
Facial Emotion Recognition from Kinect Data – An Appraisal of Kinect
Face Tracking Library
Tanwi Mallick, Palash Goyal, Partha Pratim Das and Arun Kumar Majumdar
Department of Computer Science and Engineering, Indian Institute of Technology, Kharagpur, 721302, India
Keywords:
Facial Expression Recognition, Emotion Recognition, Kinect Face Tracking Library (KFTL), Facial Action
Coding System (FACS), Action Units (AU), Artificial Neural Network (ANN).
Abstract:
Facial expression classification and emotion recognition from gray-scale or colour images or videos have been
extensively explored over the last two decades. In this paper we address the emotion recognition problem using
Kinect 1.0 data and the Kinect Face Tracking Library (KFTL). A generative approach based on facial muscle
movements is used to classify emotions. We detect various Action Units (AUs) of the face from the feature
points extracted by KFTL and then recognize emotions by Artificial Neural Networks (ANNs) based on the
detected AUs. We use six emotions, namely, Happiness, Sadness, Fear, Anger, Surprise and Neutral for our
work and appraise the strengths and weaknesses of KFTL in terms of feature extraction, AU computations,
and emotion detection. We compare our work with earlier studies on emotion recognition from Kinect 1.0
data.
1 INTRODUCTION
Facial emotions represent an important aspect of hu-
man communication, particularly in conveying the
mental state of an individual. The ability to automati-
cally recognize facial emotion is useful for Human-
Computer Interaction (HCI). Potential applications
include (Kołakowska et al., 2013) video games, ed-
ucational software, auto-mobile safety, mental health
monitoring and many others.
In order to solve this problem, researchers use
different techniques to detect face and then extract
features of various expressions that build emotions.
These techniques (Section 2, Table 1) are mainly
based on the color, shape and motion of the face and
facial points like eyes, eye-brows, nose, cheek, and
lips. It has been customary to use gray-scale and
colour intensity information in images and videos to
recognize facial emotions. Though depth data have
been available for nearly a decade, there is no reported
work on this till 2013.
In this paper we use Kinect
1
1.0 for recogniz-
ing emotions. Besides capturing depth, it also pro-
vides the Kinect Face Tracking Library (Microsoft,
2014) (KFTL) with capabilities for basic feature ex-
traction and tracking of faces. In 2013, some work
1
Kinect for XBox One has been released a while after
this work was completed. This is called Kinect 2.0 now.
((Youssef et al., 2013), (Wyrembelski, 2013), (Nel-
son, 2013)) have been reported on emotion recogni-
tion from Kinect data. We build up on these with the
specific target of appraising the performance of KFTL
for effective use in emotion recognition.
We capture facial emotion images by Kinect 1.0
and use KFTL to detect and track the face, and
to extract its basic features (like face points). We
then compute various Action Units (AUs) of the
face. Finally we use the well-accepted Candide-3
FACS (Link
¨
oping, 2012) model to recognize emo-
tions by Artificial Neural Networks (ANNs). We
use six emotions – Happiness, Sadness, Fear, Anger,
Surprise and Neutral for our work and appraise the
strengths and weaknesses of the KFTL in terms of
feature extraction, AU computations, and emotion de-
tection.
The remainder of the paper is organized as fol-
lows. Section 2 gives an overview of the state of
the art techniques for recognizing emotions. In Sec-
tion 3 we describe the Candide-3 FACS (Link
¨
oping,
2012) emotion model. A brief description of Kinect
Face Tracking Library is given in Section 4. Section 5
describes the architecture of the emotion recognition
system. Then in Sections 6 and 7 we discuss its stages
in depth. We present the results in Section 8. Finally
we conclude in Section 9.
Mallick, T., Goyal, P., Das, P. and Majumdar, A.
Facial Emotion Recognition from Kinect Data â
˘
A ¸S An Appraisal of Kinect Face Tracking Library.
DOI: 10.5220/0005713405250532
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 4: VISAPP, pages 525-532
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
525

Table 1: Chronological Survey of Work in Emotion Recognition.
Ref. (Year) Input Output Remarks
(Essa and Pentland, 1997) Gray-
Scale
(UE) w/o Fear w/
Raise Brow
Features are extracted by motion-based dynamic model using optical flow. Clas-
sification is done using 2D motion energy model.
(Yoneyama et al., 1997) Gray-
Scale
(UE) w/o Fear &
Disgust
Optical flow are measured in partitions of face and then a discrete Hopfield NN is
used for classification.
(Black and Yacoob, 1995) Gray-
Scale
(UE) Local parametric motion feature are used for classification.
(Cohn et al., 1998) Gray-
Scale
(UE) Optical flow for selected facial points are used as features.
(Yang et al., 1999) RGB (UE) Fuzzy rule-based classifier is used to recognize emotions from deformation of 18
feature points wrt neutral face.
(Tsapatsoulis and Piat, 2000) MPEG-4
Video
(UE) w/o Fear w/
Raise Brow
Scale invariant distances of 15 salient points are detected on face for each emotion
and a fuzzy classifier is used for classification.
(Tian et al., 2001) RGB Action Units Tracks feature points on face based color, shape and motion to compute AUs.
These can be used for emotion analysis.
(Cohen et al., 2003) Video (UE) w/ Neutral Uses wire-frame model and facial motion measurements for feature extraction.
HMM and Bayesian classifiers are used for classification.
(Kim and Bien, 2003) RGB (UE) Skin-colour segmentation and T-based template matching are used for detecting
face and extracting features. A fuzzy NN is used for classification.
