and pose changes which makes it a potential
solution to face recognition problem, as it was demon-
strated in the FRGC evaluation (Phillips et al., 2005).
However, 3D methods require expensive devices (3D
scanners), long acquisition time and human cooper-
ation. With the large availability of depth cameras,
researchers tend to use ”less constrained” depth cam-
eras (e.g. Kinect), allowing rapid depth acquisition
and requiring less human cooperation. Indeed, these
advantages compensate the low quality of the depth
information comparing to 3D scanner data.
Most of the solutions proposed in the field of
face recognition are based on supervised or semi-
supervised training. Datasets which through the years
tried to get closer to ”in the wild” settings are used
for training and for measuring the effectiveness of
proposed algorithms. A number of datasets that ad-
dress the field of person recognition and encompass
also depth information are available. For instance,
the BU-3DFE dataset (Yin et al., 2006) presents fil-
tered 3D models acquired by 3D scanners of per-
sons expressing various expressions. However, the
quality of models used as training data may hardly
be achieved in a ”wild” environment using regu-
lar depth camera. In order to provide researchers
with adequate training datasets for handling 2D and
depth information especially, but not only, in the field
of face recognition, we have designed the FoxFaces
dataset. The FoxFaces dataset narrows the gap be-
tween lab and wild conditions, by using off-the-shelf
Aissaoui, A., Dahmane, A., Martinet, J. and Bilasco, I.
Introducing FoxFaces: A 3-in-1 Head Dataset.
DOI: 10.5220/0005714405330537
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 4: VISAPP, pages 533-537
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
533

camera allowing less constraining 3D acquisition in
order to approximate more realistic conditions. We
consider also, various expressions, poses and illu-
minations settings. The database is freely available
for research purposes and can be requested at URL
http://www.lifl.fr/FOX/index.php?page=datasets.
The paper is structured as follows. In Section
2, we introduce major datasets in the field of per-
son recognition covering head pose, gender and facial
expressions variations and using 2D, depth, stereo,
or 3D data, emphasizing the need for constructing a
novel dataset narrowing the gap between lab condi-
tions and wild settings. The methodology employed
to design and collect the dataset is described in details
in Section 3. Some experiments, in a face recognition
context, are presented in Section 4 before summariz-
ing the contributions and the new challenges related
to the proposed dataset in Section 5.
2 RELATED DATASETS
Many public datasets are available for face related re-
searches. Existing resources can be 2D or 3D. 3D
data can be divided into two major categories: data of-
fering a complete 3D face models using 3D scanners
and recently available, the data offering a view-based
3D face models using depth sensors (e.g. Microsoft
Kinect) which is our context of study.
The use of 3D data in conjunction with 2D data
has been broadly spread in face analysis research.
Datasets offering 3D information on faces were there-
fore proposed in order to evaluate algorithms in this
field. Table 1 lists some well-known bimodal 2D-
3D datasets and their specifications. We included the
proposed dataset in the bottom of the table in order
to show its contributions. 3D FRGC (Phillips et al.,
2005) and Texas (Gupta et al., 2010) datasets are
face recognition-oriented with some variations in fa-
cial expressions and illumination. Bosphorus dataset
(Savran et al., 2008) is more general and can be
used in different face analysis tasks. It contains a
large variation of head poses and face expressions.
BU-3DFE dataset (Yin et al., 2006) is expression
recognition-oriented. 7 expression shape models are
collected and a corresponding facial texture image
captured from two views is also given. BU-4DFE
dataset (Yin et al., 2008) is an extended version of
the BU-3DFE dataset offering temporal information
by capturing dynamic 3D data.
The above datasets are made via expensive equip-
ments (3D scanners) offering a high quality data
(complete 3D face models). Hence, they require spe-
cific acquisition conditions: sufficient time for scan-
ning, cooperation of the person to be identified in-
stalled in front of the scanner until the end of scan-
ning.