(Kim et al., 2005) RGB (UE) w/o Fear Features are extracted by using fuzzy color filter, virtual face model and histogram
analysis. Then fuzzy classifier is used for classification.
(Pantic and Patras, 2006) Video 27 Action Units Shape and location-based feature points are tracked using particle filters. It can
handle temporal dynamics of AUs.
(Youssef et al., 2013) Kinect
Data
(UE) w/ Neutral Based on 121 3D points and their deformation, emotions are classified by SVM
and k-NN classifiers.
(Wyrembelski, 2013) Kinect
Data
(UE) w/o Fear &
Disgust
Based on AUs from KFTP (Microsoft, 2014) the emotions are classified by k-NN
classifiers.
(Nelson, 2013) Kinect
Data
Assorted Emo-
tions
Based on AUs from KFTP (Microsoft, 2014) six emotions – Surprise, Sad, Kiss-
ing, Smiling, and Anger w/ Mouth open & closed – are classified by decision
tree.
Set of Universal Emotions (UE) (Hung et al., 1996) include – Fear, Surprise, Anger, Disgust, Happiness, and Sadness. In addition, Smile and Raise
Brow are used by some researchers.
2 SURVEY OF FACIAL EMOTION
RECOGNITION
Though there have been sporadic interests in mod-
elling facial emotions (Ekman and Friesen, 1978) and
their constituent expressions from the 1970’s, seri-
ous research in computer analysis and synthesis of
facial emotions started in the mid-1990’s. Initially it
used gray-scale images and later grew with colour im-
ages and video sequences. Recently some researchers
((Youssef et al., 2013), (Wyrembelski, 2013), (Nel-
son, 2013)), like ours, have attempted to use depth
and RGB data from Kinect data for this purpose.
Based on the set of features the work in emotion
recognition has been broadly divided into three cate-
gories (Wu et al., 2012). We briefly review these be-
low and in Table 1 present a chronological survey of
some representative work in this area since 1995.
• Deformation Features: In these methods ((Yang
et al., 1999), (Youssef et al., 2013), (Wyrembelski,
2013), (Nelson, 2013)) some facial deformation
information like Geometric deformation or Tex-
ture changes caused by the changing expressions
are extracted. The techniques based on Candide-3
FACS Model (Link
¨
oping, 2012) fall in this cate-
gory as Action Units are estimated based on defor-
mations from the neutral face under an emotion.
• Motion Features: These methods ((Essa and Pent-
land, 1997), (Yoneyama et al., 1997), (Black and
Yacoob, 1995), (Cohn et al., 1998), (Tian et al.,
2001), (Cohen et al., 2003)) use sequential ex-
pression images and extract some feature points
or motion information from the regions of the fea-
tures. Common methods include: Feature point
tracking and Optical flow.
• Statistical Features: In these methods ((Tsapat-
soulis and Piat, 2000), (Pantic and Patras, 2006),
(Kim and Bien, 2003), (Kim et al., 2005)) the
characteristics of emotion are described by typi-
cal statistics – Histogram or Moment Invariant.
The classification algorithms are chosen based on
the extracted features. These include Artificial Neu-
ral Network (ANN), Support Vector Machine (SVM),
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
526
k-Nearest-Neighbor (kNN), Bayes’ Classifiers, Fuzzy
Rule-Based Classifier, Fuzzy Neural Network (FNN),
Hidden Markov Model (HMM), Spatial and Temporal
Motion Energy Templates Methods. However, in re-
cent years, HMM, ANN, Bayesian classification, and
SVM have become the mainstream methods for facial
emotion recognition.
In the next section we review the work with Kinect
in depth.
2.1 Facial Emotion Recognition from
Kinect Data
Recently some studies / systems have been reported
on facial expression recognition that use Kinect depth
(as well as RGB) data.
Youssef et. al. (Youssef et al., 2013) use Kinect
depth video with SVM & kNN for detecting Autism
Spectrum Disorders (ASDs) in children. They con-
sider six universal emotions and report the best recog-
nition rate of 39% with SVM. In (Wyrembelski,
2013), Wyrembelski report an Emotion Recognition
System using Kinect data with kNN classifier. The
AUs from KFTL are used here as features. Nelson, in
her thesis (Nelson, 2013), presents an emotion recog-
nition system for six emotions. Unlike the usual prac-
tice of using the universal emotions, Nelson uses a
different set – Surprise, Sadness, Kissing, Smiling,
Anger with mouth open, and Anger with mouth closed.
Again the AUs from KFTL are used as features and
the classification is done by a decision tree. However,
no data on test or accuracy is reported in (Wyrembel-
ski, 2013) and (Nelson, 2013).
We use AUs in this work. So our approach belongs
to Deformation Features category. We use KFTL for
early processing, and ANNs to recognize AUs and fi-
nally the emotions. Before discussing our approach,
we briefly present the FACS model and KFTL in the
next two sections.
3 FACIAL EMOTION
MODELLING
The formations and transitions of facial expressions
and the ensuing emotions were first encoded in (Ek-
man and Friesen, 1978) by Ekman and Friesen in
1978. Realizing that facial expressions are resultant
of combined contractions and relaxations of various
facial muscles, they worked on a system to systemat-
ically encode the same and relate muscles to move-
ments (Table 2). Since the muscle movements behind
every expression gets too detailed, they defined Ac-
tion Units (AUs) as combinations of groups of mus-
cles (Figure 1) that cause constituent movement be-
haviour for various expressions. They called it the
Facial Action Coding System (FACS) (Ekman and
Friesen, 1978). It has now become the de-facto stan-
dard (Mellon University, 2015) in describing facial
behaviours.
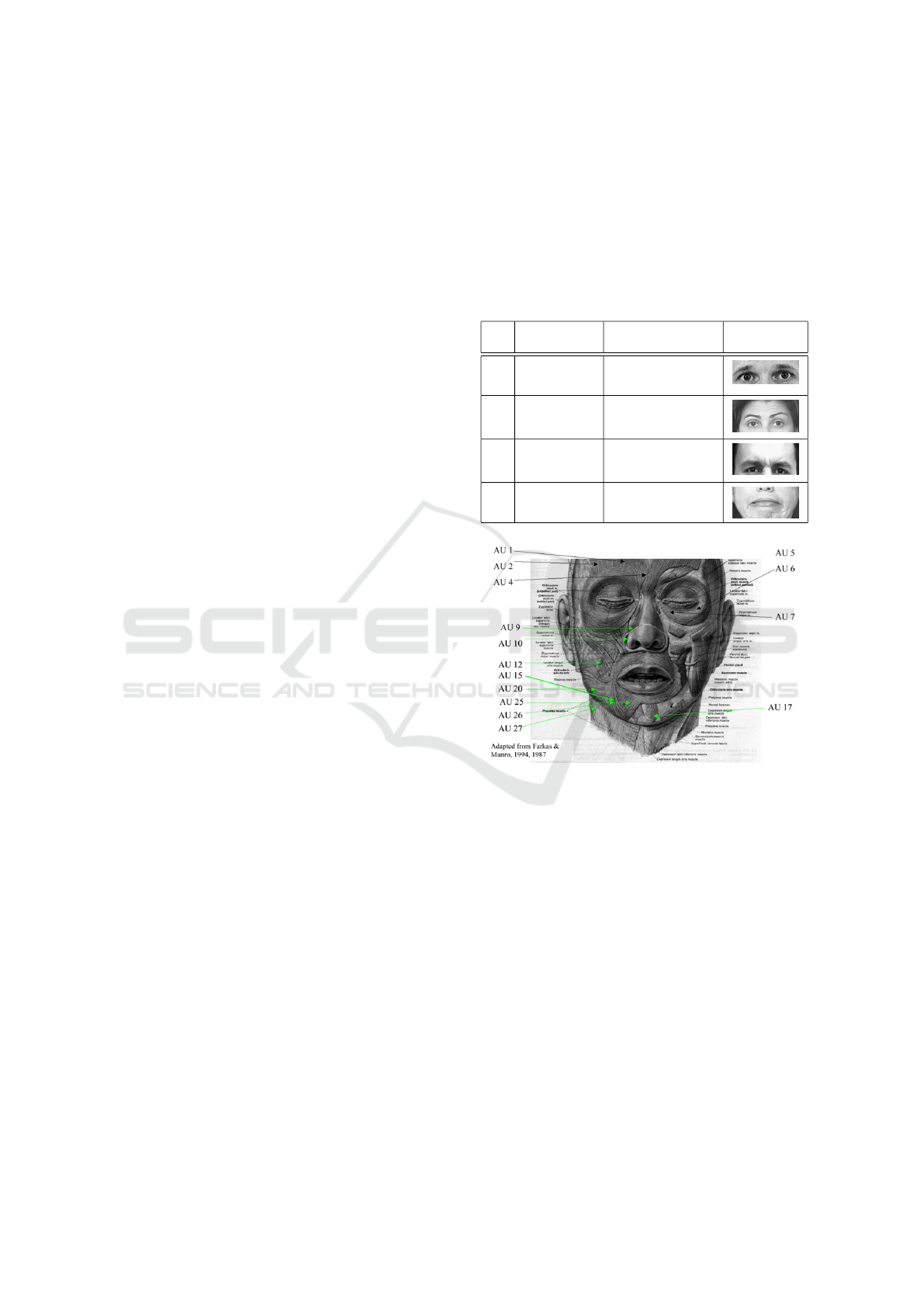
Table 2: Action units in terms of Facial muscles.
AU Description Facial muscle Example im-
age
1 Inner Brow
Raiser
Frontalis, pars medialis
2 Outer Brow
Raiser
Outer Brow Raiser
4 Brow Lowerer Corrugator supercilii,
Depressor supercilii
20 Lip stretcher Risorius with platysma
Figure 1: Selected FACS Action Units.
FACS encodes an emotion as a combination of
AUs. For example, happiness is described by AU6
(Cheek Raiser) and AU12 (Lip Corner Puller). Dura-
tion, intensity, and asymmetry also add to the forma-
tion of emotions. In Table 3 we list the AU composi-
tions for emotions that we consider in this paper.
FACS finds extensive use in synthesizing emo-
tions while various computer animation techniques
for ascribing emotions to avatars are worked out.
The most accepted form of FACS is implemented
as Candide-3 model (Link
¨
oping, 2012) where there
are 44 AUs. Like many RGB-based techniques men-
tioned above, we also use the AUs defined in Candide-
3 to model the face and to recognize emotions in terms
of AUs. Unless otherwise mentioned the AU numbers
in this paper refer to the common FACS scheme (Mel-
lon University, 2015).