Recently, in order to extend the scope of 3D, the
research interest focuses increasingly on the use of
less restrictive 3D equipments (e.g. Kinect). In Ta-
ble 1, we include 2 recent datasets obtained via Mi-
crosoft Kinect sensor. BIWI database (Fanelli et al.,
2013) is compound of head movements 3D sequences
of 20 subjects under ambiant lighting and neutral ex-
pression. Eurecom dataset (Min et al., 2014) con-
tains still 2D and 3D images of 52 subjects show-
ing few changes in expression and head pose orien-
tation. Very few datasets acquired with depth sensors
are available and none, to the best of our knowledge,
encompasses all variations. In this paper, we present
a new face dataset which encompasses different data
modalities. This dataset presents 2D, 3D and stereo
images of the face, in order to allow testing and com-
paring face analysis methods in low constrained con-
text. The dataset offers both static and dynamic data.
3D dynamic data, also called 4D data, allows the ex-
tension of studies to a time-varying 3D faces. Addi-
tionally to these aspects, various face expressions and
head poses are taken from 64 subjects. Face analy-
sis can be performed under varying pose, expression
and illumination. In the remainder, we introduce the
dataset and highlight its usefulness for bimodal face
recognition.
3 THE FoxFaces DATASET
3.1 Acquisition Devices
The dataset has been built using an acquisition system
composed with 3 sensors:
• Infrared Sensor: we used Microsoft Kinect, that
contains a color camera, an infrared light, and an
infrared CMOS sensor (QVGA 320x240, 16 bits)
able to generate a depth map of the scene by esti-
mating the amount of reflected infrared light. The
farther an object, the less light it reflects.
• 3D Time-of-Flight Sensor: we have used Mesa
Imaging SR4000 sensor, that flashes the scene
with infrared light pulses,
• Stereo Camera: we used Point Grey Bumblebee
XB3, a multi-baseline sensor equipped with three
1.3 megapixel cameras. The large baseline offers
a higher precision in higher distances from cam-
era, and the small baseline enhances the matching
of small intervals.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
534
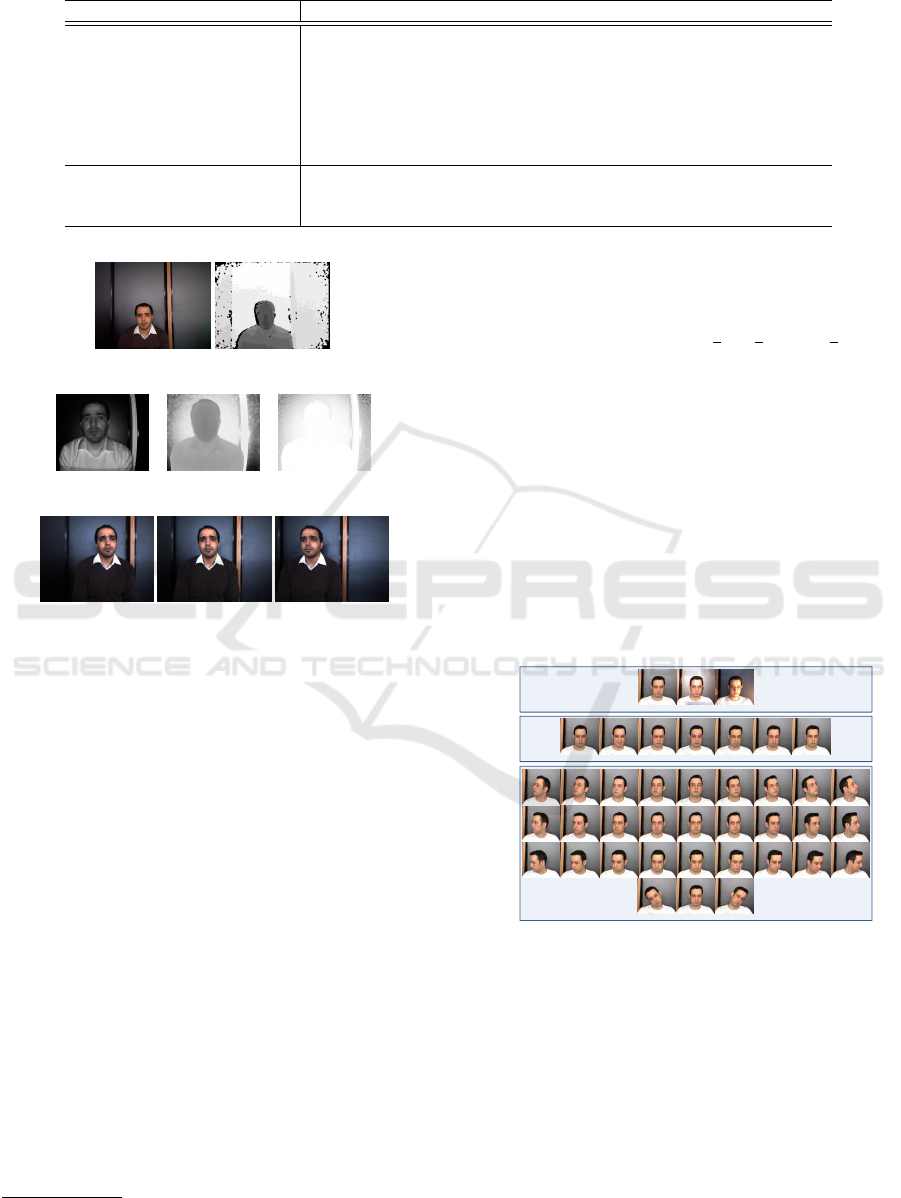