Facial Emotion Recognition from Kinect Data â
˘
A¸S An Appraisal of Kinect Face Tracking Library
527
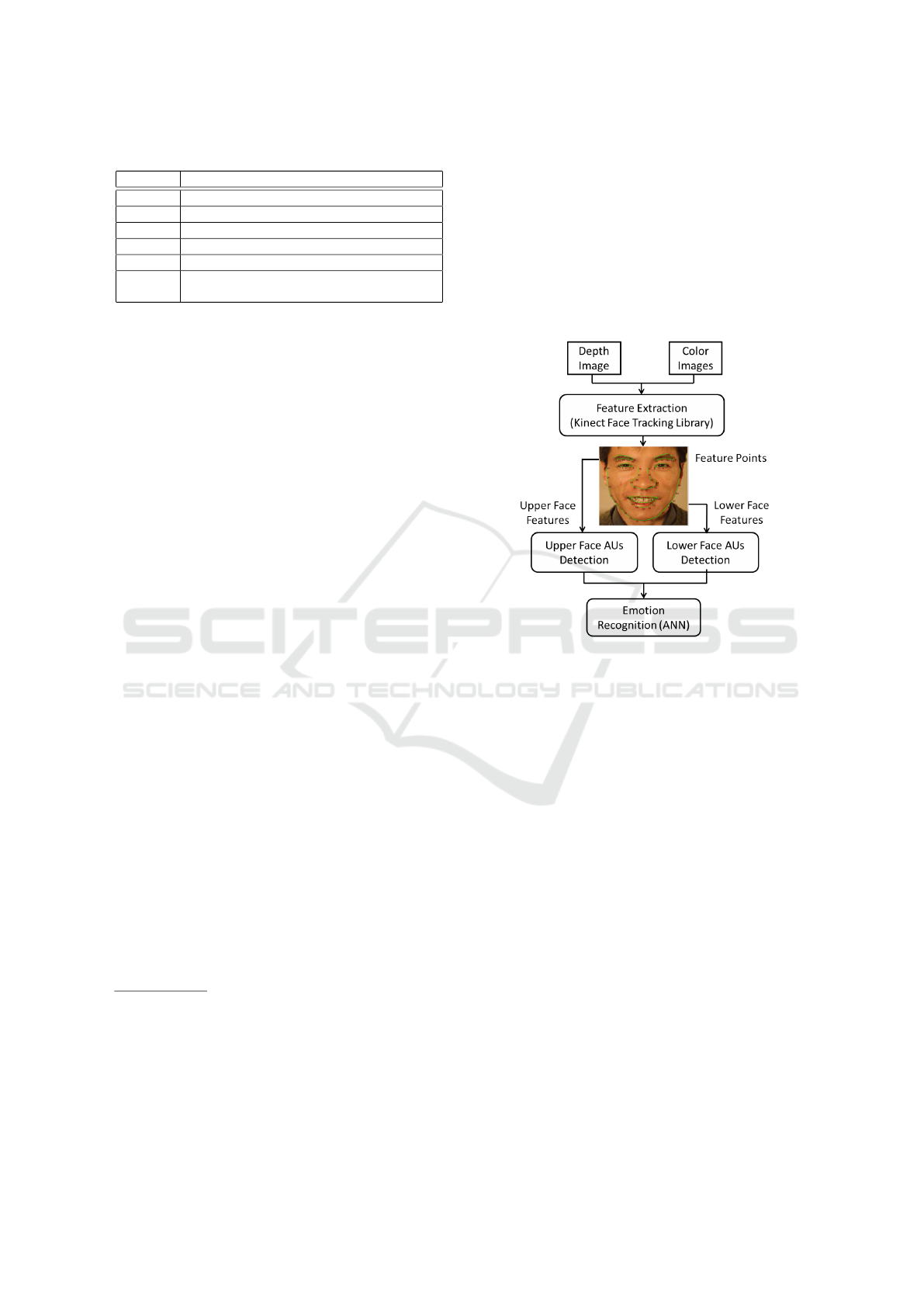
Table 3: Composition of Emotions in terms of Action Units.
Emotion Component AUs
Happiness AU6, AU12
Surprise AU1, AU2, AU5, AU10
Sadness AU1, AU4, AU15
Fear AU1, AU2, AU4, AU5, AU10, AU20
Anger AU4, AU5, AU23
Neutral AU1, AU2, AU4, AU5, AU6, AU10, AU12, AU23,
AU26
This table is derived from the emotion coding in FACS (Mellon Univer-
sity, 2015) and uses the same AU numbers.
4 KINECT FACE TRACKING
LIBRARY (KFTL)
We intend to use KFTL
2
(Microsoft, 2014) to detect
and track a face, and extract its features. KFTL takes
depth and RGB frames as input and tracks the human
face to compute the following:
1. Tracking Status: It outputs the status to indicate if
face tracking is successful or if it has failed and its
reason.
2. 2D Tracked Points: It tracks the 100 2D points
on the face including a bounding rectangle around
the head. These points are returned in an array and
are defined in the coordinate space of the RGB
image (in 640 x 480 resolution) returned from the
Kinect sensor. These are used as Feature Points
(Figure 2).
3. 3D Head Pose: It captures the pose of the head by
three angles – Pitch, Roll, and Yaw. These repre-
sent the 3D orientation of the head. The tracking
works when the pitch, roll, and yaw angles are less
than 20
o
, 90
o
, and 45
o
respectively.
4. Action Units (AUs): It outputs the weights of 6
AU
3
s from Candide-3 model (Link
¨
oping, 2012).
5. Shape Units (SUs): It return 11 SU
4
s that are re-
lated to the Candide-3 model (Link
¨
oping, 2012).
2
Kinect Windows SDK version 1.7
3
In SDK these are referred to as Animation Units. These
are deltas from the neutral shape that can be used to morph
targets on animated avatar models so that the avatar acts as
the tracked user does.
4
The SUs estimate the particular shape of the user’s
head: the neutral position of their mouth, brows, eyes, and
so on.
5 EMOTION RECOGNITION
SYSTEM
In this paper, we describe a multi-stage emotion
recognition system for near-frontal faces. The archi-
tecture of the system is shown in Figure 2. An auto-
mated emotion recognition system first needs to ex-
tract facial features and then recognise emotions in
terms of these features. Hence we architect our sys-
tem in three stages:
Figure 2: Architecture of emotion recognition system.
1. Feature Extraction using KFTL: KFTL takes
depth and RGB images as input and tracks 100
2D points on the human face. Various features
like eye-width, eye-height, distance between lips
etc. are extracted from these tracked points and /
or taken from SUs (Section 4). These (local) fea-
tures are used in the next stage of the system for
detection of AUs.
2. Detection of Action Units: AUs are defined in
terms of local features of the face. Hence we use
the extracted features to detect various AUs. This
is done by Decision Algorithms and ANN classi-
fiers as discussed in Section 6.
3. Emotion Recognition: Finally, we use Candide-3
emotion model to recognise target emotions from
AUs detected above. This is done by ANN classi-
fiers and is detailed in Section 7.
6 DETECTION OF ACTION
UNITS
Initially we attempt to use the Kinect AUs (Section 4)
as detected by KFTL for our system. Hence we per-
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
528
form experiments to evaluate them. The AUs as de-
tected by KFTL for our data set, are tabulated in Ta-
ble 4 as fraction of total samples. We note that for
most AUs the detection rate is rather poor. No AU,
with the exception of Neutral, is detected with even
40% accuracy and therefore cannot be used to reli-
ably recognize emotions. Further, KFTL detects only
6 AUs. Hence we fail to build our system using Kinect
AUs.
Table 4: Confusion Matrix for Detection of Kinect AUs us-
ing SDK.
Detected AUs
Actual AUs Neutral AU0 AU1 AU3 AU4 AU5
Neutral 0.67 0.10 0.23 0.00 0.00 0.00
AU0 (AU10) 0.14 0.36 0.11 0.07 0.20 0.12
AU1 (AU26/27) 0.17 0.05 0.21 0.12 0.18 0.27
AU3 (AU4) 0.02 0.08 0.30 0.13 0.09 0.20
AU4 (AU13/15) 0.28 0.09 0.14 0.08 0.34 0.07
AU5 (AU2) 0.14 0.13 0.18 0.11 0.18 0.26
AU numbers shown here are from KFTL. The corresponding AU numbers
from Candide-3 model are shown within parentheses. In KFTL, Neutral face
is detected when all AUs are 0. AU2 (AU20 - Lip Stretcher) has not been
considered in the experiment.
Next we focus to design our own algorithms to de-
tect AUs from KFTL feature points. Fortunately, the
2D tracked or feature points from KFTL are found
to be moderately accurate. Various features like eye-
width, eye-height, distance between lips etc. can be
reliably extracted from these tracked points. As some
of the features like eye-height and lip-width differ
across people, we normalize these features by the fea-
tures of the neutral face. These features are then used
along with the annotated frames in the detection pro-
cess.
We also notice that the AUs in the upper and
lower face are relatively independent and they behave
in distinct ways. Hence, we use different algorithms
for the detection of upper and lower face AUs. These
algorithms are discussed in the next two sections.
6.0.1 Detection of Upper Face AUs
Each upper face AU (like AU1, AU2, AU4, AU5, and
AU6) is a monotonic function of a single feature. For
example, upper lid raiser is generally accompanied
by brow raiser which leads to giving brow to lower
eye lid distance a reasonably high weight. Hence, we
use a function X
MAX
(x value for which y is maximum)
as a monotonic functions for recognising the upper
face AUs. The features, as used, are shown in Table 5.
Table 5: Features for Upper Face AUs.
Action Unit Feature Lower Upper
limit limit
AU1 (Inner brow raiser) Inner brow to eye 1.000 1.270
AU2 (Outer brow raiser) Outer brow to eye 1.000 1.220
AU4 (Brow lowerer) (Inner brow to eye)
−1
1.000 1.200
AU5 (Upper lid raiser) Eye height 1.000 1.235
AU6 (Cheek raiser) (Eye height)
−1
1.000 1.950
This table uses AU numbers from FACS (Mellon University, 2015)
6.0.2 Detection of Lower Face AUs
Lower face AUs (like AU12, AU15, AU20, and
AU23) are non-monotonic in terms of the feature
points. Hence we use an ANN to recognize 4 lower
face AUs. The input and output layers for the ANN
are set as:
• Input layer:
– Lip width / Neutral lip width,
– Lip height / Neutral lip height, and
– Lip angle (Angle between lines joining end
points of lip to mid-point of lower lip) / Neu-
tral lip angle.
• Output layer:
– AU12 (Lip Corner Puller),
– AU15 (Lip Corner Depressor),
– AU20 (Lip Stretcher), and
– AU23 (Lip Tightener)
• Hidden layer: 1 hidden layer with 6 neurons
• Steepness of activation function: 0.01
Results for the detection of AUs are given in Ta-
bles 6 and 7 in Section 8.2.