Table 1: List of some public 2D-3D face datasets (N = number of subjects).
Face dataset (N) Devices Expressions Illumination Pose Dyn./Static
3D FRGC (466) (Phillips et al., 2005) 3D scanner various various frontal static
Texas (118) (Gupta et al., 2010) 3D scanner neutral/smliling 3 illuminations frontal static
Bosphorus (105) (Savran et al., 2008) 3D scanner 35 expressions homogeneous 13 poses static
BU-3DFE (100) (Yin et al., 2006) 3D scanner 6 expressions homogeneous 2 sides static
BU-4DFE (101)(Yin et al., 2008) 3D scanner 6 expressions homogeneous frontal dynamic
BIWI (20) (Fanelli et al., 2013) Kinect neutral homogeneous free movements dynamic
Eurecom (52) (Min et al., 2014) Kinect 3 expressions 2 illuminations 3 yaw static
FoxFace (64) Kinect 7 expressions 3 illuminations 30 poses static+dynamic
ToF camera
Stereo
(a) (b)
(a) (b) (c)
(a) (b) (c)
Figure 1: Top row: example of infrared sensor images
(Kinect): (a) color image (b) depth image. Middle row: ex-
ample of TOF sensor images (SR4000): (a) infrared image
(b) depth image (c) confidence matrix (bright pixels show
high confidence. Bottom row: example of image triple ac-
quired with the stereo camera (Bumblebee XB3).
Three collections have been acquired with the ac-
quisition system: one stereo collection (FoxStereo),
and two bimodal 2D-3D collections (FoxKinect and
FoxTof). The 3D data for all collections are given as
depth maps.
3.2 Methodology
The data acquisition has been carried out indoor, in
our office rooms, with 64 subjects (46 males, 18 fe-
males) aged 22-59. Note that among the 46 males
persons, two are twin brothers. Subjects are located
1 meter away from the cameras
1
. Three parameters
(lighting conditions, face expression, and head pose)
are varied throughout the data acquisition. For each
subject, 40 images are recorded, corresponding to:
• 3 lighting conditions: ambient, frontal, side;
1
It is the minimal distance for the Kinect.
• 7 face expressions: joy, sadness, hanger, disgust,
fear, surprise, neutral;
• 30 head poses resulting from a combination of 9
positions in yaw (from −
π
2
to
π
2
, using
π
8
steps),
with 3 pitch directions (downwards, frontal, up-
wards), plus 2 roll positions (left and right).