7 EMOTION RECOGNITION
After extracting the AUs, we use ANNs to learn Emo-
tions from AUs in the input layer. We do this in two
ways:
1. Multiple Neural Networks: We build 6 ANNs, one
for each emotion having suitable AUs in the input
layer. For example for Happiness the ANN is:
• Input layer:
– AU6 (Cheek raiser)
– AU12 (Lip Corner Puller)
• Output layer:
– Happiness
• Hidden layer: 1 hidden layer with 6 neurons
• Steepness of activation function: 0.01
Facial Emotion Recognition from Kinect Data â
˘
A¸S An Appraisal of Kinect Face Tracking Library
529
This approach has the advantage that unnecessary
weights to some of the AUs is avoided.
2. Single Neural Networks: We build a single ANN
with the input layer consisting of all the AUs and
the output layer containing all the emotions. we
use 1 hidden layer with 6 neurons and steepness of
0.01 for activation function. This approach has the
advantage that it removes the subjectivity. It may
be difficult to predict the dependence between in-
dividual emotions and the AUs making this ap-
proach more robust.
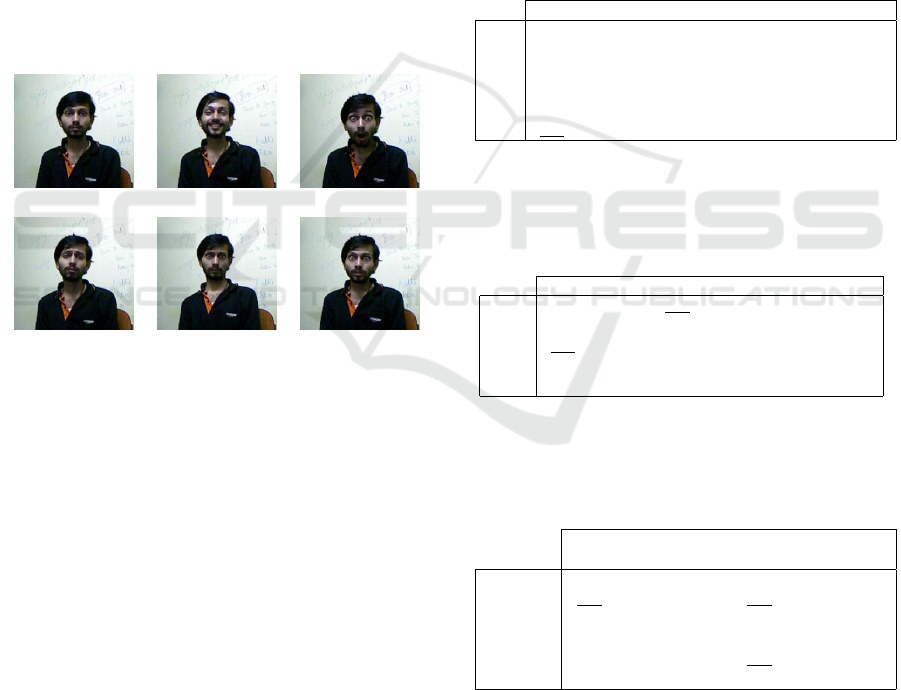
8 EXPERIMENTS AND RESULTS
We investigate the effectiveness of our framework
using six emotions: Happiness, Sadness, Surprise,
Fear, Anger, and Neutral. Figure 3 shows sample im-
ages as captured by Kinect.
(a) Neutral (b) Happiness (c) Surprise
(d) Sadness (e) Fear (f) Anger
Figure 3: Six Emotions used in our work.
8.1 Data Set
There is no benchmark available for facial expres-
sion classification experiments based on depth data
of faces. Hence, we first generated a data set that
can be used for training as well as testing. 25 vol-
unteers participated in data generation. About 4 min-
utes’ video was recorded for each volunteer. This
comprised about 6000 to 7000 image frames. 10 out
of the 25 volunteers are drama actors and each of them
enacted the target emotions twice. In addition, all
volunteers were asked to perform some of the Action
Units. Nearly equal number of frames of all the emo-
tions were obtained to avoid any bias.
8.2 Results
We use 80% of the data to train the system and 20%
to test for detection of AUs as well as emotion recog-
nition. An open-source library FANN (Fast Artificial
Neural Network) (Nissen, 2014) is used for learning
the ANNs. First, we detect the upper and lower face
AUs from the facial features. Tables 6 and 7 show
the results of the AUs detection. After extracting the
AUs, we use the data to recognize emotion using mul-
tiple and single ANNs. The results are shown in Ta-
bles 8 and 9. Bold entries along the diagonal of the
table show correct recognition rate while underlined
entries off-diagonal show misclassification rate.
Table 6: Confusion Matrix for Detection of Upper-Face
AUs.
AU0 AU1 AU2 AU4 AU5 AU6
AU0 0.67 0.10 0.23 0.00 0.00 0.00
AU1 0.14 0.86 0.00 0.00 0.00 0.00
AU2 0.17 0.00 0.83 0.00 0.00 0.00
AU4 0.26 0.00 0.00 0.74 0.00 0.00
AU5 0.14 0.00 0.00 0.00 0.86 0.00
AU6 0.63 0.00 0.00 0.00 0.00 0.37
This table uses AU numbers from FACS (Mellon University, 2015). AU0
denotes Neutral Face. Note that AU6 (Cheek raiser) is grossly misclas-
sified as Neutral face.
Table 7: Confusion Matrix for Detection of Lower-Face
AUs.
AU0 AU12 AU15 AU20 AU23
AU0 0.49 0.04 0.44 0.03 0.00
AU12 0.02 0.76 0.01 0.21 0.00
AU15 0.50 0.02 0.46 0.02 0.00
AU20 0.01 0.16 0.03 0.80 0.00
AU23 0.00 0.00 0.00 0.00 1.00
This table uses AU numbers from FACS (Mellon University, 2015).
AU0 denotes Neutral Face. Note that AU15 (Lip Corner Depressor)
is often confused with Neutral face.
Table 8: Confusion Matrix for Emotion Recognition using
Multiple ANNs.
Neu- Happi- Sur- Sad- Fear Anger
tral ness prise ness
Neutral 0.76 0.00 0.00 0.15 0.07 0.02
Happiness 0.30 0.20 0.01 0.31 0.08 0.10
Surprise 0.01 0.00 0.88 0.01 0.08 0.02
Sadness 0.10 0.04 0.00 0.84 0.01 0.01
Fear 0.10 0.00 0.06 0.54 0.20 0.10
Anger 0.03 0.02 0.10 0.02 0.12 0.71
Note that Fear is often misclassified as Sadness and Happiness is
confused with Sadness or Neutral emotion. These are due to the
weak discrimination of AU6 (Table 6) and AU15 (Table 7).
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
530

Table 9: Confusion Matrix for Emotion Recognition using
a Single ANN.
Neu- Happi- Sur- Sad- Fear Anger
tral ness prise ness
Neutral 0.64 0.12 0.00 0.15 0.07 0.02
Happiness 0.25 0.40 0.01 0.21 0.08 0.05
Surprise 0.03 0.04 0.81 0.01 0.08 0.02
Sadness 0.10 0.06 0.00 0.82 0.01 0.01
Fear 0.14 0.00 0.01 0.59 0.14 0.12
Anger 0.02 0.01 0.10 0.02 0.12 0.74
The recognition of Happiness improves over the multiple ANN model
(Table 8), but Fear still behaves poorly.
8.3 Discussion
Using Multiple ANN approach, Fear is frequently
misclassified as Sadness, Happiness as Neutral or
Sadness (Tables 8). The use of Single ANN does not
significantly increase the overall accuracy of the sys-
tem, although the happiness categorization improves
somewhat.
The recognition accuracies of Happiness and Fear
are not satisfactory. Figures 3(b) and 3(d) are both
being recognized as Sad. The reason for inaccurate
recognition of Happiness is the inaccuracy in Cheek
Raiser detection. As for detection of Fear, the lip
movements involved in fear are not the typical lip
stretch (AU20). Furthermore, Kinect 1.0 is unable to
track the lip points corresponding to Fear. It loses
track of end points which leads to erroneous output.
The reader might think that variation in eye features
should be enough to detect Fear but the variations are
subtle which Kinect 1.0 is unable to capture.
We analyze the 2D points as extracted by KFTL
(and the corresponding RGB image, for visual under-
standing) to get insight of why Fear and Happiness
are not properly recognized. A close look at the data
reveals that the lip points are often falsely tracked,
that is, Kinect is unable to track the lip points when
the emotional state of the person is Fear. Also we
see that the eyes are not tracked properly. This is
due to the significant distortion of lips and eyes. With
this the Active Appearance Model (AAM) that Kinect
uses, is unable to form a suitable mesh. Improving
the resolution or using another algorithm for tracking
points may solve the problem.
9 CONCLUSION
We present a facial emotion recognition system using
Kinect 1.0 data and the KFTL. We use the Candide-
3 FACS model (Link
¨
oping, 2012) for this work and
achieve the tasks in three stages: Feature extraction,
AUs detection and Emotion recognition. We use
KFTL for feature extraction. Next we detect the AUs.
For this we first tried to use KFTL but failed. So we
define AUs in terms of local features of the face and
develop algorithms to detect AUs separately in upper
and lower face regions. We attempt to detect 10 AUs
of which 8 are detected accurately. But the detections
of AU6 (Cheek Raiser) & AU15 (Lip Corner Depres-
sor) have been poor. Finally, we use the detected AUs
to recognise six emotions. This is done by multiple
as well as single ANN classifiers. Single ANN be-
haves better, though the recognition rates of Fear and
Happiness are unsatisfactory.
In the course of this work we observe the follow-
ing characteristics of the KFTL:
• As such KFTL is inadequate for emotion recogni-
tion as it detects only 6 AUs. Also, some of the
AUs as detected by KFTL are unstable.
• 2D Points as detected are accurate and stable.
• Some other extracted parameters are unstable.
• Some typical key information (like iris) are not
available.
The performance of our system compares
favourably with earlier work with Kinect data.
Compared to the 39% accuracy reported by Youssef
et. al. (Youssef et al., 2013), our system achieves an
accuracy of 40% or more for five out of six emotions
(excluding Fear), and over 64% for four of them
(further excluding Happiness). While we also use
KFTL as in (Wyrembelski, 2013) and (Nelson, 2013),
our own detectors for AUs and ANN-based classifiers
perform better than other methods. Interestingly,
in (Nelson, 2013), Nelson suggests
5
that more
specific bounds for facial expressions and neural
networks be used for improvement of KFTL. Our
work with detection of AUs (specifically in lower
face) already implements this and experimentally
supports this observation.