To obtain the head poses, we have used markers
which correspond to the different horizontal and ver-
tical rotation of the head. Users are asked to look
straight ahead to the markers by moving their entire
head and not to direct their eyes.
In total, the collection contains 2560 images. Fig-
ure 2 shows an example of all possible variations for a
subject. In addition to static images (2D and depth), a
video sequence is also recorded for each subject, con-
taining all variations, for the three datasets FoxStereo,
FoxKinect et FoxTof.
(a)
(b)
(c)
Figure 2: Example of all possible variations for a subject:
(a) 3 lighting conditions (b) 7 face expressions (c) 30 head
poses.
3.3 Annotation
A manual annotation has been performed for 4 main
face interest points (eyes, nose tip, mouth center) in
order to enable a precise face localization. Figure 3
shows annotated point on a face from the dataset. All
images are given a label that encodes the following
information: subject id, image id, pose, lighting con-
dition, face expression, image type (2D, depth).
Introducing FoxFaces: A 3-in-1 Head Dataset
535
Figure 3: Annotated interest points on a face.
4 EXPERIMENTS AND
DISCUSSION
We present in this section some experiments con-
ducted on an example of application (in a face recog-
nition context) using two data partitions (FoxKinect
and FoxStereo).
Experiments are based on a bimodal (2D and
depth) face recognition framework (Aissaoui and
Martinet, 2015). The bimodal framework consid-
ered here is strongly inspired by LBP applied on both
depth and color channels. A variation of LBP char-
acterizing depth images (called DLBP) was proposed
in (Aissaoui et al., 2014). We use this descriptor
for constructing a depth-related feature vector. This
depth-related feature vector is combined with texture-
related LBP feature vector extracted from 2D images
in order to characterize, in a bimodal context, training
and testing faces. Before extracting depth and color
features, several preliminary transformations are ap-
plied. Faces are extracted from gray-level and depth
images using the annotations present in the dataset.
They are then normalized to 100x100 pixels. Depth
images presenting lot of missing data are dropped at
this stage. Denoising of depth images is also per-
formed as described in (Aissaoui et al., 2014). We
notice that head pose variation is not considered in
these experiments.
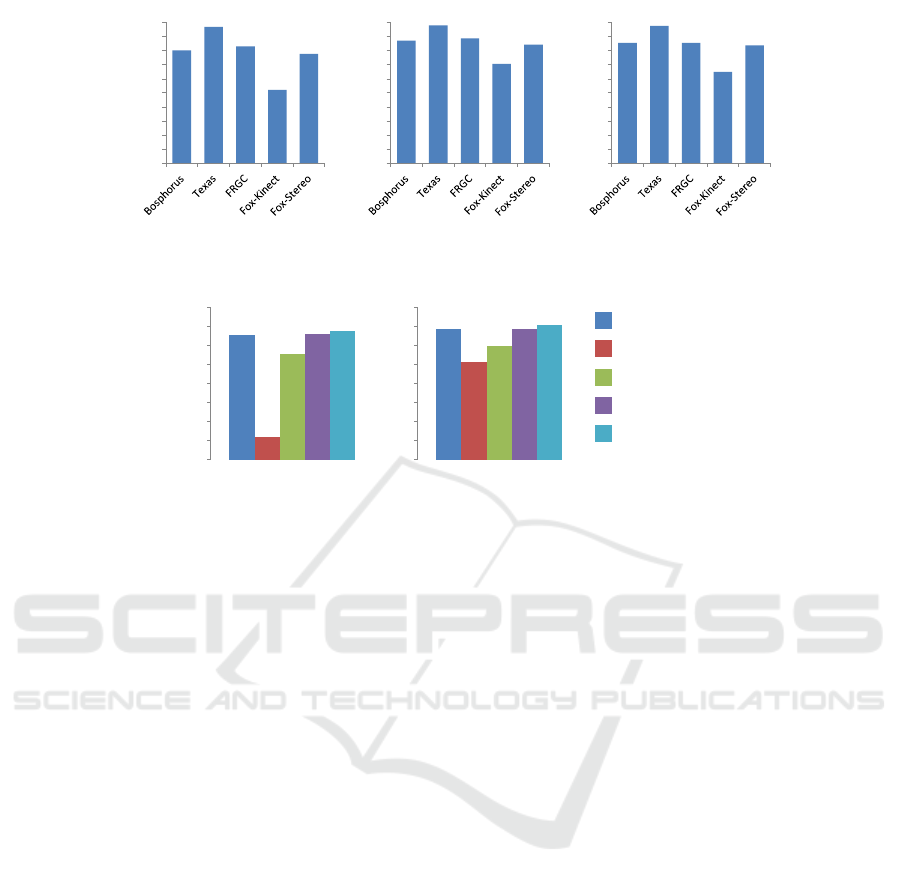
In order to quantify the challenges brought by the
new dataset, we compare in Fig 4, the face recog-
nition rates obtained by applying some descriptors
(LBP, DLBP and 3DLBP (Huang et al., 2006)) on 3D
data from our dataset to those obtained on other well-
known 3D datasets (FRGC, TEXAS and Bosphorus)
(Aissaoui et al., 2014). Descriptor’s parameters given
the best rates are chosen. The recognition is per-
formed using 1NN method with 10-cross validation.
The obtained results show that with this frame-
work, comparing to other state of the art datasets, the
new dataset is more challenging.
Figure 5 shows results obtained by the bi-
modal framework (DLBP for depth images and LBP
for grey-level images) applied on Foxkinect and
FoxStereo data. Recognition is performed using SVM
classification scheme with an RBF kernel. The well-
used SVM is used in order to provide overall com-
parisons metrics between various approaches on the
present dataset. Experiments include mono-modal
(2D and 3D) and bimodal methods employing vari-
ous fusion strategies(early, late and bi-level fusion).
Early fusion does not seems to increase the perfor-
mances, probably due to noise brought by each fea-
ture, but also, to the different nature of the informa-
tion characterized by features (depth and texture). De-
cision fusion appears more efficient as the used classi-
fier seem to manage better noise and variations when
only one feature-type is considered. The bi-level fu-
sion, which combines 2D, 3D and early fusion deci-
sions, proves to be better than the three other strate-
gies used separately.
5 CONCLUSION
In this paper, we described a new collection for evalu-
ating algorithms on face recognition. The constructed
collection aims to offer a rich evaluation resource
for researchers in face identification using different
modalities. It contains static (images) and dynamic
(videos) acquisitions, using 2D, 3D and stereo modal-
ities. The used equipments offer a depth acquisition
with less constraints in terms of cost and time, com-
paring to the 3D scanners. The available data in this
collection allows the evaluation of algorithms in a
large range of research fields in particular:
2D, 3D and Bimodal Face Recognition: color
images can be used in the conventional 2D face recog-
nition. Depth images can be used to evaluate al-
gorithms of 3D face recognition. They can also be
combined with 2D images to be used in a bimodal
recognition context. The recognition can be evaluated
across changes in pose, expression and illumination.
3D Face Reconstruction: the stereo pairs can be
used in order to estimate depth maps of the face us-
ing stereo-based reconstruction algorithms. 3D face
model reconstruction algorithms based on combining
depth maps captured from different point of views can
also be applied on this dataset.
Facial Expressions Recognition: Different ex-
pression for each identity are acquired in the collec-
tion. Facial expression recognition methods, in 2D,
3D or 2D-3D, can be evaluated using our collection.
Head Pose Estimation: the collection is rich in
term of changes in pose. Faces are captured under
30 different pose. Hence, the collection can be very
useful for 2D, 3D and bimodal head pose estimation.