We thus conclude that better accuracy of emo-
tion recognition cannot be achieved with the current
Kinect library. Specifically, the tracking of lip points
and the lowering of eyes – critical for the discrimina-
tion of Fear from Sadness and for characterization of
Happiness – need separate processing. Thus, in fu-
ture, we intend to develop separate iris and lip corner
detectors to improve the emotion recognition perfor-
mance.
5
http://themusegarden.wordpress.com/2013/05/16/kinect-
face-tracking-results-thesis-update-4/
Facial Emotion Recognition from Kinect Data â
˘
A¸S An Appraisal of Kinect Face Tracking Library
531

ACKNOWLEDGEMENT
The authors acknowledge the TCS Research Scholar
Program for financial support.
REFERENCES
Black, M. J. and Yacoob, Y. (1995). Recognizing facial
expressions in image sequences using local parame-
terized models of image motion. International Conf.
on Computer Vision, pages 374–381.
Cohen, I., Sebe, N., Garg, A., Lew, M. S., and Huang, T. S.
(2003). Facial expression recognition from video se-
quences: temporal and static modeling. Computer Vi-
sion and Image Understanding, 91.
Cohn, J. F., Zlochower, A. J., Lien, J. J., and Kanade, T.
(1998). Feature-point tracking by optical flow dis-
criminates subtle differences in facial expression. In-
ternational Conference on Automatic Face and Ges-
ture Recognition, pages 396–401.
Ekman, P. and Friesen, W. (1978). Facial action coding
system: A technique for measurement of facial move-
ment. Palo Alto, CA.: Consulting Psychologists Press.
Essa, I. A. and Pentland, A. P. (1997). Coding, analysis,
interpretation, recognition of facial expressions. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 19:757–763.
Hung, D., Kim, H., and Huang, S. (1996). Mod-
eling six Universal Emotions. in Human Fa-
cial Modeling Project at Cornell University.
http://www.nbb.cornell.edu/neurobio/land/oldstudent
projects/cs490-95to96/hjkim/emotions.html.
Last accessed on 27-Sep-2015.
Kim, D. and Bien, Z. (2003). Fuzzy neural networks
(fnn)-based approach for personlized facial expression
recognition novel feature selection method. IEEE In-
ternational Conference on Fuzzy Systems, 2:908–913.
Kim, M. H., Joo, Y. H., and Park, J. B. (2005). Emotion
detection algorithm using frontal face image. In Com-
puter Applications in Shipbuilding (ICCAS 2005),
12th International Conference on, pages 2373–78.
Kołakowska, A., Landowska, A., Szwoch, M., Szwoch, W.,
and Wr
´
obel, M. R. (2013). Emotion recognition and
its application in software engineering. In Human Sys-
tem Interaction, 6th International Conference on.
Link
¨
oping, U. (2012). Candide3 Model.
http://www.icg.isy.liu.se/candide/main.html. Last
updated on 24-May-2012. Last accessed on 27-Sep-
2015.
Microsoft (2014). Face Tracking SDK. http://msdn.
microsoft.com/en-us/library/jj130970.aspx. Last ac-
cessed on 27-Sep-2015.
Nelson, A. (2013). Facial expression analysis with Kinect.
http://themusegarden.wordpress.com/2013/02/02/
facial-expression-analysis-with-kinect-thesis-update-
1/ and the linked updates. Last accessed on 27-Sep-
2015.
Nissen, S. (2014). Fast Artificial Neural Network.
http://leenissen.dk/fann/wp/. Last accessed on 27-
Sep-2015.
Pantic, M. and Patras, I. (2006). Dynamics of facial expres-
sion: Recognition of facial actions and their temporal
segments from face profile image sequences. IEEE
Trans. Systems, Man, and Cybernetics - Part B: Cy-
bernetics, 36:433–449.
Tian, Y., Kanade, T., and Cohn, J. F. (2001). Recognizing
action units for facial expression analysis. IEEE trans-
actions on pattern analysis and machine intelligence,
23(2).
Tsapatsoulis, N. and Piat, F. (2000). Exploring the time
course of facial expressions with a fuzzy system. Na-
tional Technical University of Athens.
Mellon University, C. (2015). Facial Action Coding Sys-
tem. http://www.cs.cmu.edu/ face/facs.htm. Last up-
dated on 24-Apr-2014. Last accessed on 27-Sep-2015.
Wu, T., Fu, S., and Yang, G. (2012). Survey of the facial ex-
pression recognition research. Advances in Brain In-
spired Cognitive Systems, Lecture Notes in Computer
Science, 7366.
Wyrembelski, A. (2013). Detection of the se-
lected, basic emotions based on face ex-
pression using Kinect. Unpublished Report.
http://stc.fs.cvut.cz/pdf13/2659.pdf. Last accessed on
27-Sep-2015.
Yang, D., Kunihiro, T., Shimoda, H., and Yoshikawa., H.
(1999). A study of realtime image processing method
for treating human emotion by facial expression. In-
ternational Conference on System, Man and Cyber-
netics (SMC99).
Yoneyama, M., Iwano, Y., Ohtake, A., and Shirai, K.
(1997). Facial expressions recognition using discrete
Hopfield neural networks. International Conference
on Information Processing, 3:117–120.
Youssef, A. E., Aly, S. F., Ibrahim, A. S., and Abbott, A. L.
(2013). Auto-optimized multimodal expression recog-
nition framework using 3d kinect data for asd ther-
apeutic aid. International Journal of Modeling and
Optimization, 3.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
532