Face Detection: the annotation information can
be used for evaluating face and fiducial points (eyes,
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
536
0
10
20
30
40
50
60
70
80
90
100
Recognition rate (%)
LBP
0
10
20
30
40
50
60
70
80
90
100
Recognition rate (%)
3DLBP
0
10
20
30
40
50
60
70
80
90
100
Recognition rate (%)
DLBP
Figure 4: Comparing the new dataset to state-of-the-art datasets using 3 different descriptors and 1NN method.
84
86
88
90
92
94
96
98
100
Recognition rate (%)
FoxKinect
84
86
88
90
92
94
96
98
100
Recognition rate (%)
FoxStereo
Monomodal (depth)
Early fusion (descriptors)
Late fusion (decisions)
Bi-level fusion
Monomodal (2D)
Figure 5: Performances of monomodal methods (2D, depth/3D) and bimodal methods with various fusion strategies on
FoxKinect and FoxStereo.
nose and mouth) detection methods in both 2D and
3D modalities.
Dynamic Face Analysis: A latest interest in face
analysis consists in using time dimension for identifi-
cation and expressions recognition. Videos available
in our collection (2D and 3D) can be very useful for
this areas of research.
Experiments conducted here give an example of
using a partition of the dataset in a frontal face recog-
nition context. However, our dataset is available for
researchers in other related research fields.
REFERENCES
Aissaoui, A. and Martinet, J. (2015). Bimodal 2d-3d face
recognition using a two-stage fusion strategy. 5th In-
ternational Conference on Image Processing Theory,
Tools and Applications (IPTA 2015), pages p. 279–
284.
Aissaoui, A., Martinet, J., and Djeraba, C. (2014). DLBP:
A novel descriptor for depth image based face recog-
nition. In Proceedings of the 21th IEEE international
conference on Image processing, pages 298–302.
Fanelli, G., Dantone, M., Gall, J., Fossati, A., and Van Gool,
L. (2013). Random forests for real time 3d face anal-
ysis. Int. J. Comput. Vision, 101(3):437–458.
Gupta, S., Markey, M. K., Castleman, K. R., and Bovik,
A. C. (2010). Texas 3D face recognition database.
IEEE SSIAI, pages 97–100.
Huang, Y., Wang, Y., and Tan, T. (2006). Combining statis-
tics of geometrical and correlative features for 3D face
recognition. In Proceedings of the British Machine Vi-
sion Conference, pages 879–888.
Min, R., Kose, N., and Dugelay, J.-L. (2014). Kinect-
facedb: A kinect database for face recognition. Sys-
tems, Man, and Cybernetics: Systems, IEEE Transac-
tions on, 44(11):1534–1548.
Phillips, P. J., Flynn, P. J., Scruggs, T., Bowyer, K. W.,
Chang, J., Hoffman, K., Marques, J., Min, J., and
Worek, W. (2005). Overview of the face recognition
grand challenge. In Proceedings of CVPR’05, pages
947–954.
Savran, A., Aly
¨
uz, N., Dibeklio
˘
glu, H., C¸ eliktutan, O.,
G
¨
okberk, B., Sankur, B., and Akarun, L. (2008). Bio-
metrics and identity management. chapter Bospho-
rus Database for 3D Face Analysis, pages 47–56.
Springer-Verlag, Berlin, Heidelberg.
Yin, L., Chen, X., Sun, Y., Worm, T., and Reale, M.
(2008). A high-resolution 3d dynamic facial expres-
sion database. In 8th IEEE Intl. Conf. on Automatic
Face and Gesture Recognition (FG 2008), Amster-
dam, The Netherlands, pages 1–6.
Yin, L., Wei, X., Sun, Y., Wang, J., and Rosato, M. J.
(2006). A 3d facial expression database for facial be-
havior research. In Automatic face and gesture recog-
nition, 2006. FGR 2006. 7th international conference
on, pages 211–216. IEEE.
Introducing FoxFaces: A 3-in-1 Head Dataset
537
